Download as PDF, PPTX

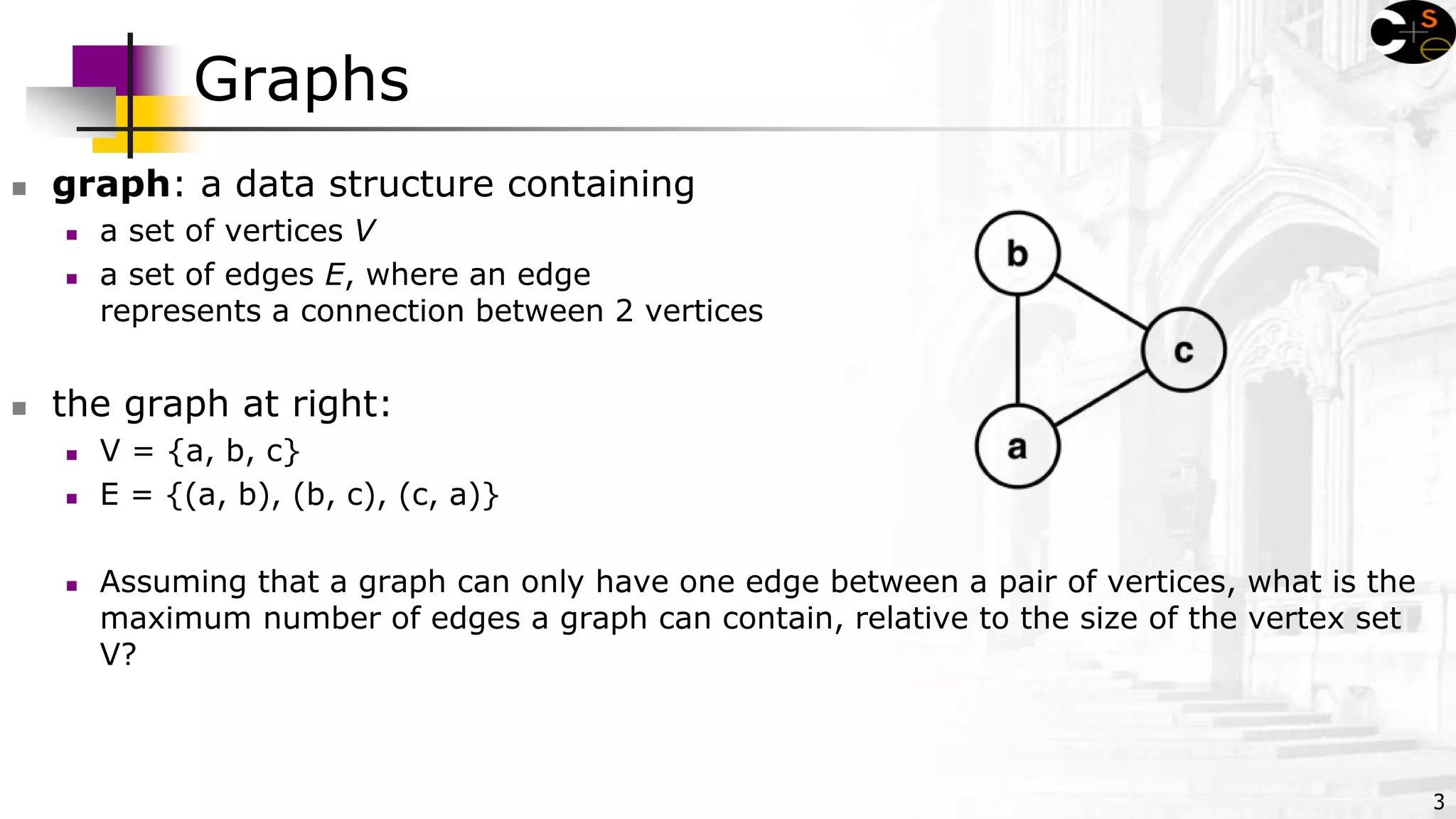
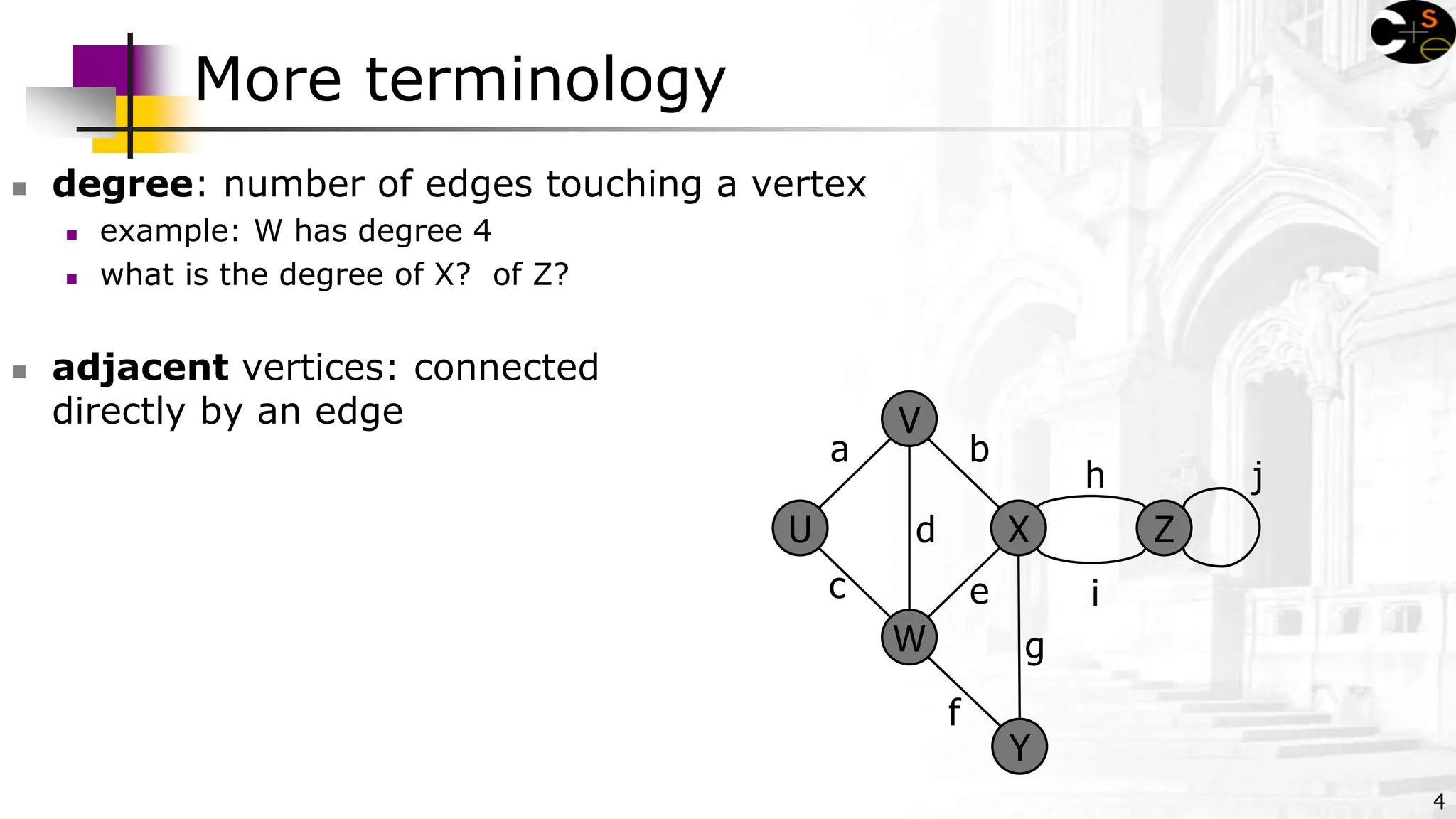
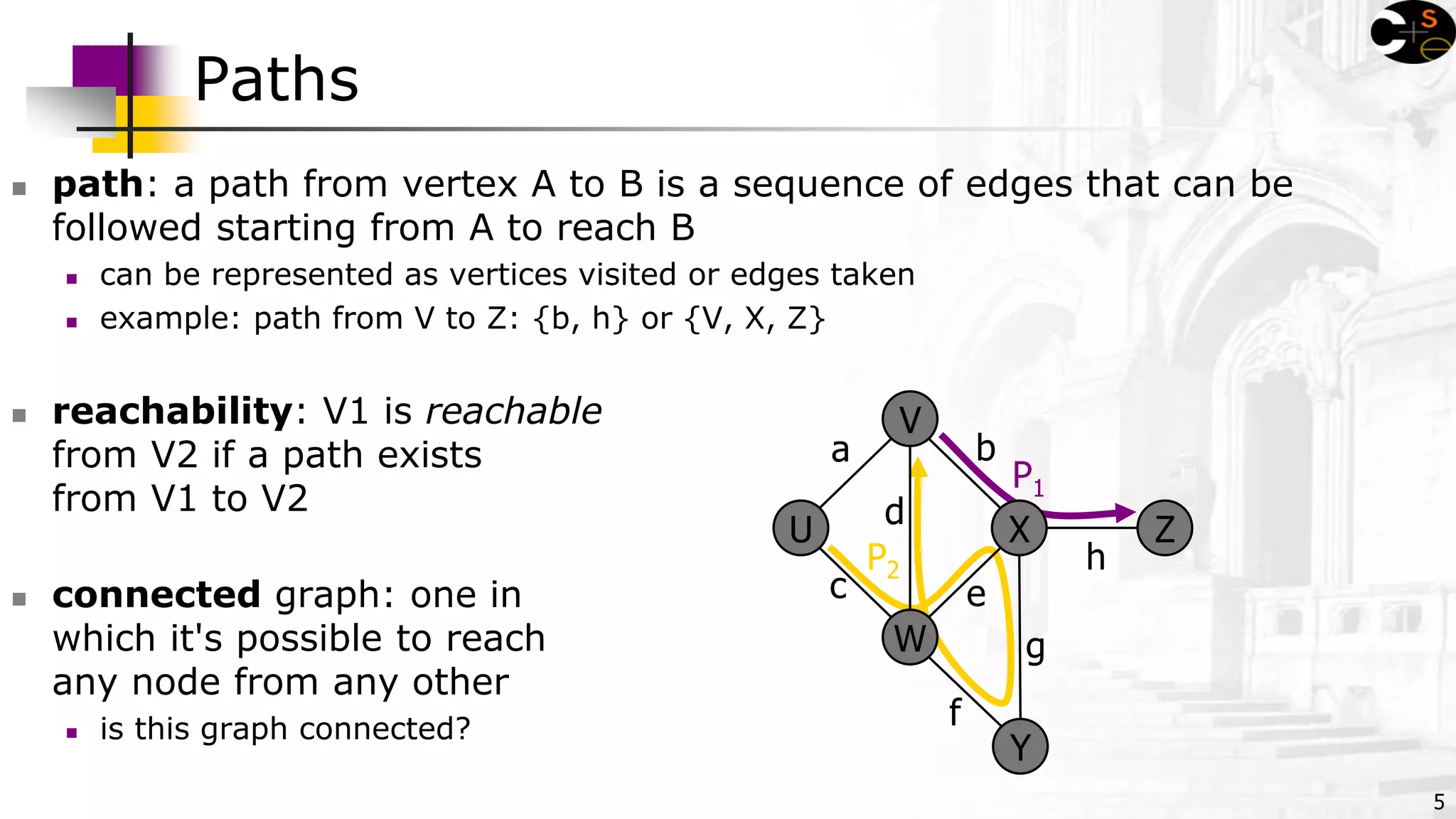
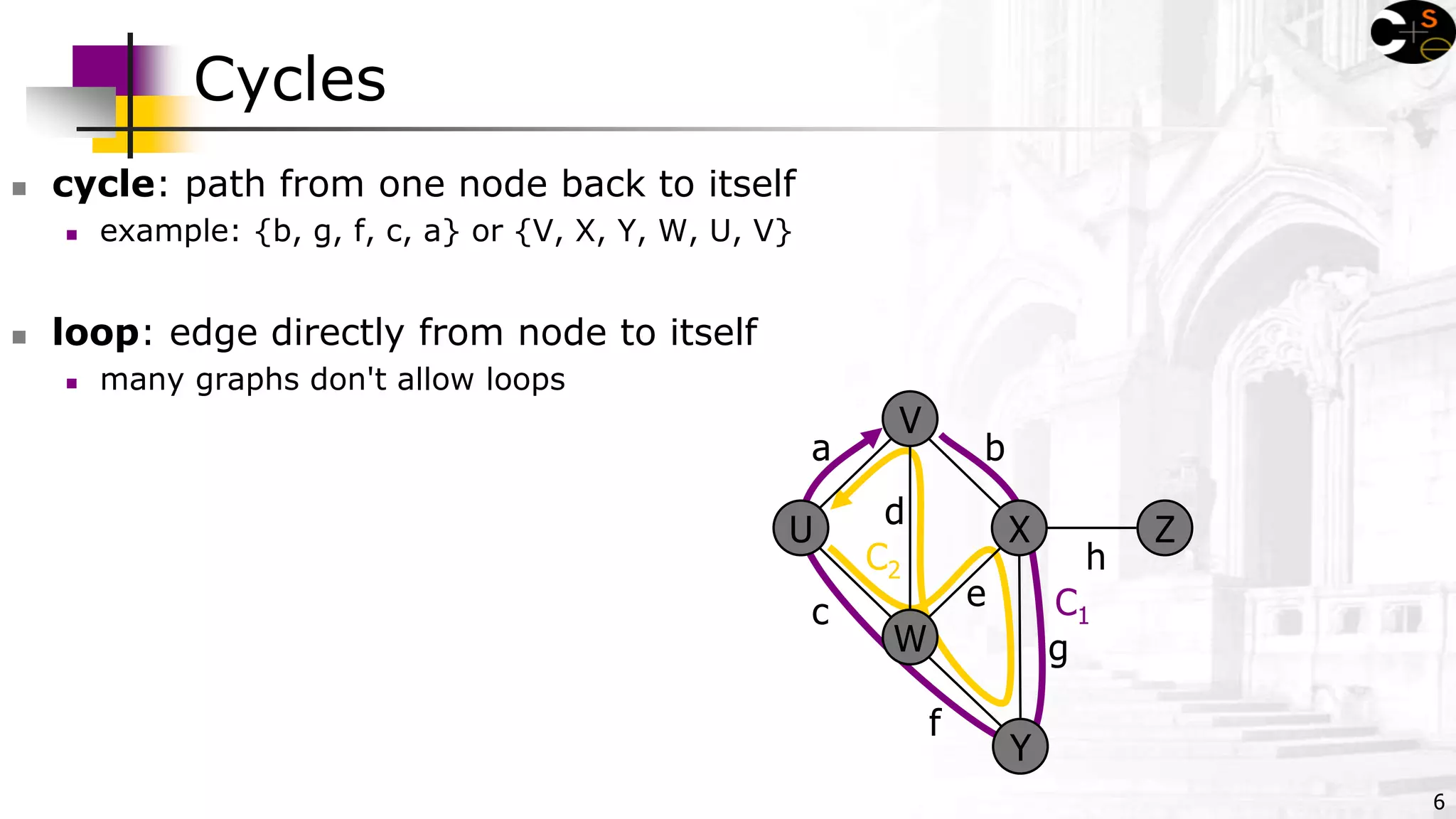
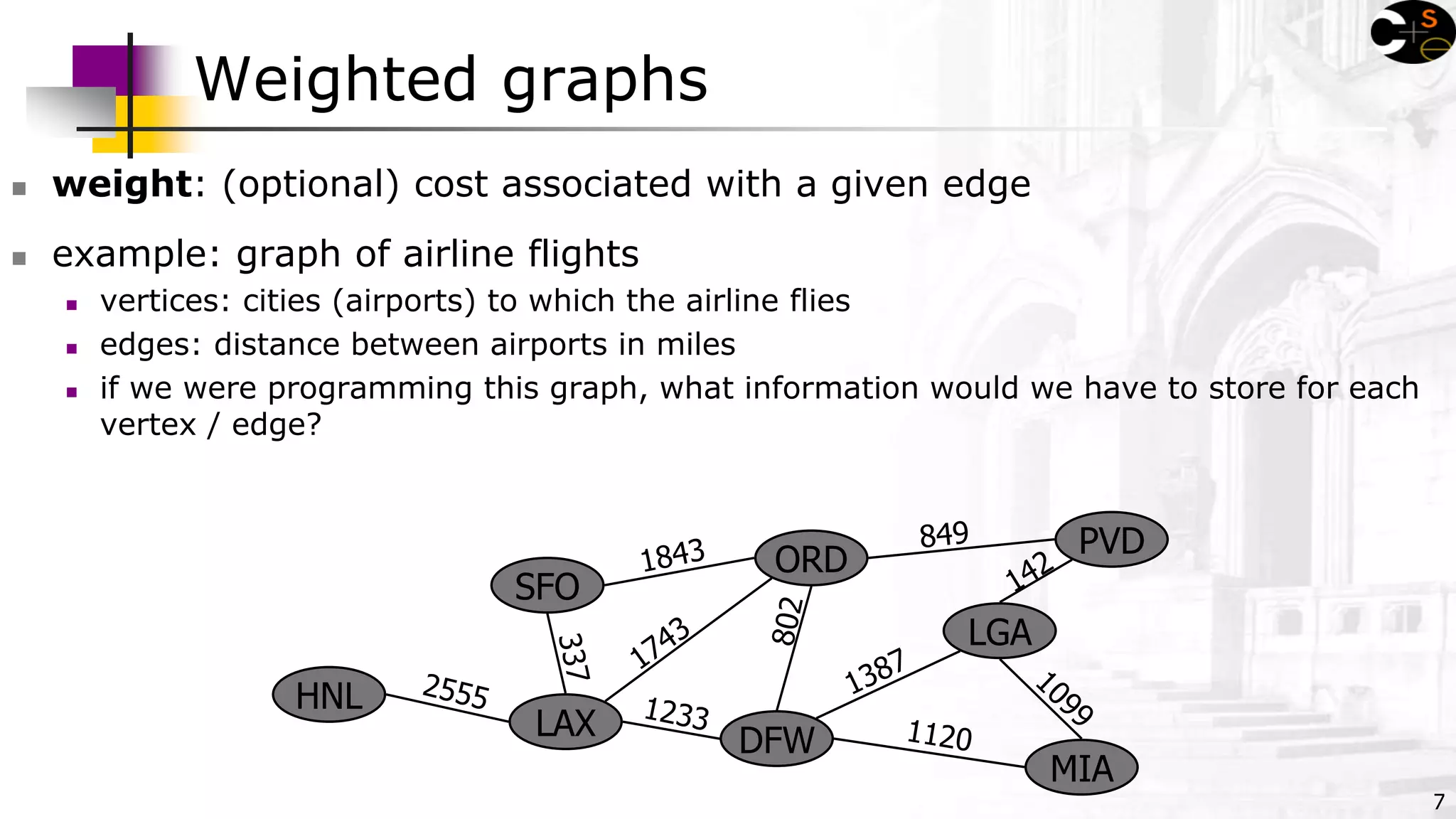
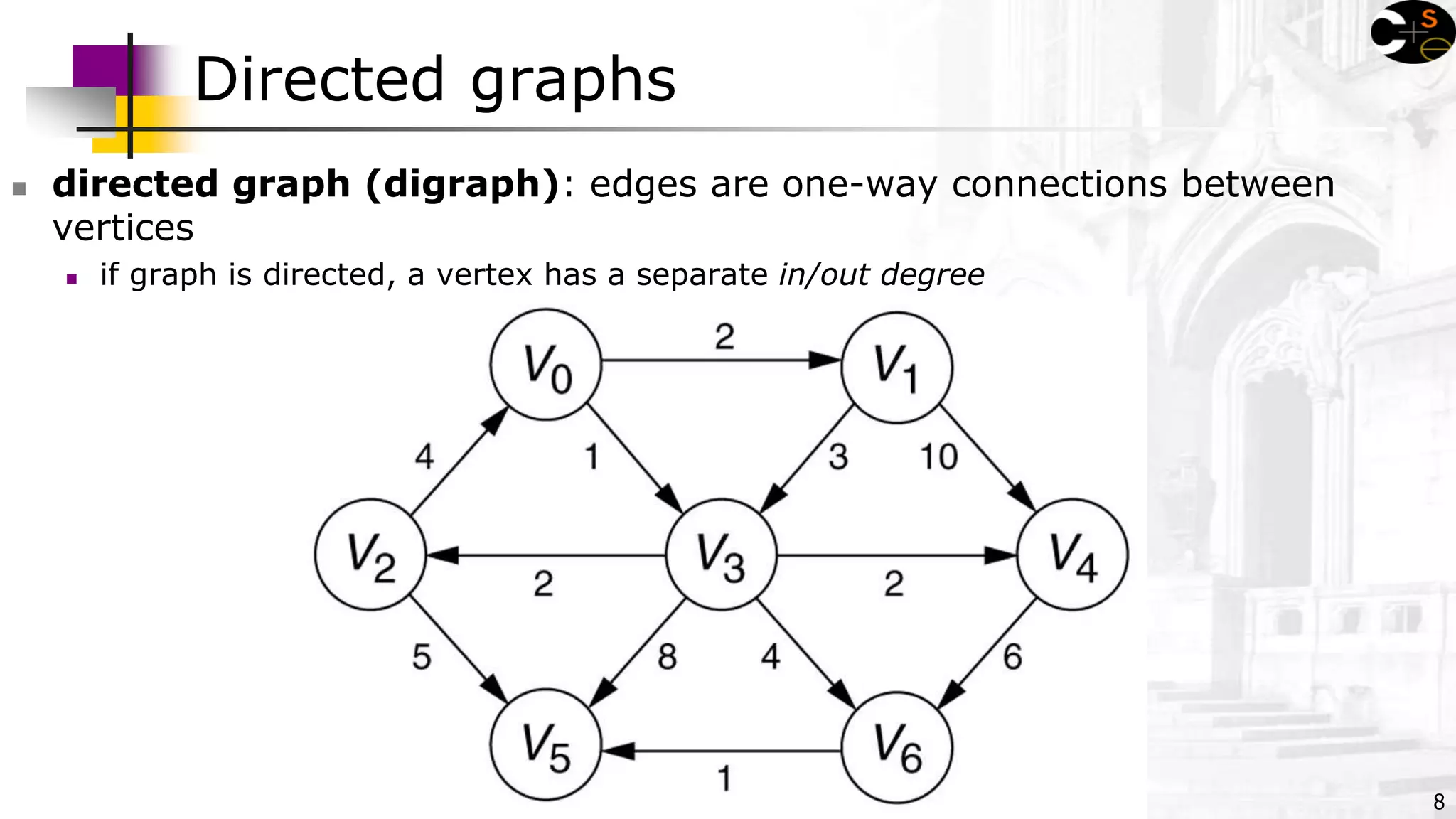
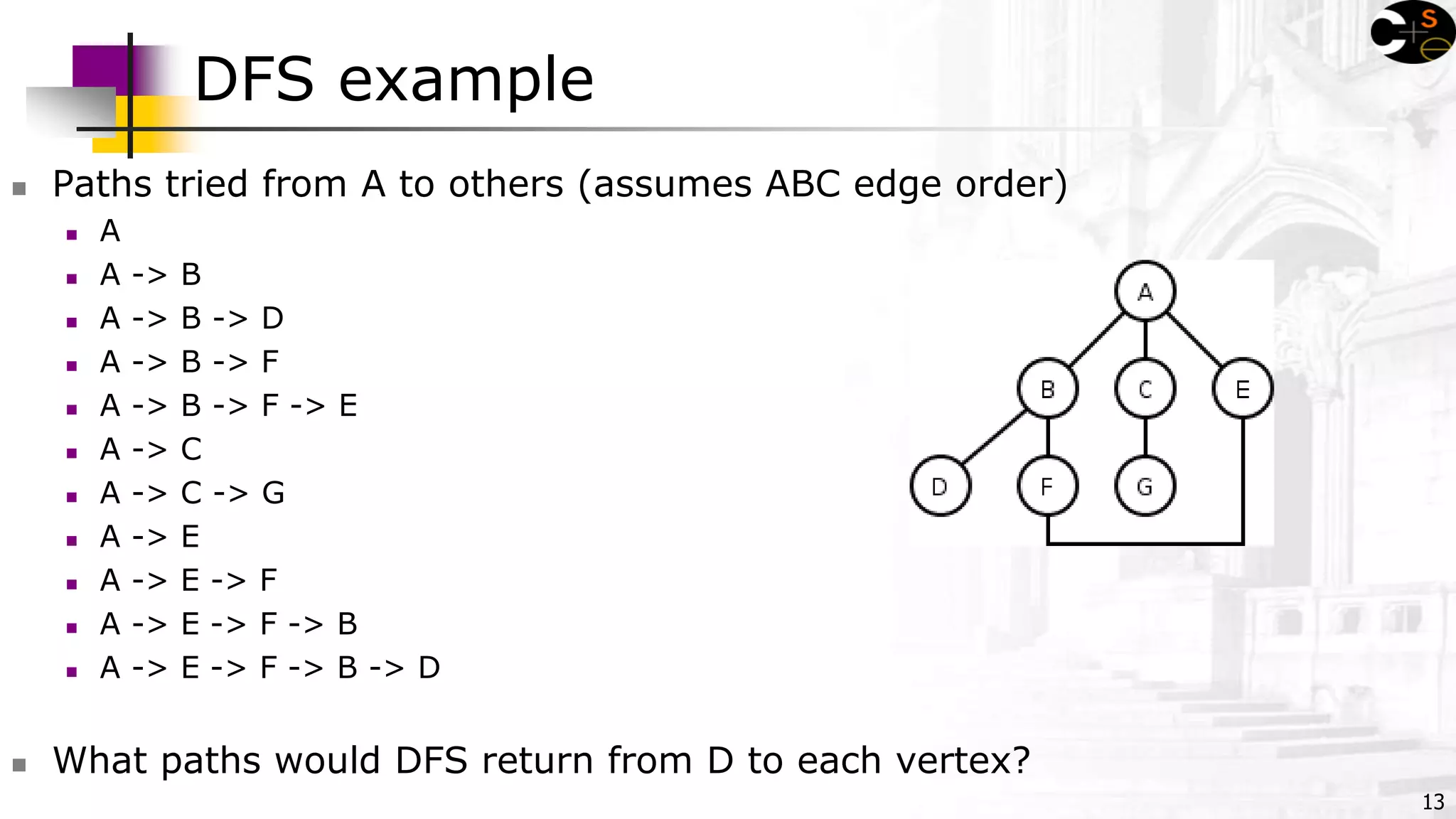
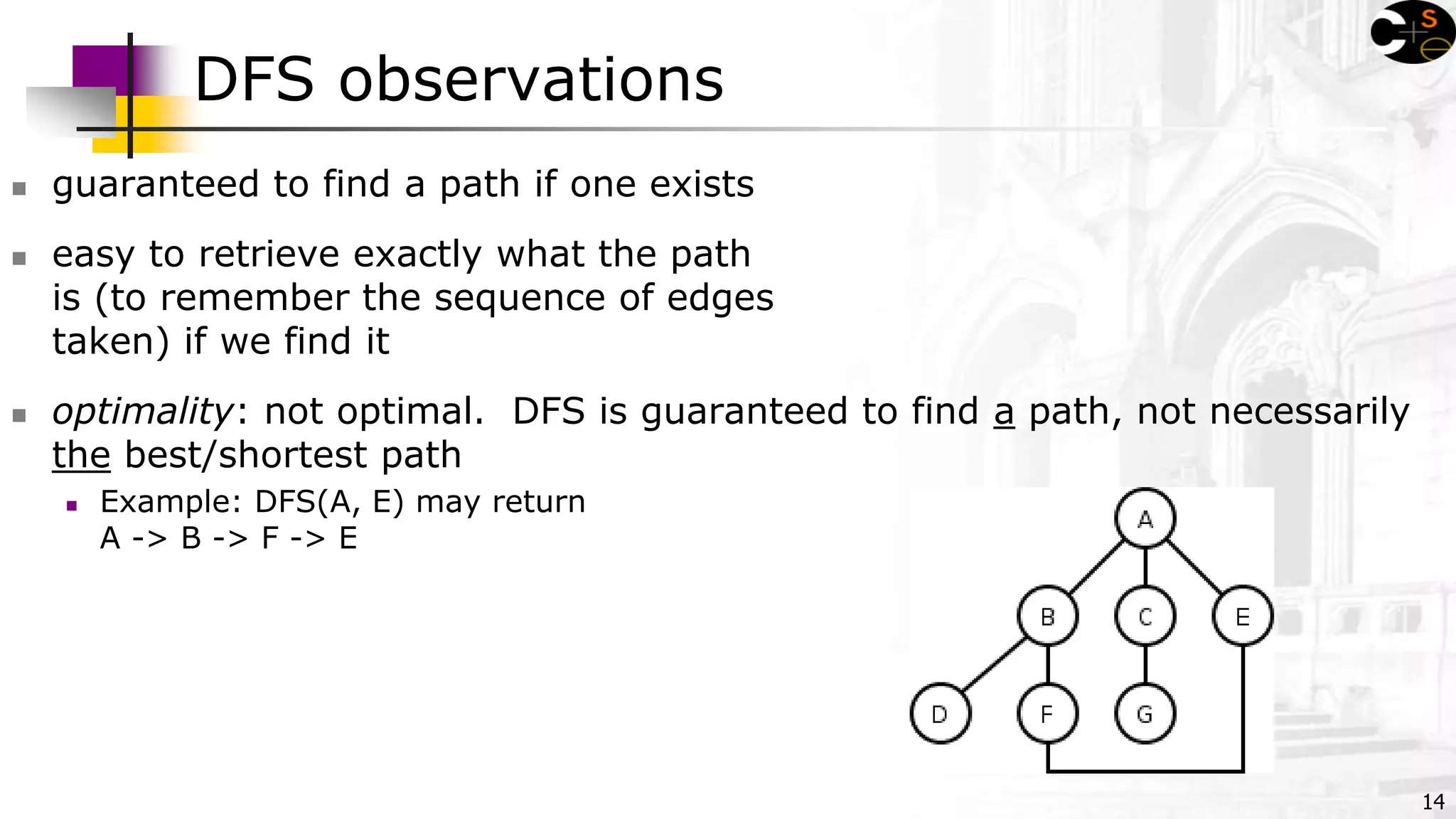
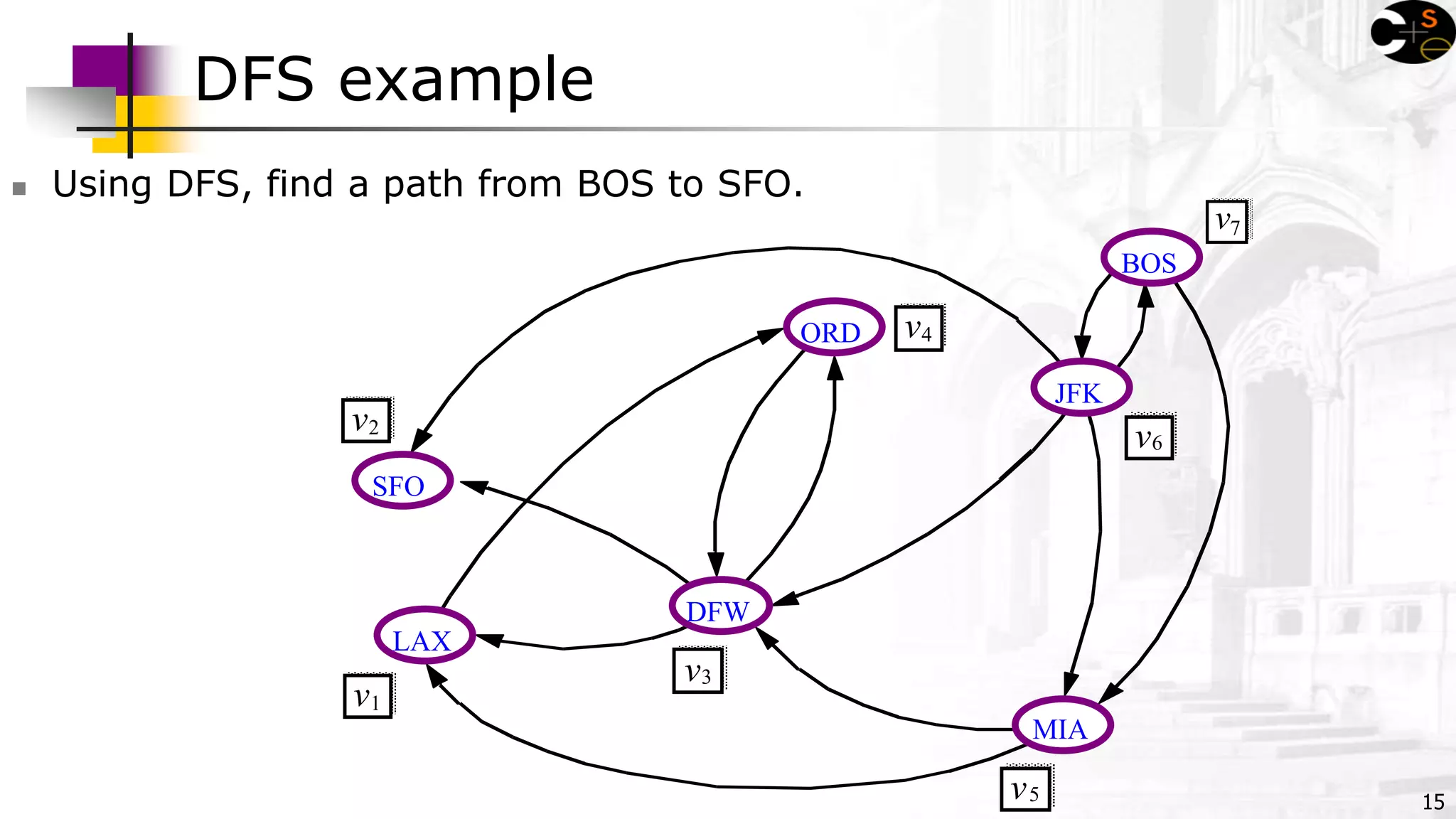
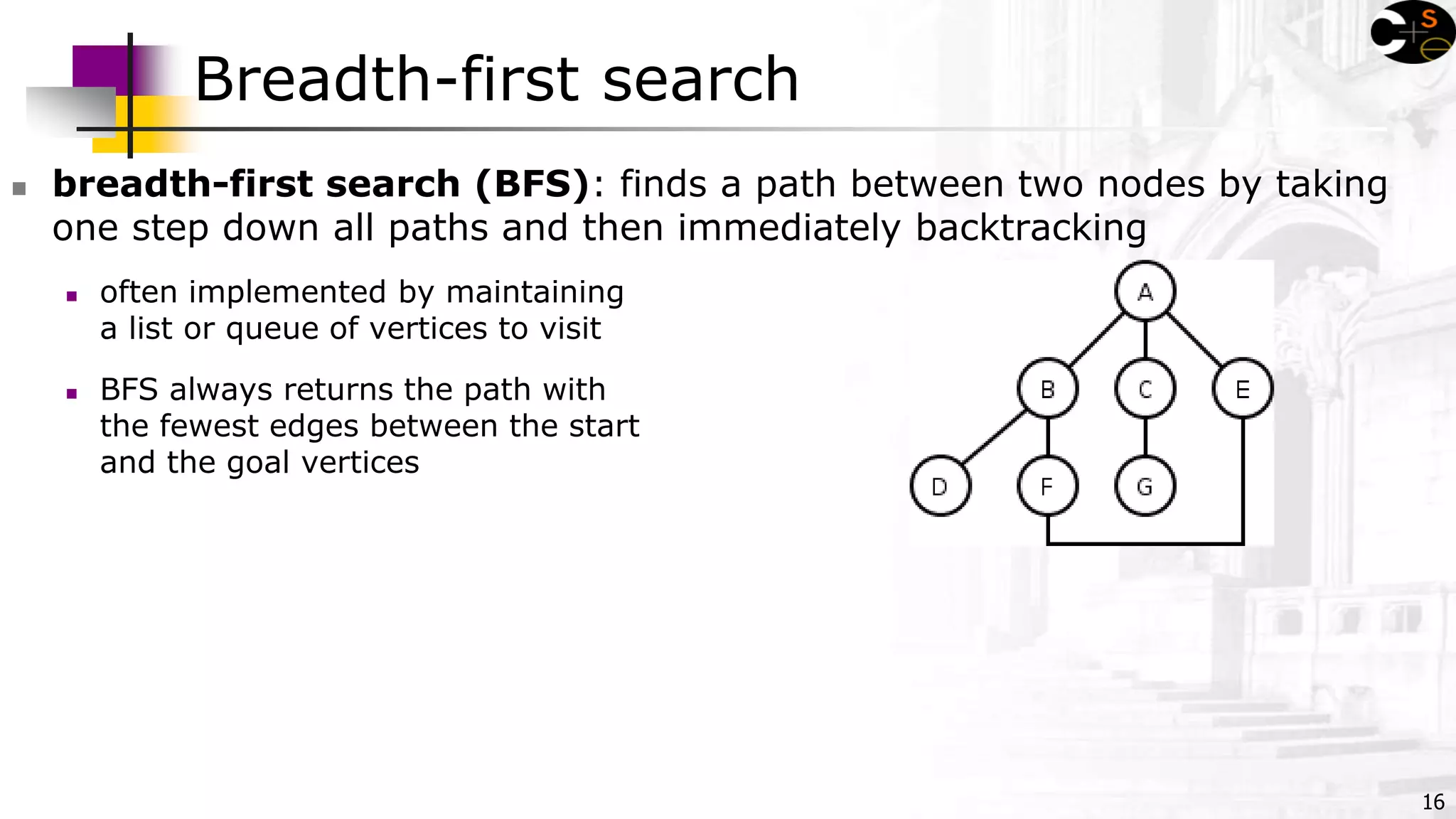
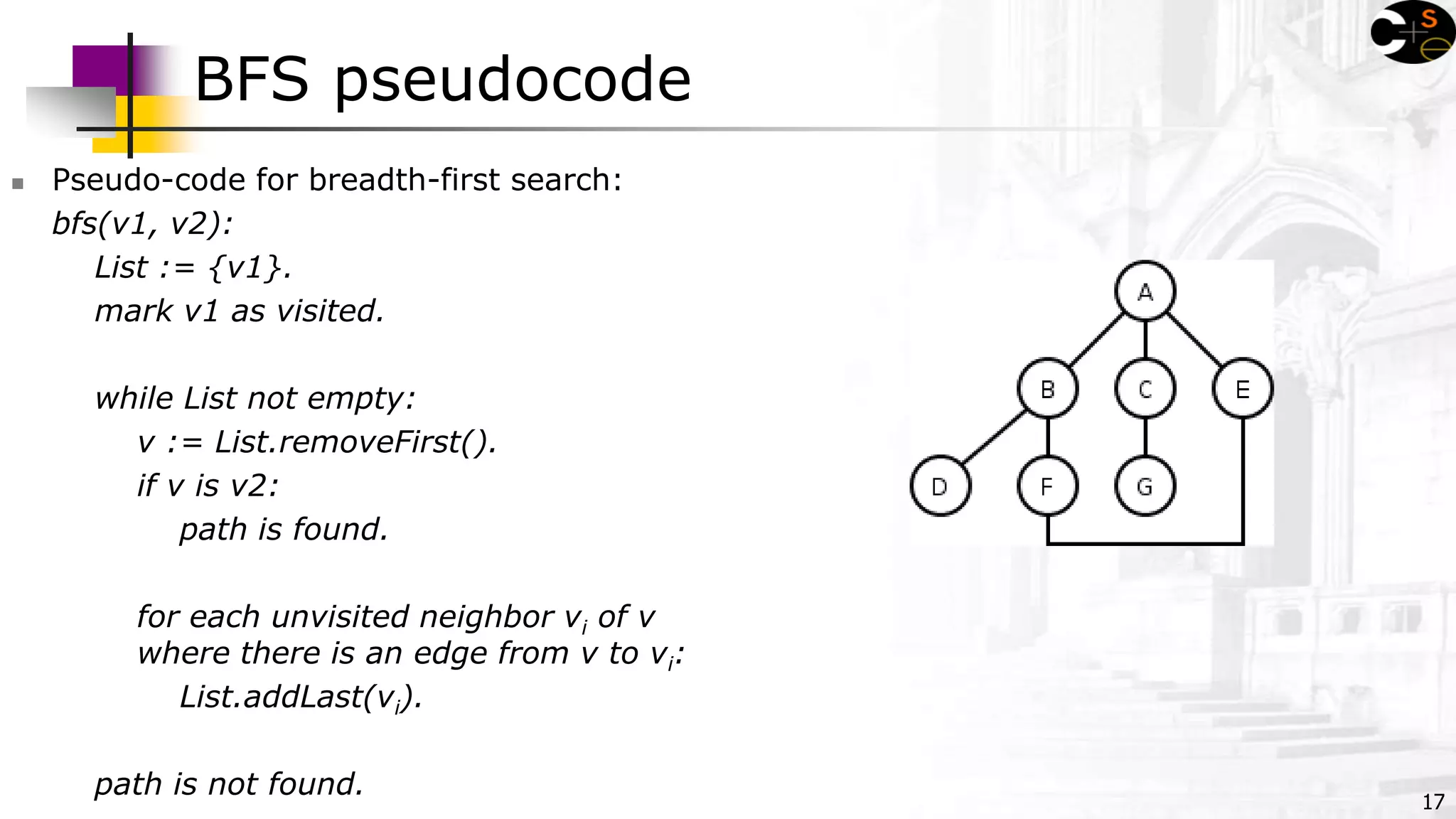
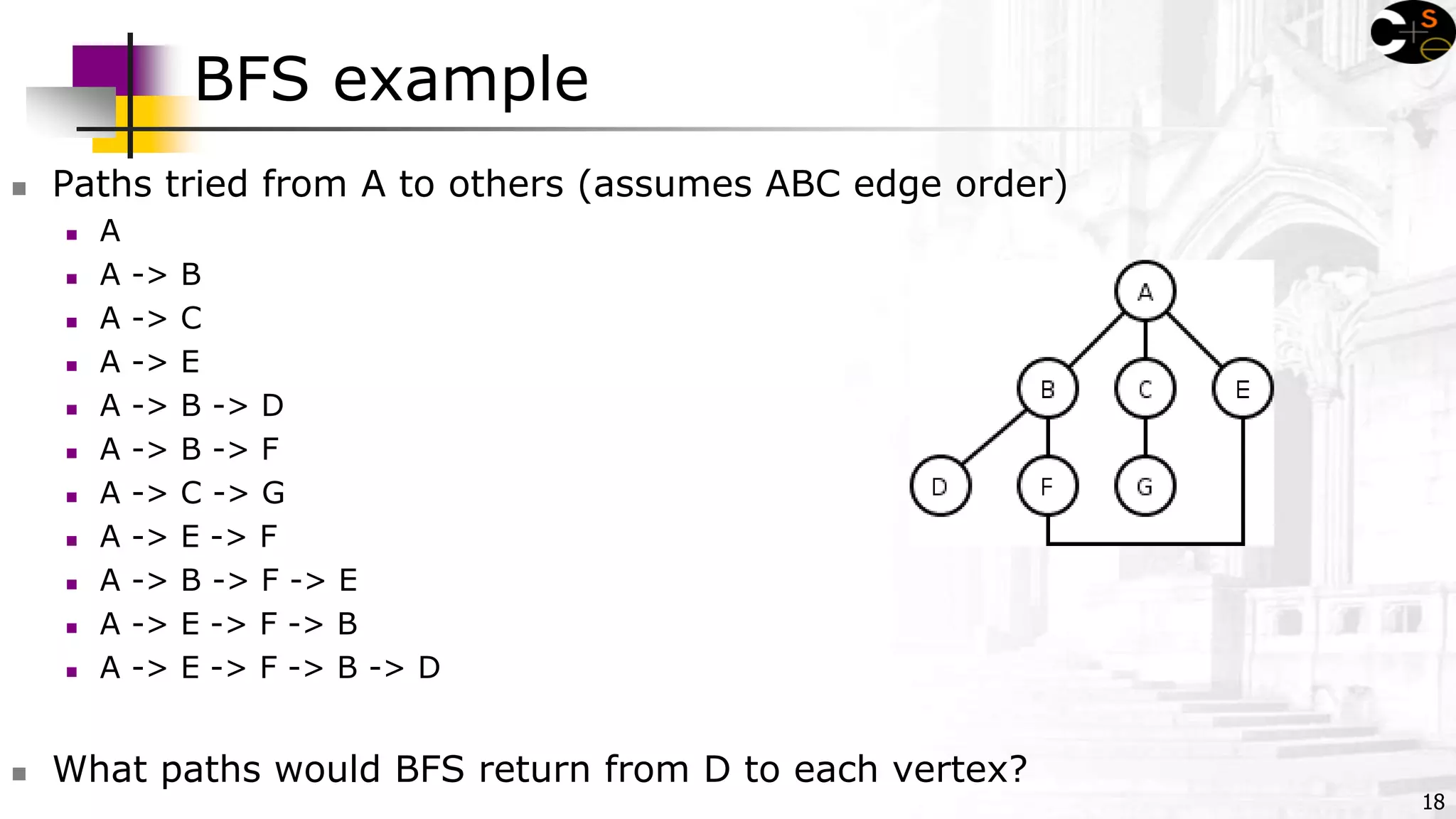
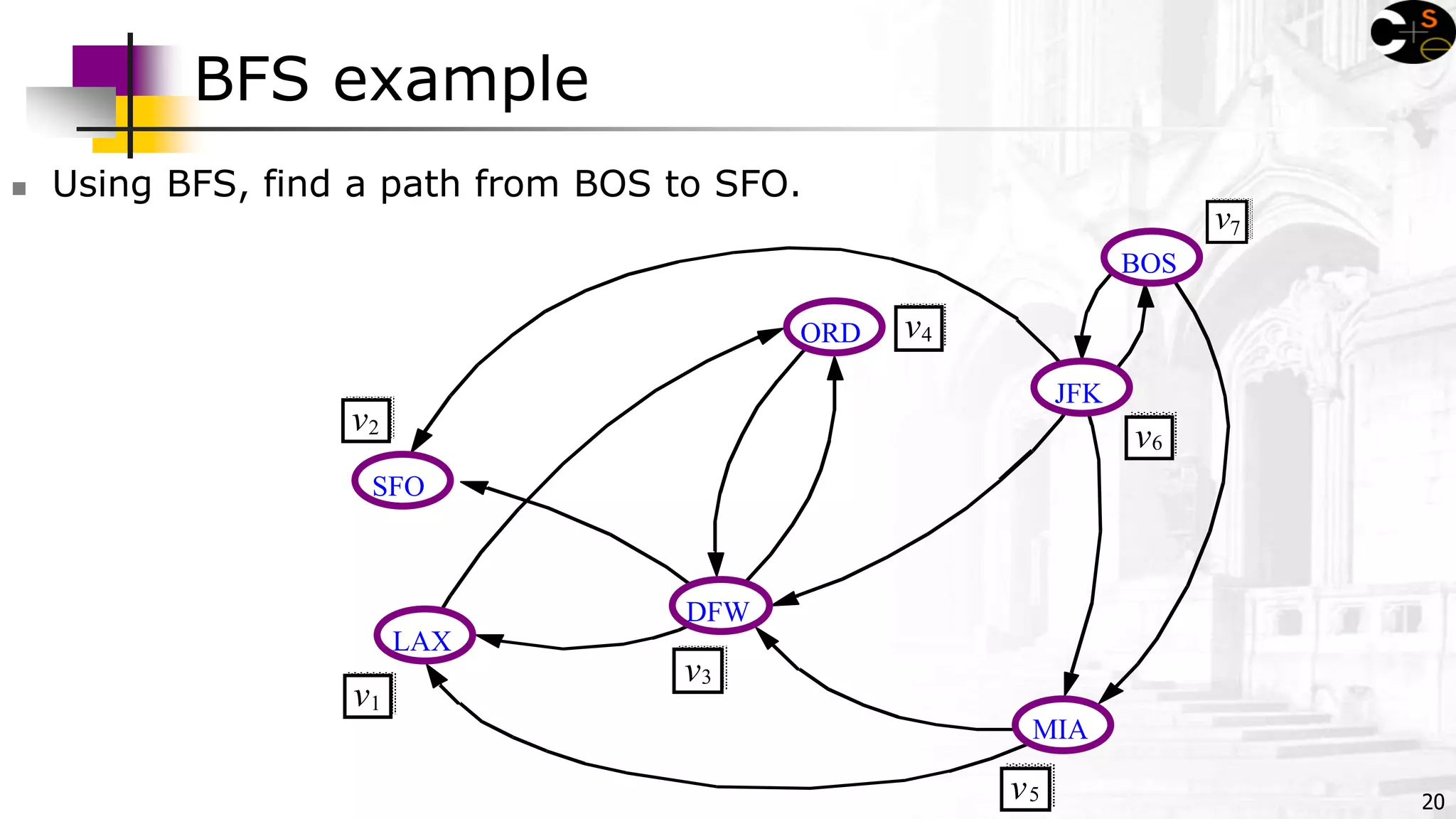
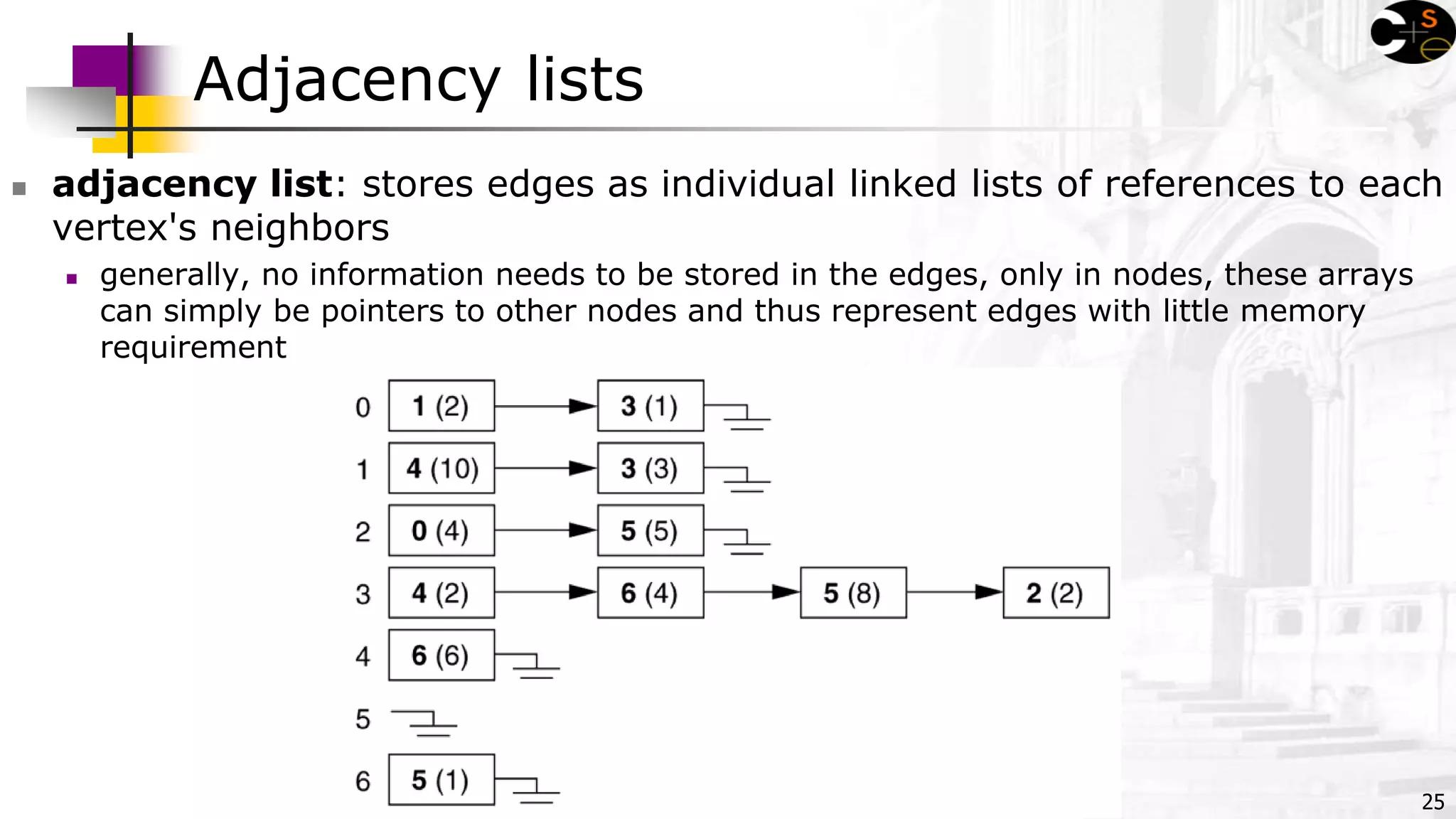
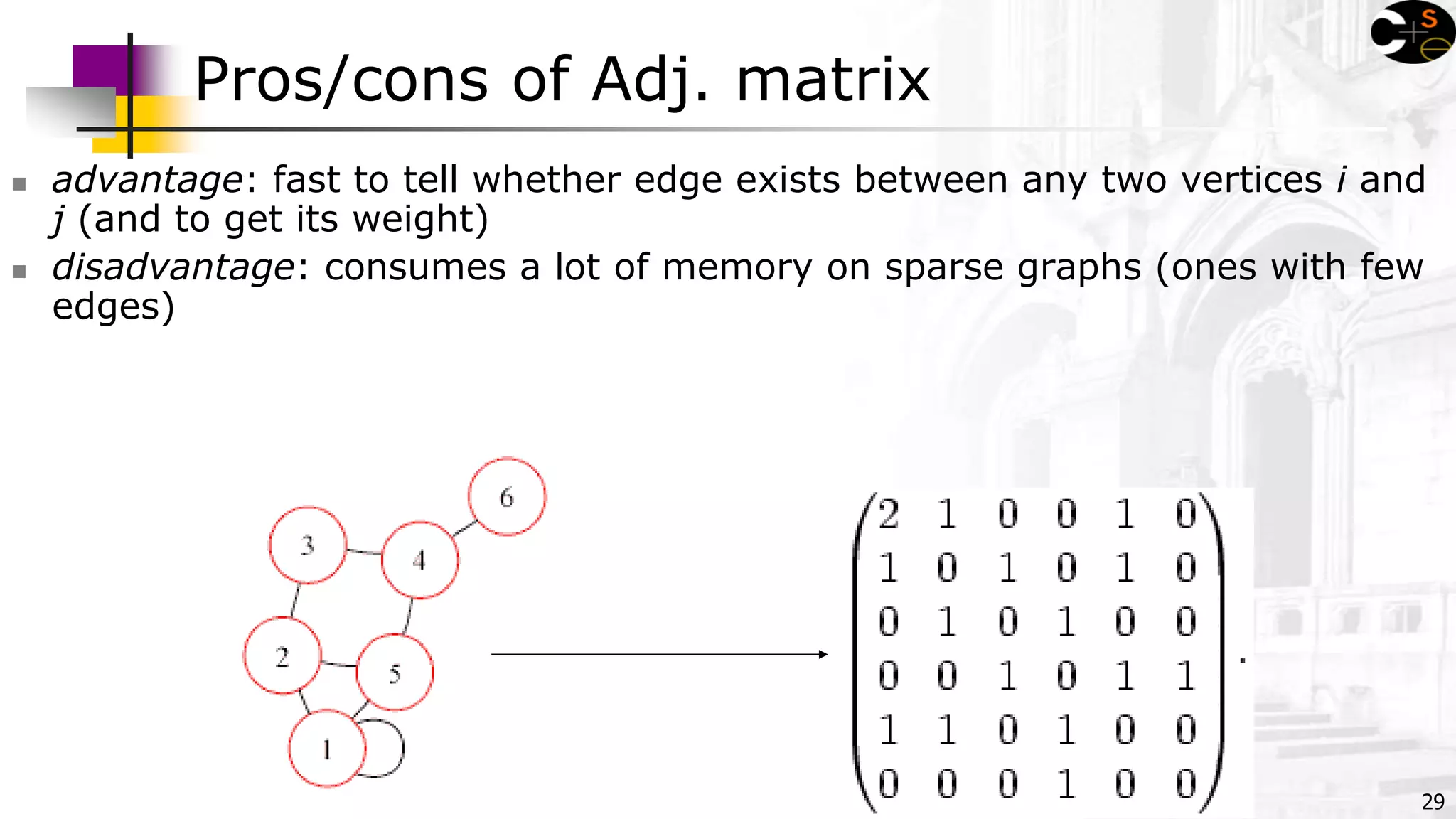
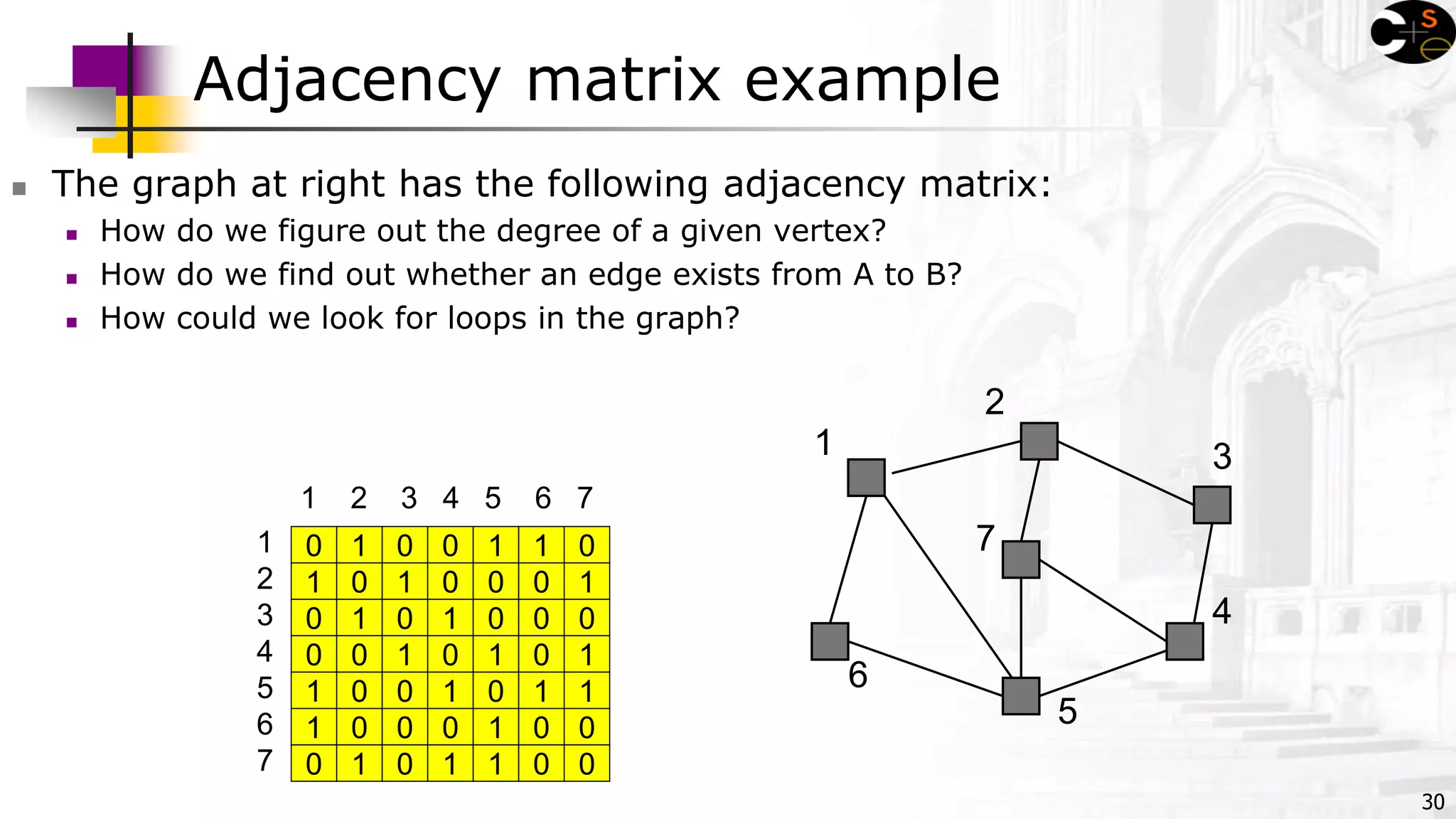
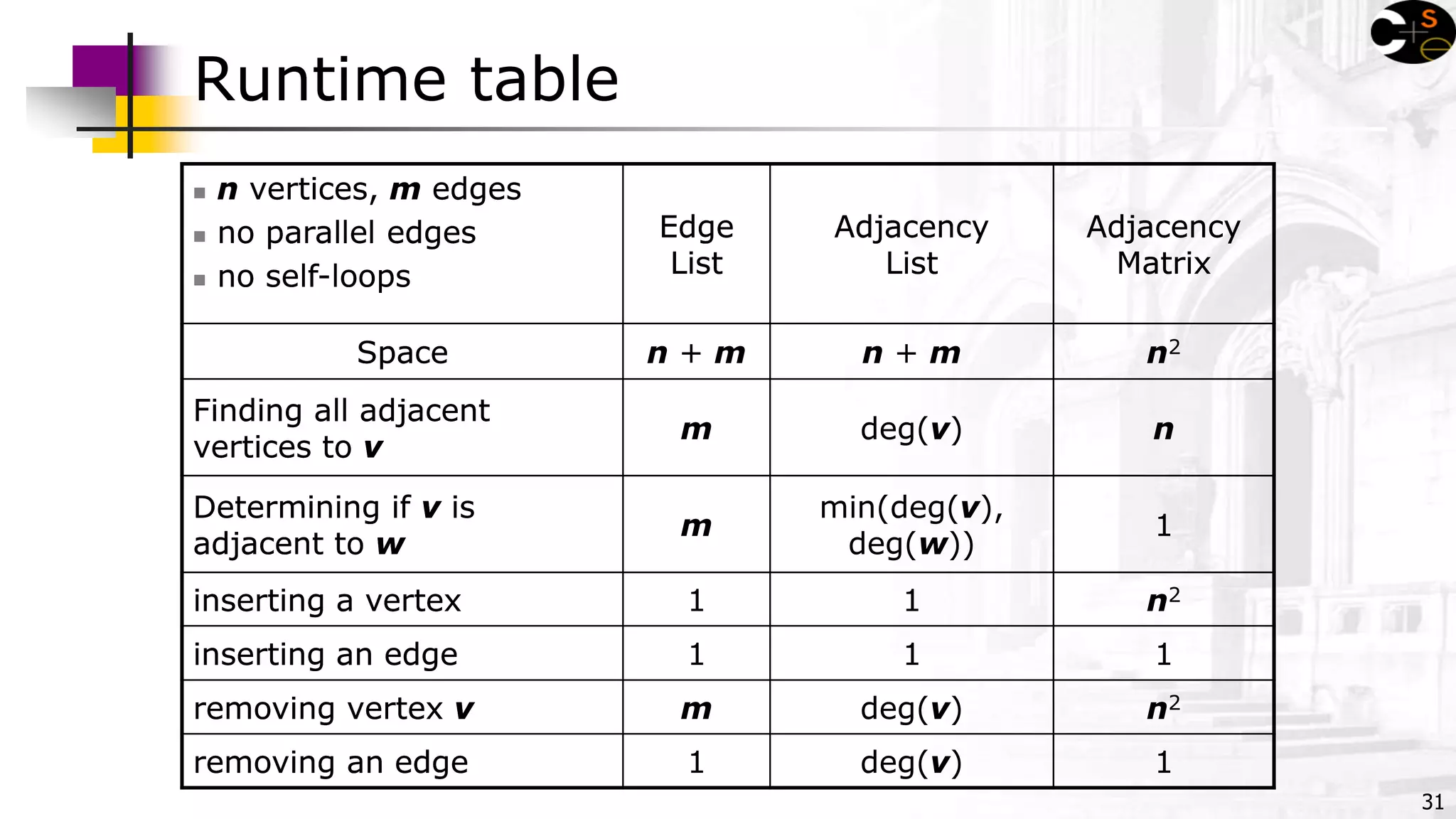
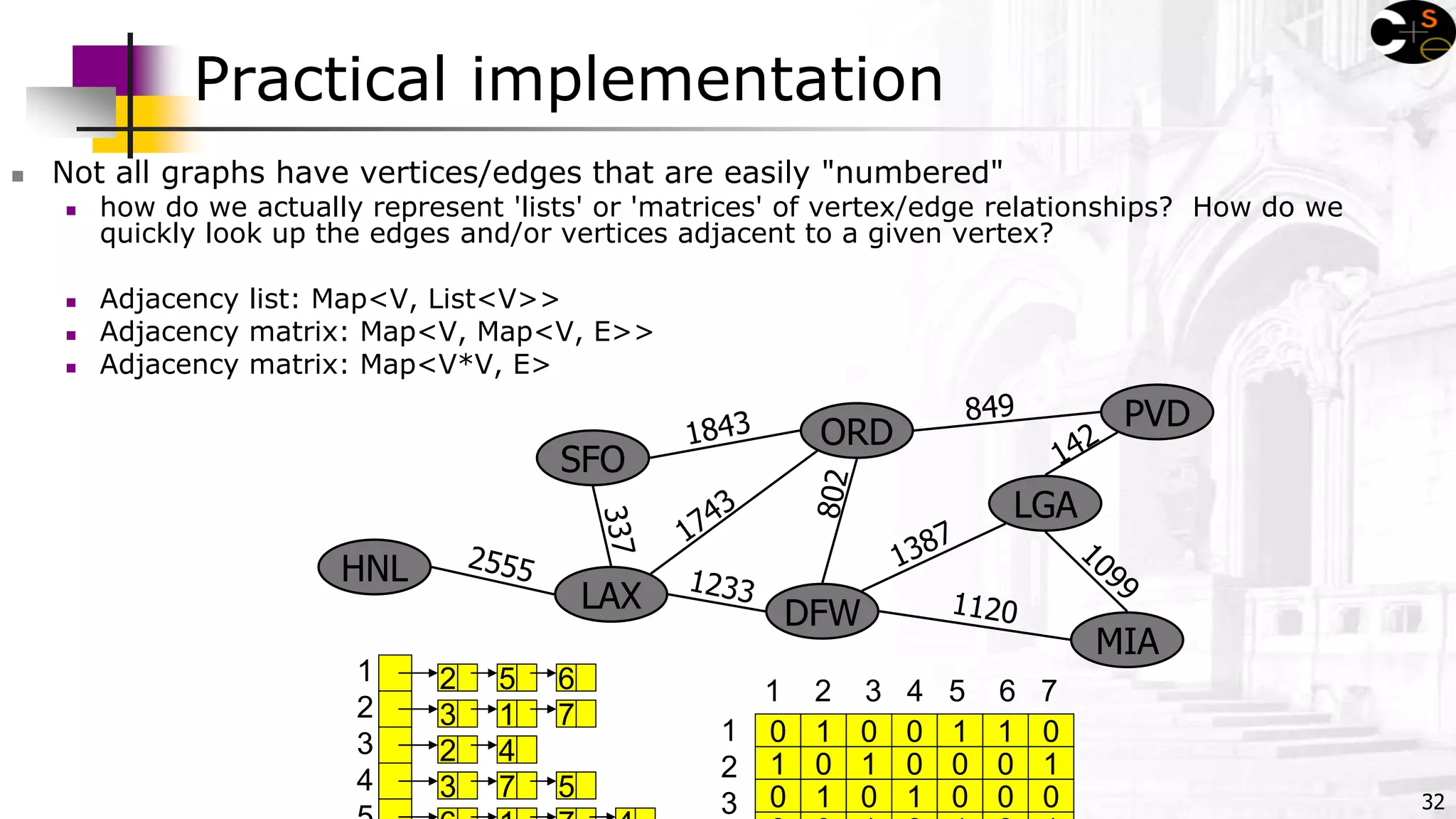
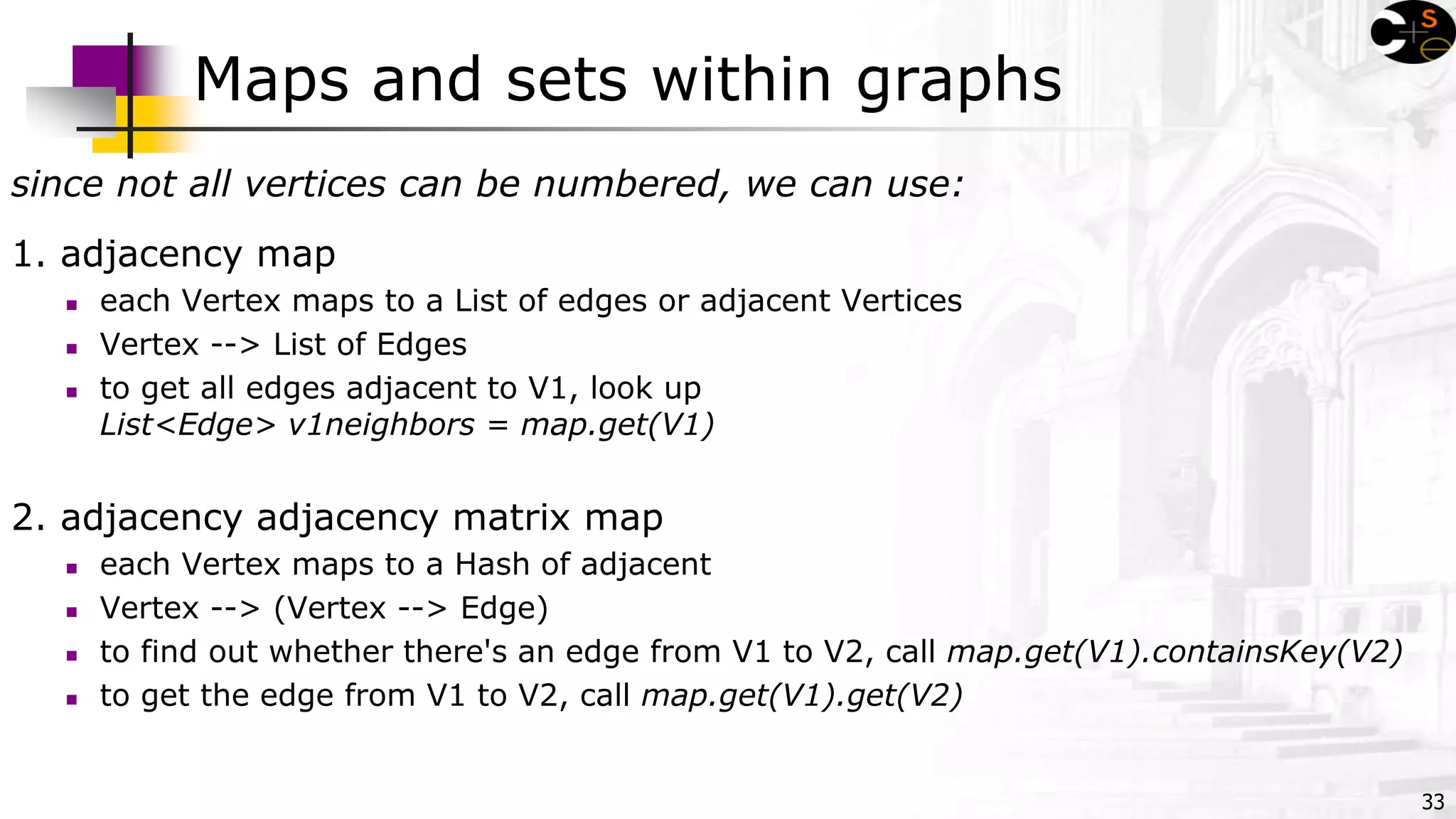


































The document outlines key concepts of graph theory, including vertices, edges, types of graphs, and methods for pathfinding such as depth-first search (DFS) and breadth-first search (BFS). It discusses graph representations through edge lists, adjacency lists, and adjacency matrices, along with their advantages and disadvantages. The document further explores practical implementation considerations and runtime complexities of various graph algorithms.









![Data Structures - Lecture 10 [Graphs]](https://cdn.slidesharecdn.com/ss_thumbnails/datastructures-lecture10graphs-150305004608-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)