Downloaded 340 times





















1. Thomas' algorithm, also called the tridiagonal matrix algorithm (TDMA), is used to solve systems of equations with a tridiagonal matrix structure. 2. It works by applying Gaussian elimination to convert the system of equations into an upper triangular system that can then be solved using backward substitution. 3. An example problem demonstrating the algorithm is worked through, showing the conversion to upper triangular form and solution via backward substitution.
Overview of Thomas algorithm and LU decomposition for tri-diagonal systems.
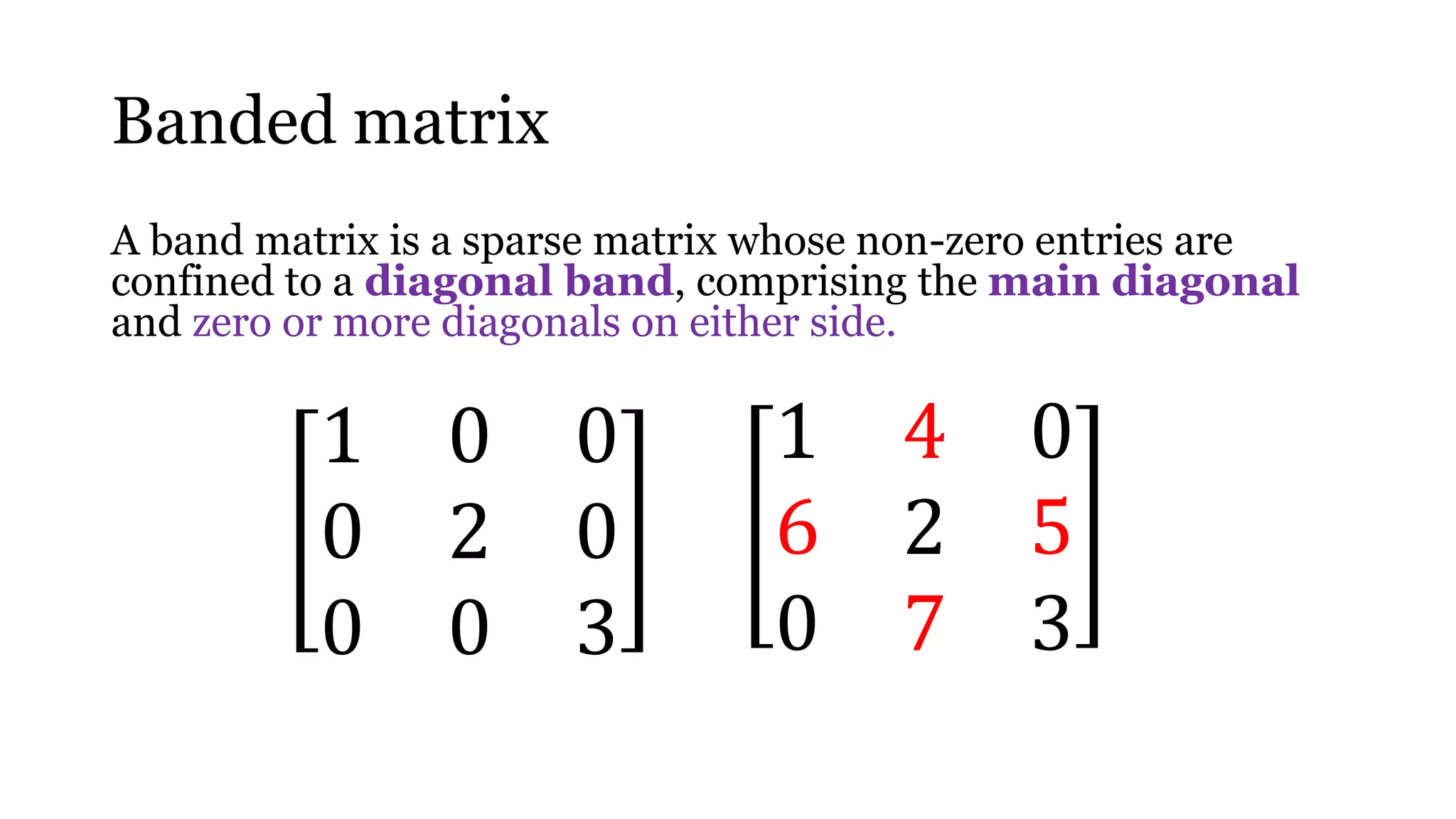
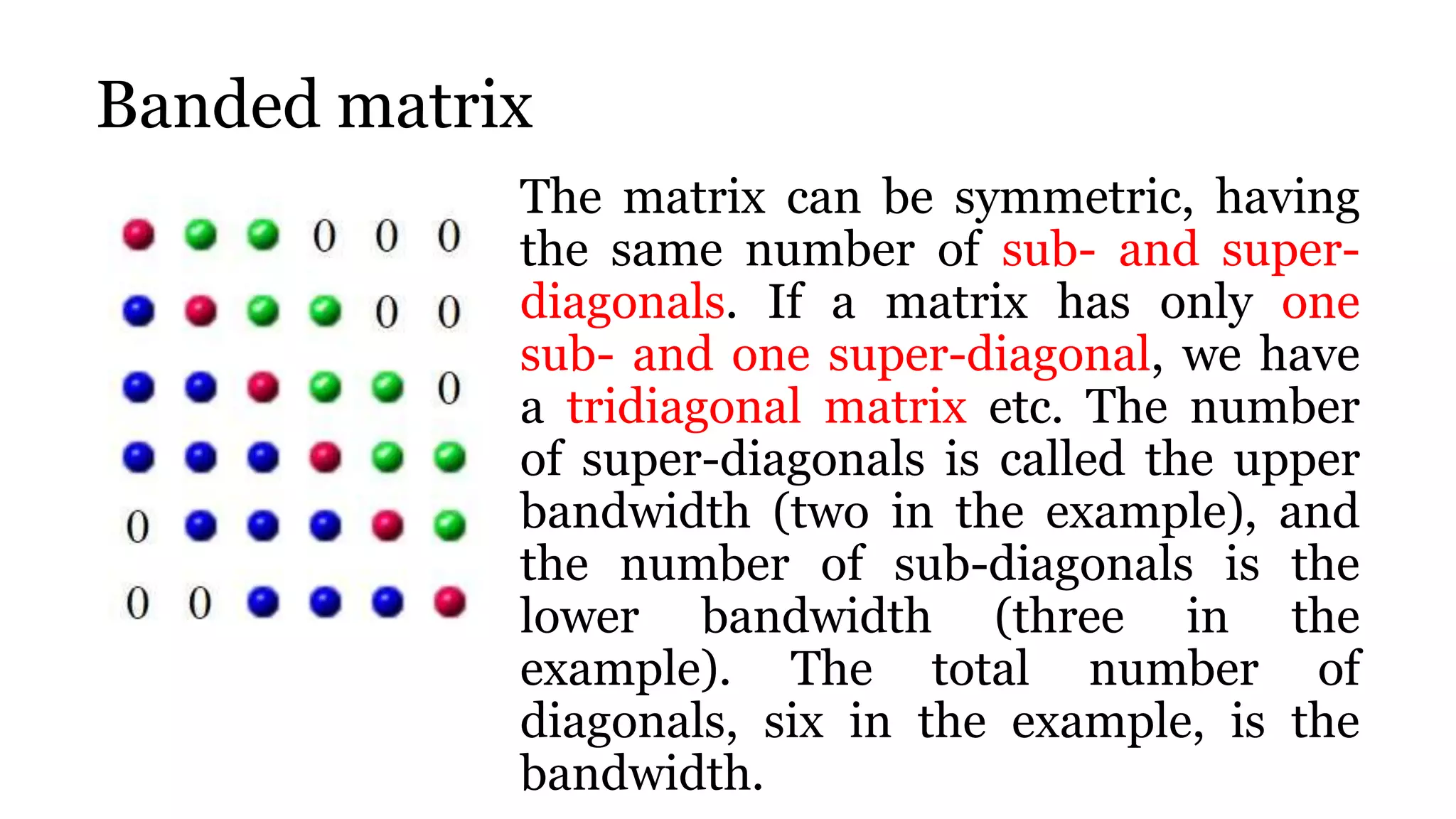
Definition of banded matrices and their characteristics including upper and lower bandwidth.
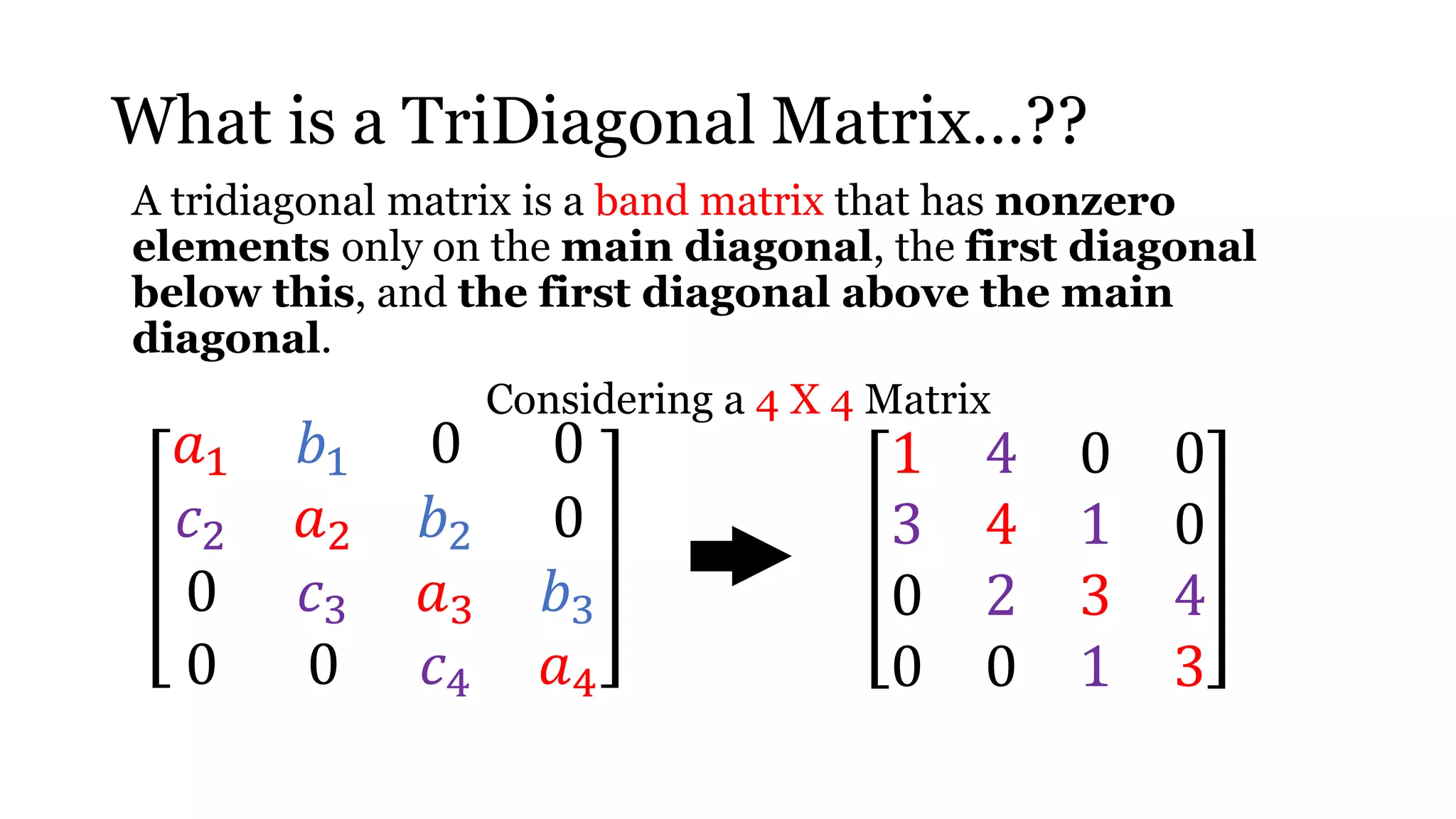
Tri-diagonal matrix specifics with non-zero elements only on the main, upper, and lower diagonals.
Explains Thomas’ algorithm used to solve tridiagonal systems using Gaussian elimination.
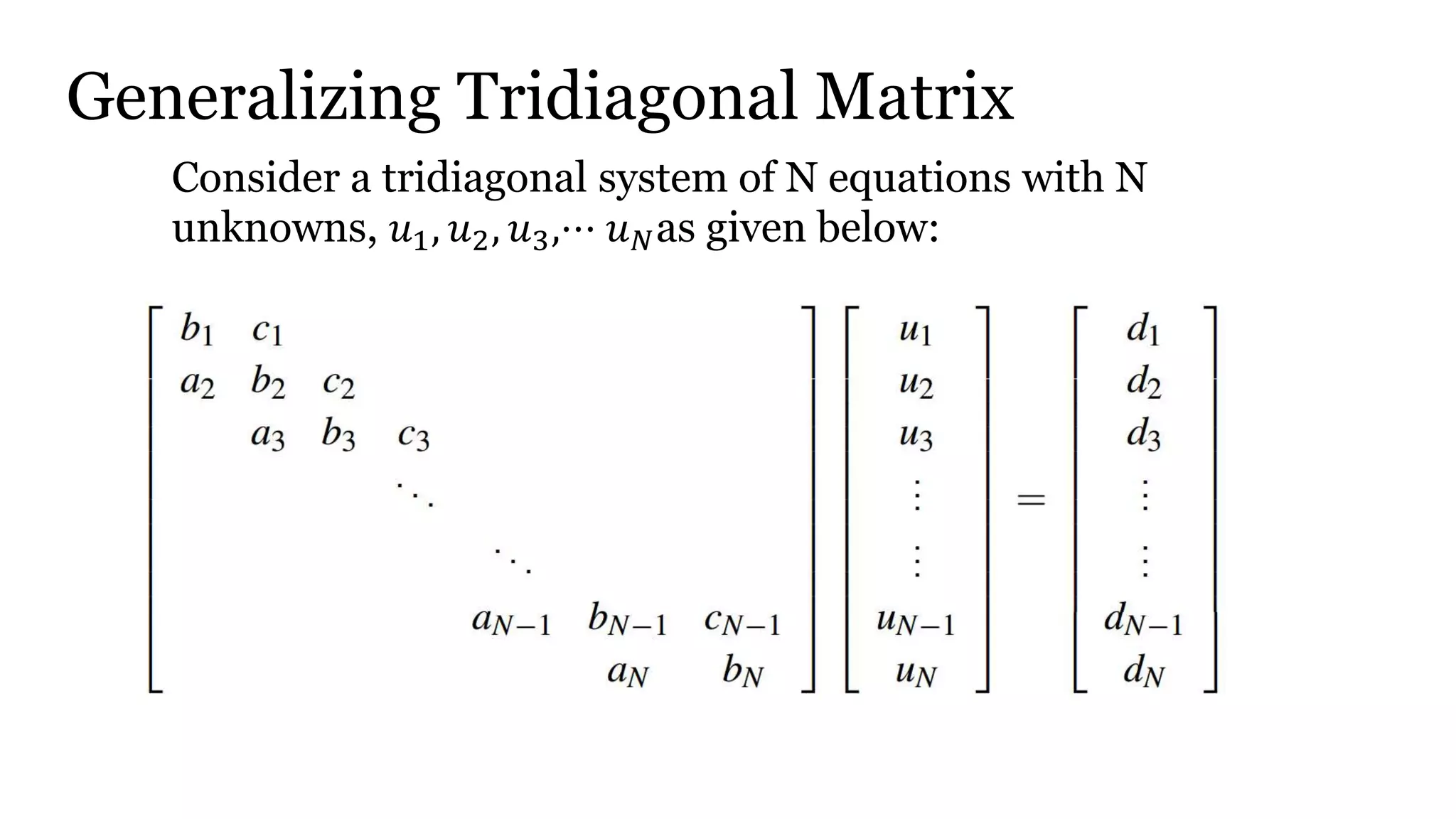
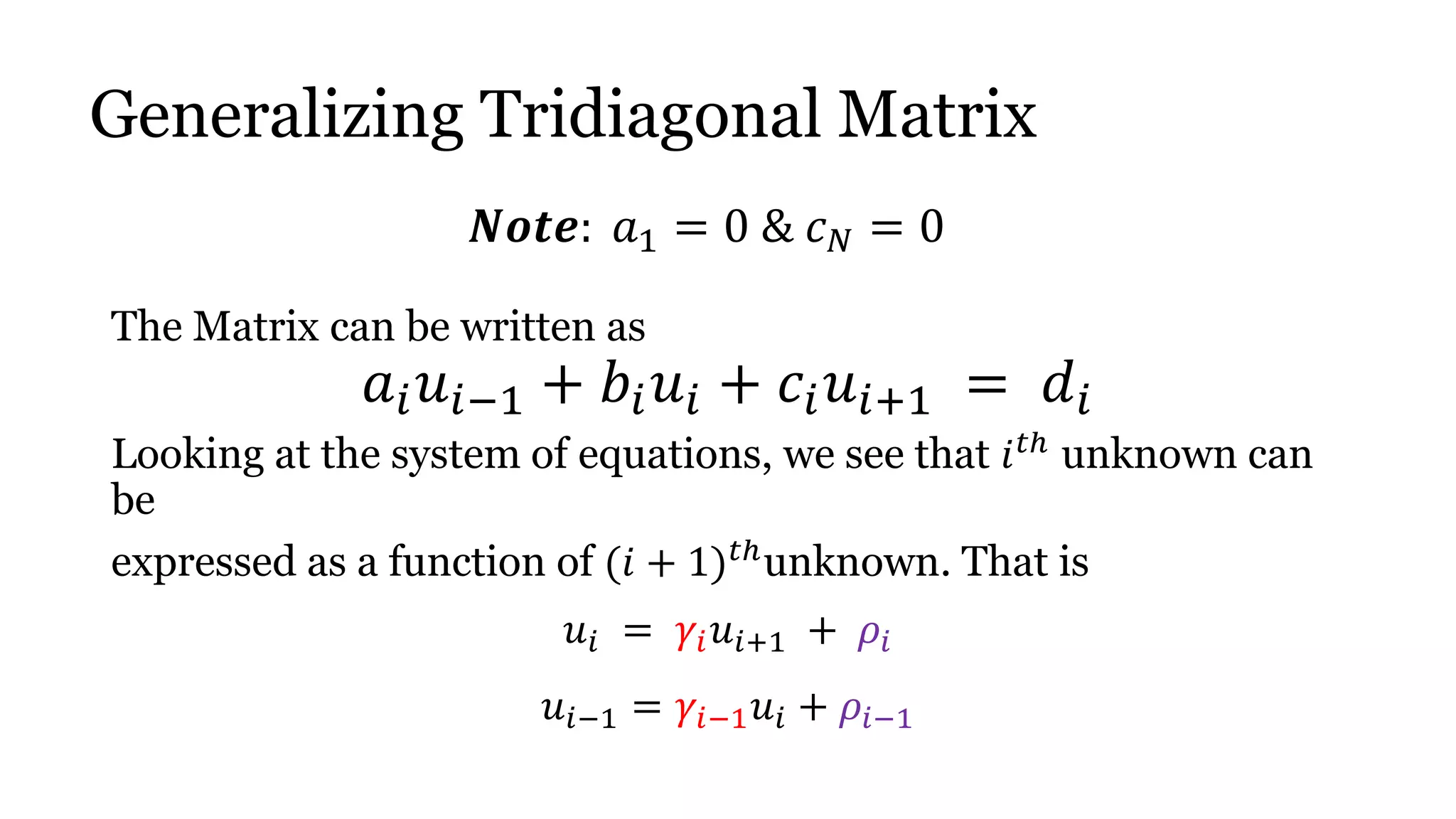
Mathematical formulation of tridiagonal systems and how unknowns relate to neighbouring values.
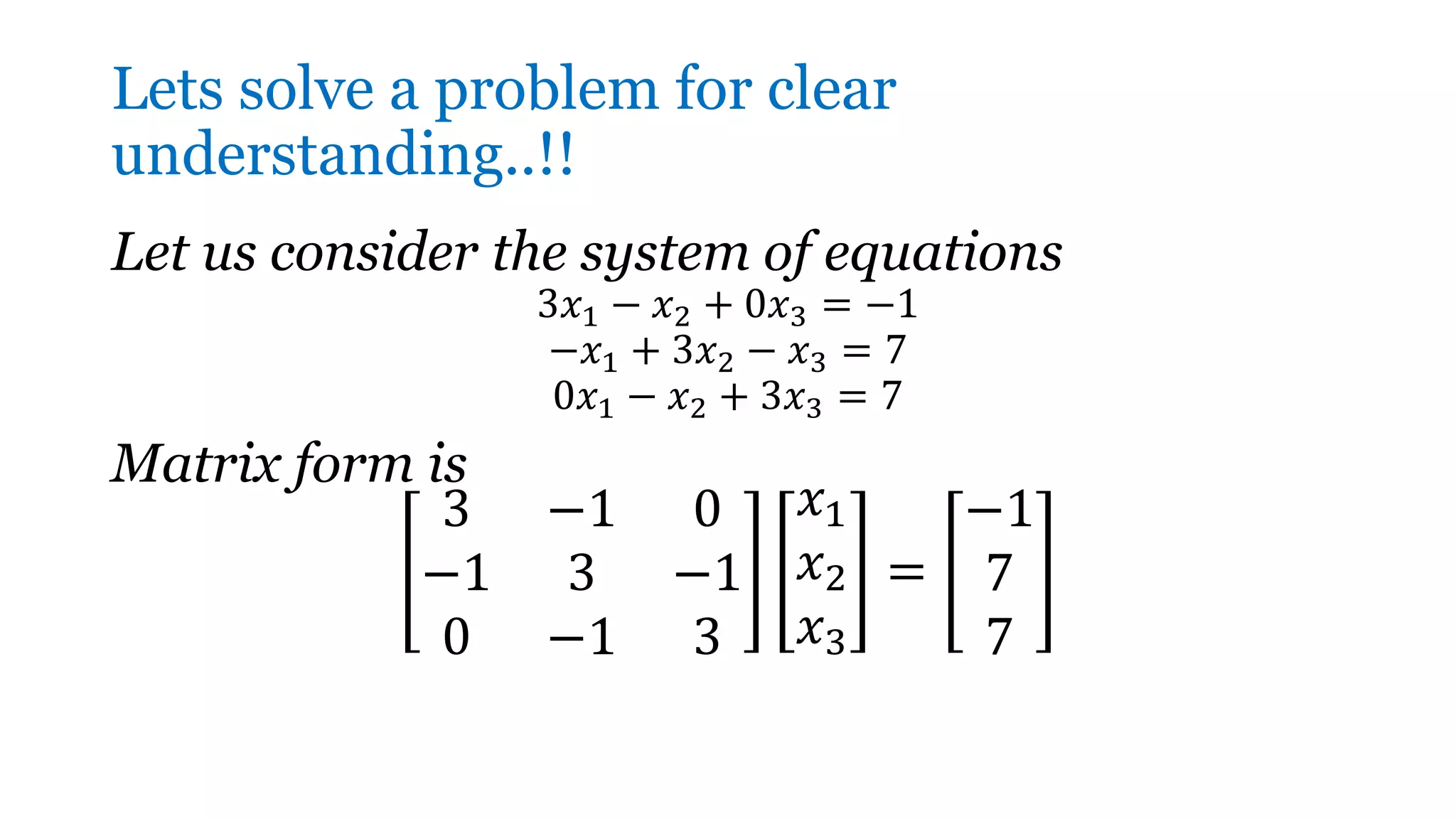
Presentation of a sample system of equations structured in matrix form for better understanding.
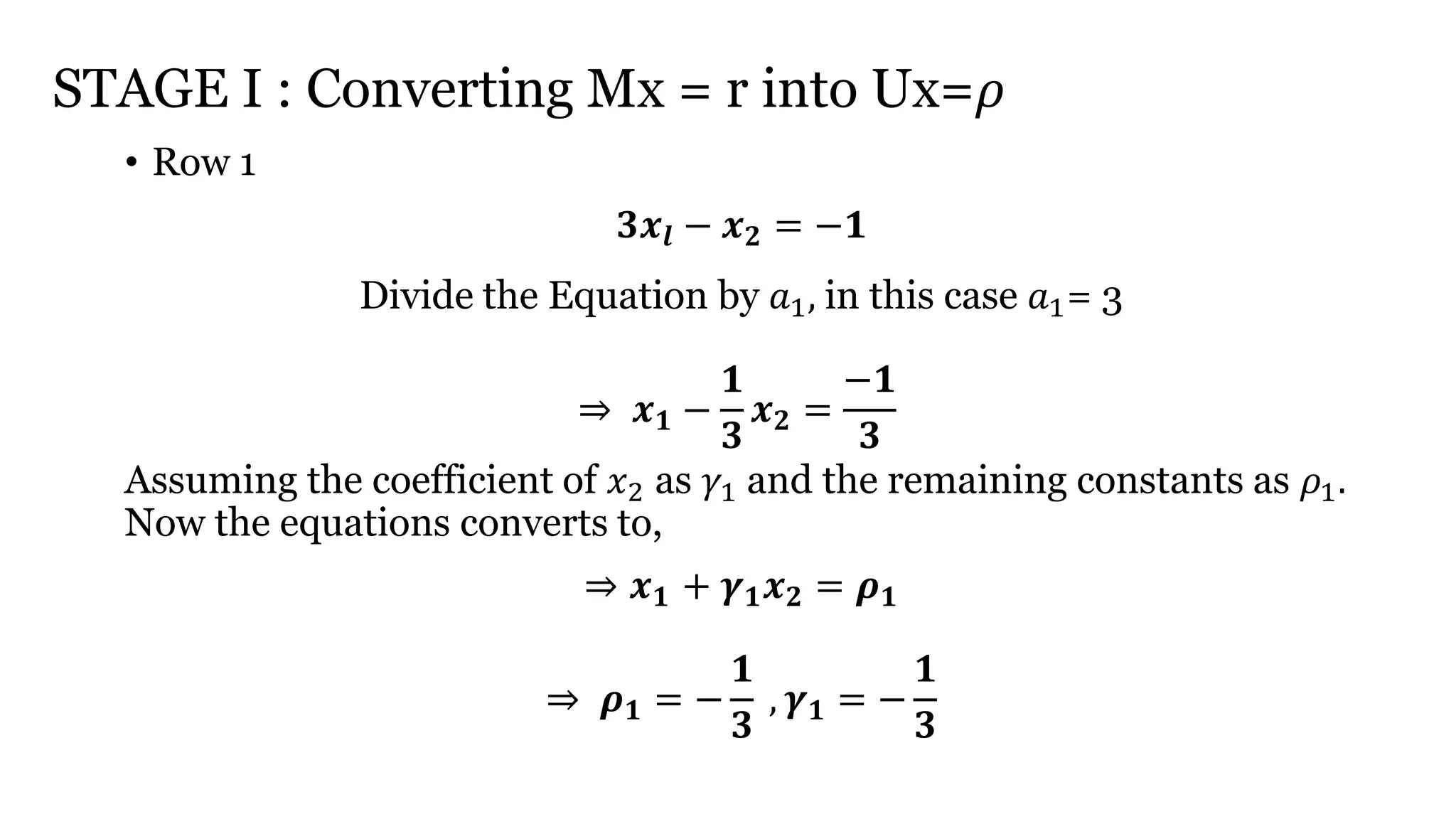
Describes the first stage of the algorithm focusing on modifying equations, dividing, and substituting.
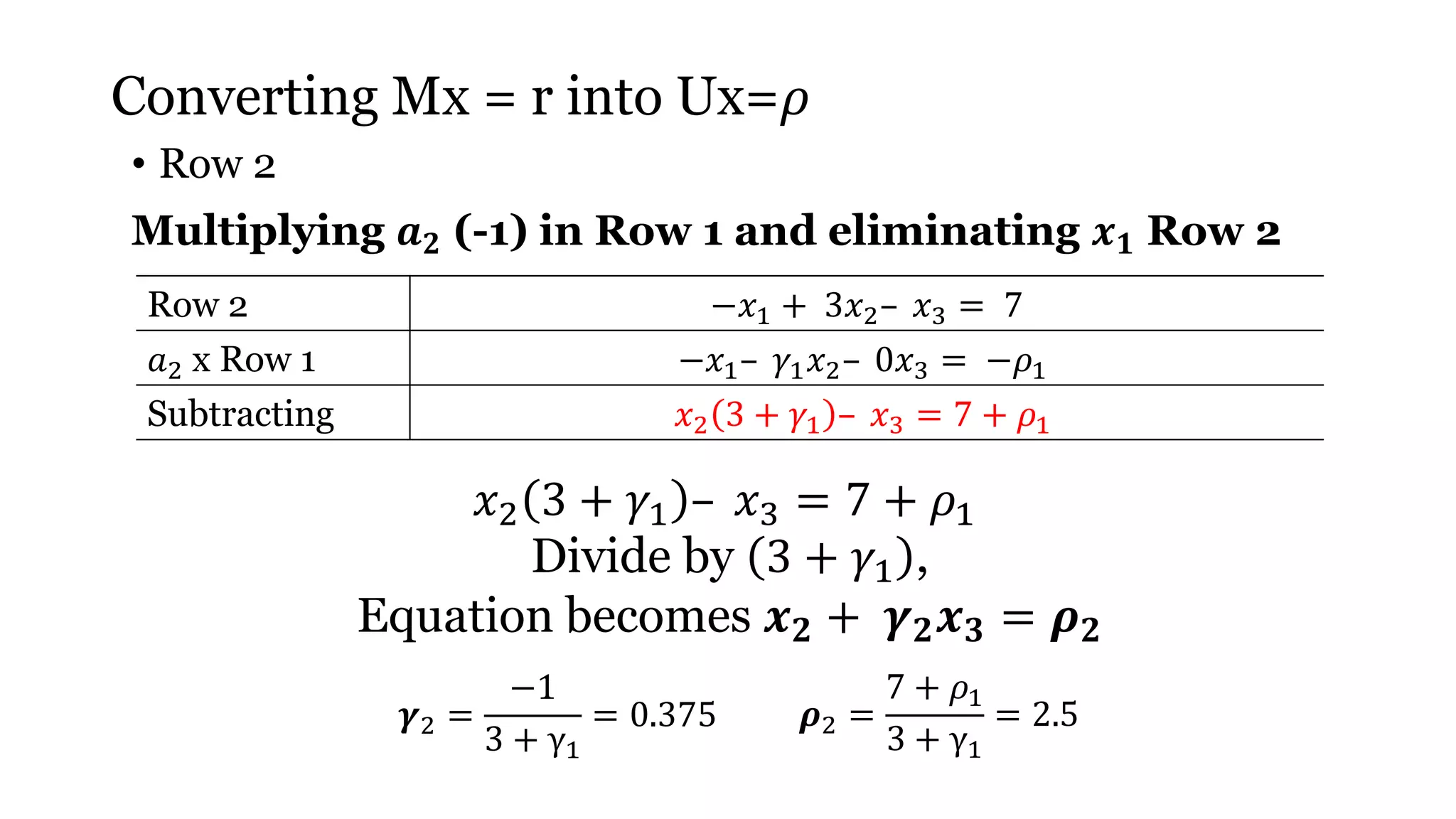
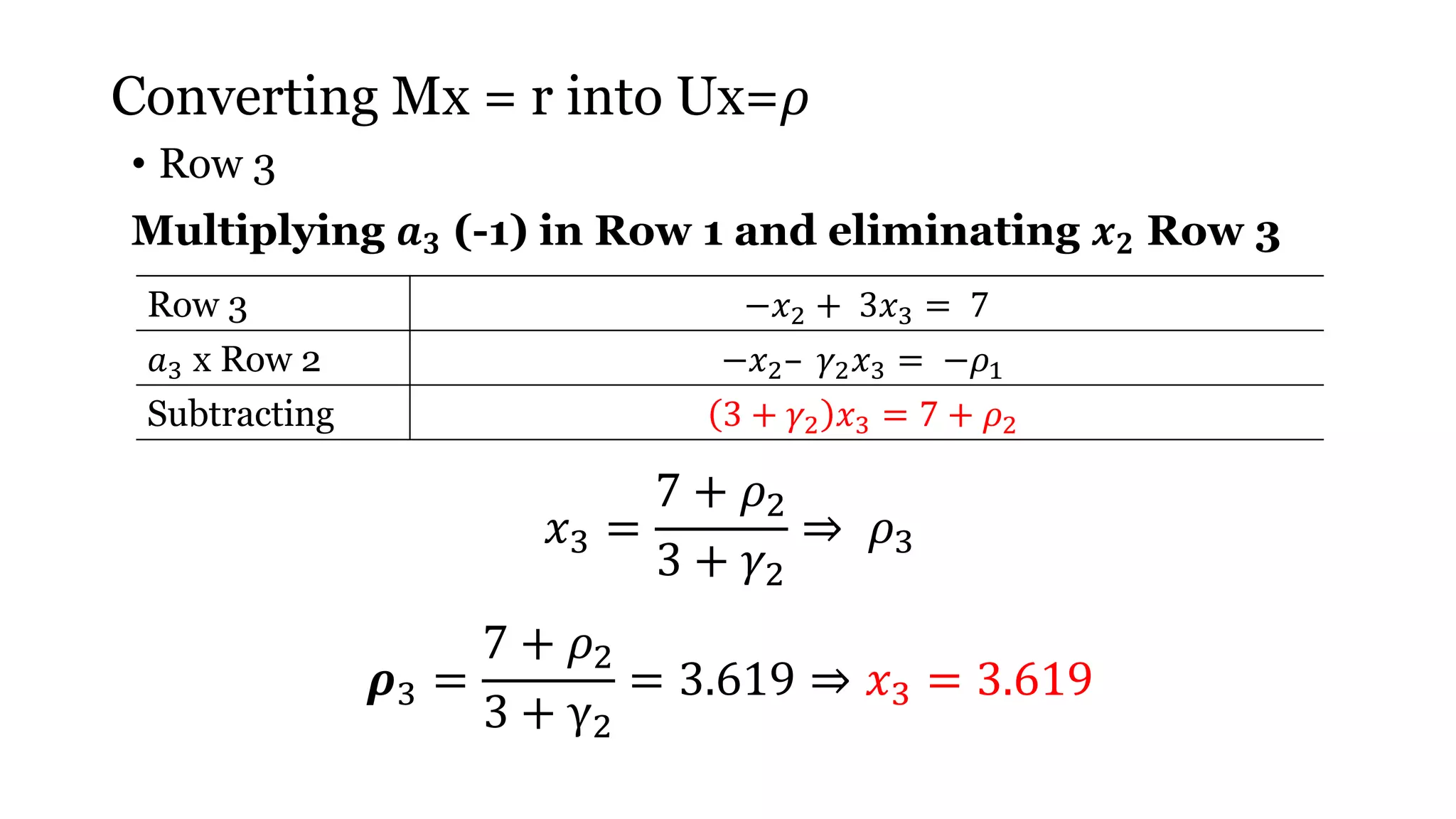
Further steps in the forward elimination process addressing subsequent rows and results.
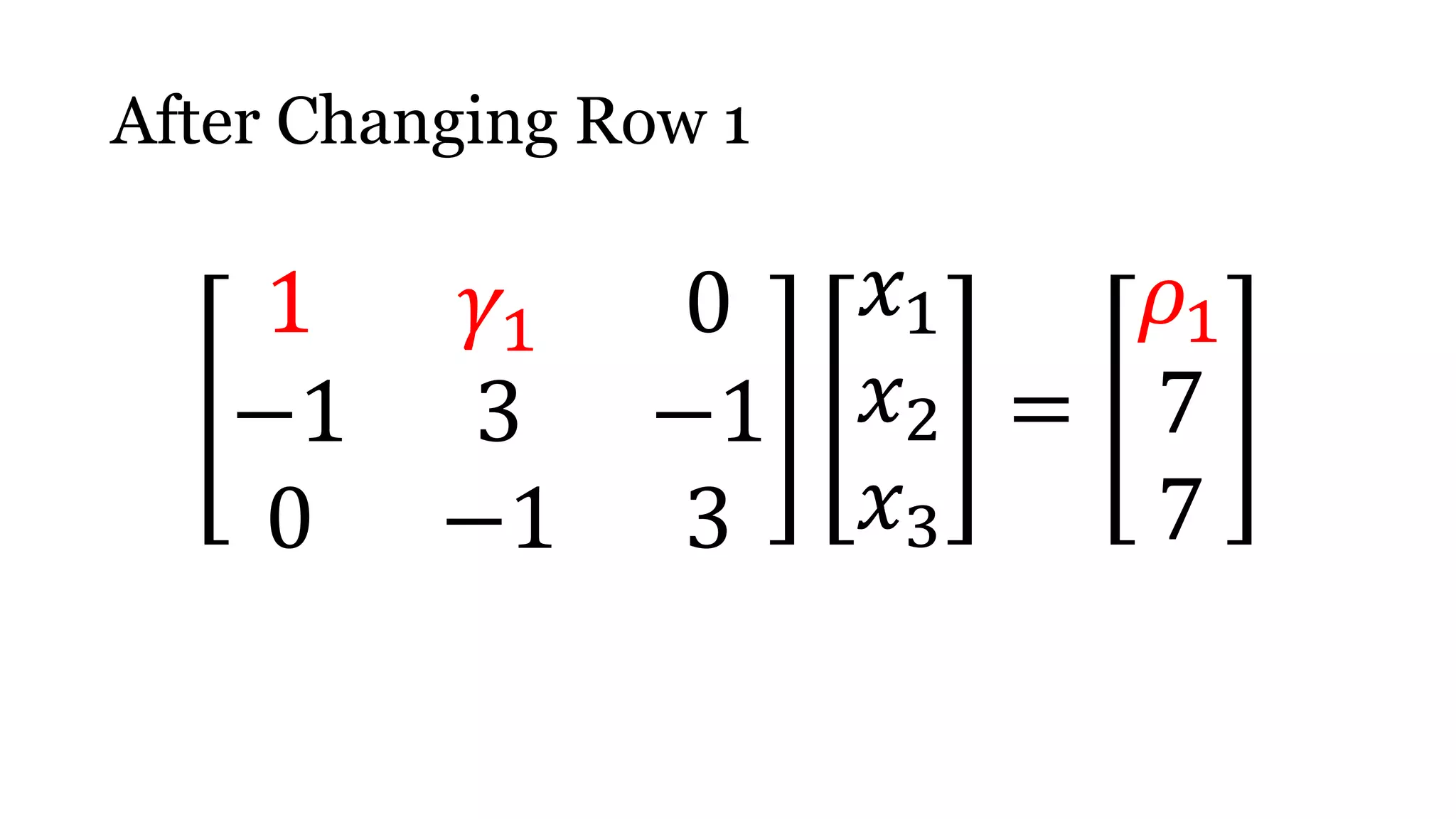
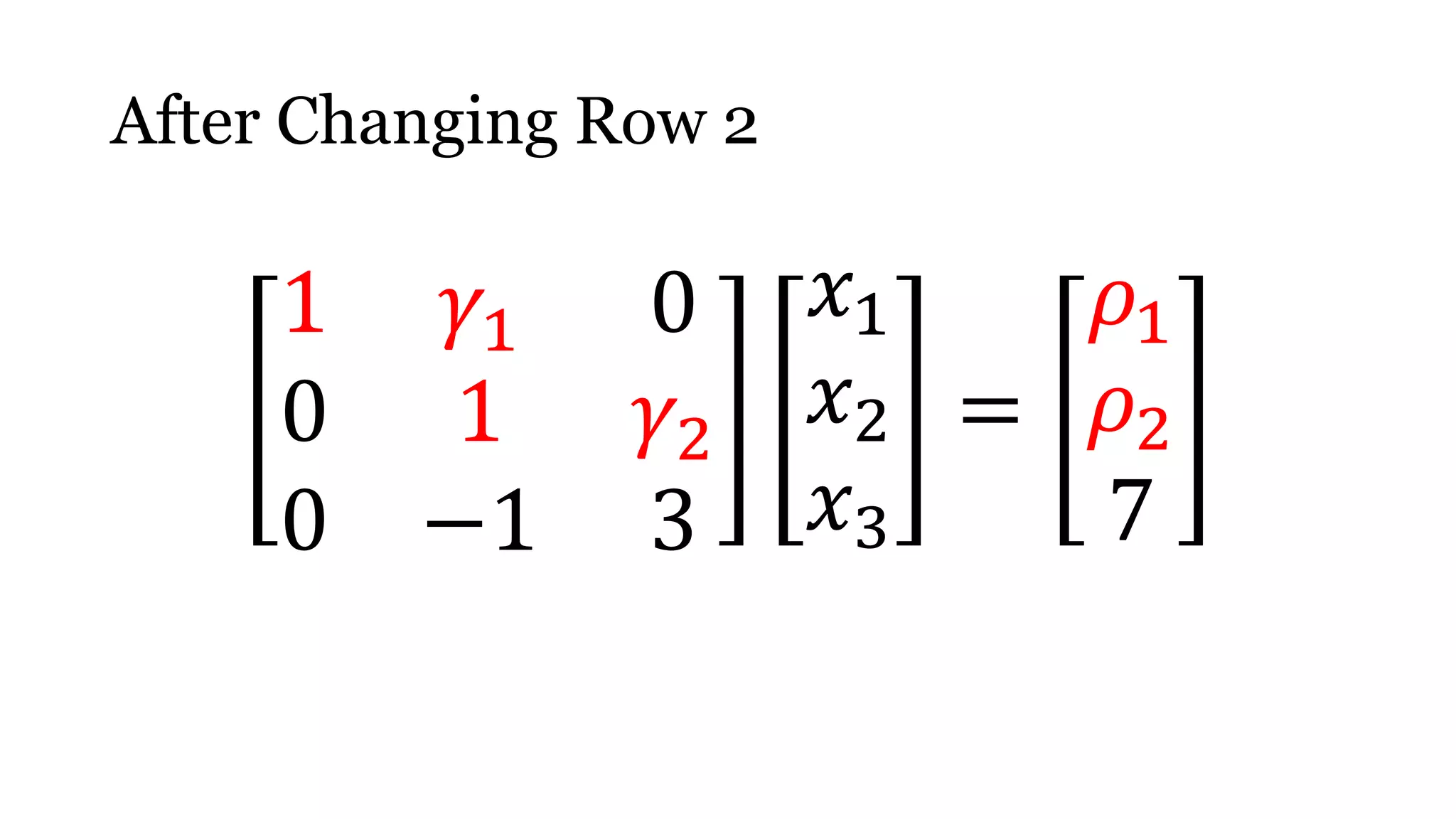
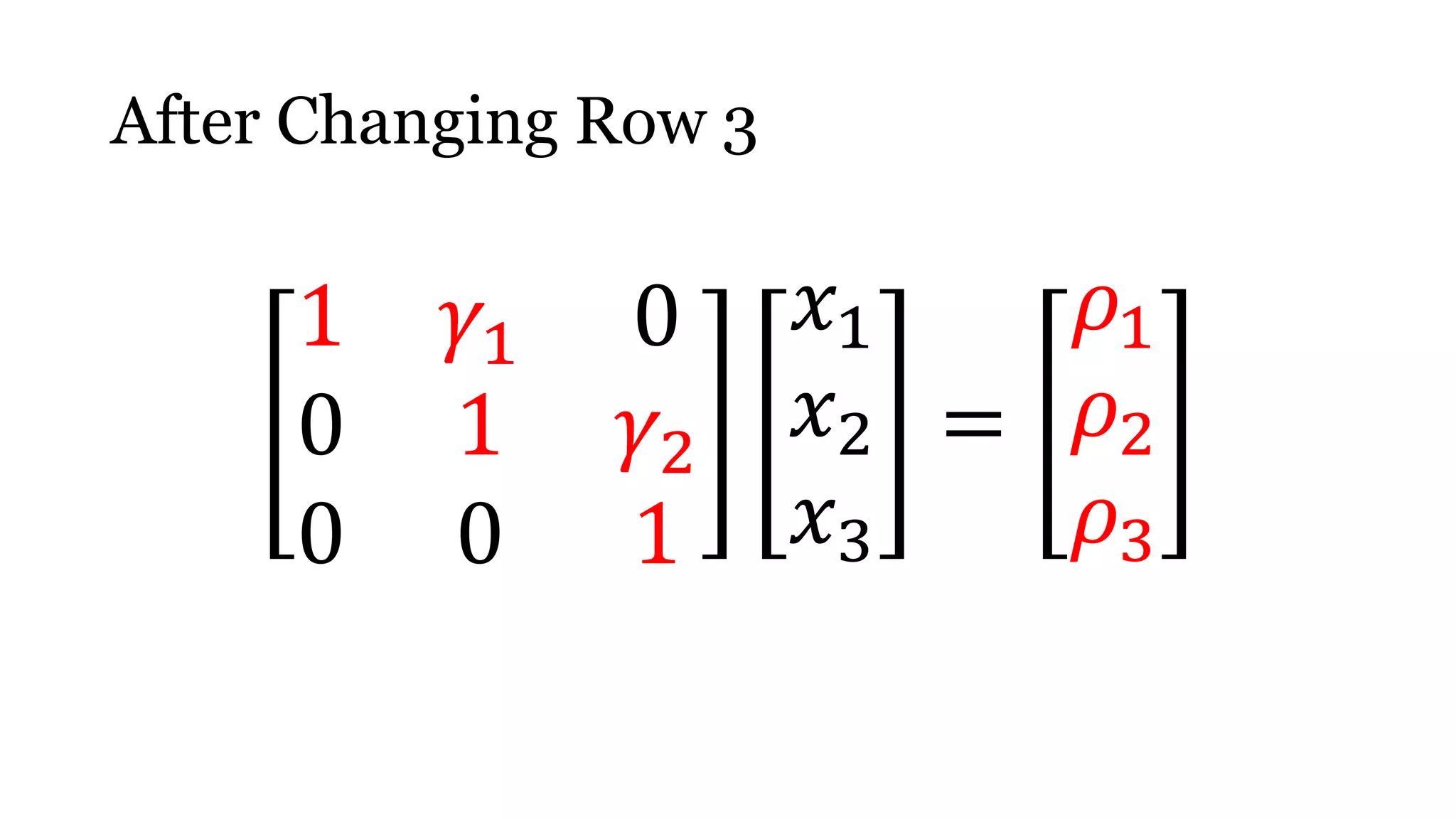
Final adjustments to the matrix after completing row operations in the forward elimination stage.
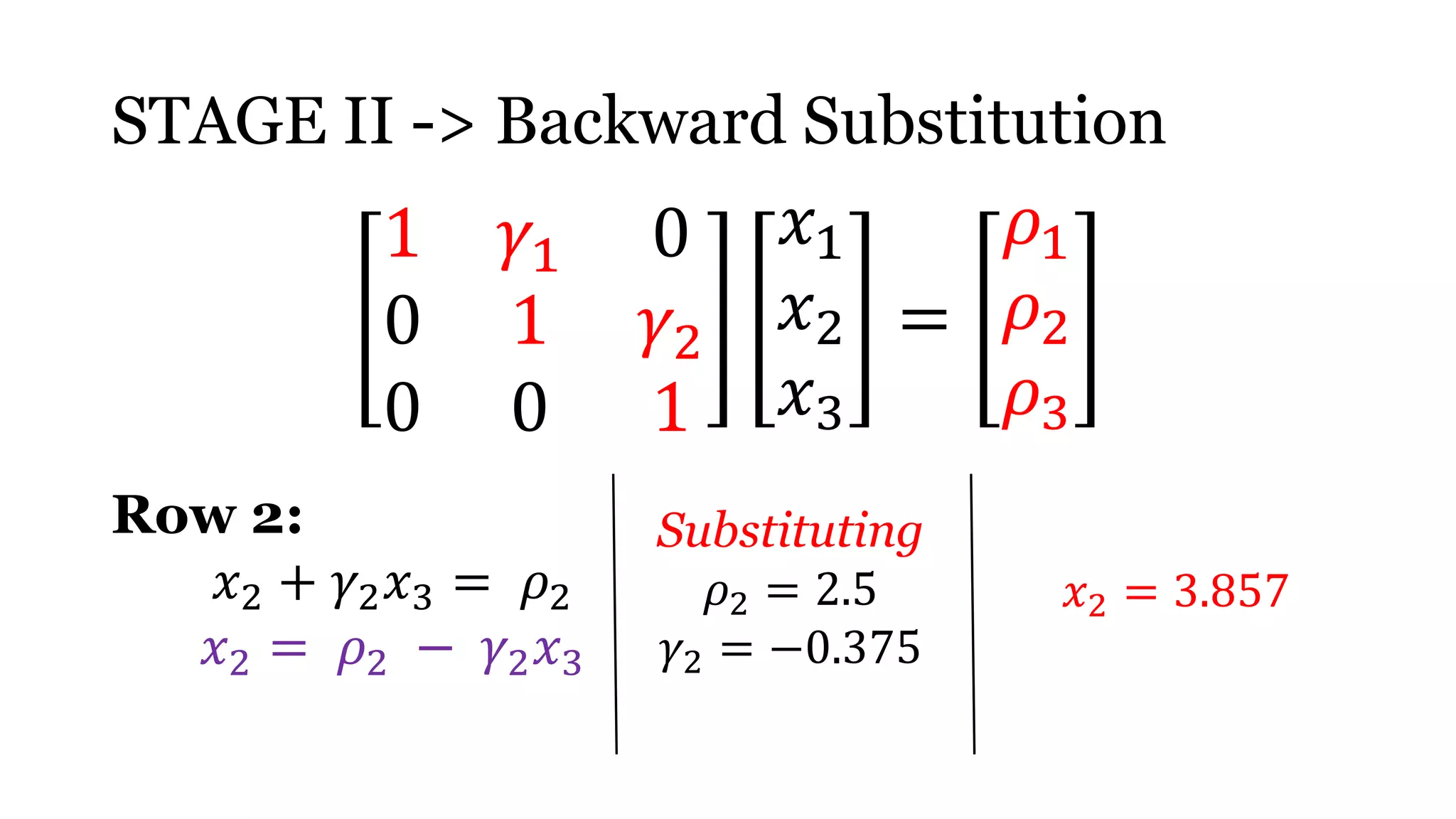
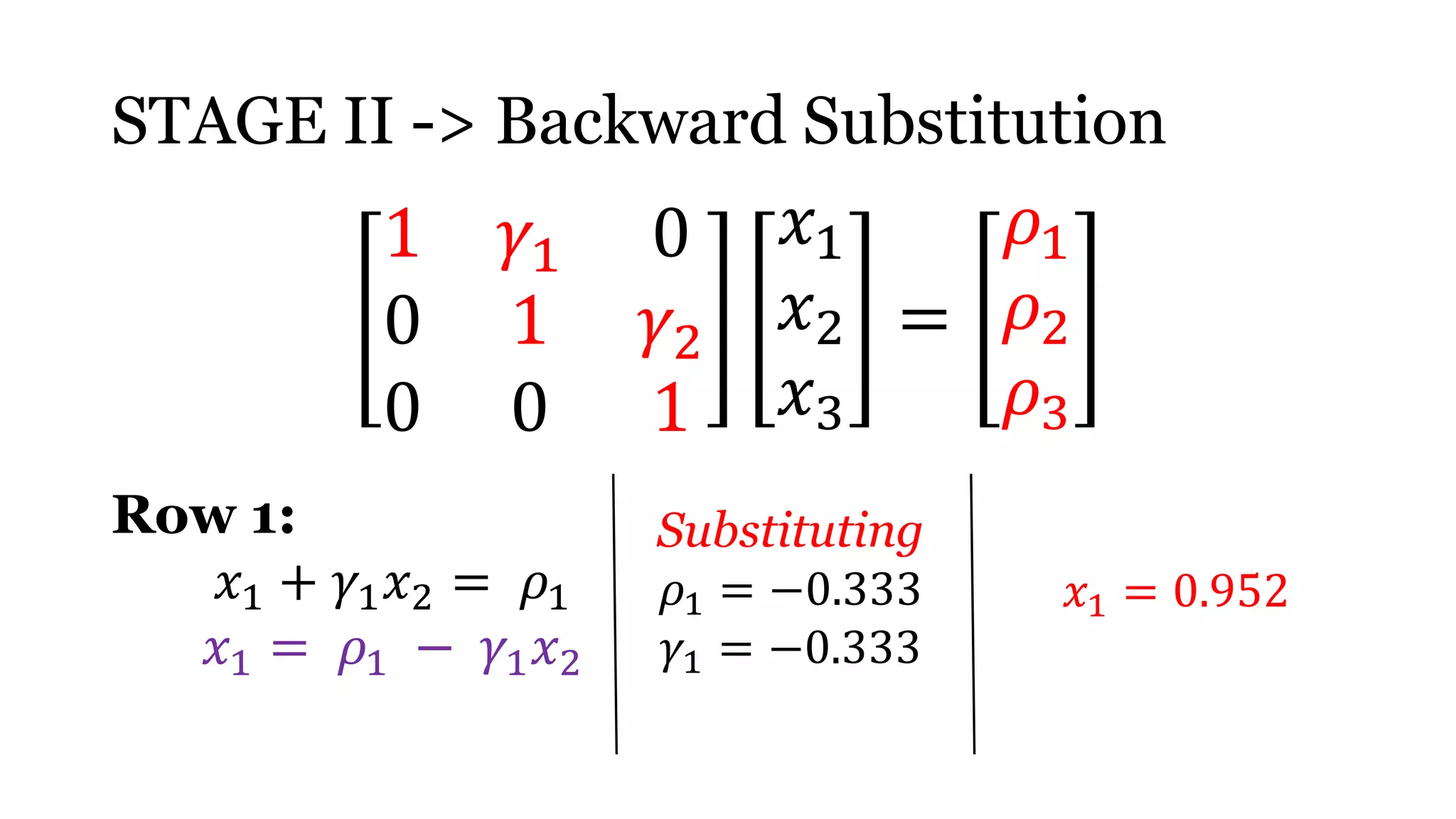
Start of backward substitution using computed values to find solutions for unknowns.
Presentation of the final values calculated for the variables x1, x2, and x3.
Reasons for the usage of Thomas algorithm including its efficiency in handling tridiagonal equations.
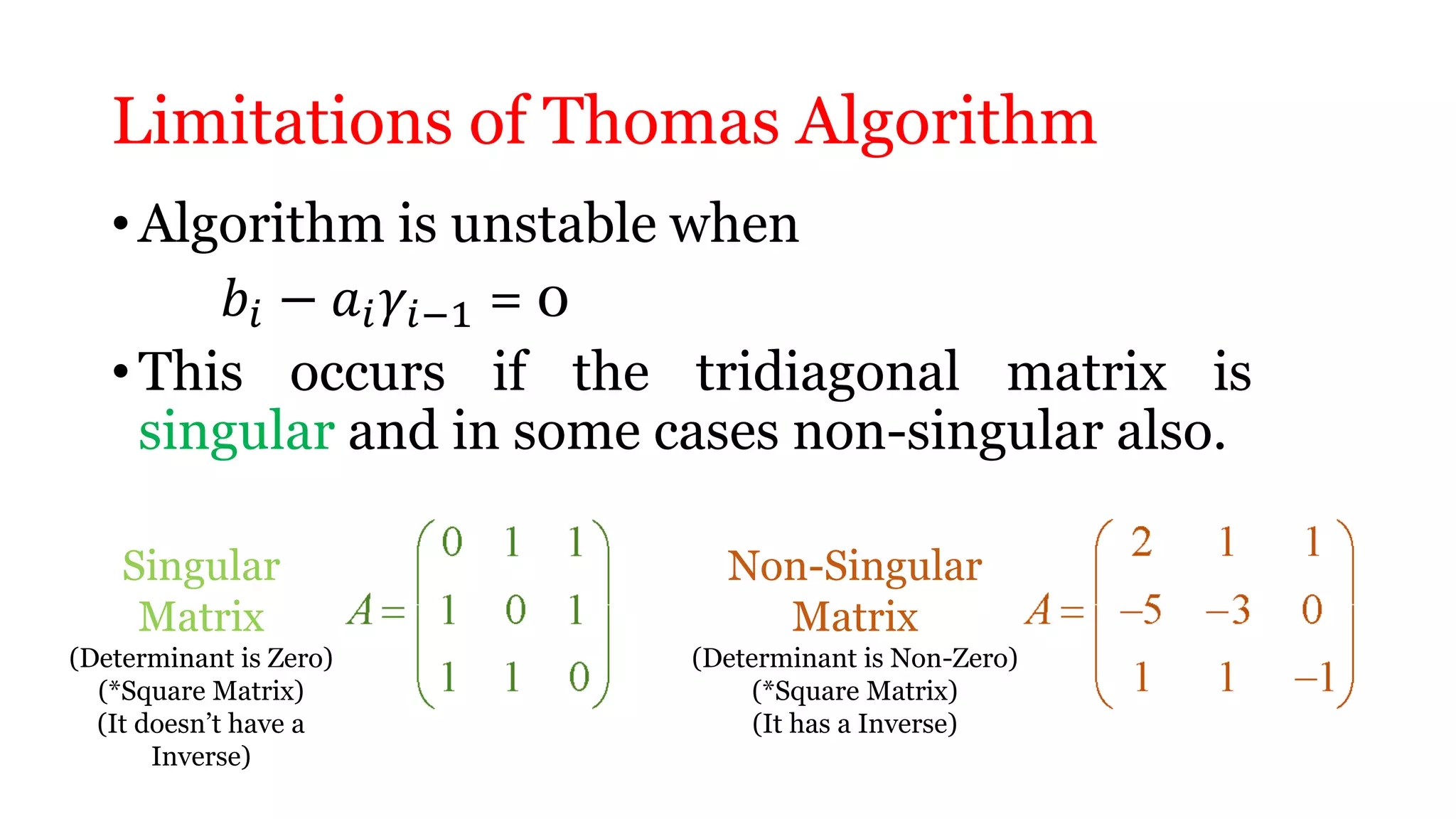
Discusses conditions under which the Thomas algorithm becomes unstable due to matrix singularity.
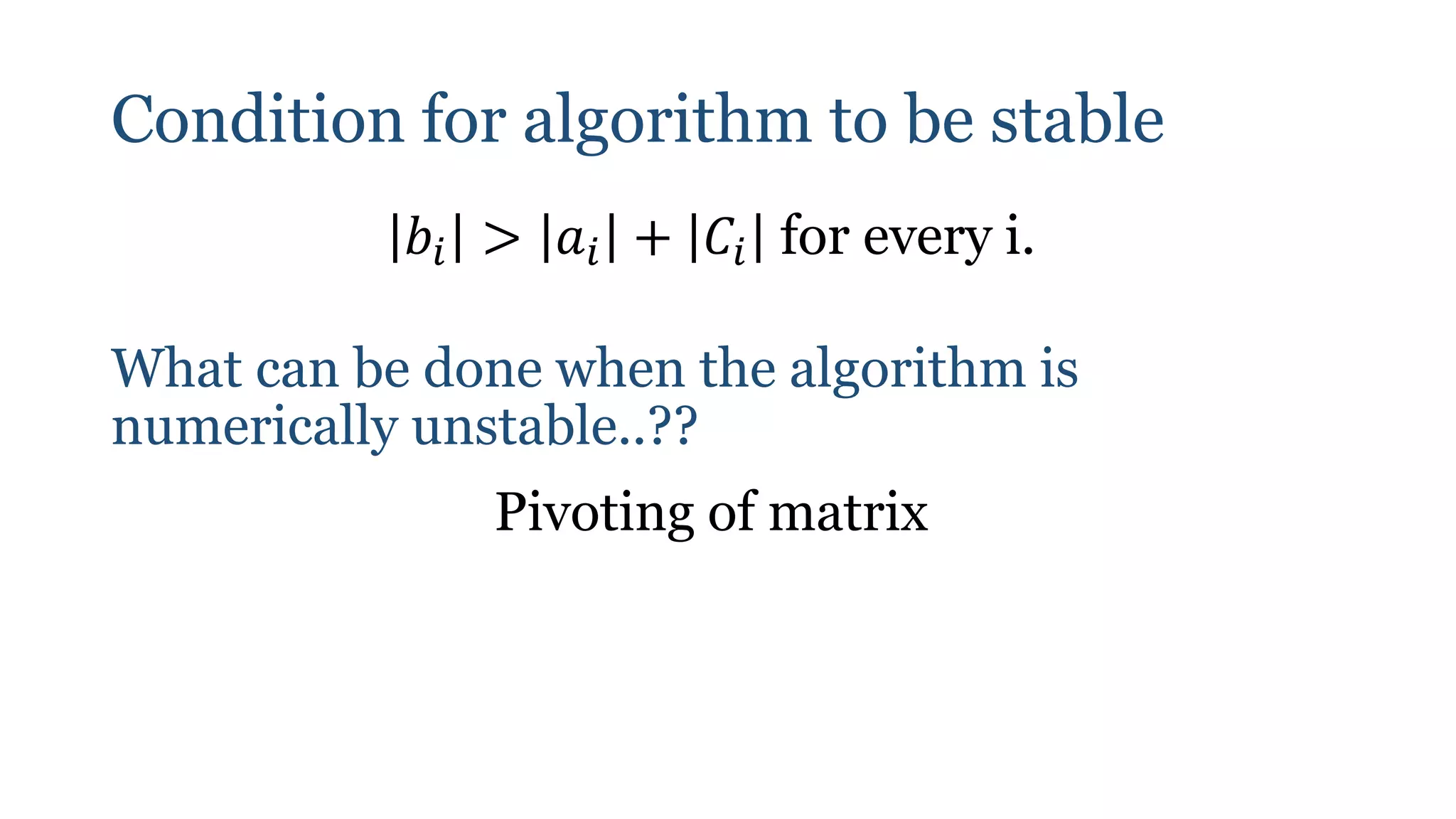
Conditions required for stability in the algorithm and techniques like pivoting to address instability.



















































![ANPARA THERMAL POWER STATION[1] sangam.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/anparathermalpowerstation1sangam-251121115219-9261cde4-thumbnail.jpg?width=640&height=640&fit=bounds)














