2
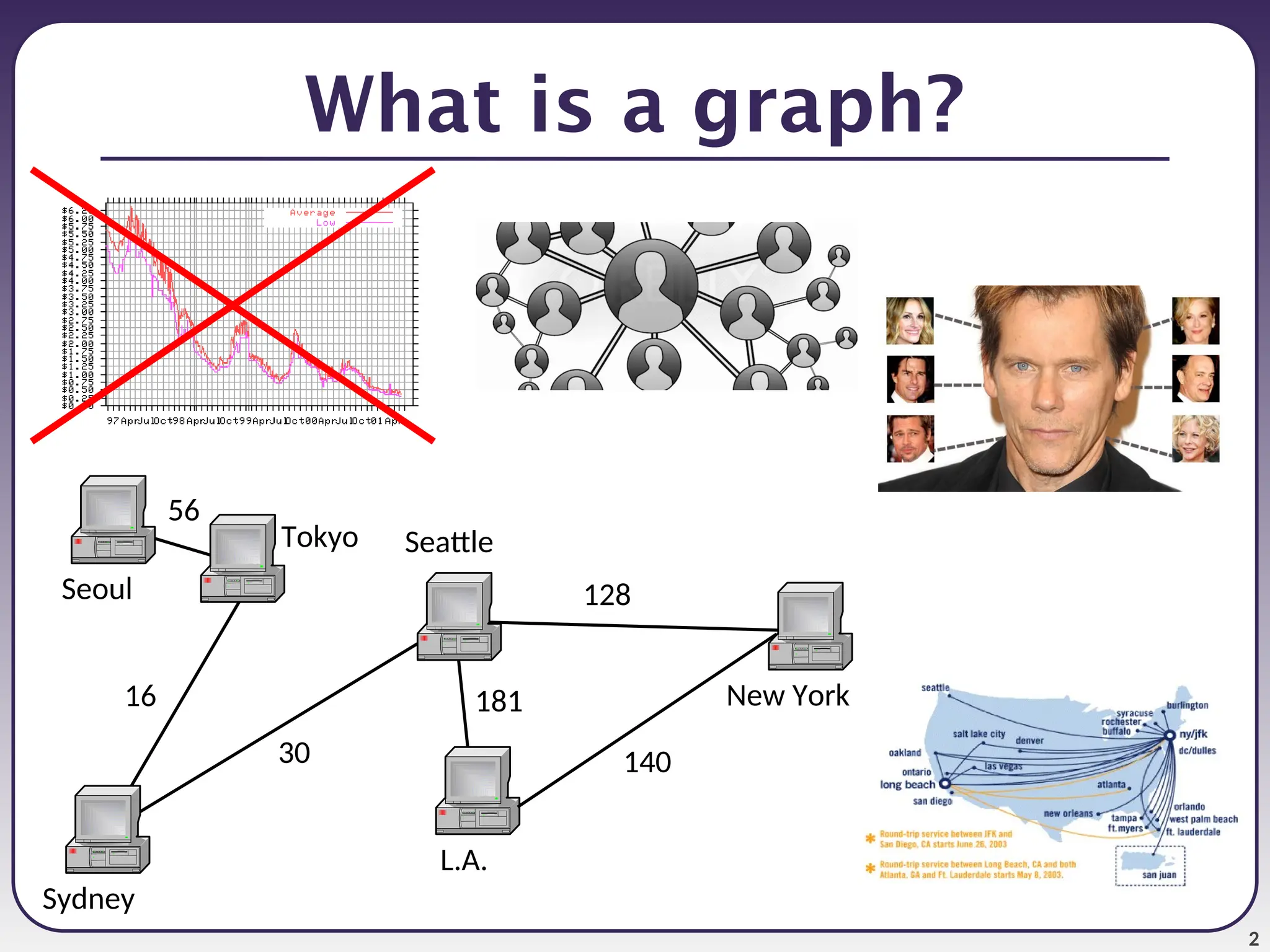
What is agraph?
Seattle
New York
L.A.
Tokyo
Sydney
Seoul 128
140
181
30
16
56
3.
3
Graphs
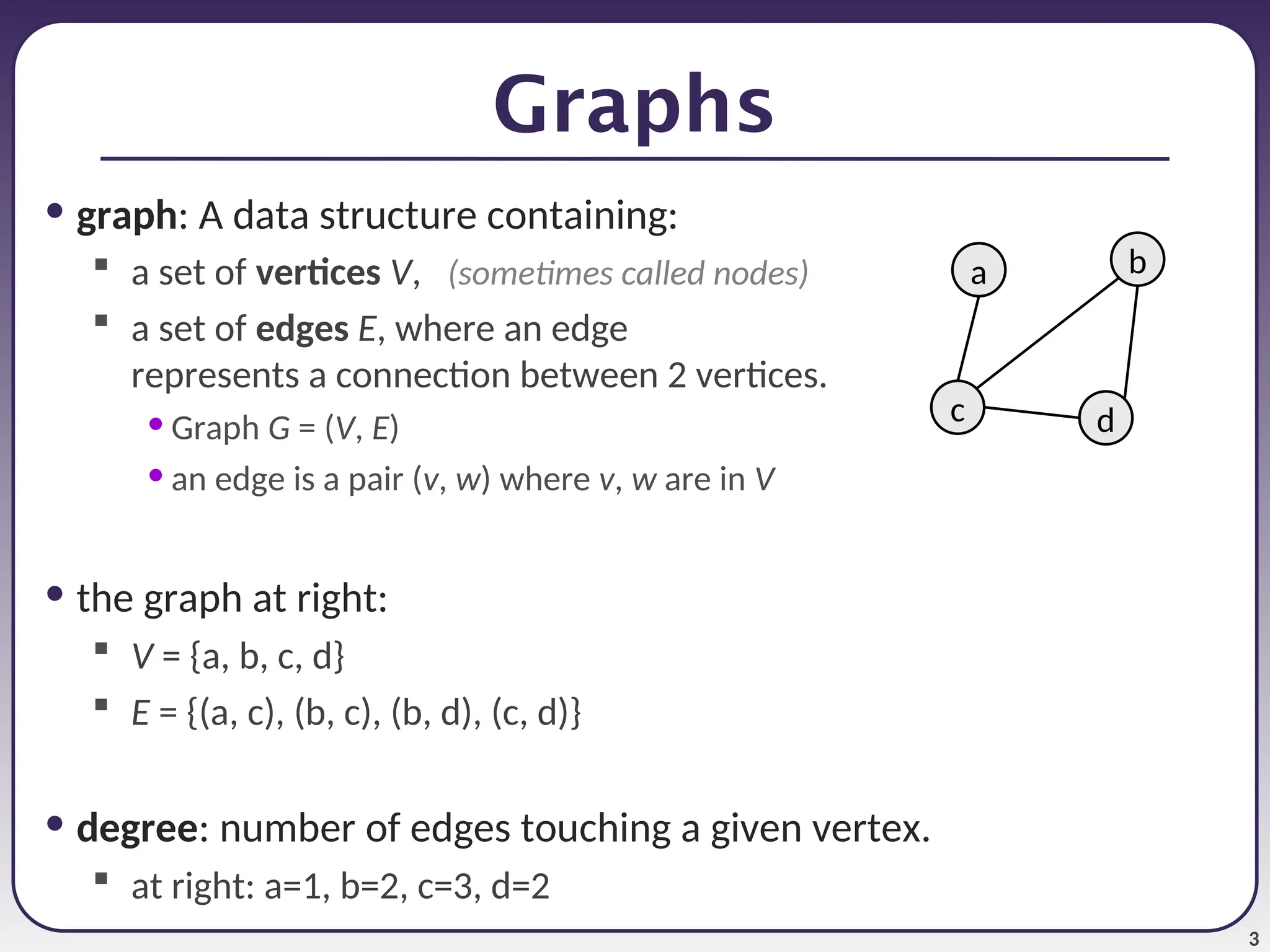
• graph: Adata structure containing:
a set of vertices V, (sometimes called nodes)
a set of edges E, where an edge
represents a connection between 2 vertices.
• Graph G = (V, E)
• an edge is a pair (v, w) where v, w are in V
• the graph at right:
V = {a, b, c, d}
E = {(a, c), (b, c), (b, d), (c, d)}
• degree: number of edges touching a given vertex.
at right: a=1, b=2, c=3, d=2
a
c
b
d
4.
4
Graph examples
• Foreach, what are the vertices and what are the edges?
Web pages with links
Methods in a program that call each other
Road maps (e.g., Google maps)
Airline routes
Facebook friends
Course pre-requisites
Family trees
Paths through a maze
5.
5
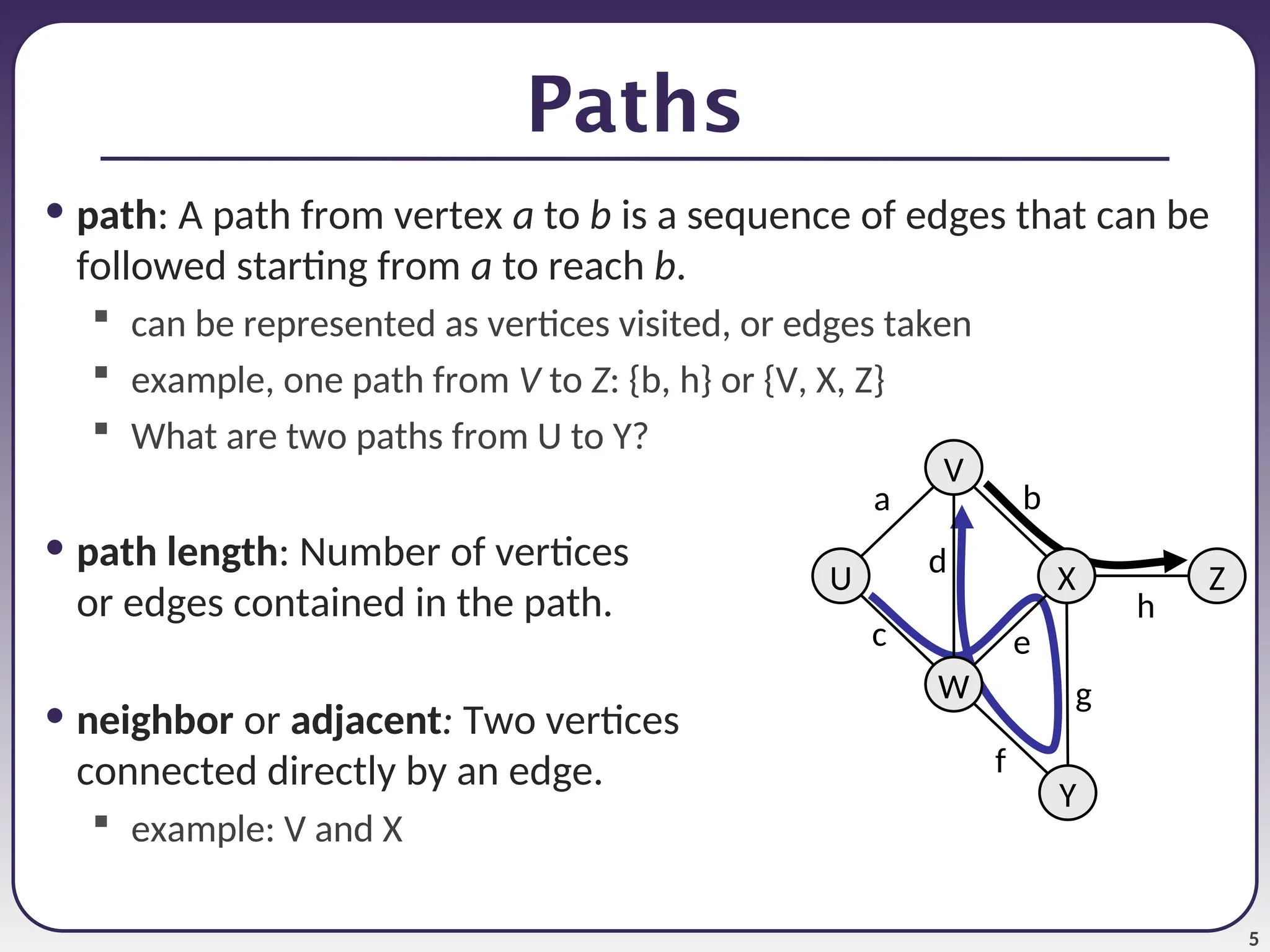
Paths
• path: Apath from vertex a to b is a sequence of edges that can be
followed starting from a to reach b.
can be represented as vertices visited, or edges taken
example, one path from V to Z: {b, h} or {V, X, Z}
What are two paths from U to Y?
• path length: Number of vertices
or edges contained in the path.
• neighbor or adjacent: Two vertices
connected directly by an edge.
example: V and X
X
U
V
W
Z
Y
a
c
b
e
d
f
g
h
6.
6
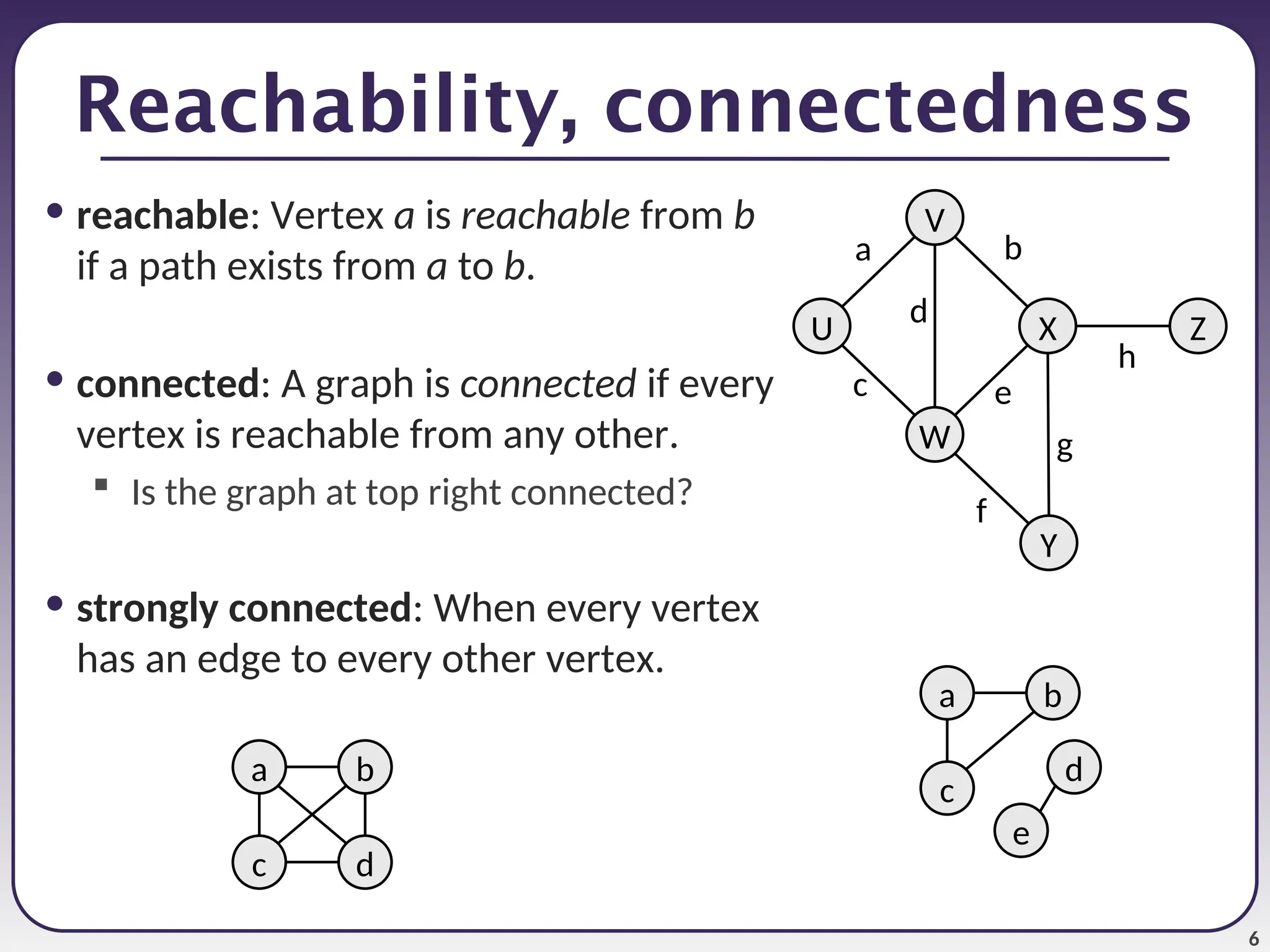
Reachability, connectedness
• reachable:Vertex a is reachable from b
if a path exists from a to b.
• connected: A graph is connected if every
vertex is reachable from any other.
Is the graph at top right connected?
• strongly connected: When every vertex
has an edge to every other vertex.
X
U
V
W
Z
Y
a
c
b
e
d
f
g
h
a
c
b
d
a
c
b
d
e
7.
7
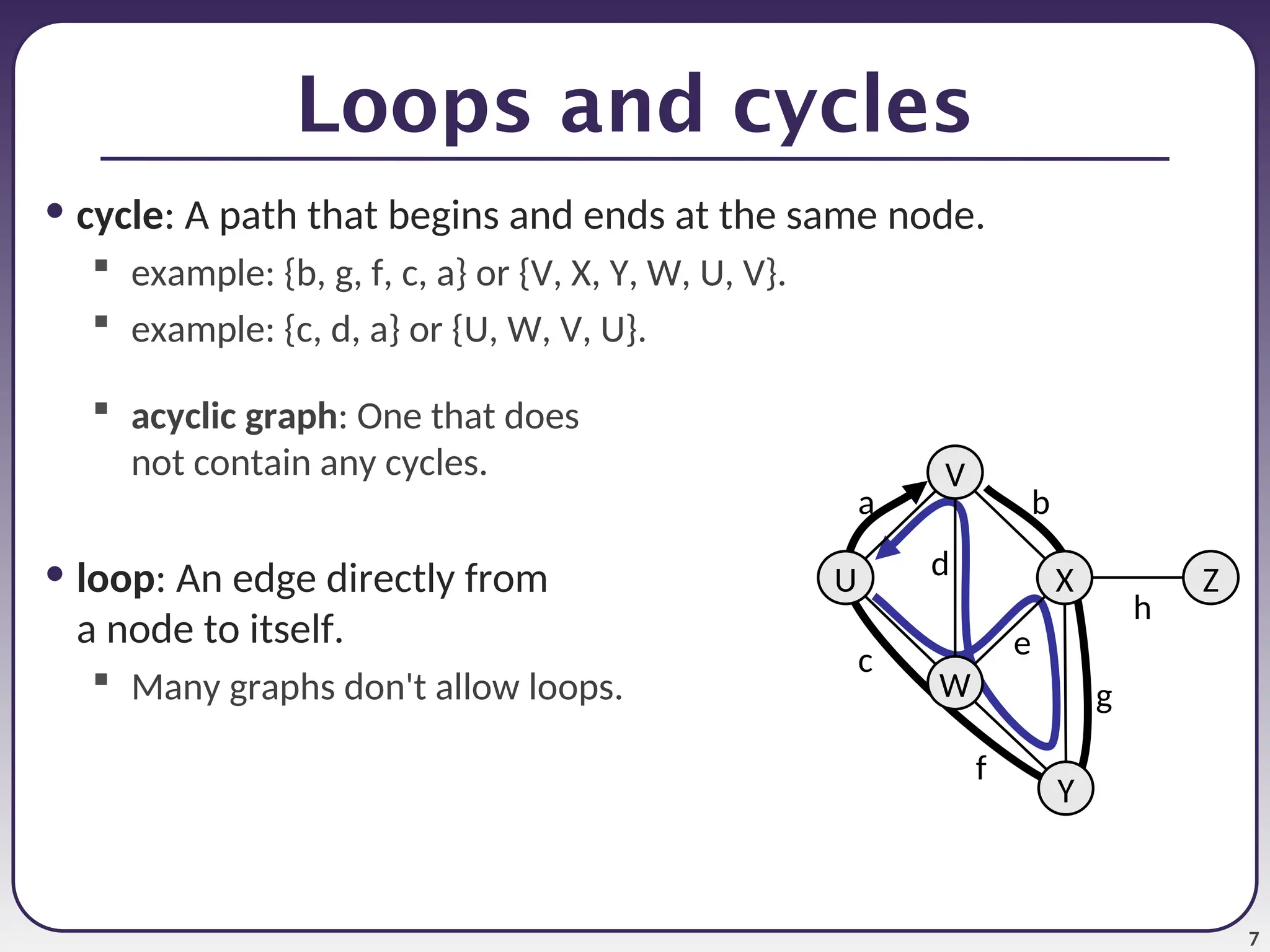
Loops and cycles
•cycle: A path that begins and ends at the same node.
example: {b, g, f, c, a} or {V, X, Y, W, U, V}.
example: {c, d, a} or {U, W, V, U}.
acyclic graph: One that does
not contain any cycles.
• loop: An edge directly from
a node to itself.
Many graphs don't allow loops.
X
U
V
W
Z
Y
a
c
b
e
d
f
g
h
8.
8
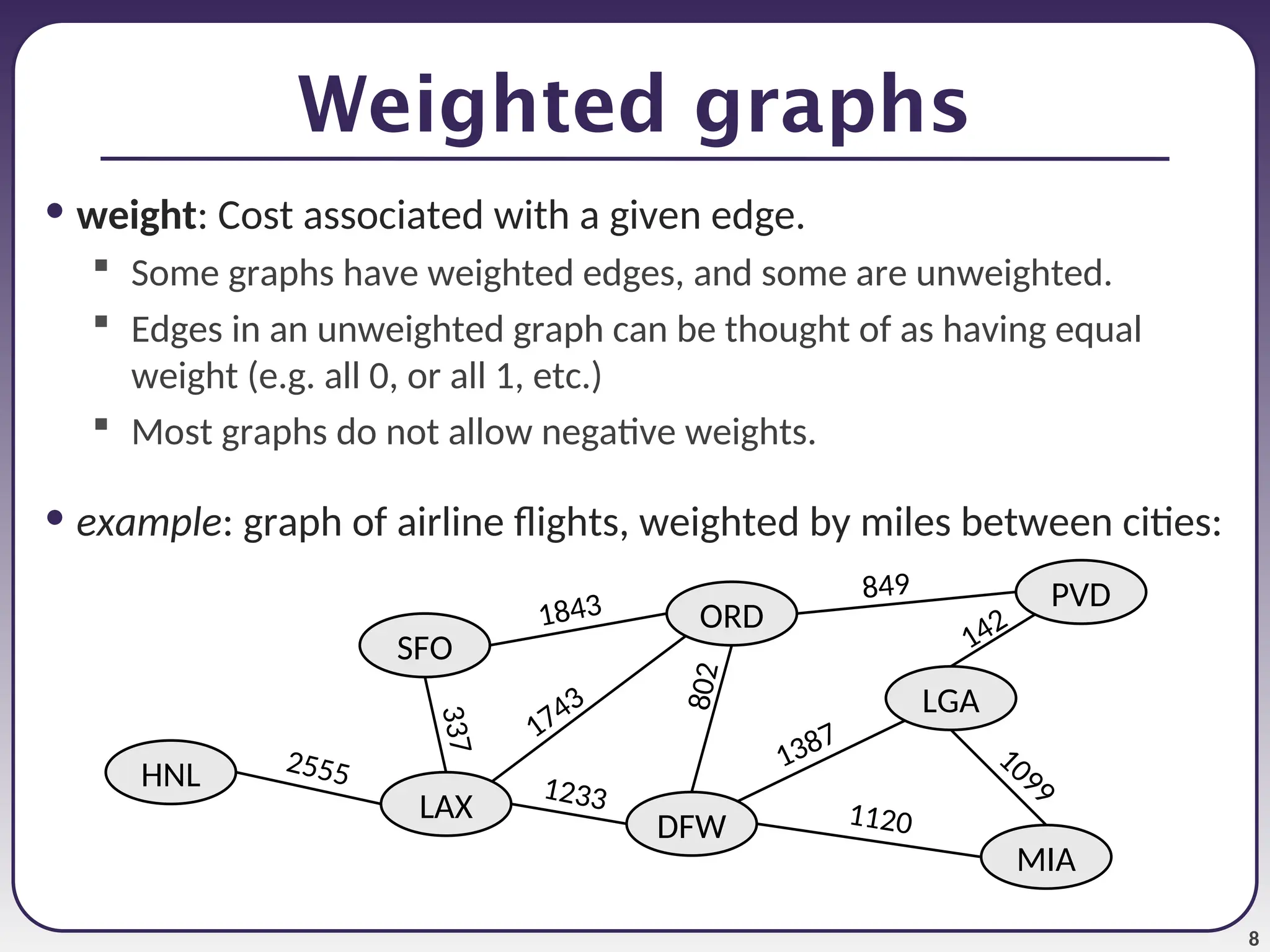
Weighted graphs
• weight:Cost associated with a given edge.
Some graphs have weighted edges, and some are unweighted.
Edges in an unweighted graph can be thought of as having equal
weight (e.g. all 0, or all 1, etc.)
Most graphs do not allow negative weights.
• example: graph of airline flights, weighted by miles between cities:
ORD
PVD
MIA
DFW
SFO
LAX
LGA
HNL
849
8
0
2
1387
1743
1843
1099
1120
1233
3
3
7
2555
142
9.
9
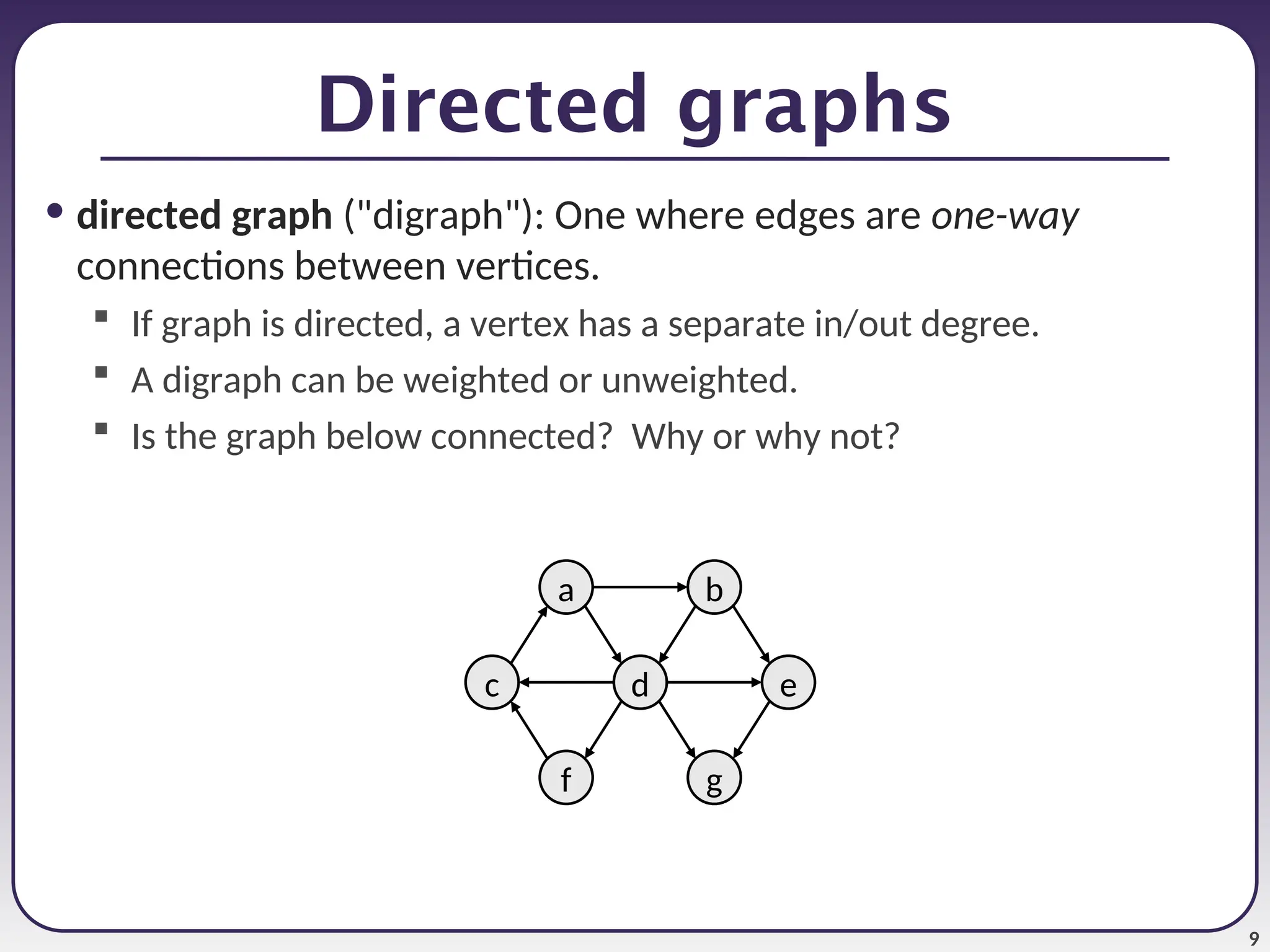
Directed graphs
• directedgraph ("digraph"): One where edges are one-way
connections between vertices.
If graph is directed, a vertex has a separate in/out degree.
A digraph can be weighted or unweighted.
Is the graph below connected? Why or why not?
a
d
b
e
g
f
c
10.
10
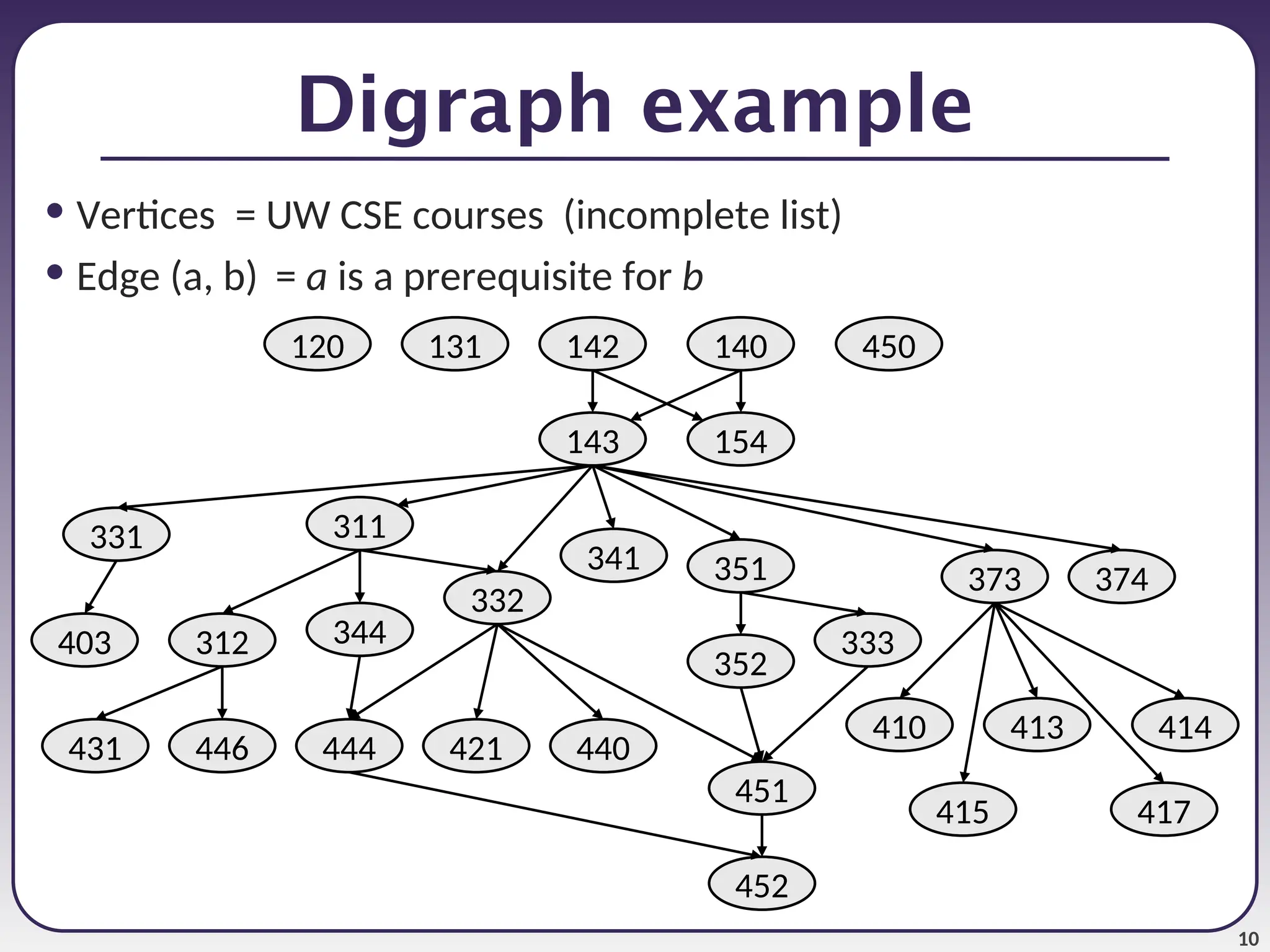
Digraph example
• Vertices= UW CSE courses (incomplete list)
• Edge (a, b) = a is a prerequisite for b
142
143 154
140
311
312
331
351
333
341
344
403
352
373
120
410
332
374
131
421
431 440
415
413
417
414
444
446
450
451
452
11.
11
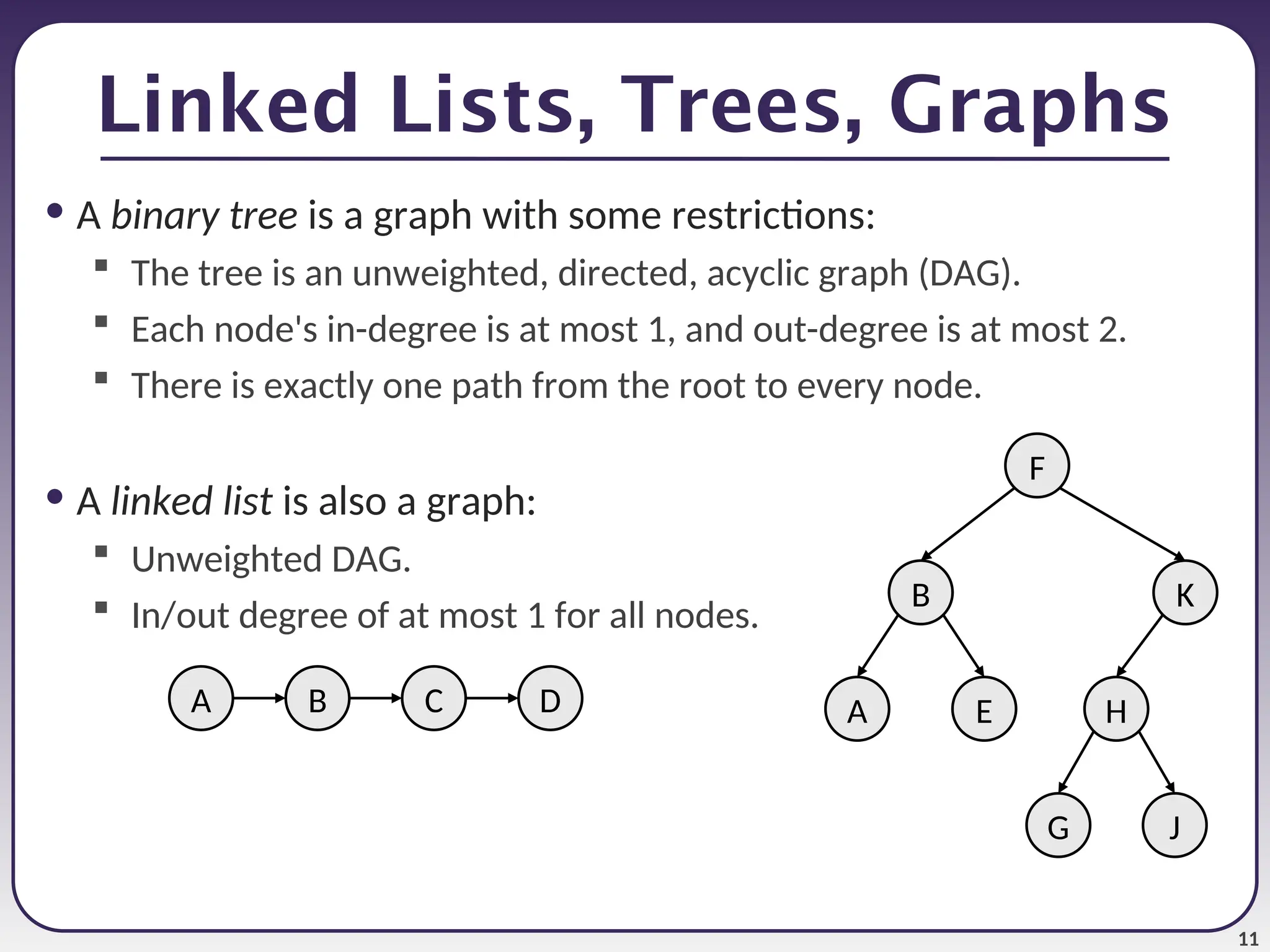
Linked Lists, Trees,Graphs
• A binary tree is a graph with some restrictions:
The tree is an unweighted, directed, acyclic graph (DAG).
Each node's in-degree is at most 1, and out-degree is at most 2.
There is exactly one path from the root to every node.
• A linked list is also a graph:
Unweighted DAG.
In/out degree of at most 1 for all nodes.
F
B
A E
K
H
J
G
A B D
C
12.
12
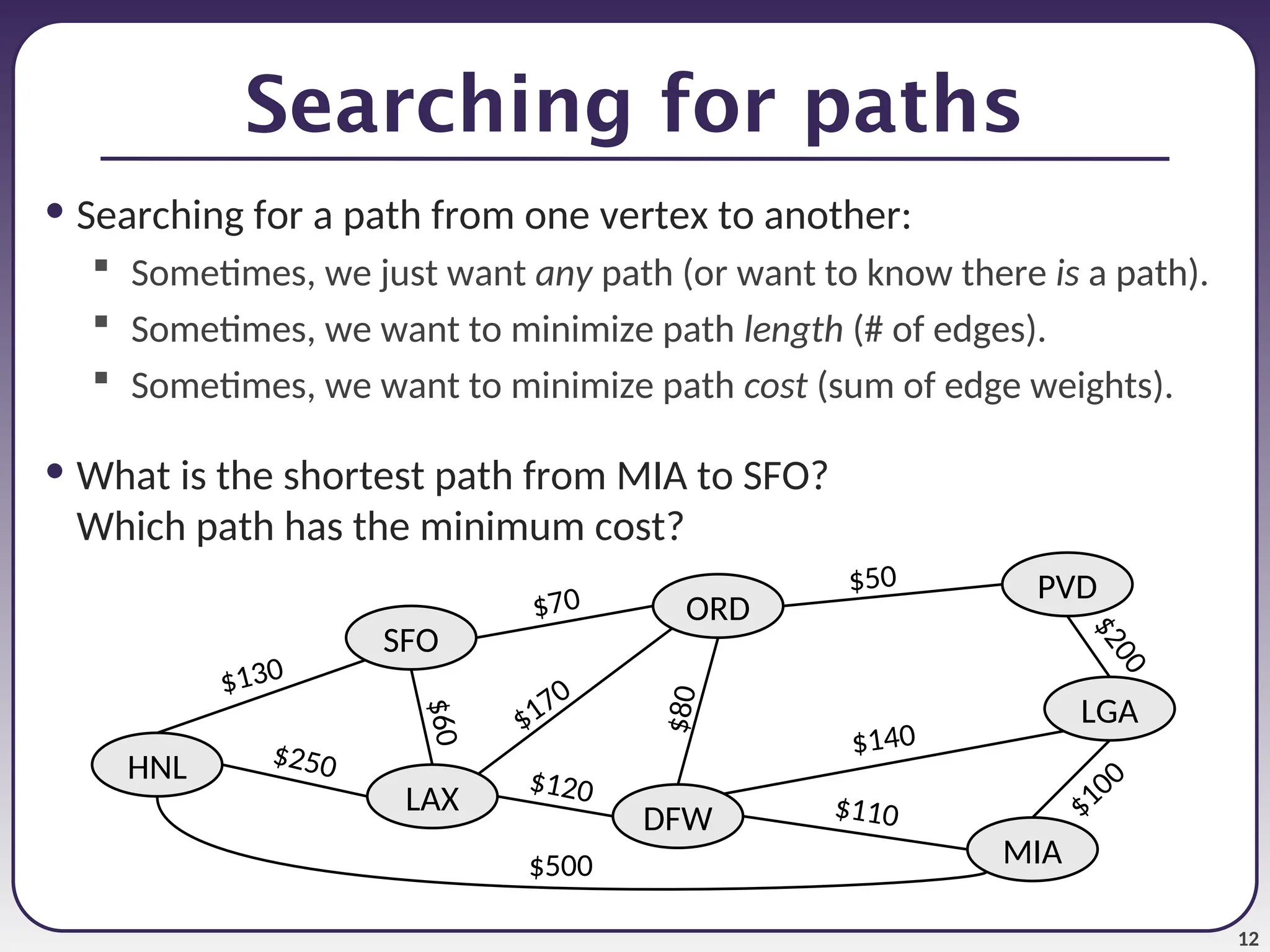
Searching for paths
•Searching for a path from one vertex to another:
Sometimes, we just want any path (or want to know there is a path).
Sometimes, we want to minimize path length (# of edges).
Sometimes, we want to minimize path cost (sum of edge weights).
• What is the shortest path from MIA to SFO?
Which path has the minimum cost?
ORD
PVD
MIA
DFW
SFO
LAX
LGA
HNL
$50
$
8
0
$140
$170
$70
$100
$110
$120
$
6
0
$250
$
2
0
0
$500
$130
13.
13
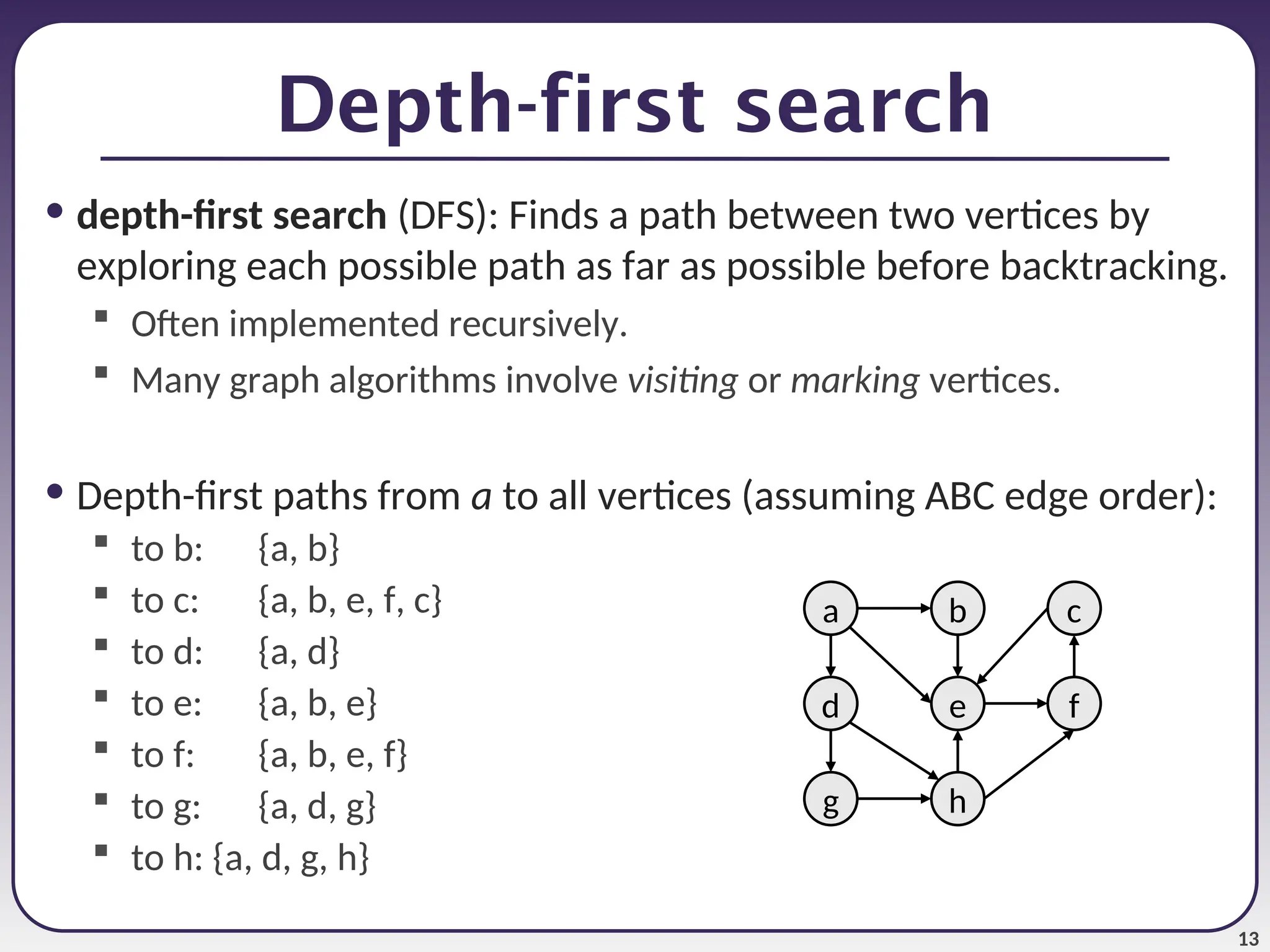
Depth-first search
• depth-firstsearch (DFS): Finds a path between two vertices by
exploring each possible path as far as possible before backtracking.
Often implemented recursively.
Many graph algorithms involve visiting or marking vertices.
• Depth-first paths from a to all vertices (assuming ABC edge order):
to b: {a, b}
to c: {a, b, e, f, c}
to d: {a, d}
to e: {a, b, e}
to f: {a, b, e, f}
to g: {a, d, g}
to h: {a, d, g, h}
a
e
b c
h
g
d f
14.
14
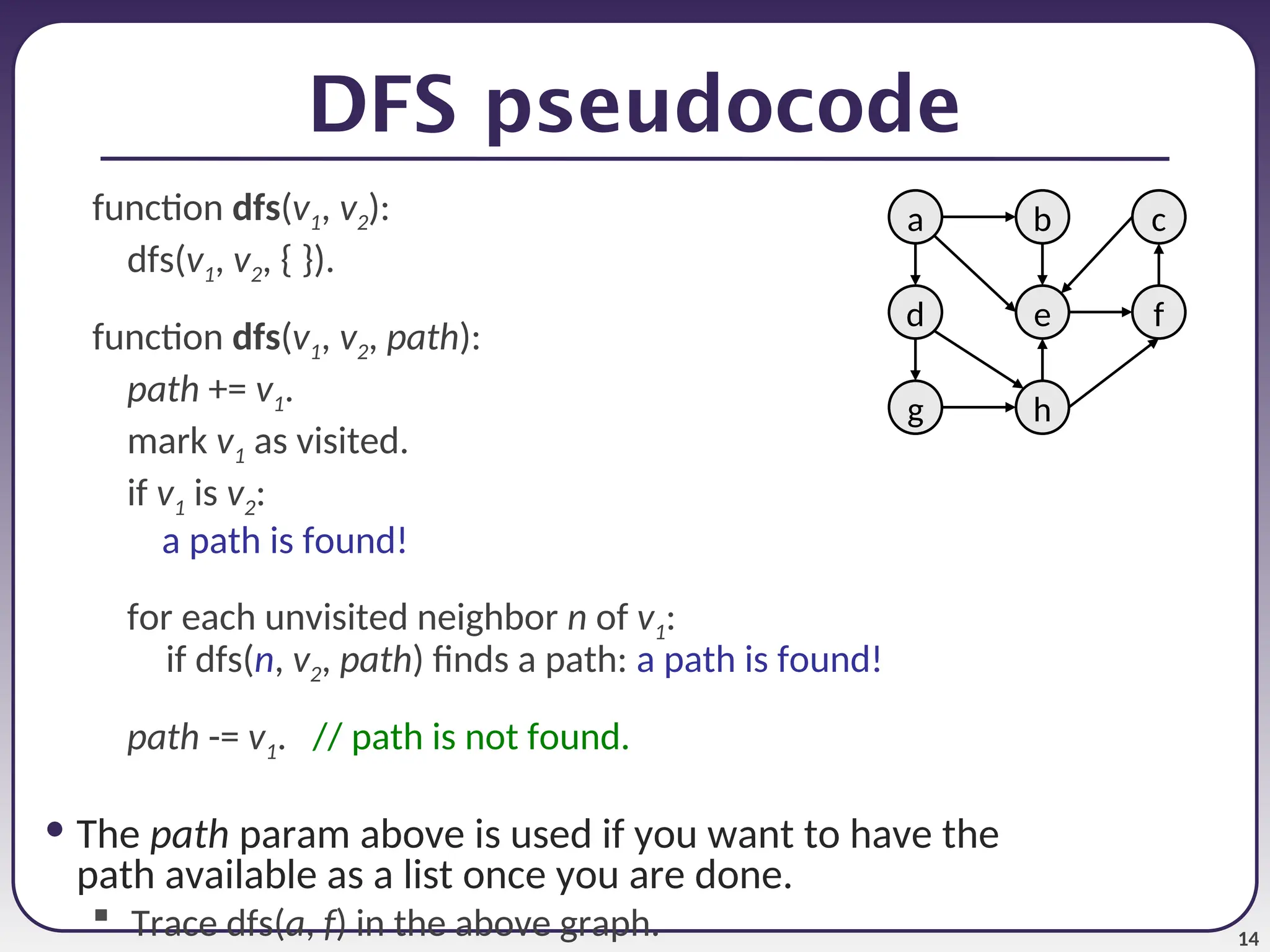
DFS pseudocode
function dfs(v1,v2):
dfs(v1, v2, { }).
function dfs(v1, v2, path):
path += v1.
mark v1 as visited.
if v1 is v2:
a path is found!
for each unvisited neighbor n of v1:
if dfs(n, v2, path) finds a path: a path is found!
path -= v1. // path is not found.
• The path param above is used if you want to have the
path available as a list once you are done.
Trace dfs(a, f) in the above graph.
a
e
b c
h
g
d f
15.
15
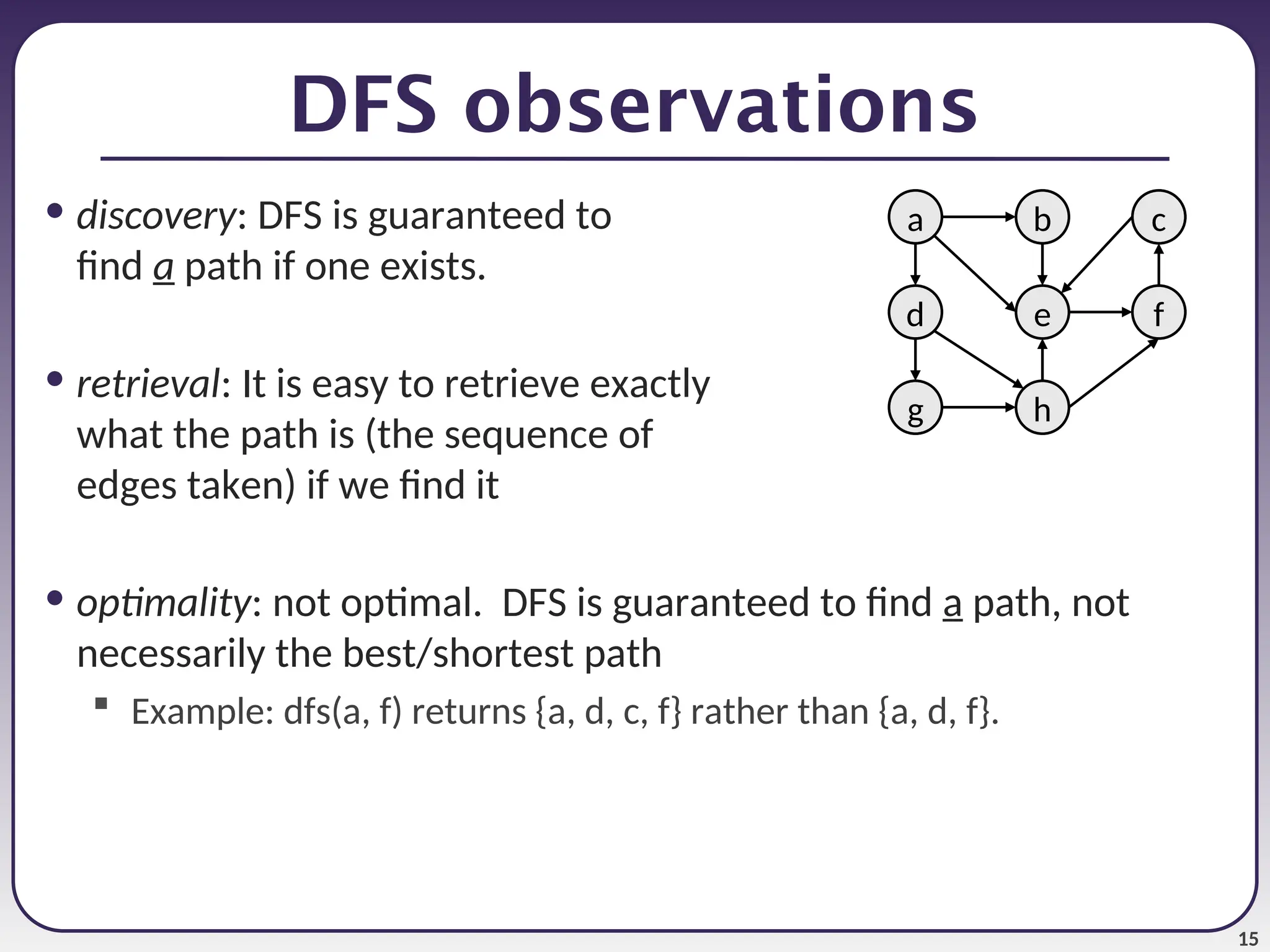
DFS observations
• discovery:DFS is guaranteed to
find a path if one exists.
• retrieval: It is easy to retrieve exactly
what the path is (the sequence of
edges taken) if we find it
• optimality: not optimal. DFS is guaranteed to find a path, not
necessarily the best/shortest path
Example: dfs(a, f) returns {a, d, c, f} rather than {a, d, f}.
a
e
b c
h
g
d f
16.
16
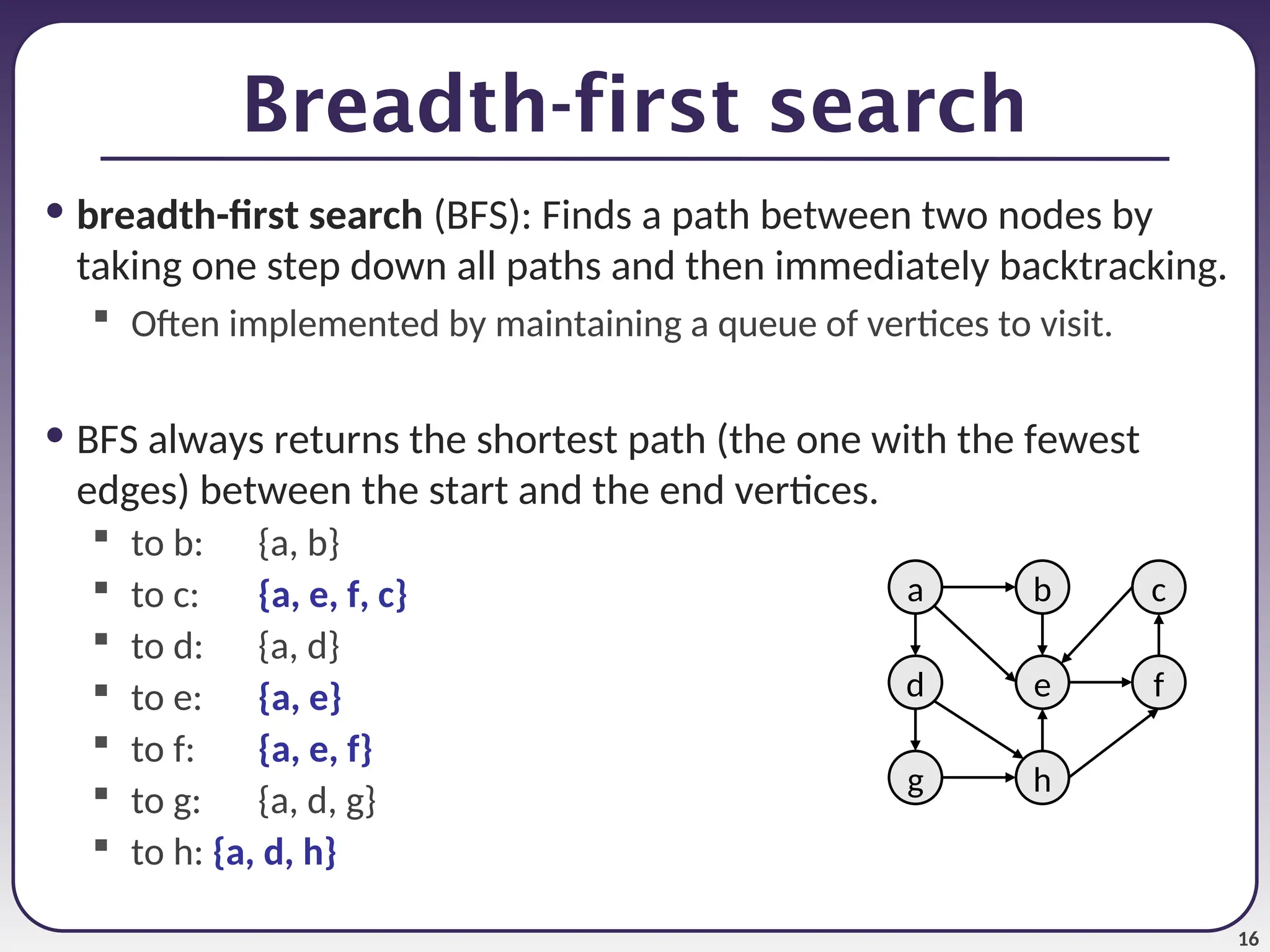
Breadth-first search
• breadth-firstsearch (BFS): Finds a path between two nodes by
taking one step down all paths and then immediately backtracking.
Often implemented by maintaining a queue of vertices to visit.
• BFS always returns the shortest path (the one with the fewest
edges) between the start and the end vertices.
to b: {a, b}
to c: {a, e, f, c}
to d: {a, d}
to e: {a, e}
to f: {a, e, f}
to g: {a, d, g}
to h: {a, d, h}
a
e
b c
h
g
d f
17.
17
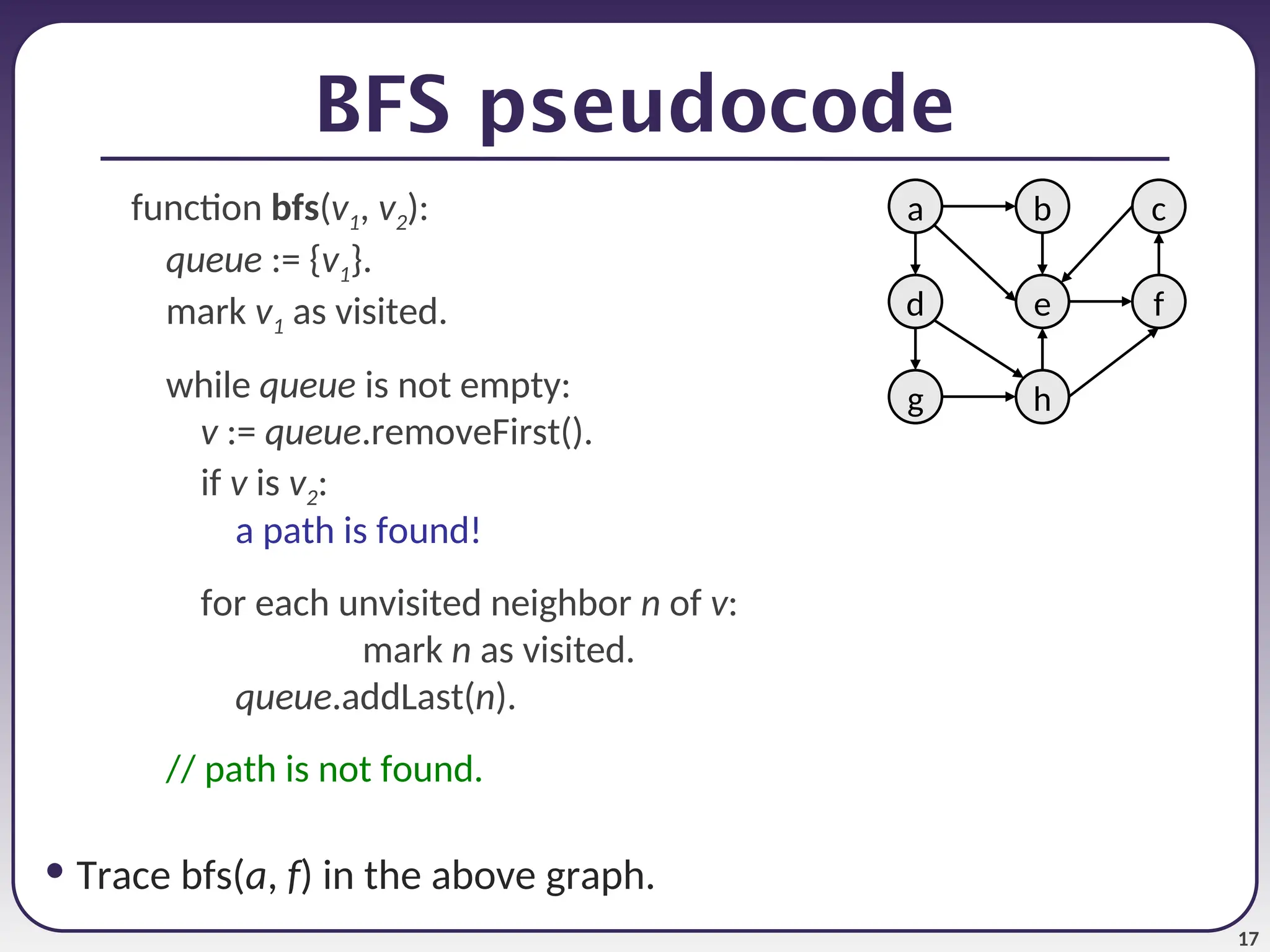
BFS pseudocode
function bfs(v1,v2):
queue := {v1}.
mark v1 as visited.
while queue is not empty:
v := queue.removeFirst().
if v is v2:
a path is found!
for each unvisited neighbor n of v:
mark n as visited.
queue.addLast(n).
// path is not found.
• Trace bfs(a, f) in the above graph.
a
e
b c
h
g
d f
18.
18
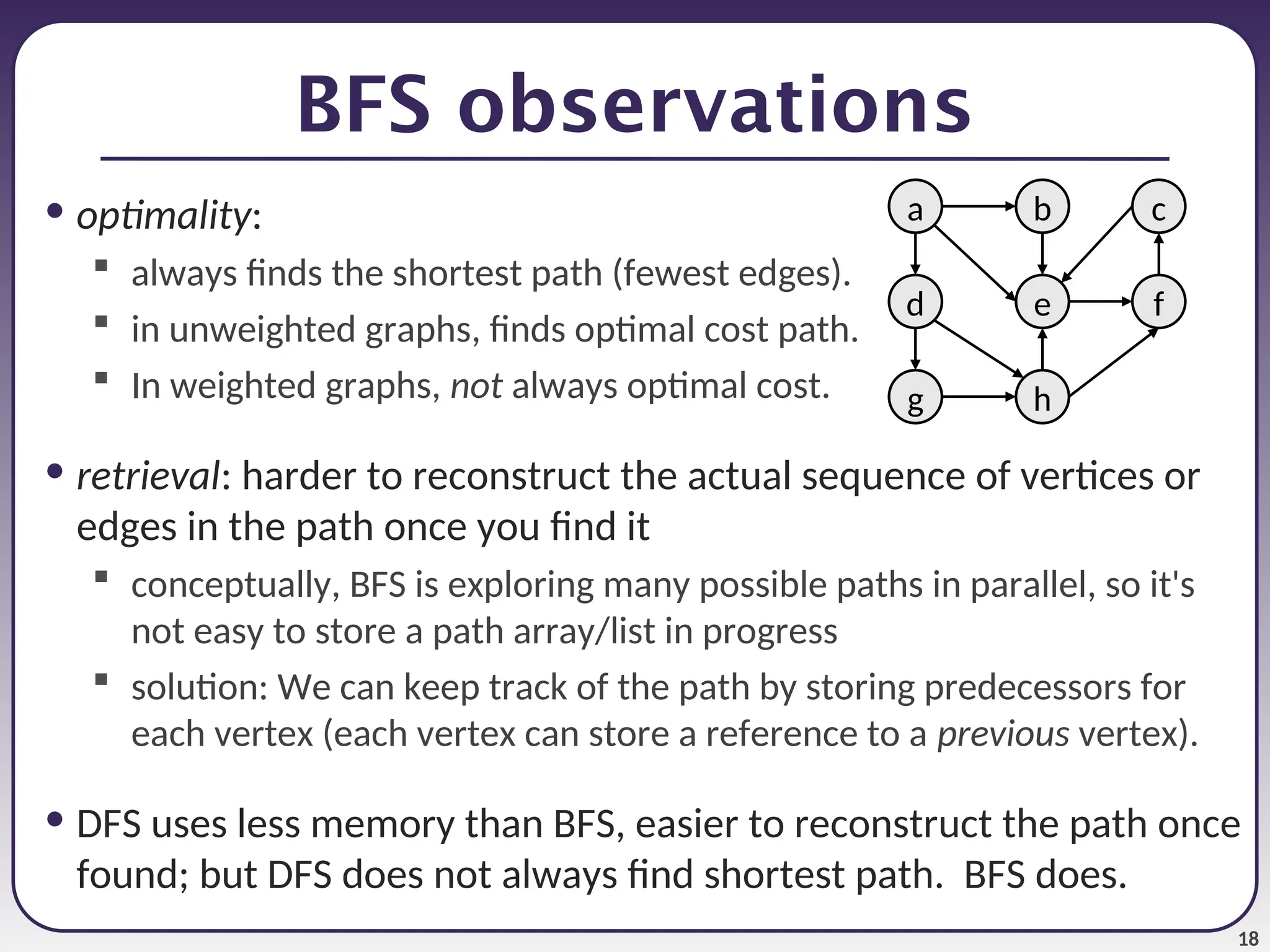
BFS observations
• optimality:
always finds the shortest path (fewest edges).
in unweighted graphs, finds optimal cost path.
In weighted graphs, not always optimal cost.
• retrieval: harder to reconstruct the actual sequence of vertices or
edges in the path once you find it
conceptually, BFS is exploring many possible paths in parallel, so it's
not easy to store a path array/list in progress
solution: We can keep track of the path by storing predecessors for
each vertex (each vertex can store a reference to a previous vertex).
• DFS uses less memory than BFS, easier to reconstruct the path once
found; but DFS does not always find shortest path. BFS does.
a
e
b c
h
g
d f
19.
19
DFS, BFS runtime
•What is the expected runtime of DFS and BFS, in terms of the
number of vertices V and the number of edges E ?
• Answer: O(|V| + |E|)
where |V| = number of vertices, |E| = number of edges
Must potentially visit every node and/or examine every edge once.
why not O(|V| * |E|) ?
• What is the space complexity of each algorithm?
(How much memory does each algorithm require?)
20.
20
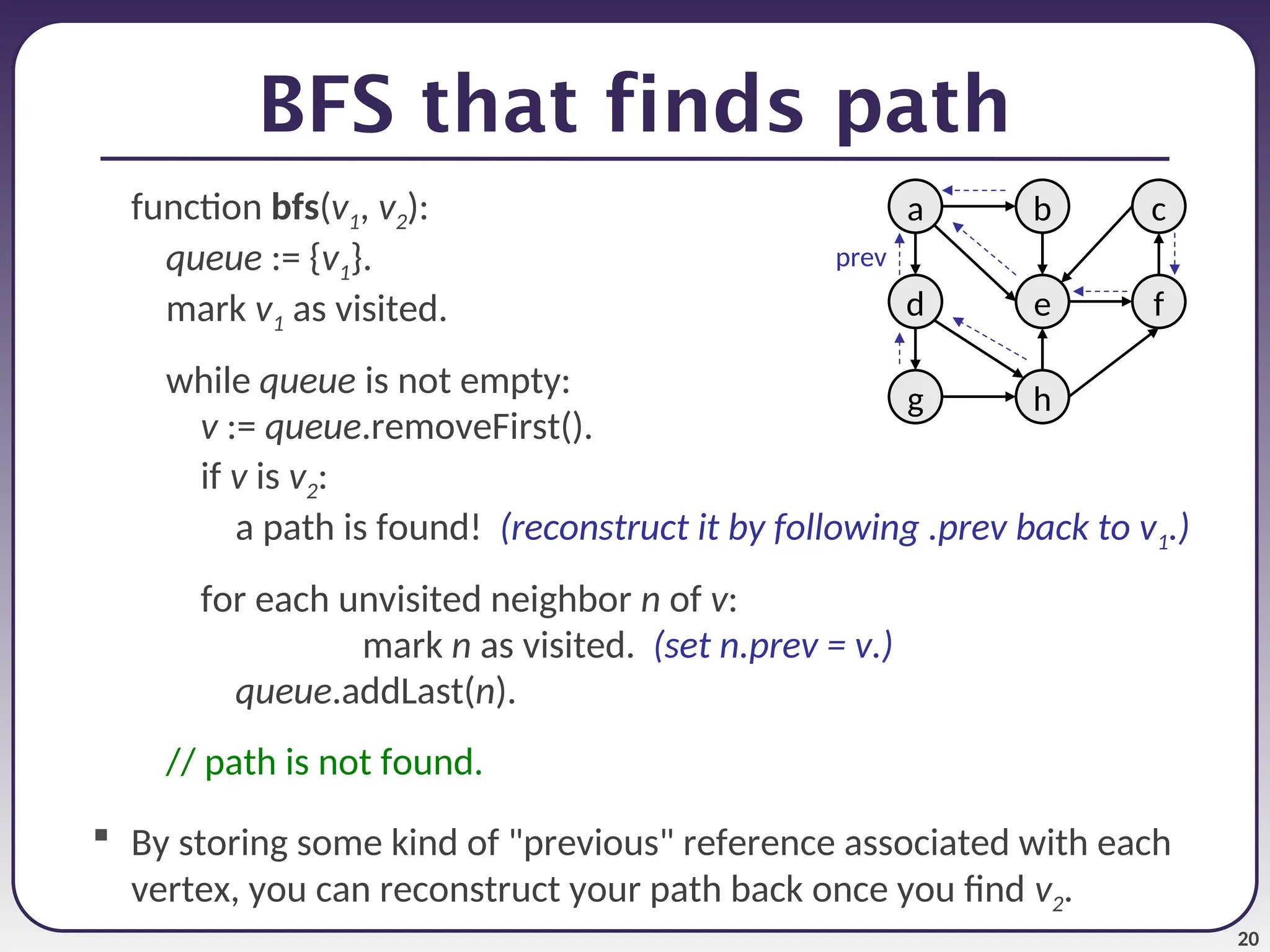
BFS that findspath
function bfs(v1, v2):
queue := {v1}.
mark v1 as visited.
while queue is not empty:
v := queue.removeFirst().
if v is v2:
a path is found! (reconstruct it by following .prev back to v1.)
for each unvisited neighbor n of v:
mark n as visited. (set n.prev = v.)
queue.addLast(n).
// path is not found.
By storing some kind of "previous" reference associated with each
vertex, you can reconstruct your path back once you find v2.
a
e
b c
h
g
d f
prev




























![Data Structures - Lecture 10 [Graphs]](https://cdn.slidesharecdn.com/ss_thumbnails/datastructures-lecture10graphs-150305004608-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)