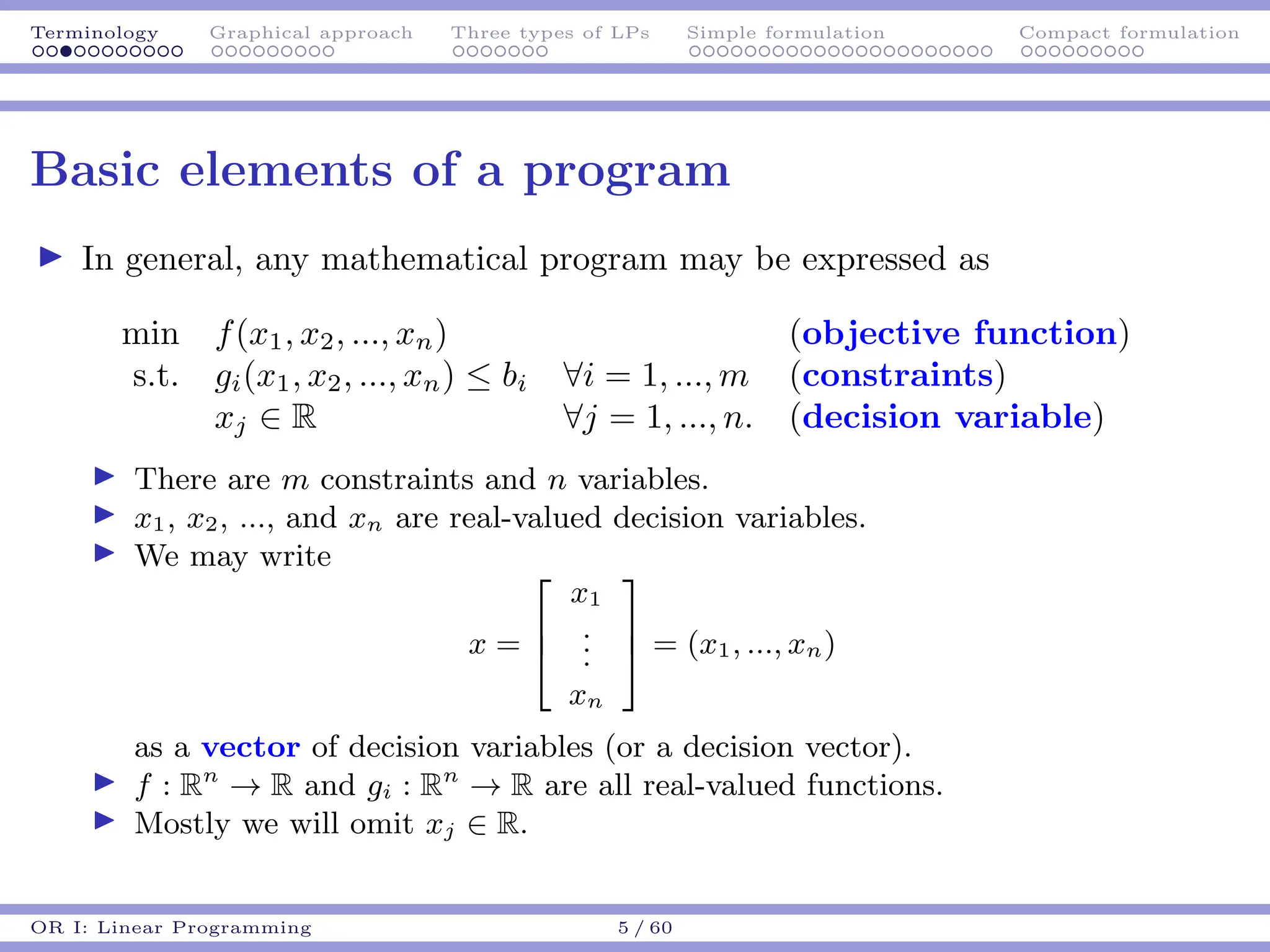
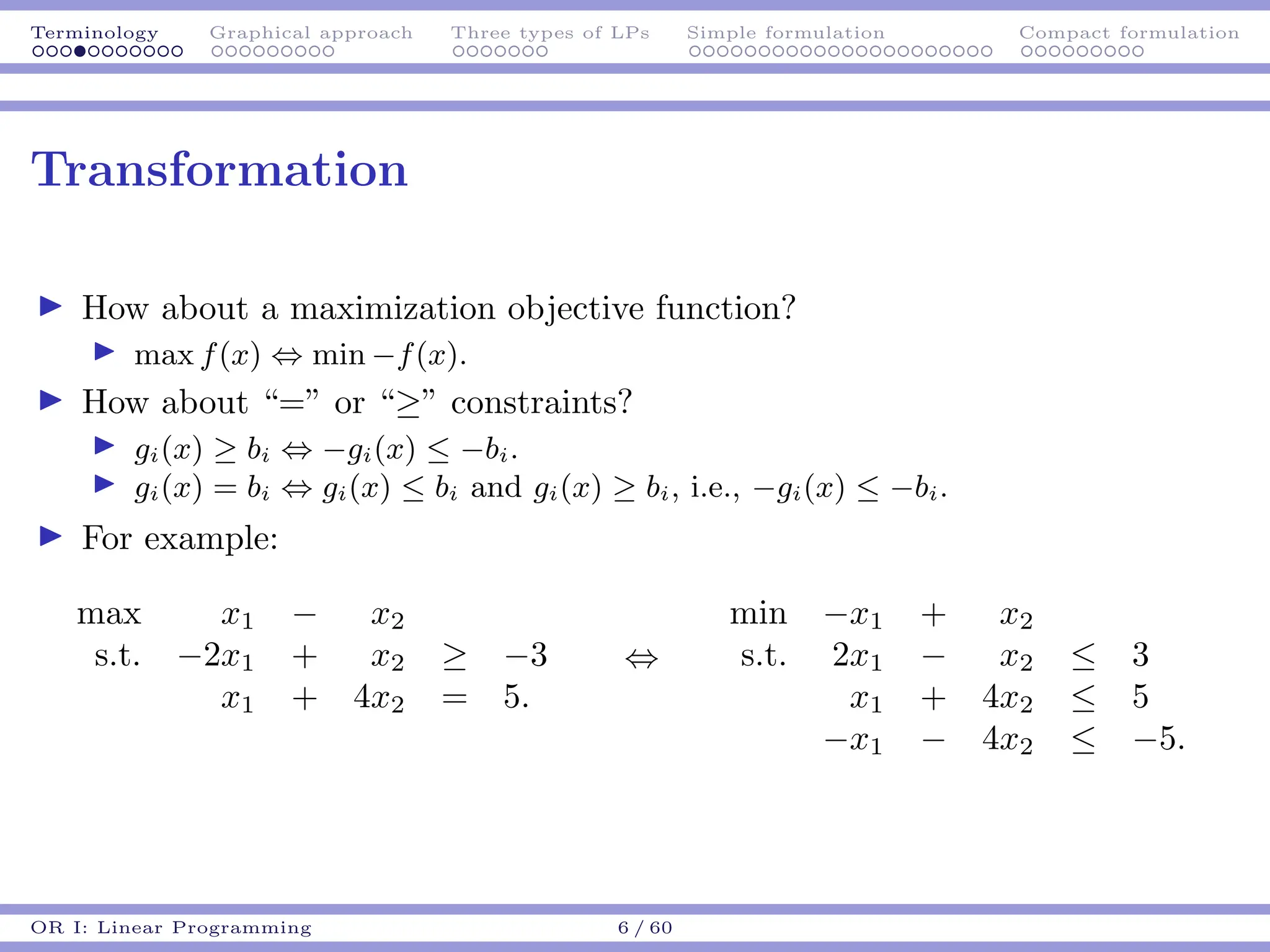
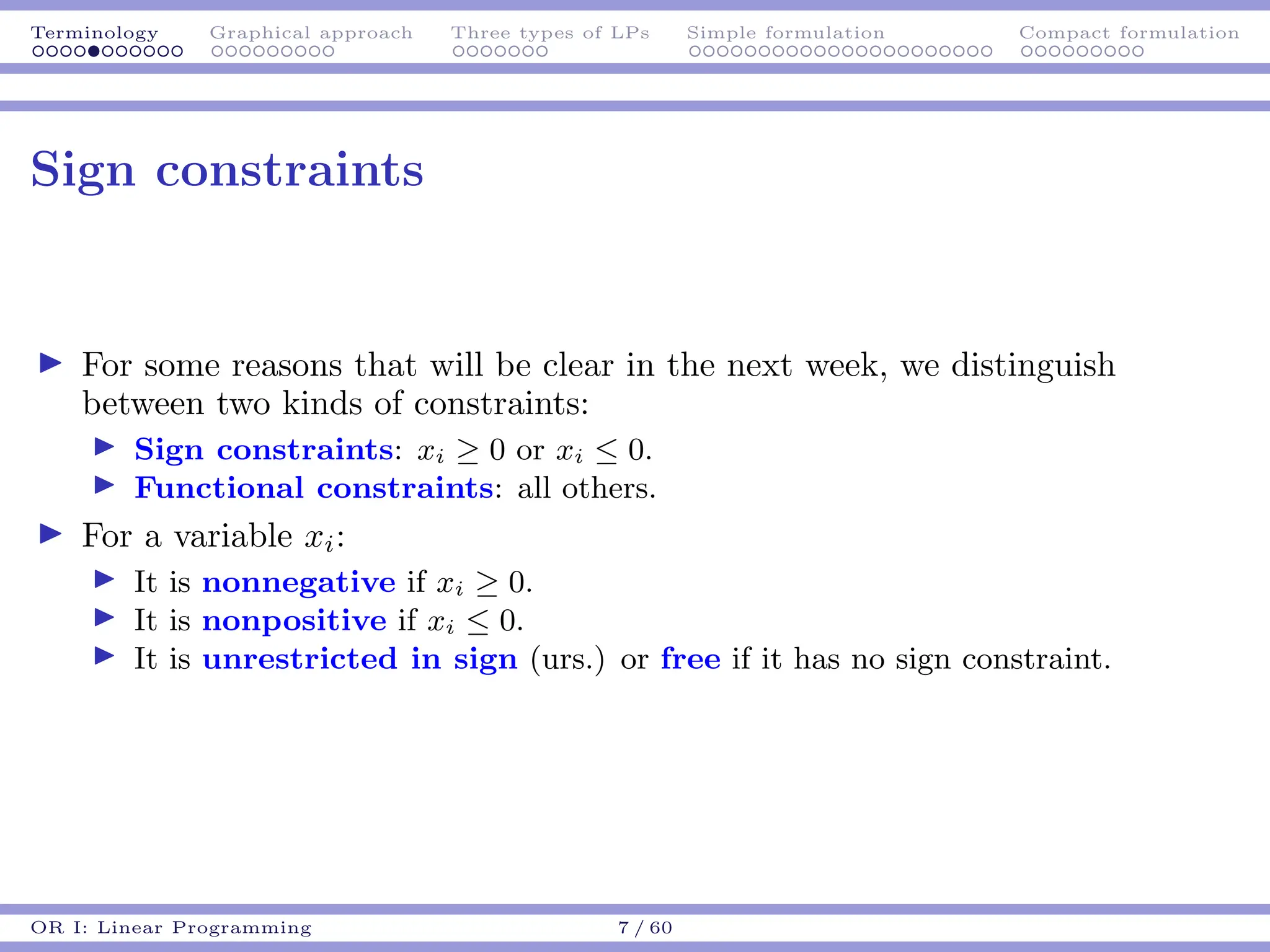
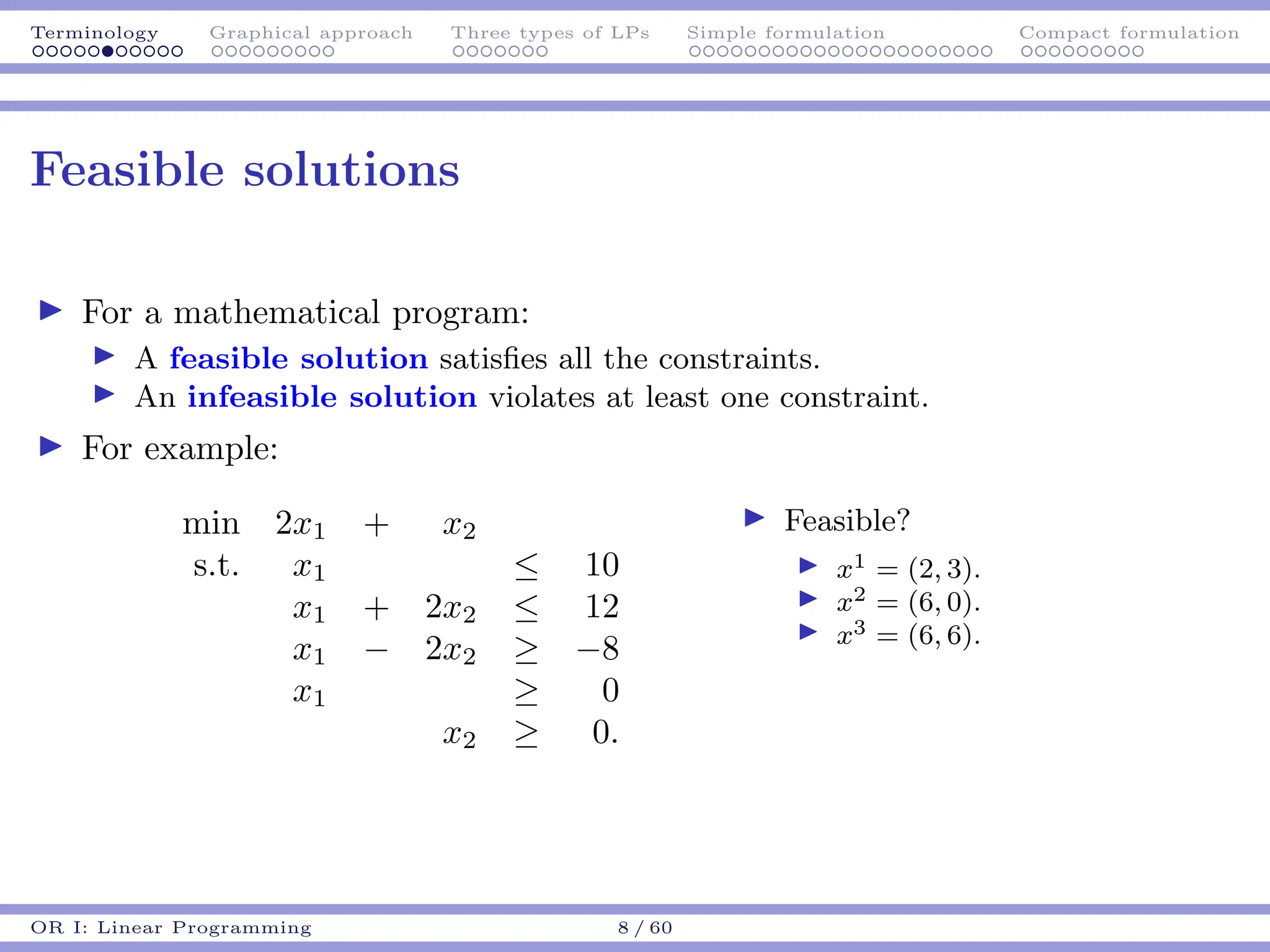
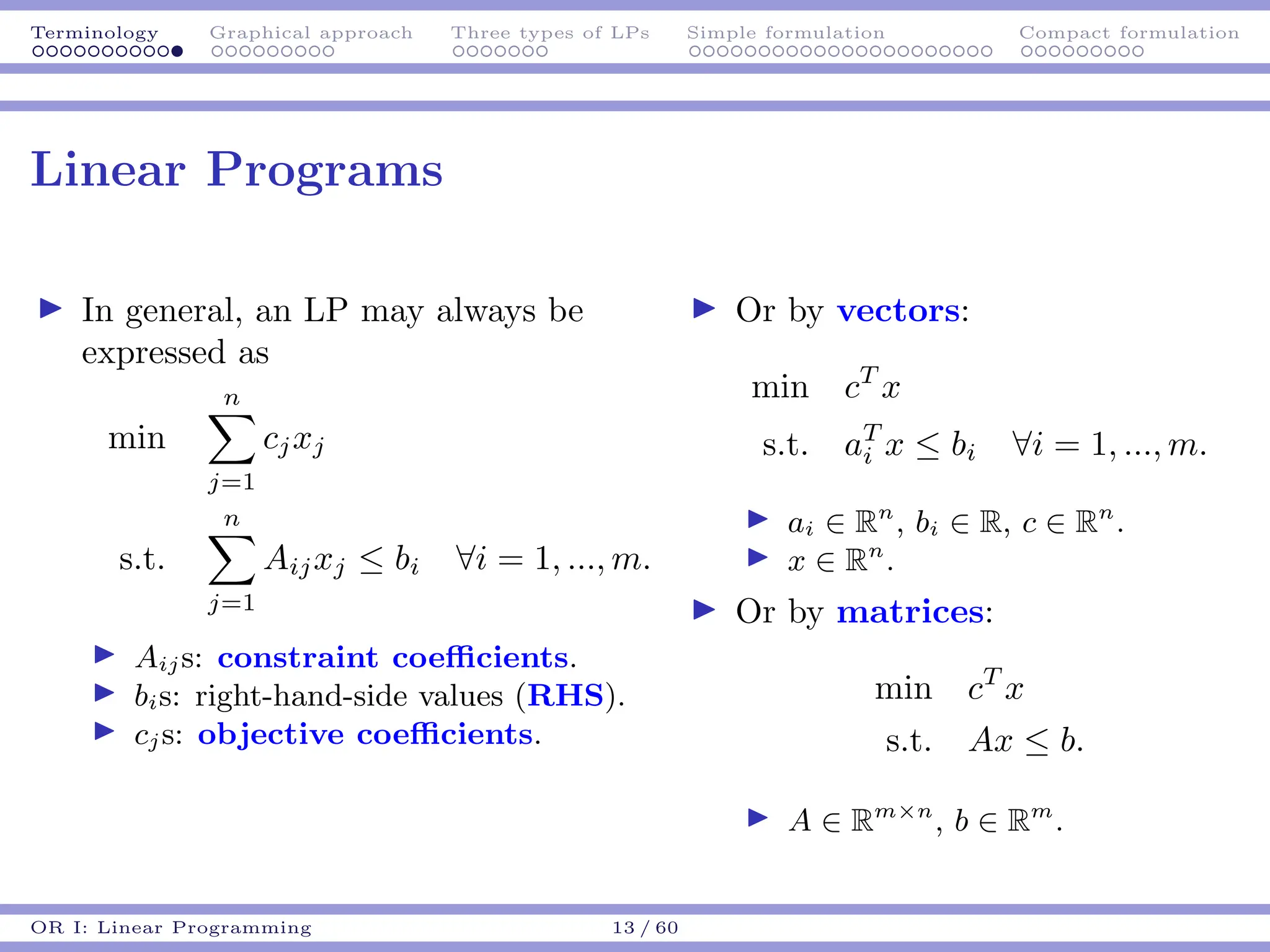
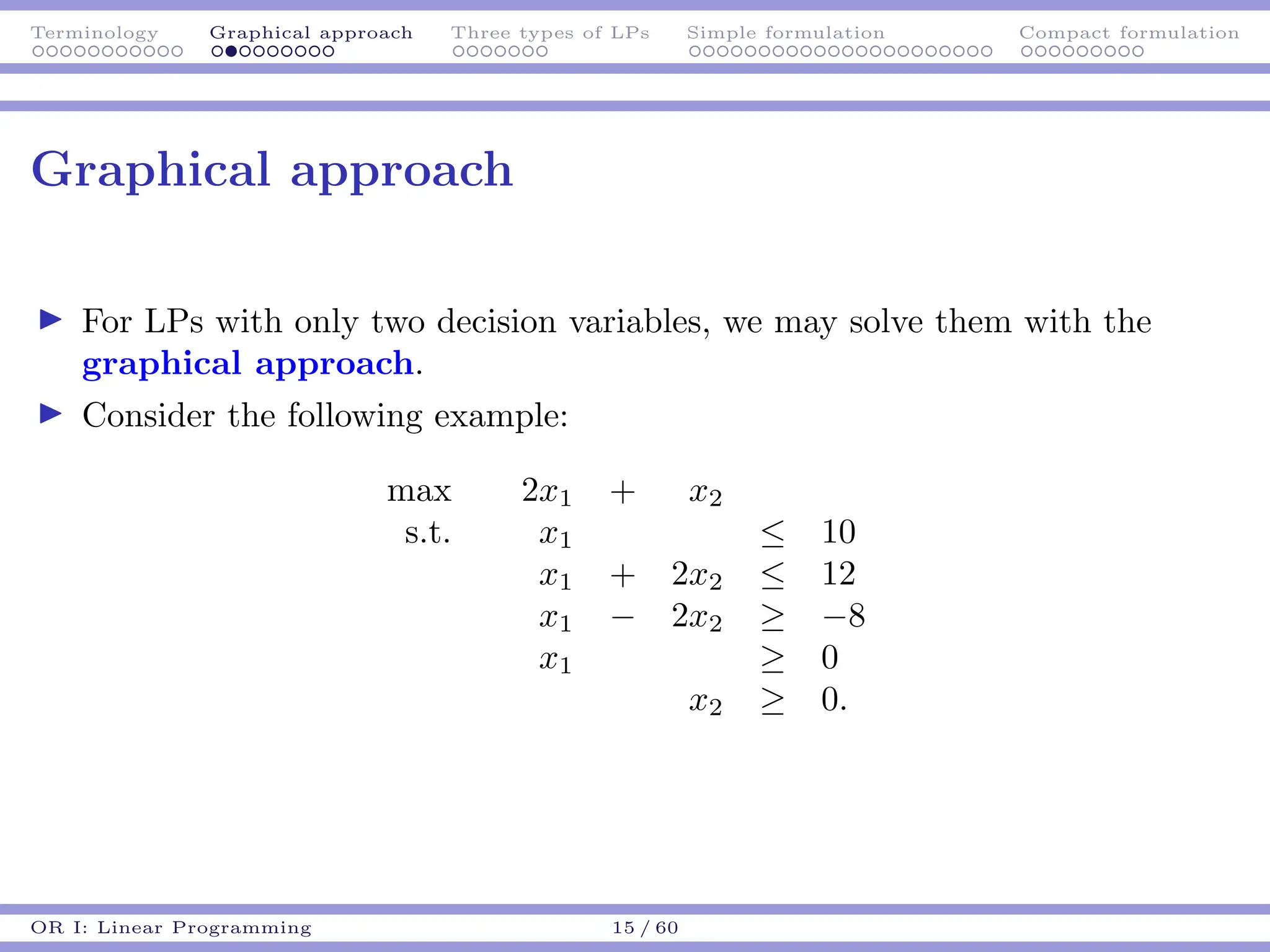
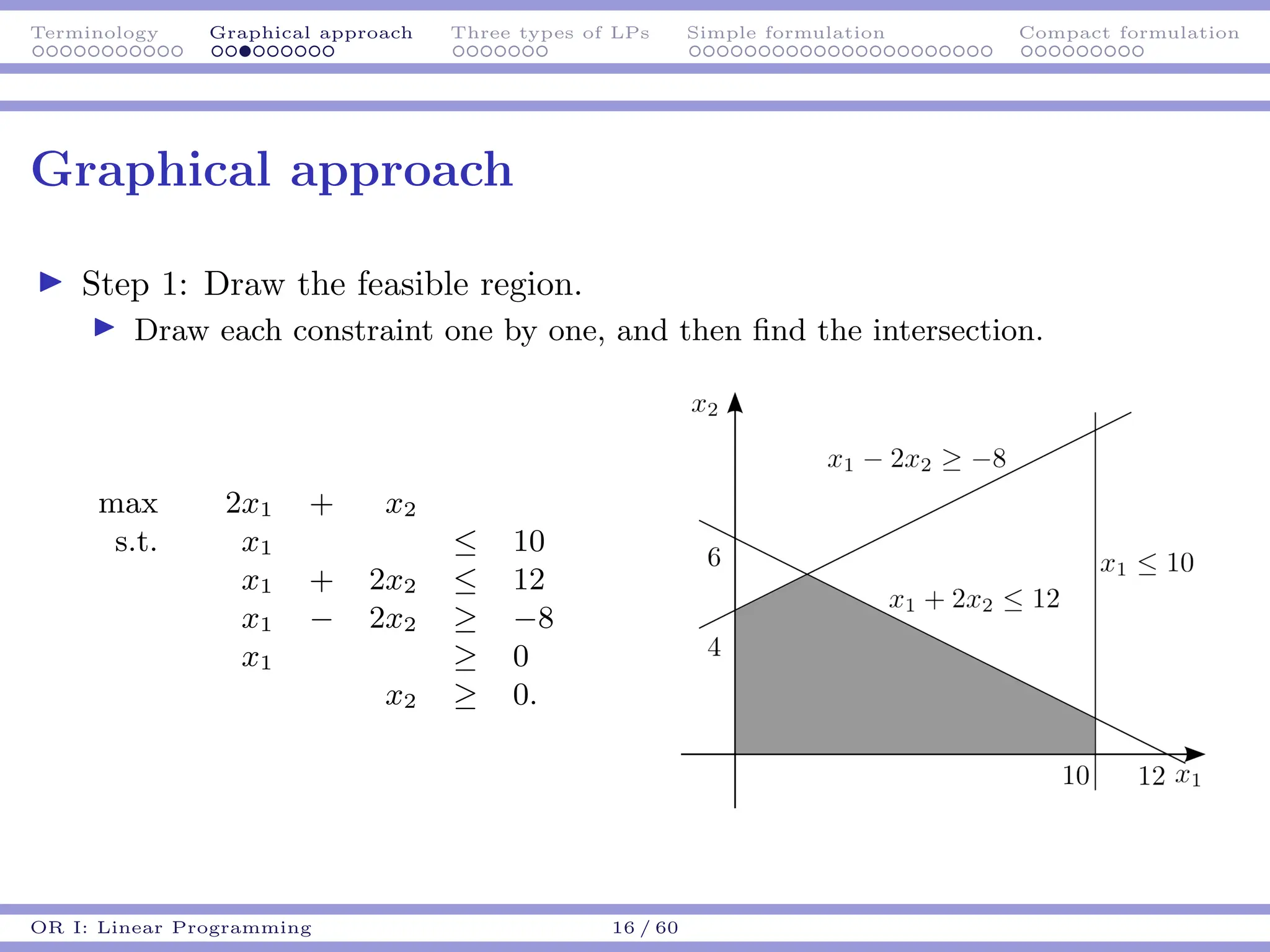
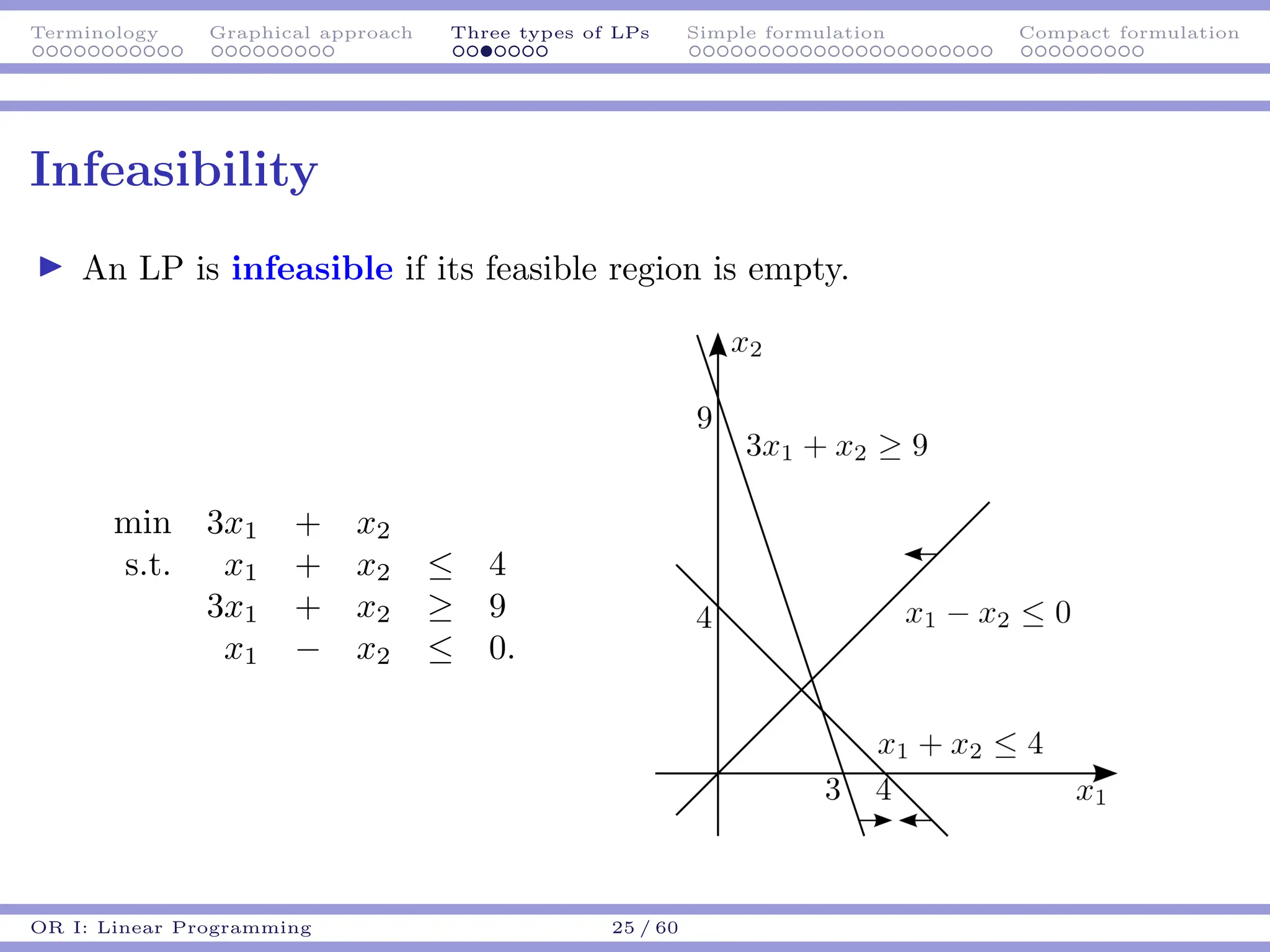
The document introduces linear programming (LP) as a method to formulate and solve various mathematical programs characterized by specific properties. It explains concepts such as objective functions, constraints, feasible solutions, and discusses the graphical approach to solving LP problems, mainly focusing on how to model practical problems and formulate them effectively. Additionally, it highlights the types of LPs (infeasible, unbounded, and finitely optimal) and emphasizes the importance of finding an optimal solution in practice.
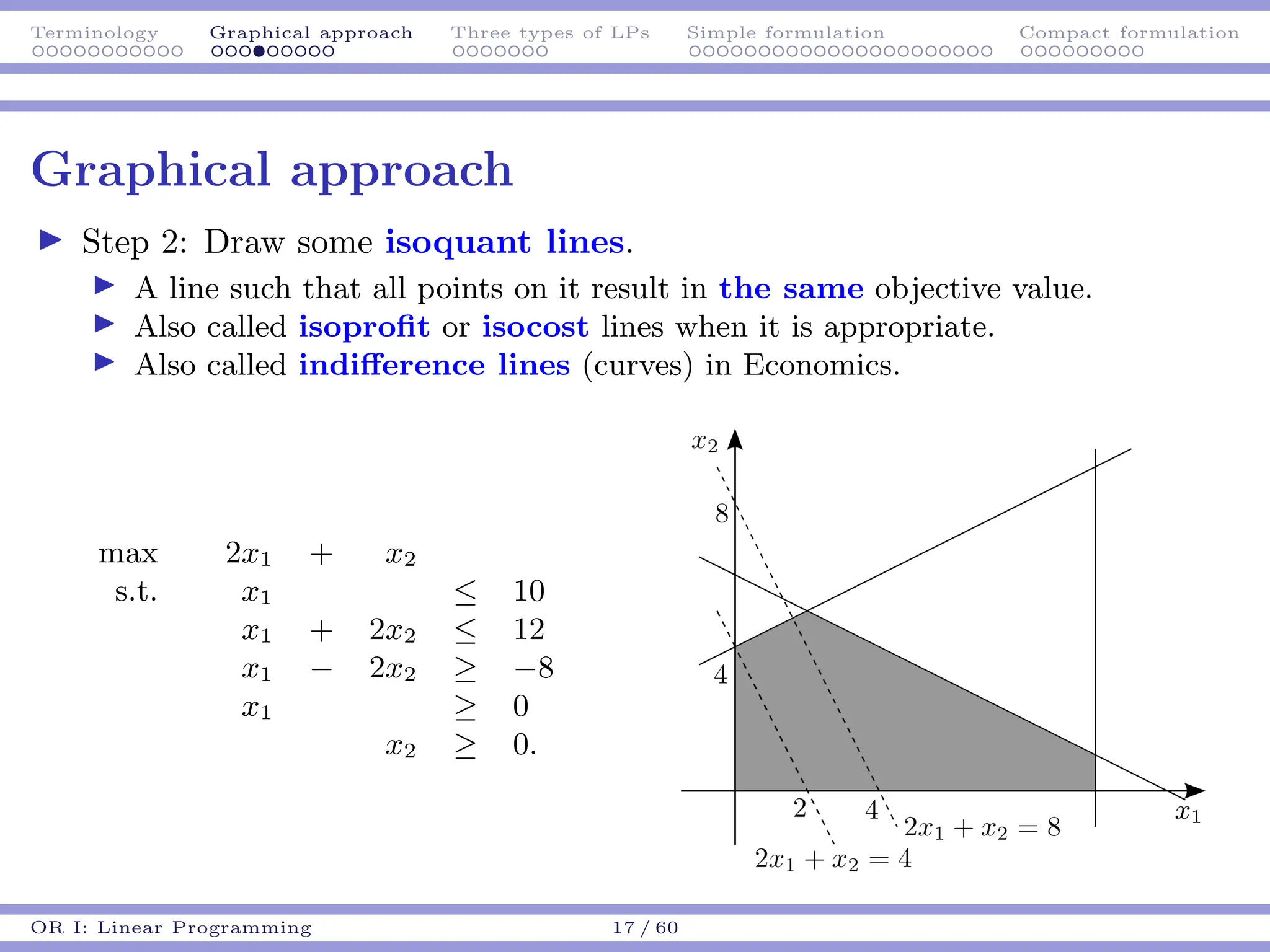

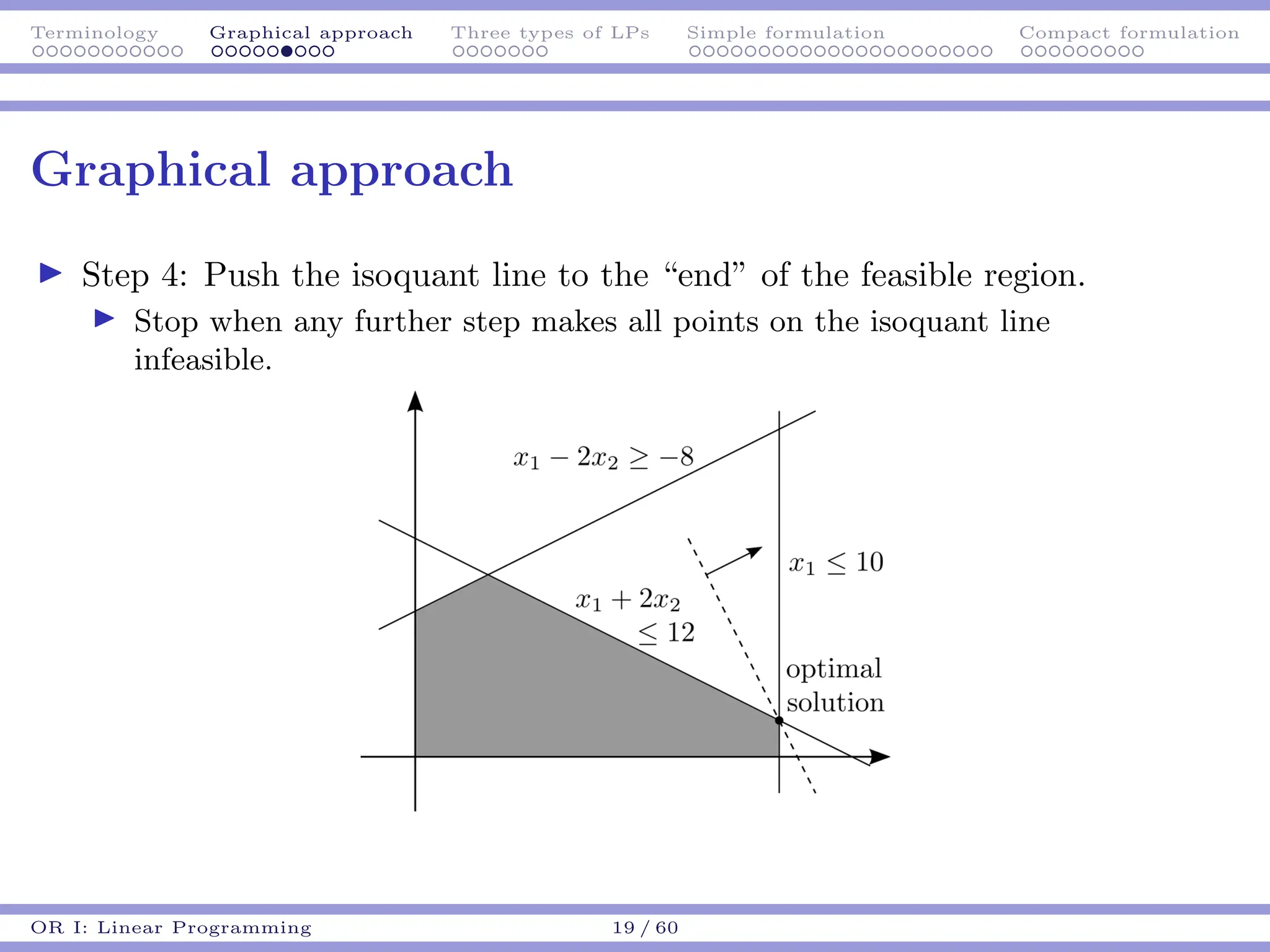
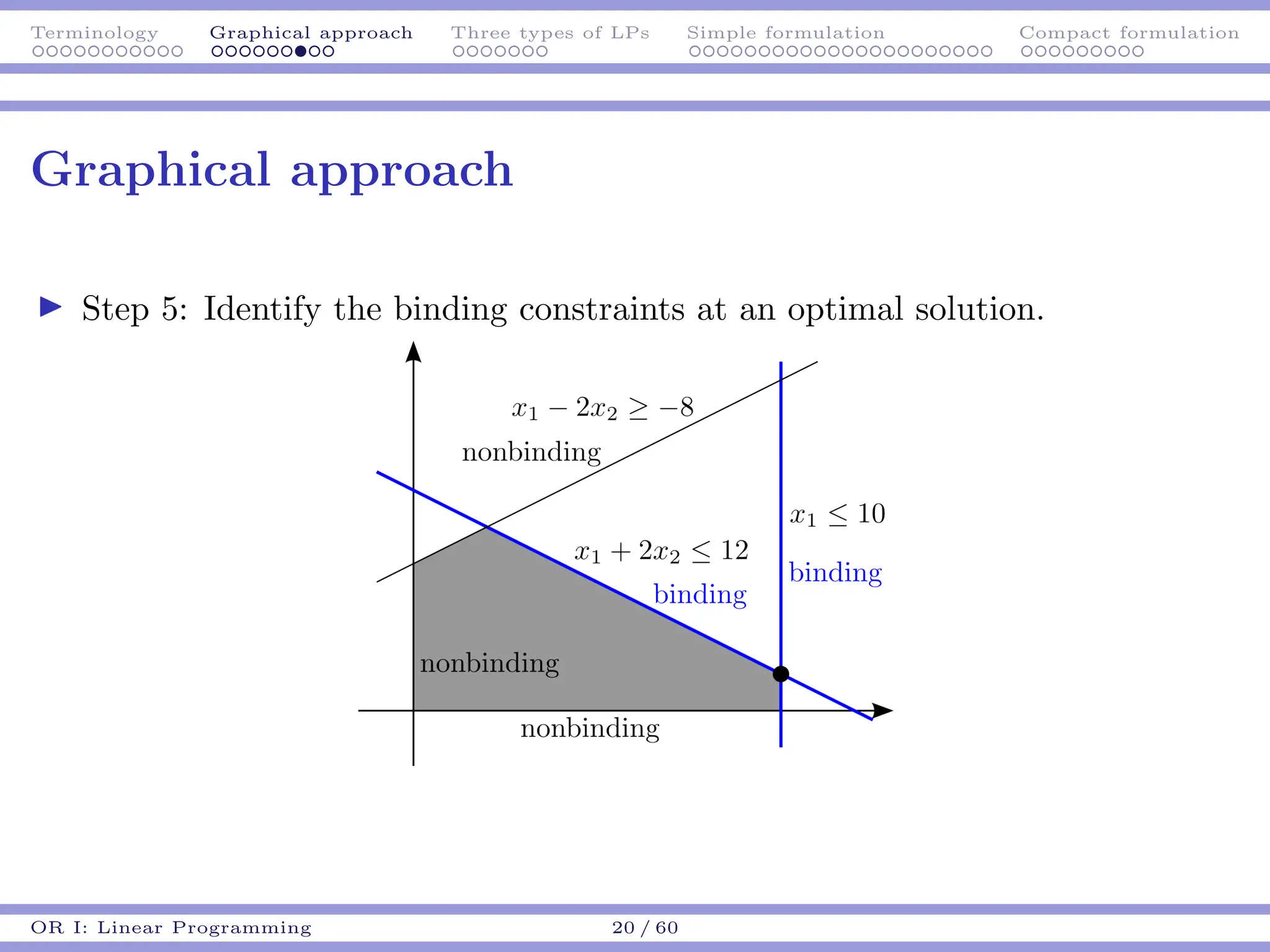
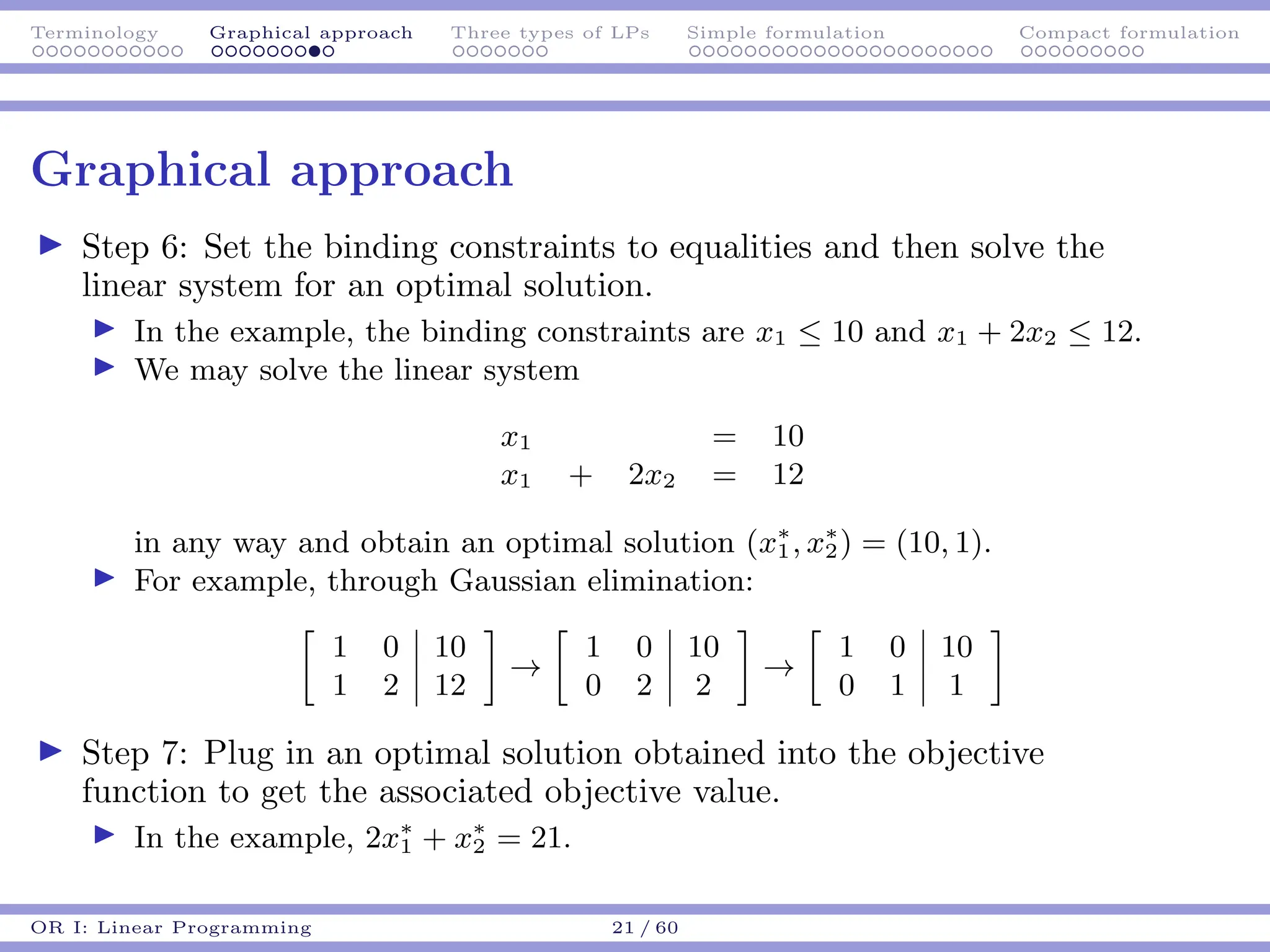
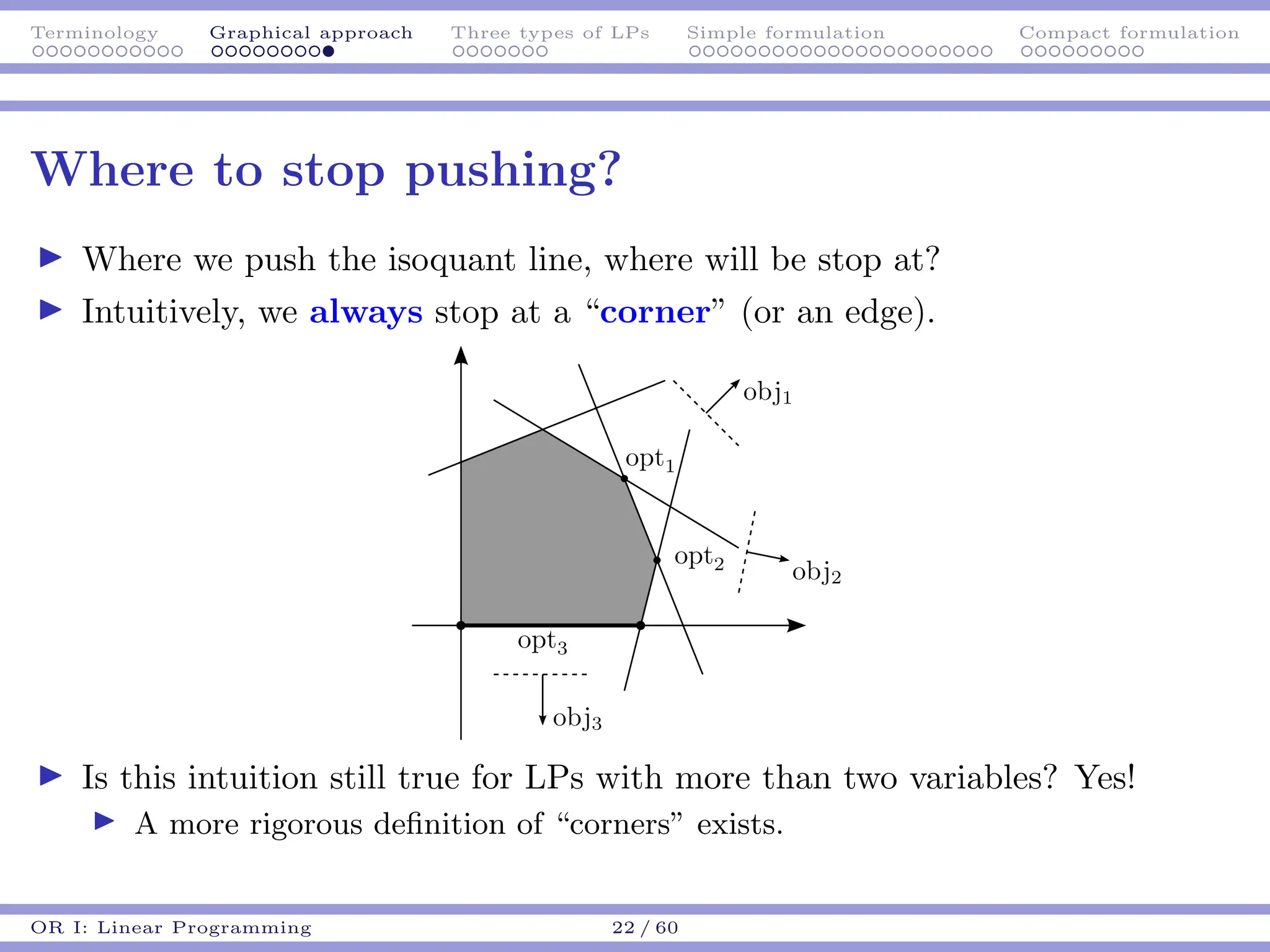
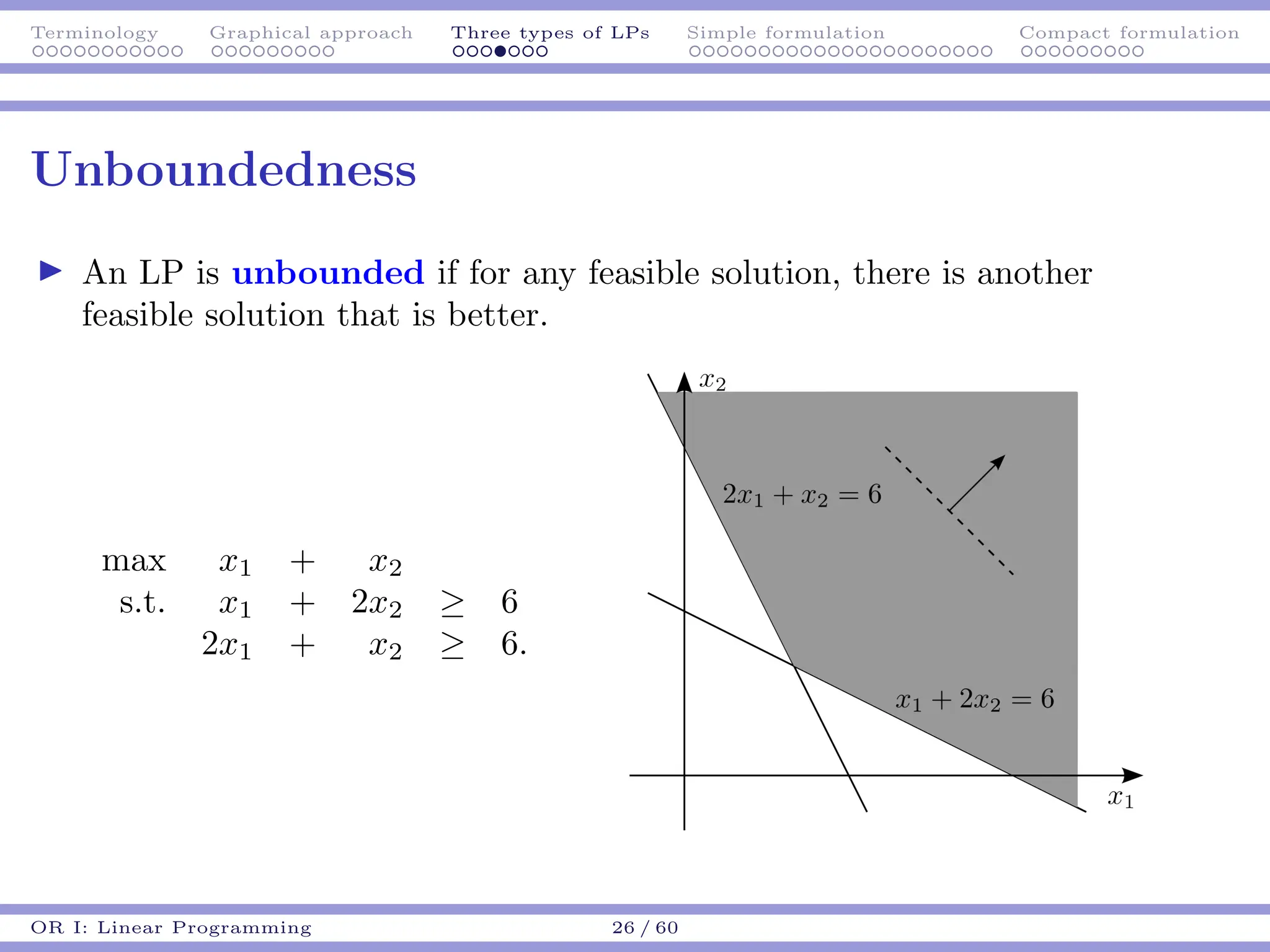
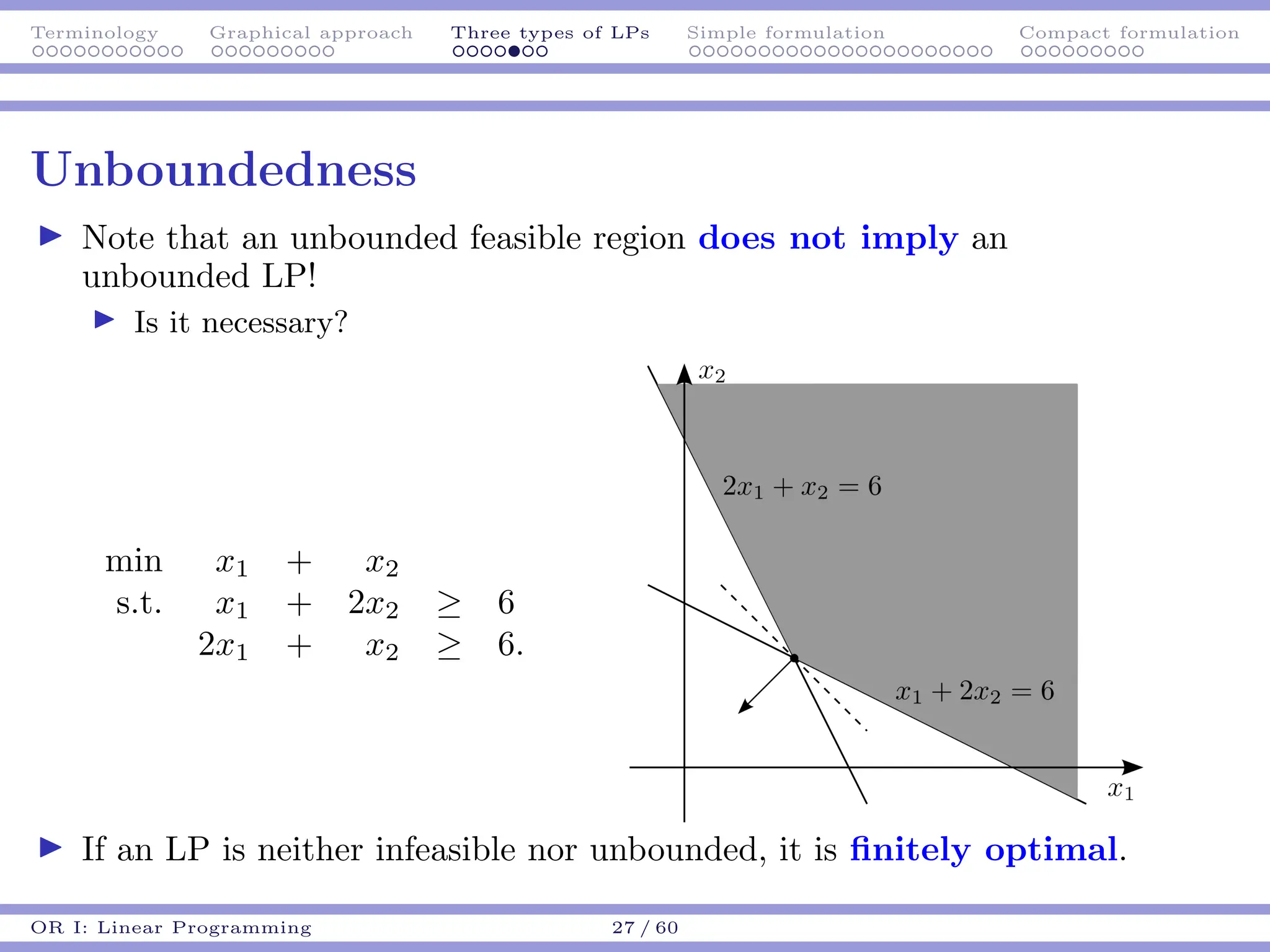
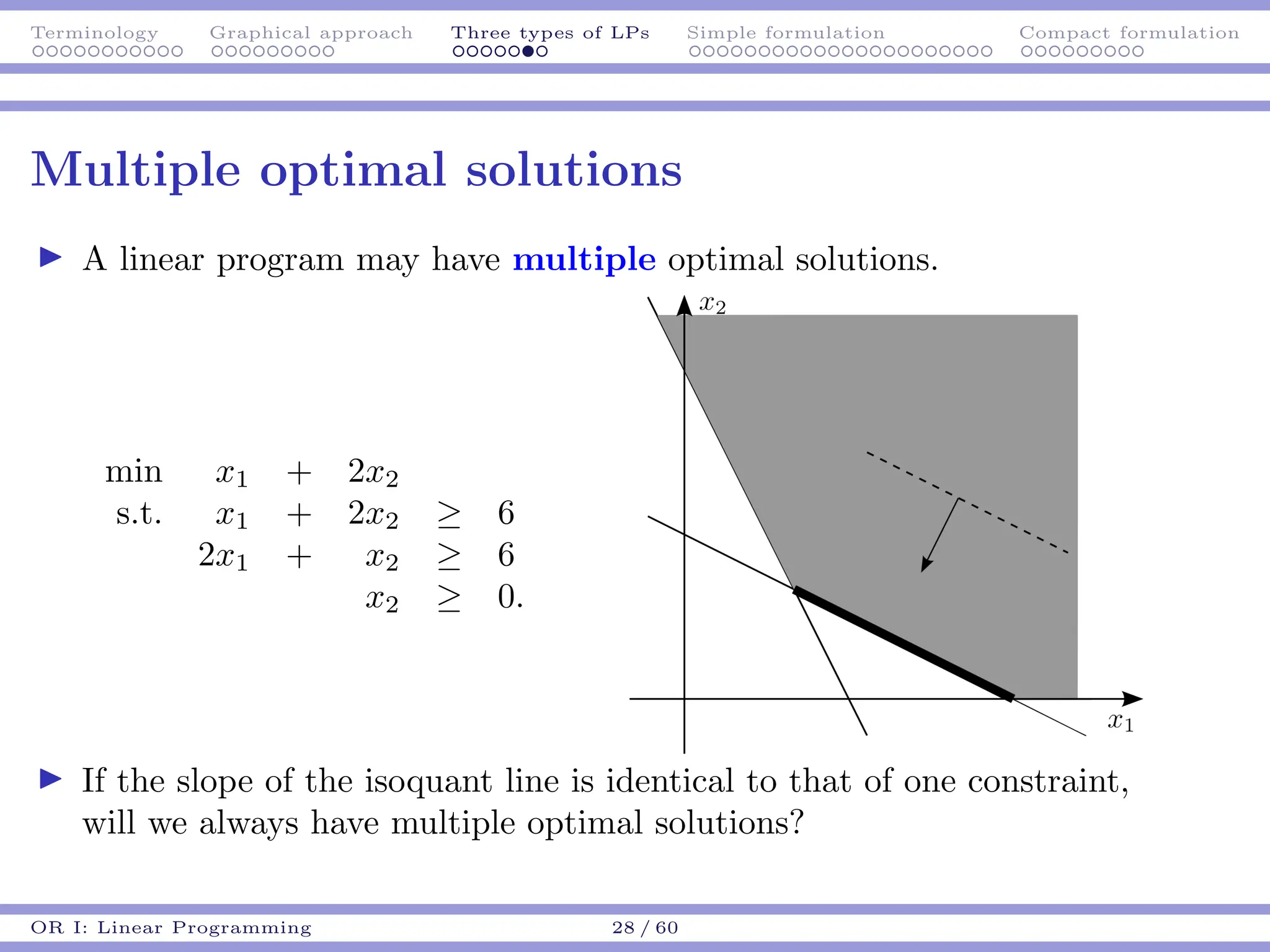
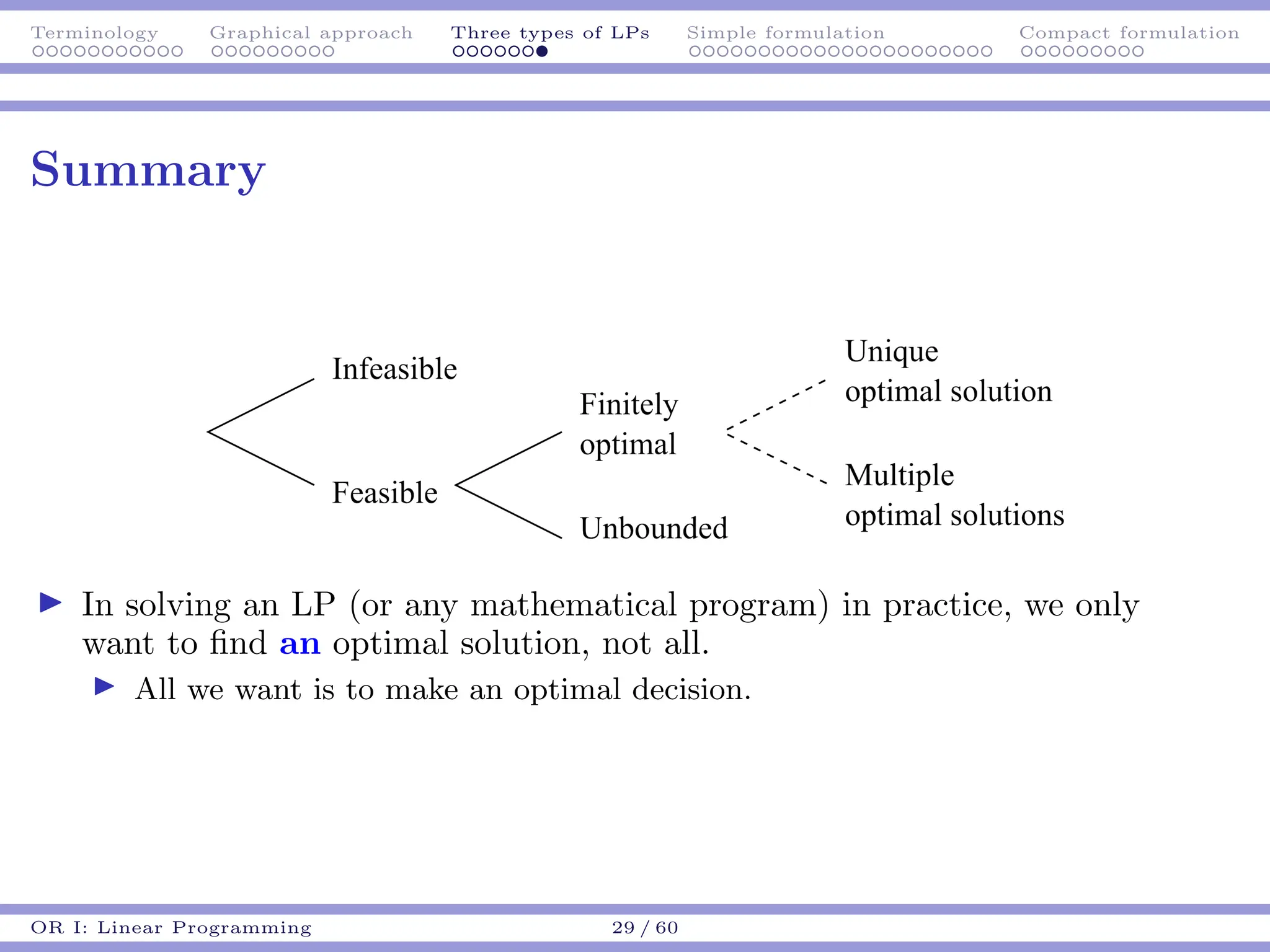
















































































![Ms(lpgraphicalsoln.)[1]](https://cdn.slidesharecdn.com/ss_thumbnails/mslpgraphicalsoln-150322191407-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)























