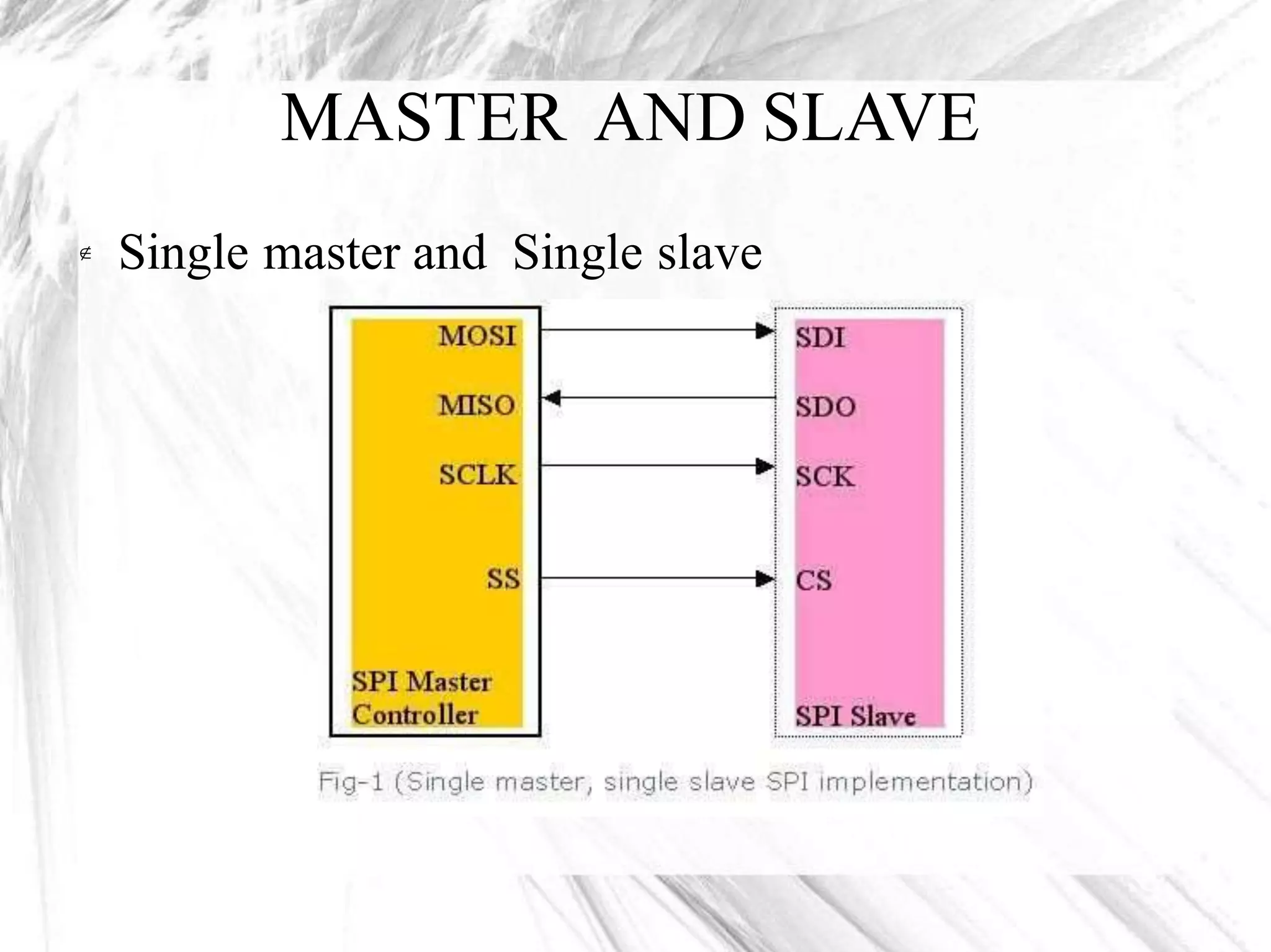
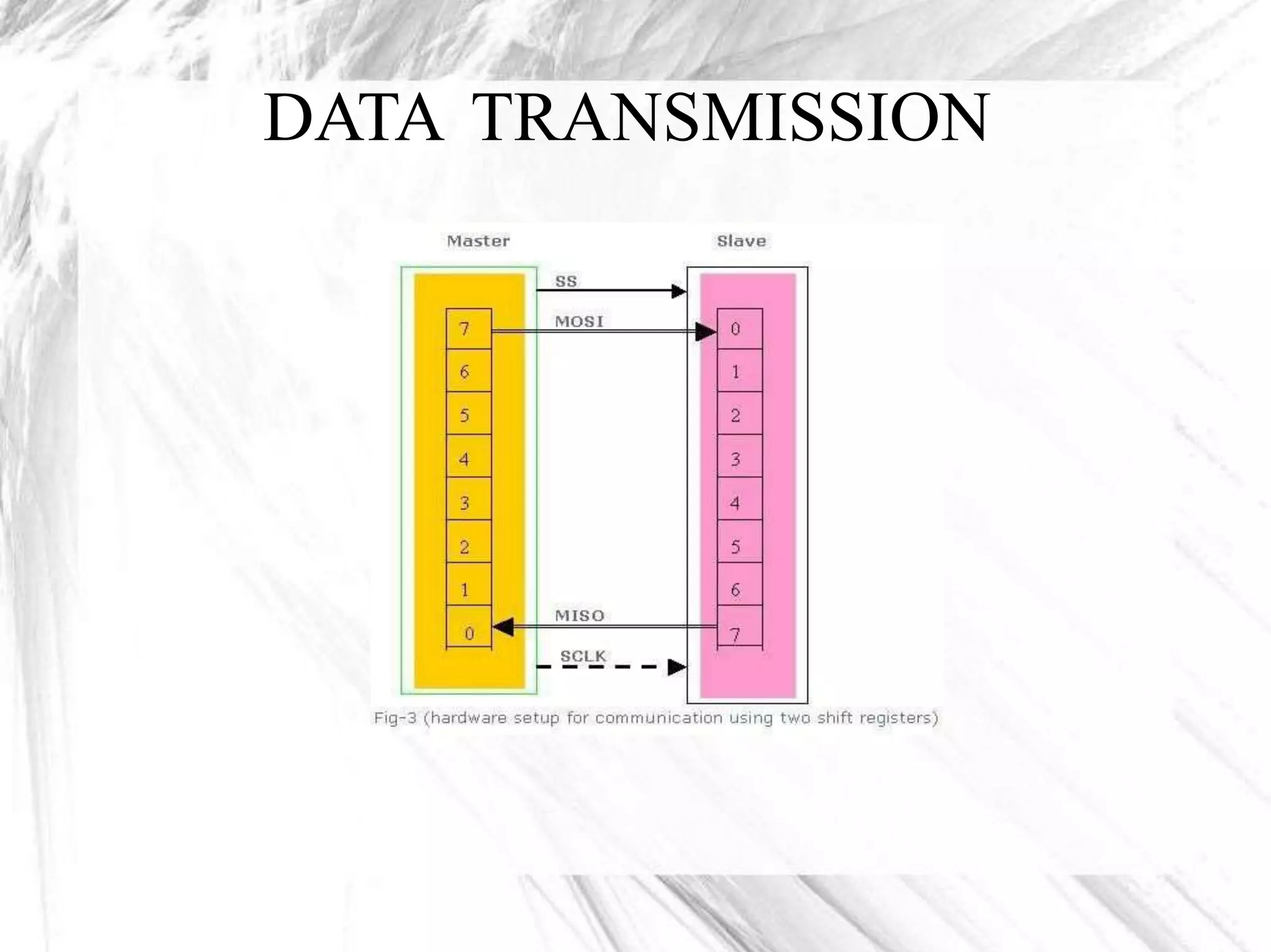
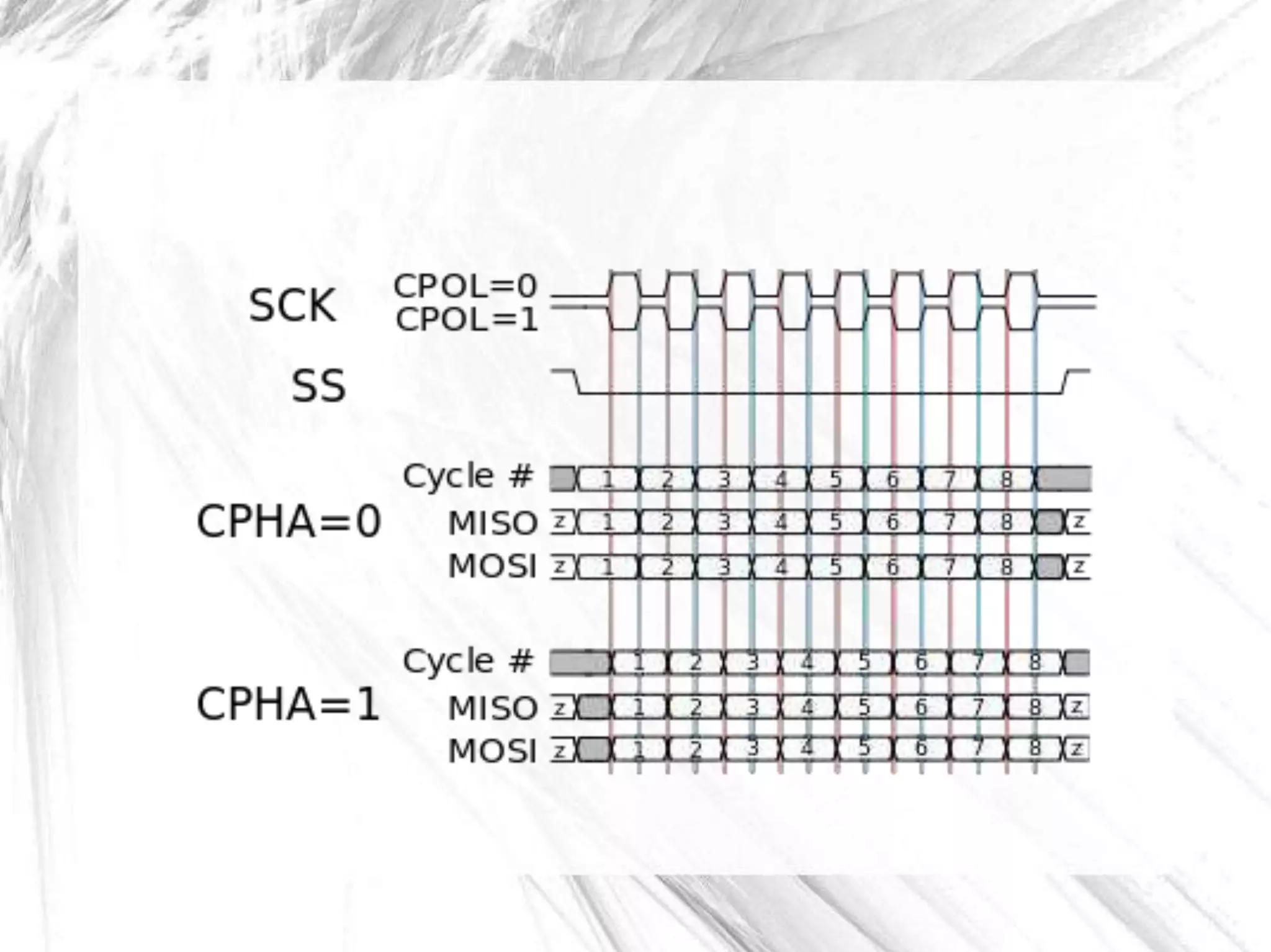
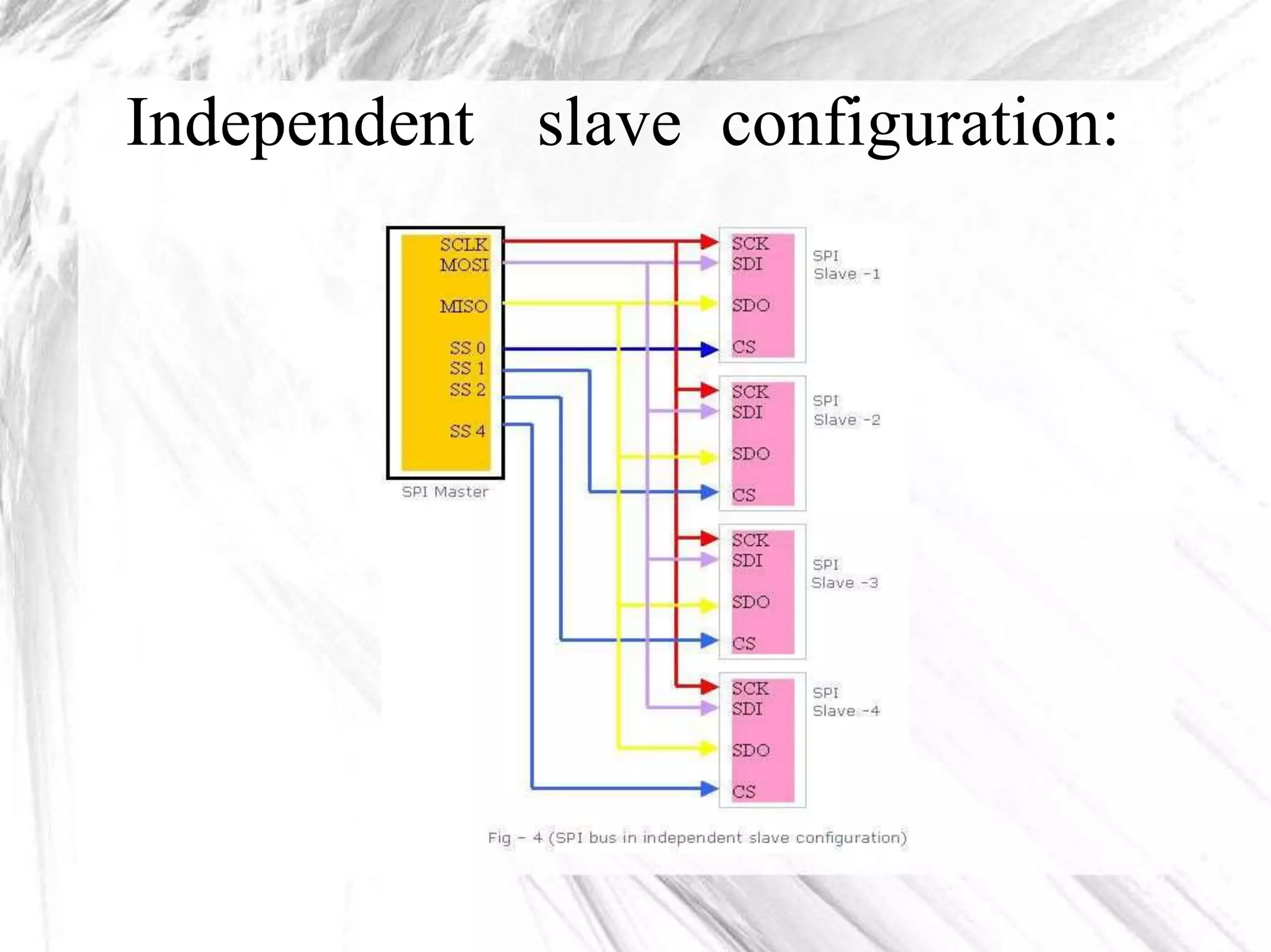






















The Serial Peripheral Interface (SPI) bus is a synchronous serial communication protocol used for short-distance communication in embedded systems, enabling data transfer between microcontrollers and peripheral devices. It operates in full duplex mode and involves four key signals: MOSI, MISO, SCLK, and SS, allowing the master to communicate with one selected slave at a time. SPI offers advantages such as higher throughput and lower power requirements compared to I2C, but requires more pins and lacks formal standards for multi-master configurations.






















































![Communication_Protocols[2][1].pptx on protocoals](https://cdn.slidesharecdn.com/ss_thumbnails/communicationprotocols21-250429164707-38355411-thumbnail.jpg?width=640&height=640&fit=bounds)