This document explores the use of an Extended Kalman Filter (EKF) algorithm to accurately estimate the state of charge (SOC) of lithium-ion batteries under various operating conditions. The proposed second-order resistance-capacitance (RC) battery model combined with the EKF demonstrates significant improvements in SOC estimation accuracy, with errors ranging from 0.30% to 2.47%, outperforming conventional methods. The findings suggest that the EKF-based approach can enhance battery management and contribute to the development of more reliable energy storage systems.
![International Journal of Electrical and Computer Engineering (IJECE)
Vol. 14, No. 1, February 2024, pp. 57~65
ISSN: 2088-8708, DOI: 10.11591/ijece.v14i1.pp57-65 57
Journal homepage: http://ijece.iaescore.com
Reduce state of charge estimation errors with an extended
Kalman filter algorithm
Anas El Maliki1
, Abdessamad Benlafkih2
, Kamal Anoune3
, Abdelkader Hadjoudja1
1
Laboratory of Electronic Systems, Information Processing, Mechanics and Energetics, Faculty of Sciences, Ibn-Tofail University,
Kenitra, Morocco
2
Advanced Systems Engineering Laboratory, National School of Applied Sciences, Ibn-Tofail University, Kenitra, Morocco
3
SmartiLAB EMSI-Rabat, Honoris United Universities, Rabat, Morocco
Article Info ABSTRACT
Article history:
Received Feb 11, 2023
Revised Jul 28, 2023
Accepted Sep 6, 2023
Li-ion batteries (LiBs) are accurately estimated under varying operating
conditions and external influences using extended Kalman filtering (EKF).
Estimating the state of charge (SOC) is essential for enhancing battery
efficiency, though complexities and unpredictability present obstacles. To
address this issue, the paper proposes a second-order resistance-capacitance
(RC) battery model and derives the EKF algorithm from it. The EKF
approach is chosen for its ability to handle complex battery behaviors.
Through extensive evaluation using a Simulink MATLAB program, the
proposed EKF algorithm demonstrates remarkable accuracy and robustness
in SOC estimation. The root mean square error (RMSE) analysis shows that
SOC estimation errors range from only 0.30% to 2.47%, indicating
substantial improvement over conventional methods. These results
demonstrate the effectiveness of an EKF-based approach in overcoming
external influences and providing precise SOC estimations to optimize
battery management. In addition to enhancing battery performance, the
results of the study may lead to the development of more reliable energy
storage systems in the future. This will contribute to the wider adoption of
LiBs in various applications.
Keywords:
Energy storage
Equivalent circuit model
Extended Kalman filter
Lithium-ion battery
State of charge estimation
This is an open access article under the CC BY-SA license.
Corresponding Author:
Anas El Maliki
Laboratory of Electronic Systems, Information Processing, Mechanics and Energetics, Faculty of Sciences,
University Ibn Tofail
Kenitra, Morocco
Email: anas.elmaliki@uit.ac.ma
1. INTRODUCTION
Lithium-ion battery (LiB) applications in electric vehicles (EVs) have been growing rapidly [1], and
the need for high security and long life is more important than ever before. In aiming to overcome these
challenges, considerable effort has been put into providing an advanced battery management system (BMS),
which strongly relies upon battery state estimation [2]. Of the four states, the state of charge (SOC) remains
critical. However, it is not possible to directly measure the internal SOC. Only measurable signals, such as
the battery voltage and the load current, can be used to estimate this value. Therefore, to obtain a precise and
stable estimation of SOC, there is a need to set up a formal solution approach to reduce the negative impact
of uncertain measurements, such as both current and voltage noise. Any of these common problems can
directly impact the effectiveness and efficiency of estimating the SOC. There are three categories of SOC
estimation methods: open-circuit voltage (OCV) method, ampere-hour (Ah) method, and model-based
methods [3], [4].](https://image.slidesharecdn.com/0631840ijecedbd-240104022259-5f3f6f25/75/Reduce-state-of-charge-estimation-errors-with-an-extended-Kalman-filter-algorithm-1-2048.jpg)
![ ISSN: 2088-8708
Int J Elec & Comp Eng, Vol. 14, No. 1, February 2024: 57-65
58
As a result of the lack of an adjustment mechanism, the first two approaches are highly prone to
uncertainty in the measurements and will unavoidably fail as the measurement errors increase. Conversely,
model-based methods generally exhibit improved performance due to the use of a mechanism allowing
closed-loop feedback. The main approaches to model the dynamic behaviors of LIBs are the electrochemical
model (EM) [5], the equivalent circuit model (ECM) [6], and the data-driven model [7], [8].
The electrochemical model is very precise and capable of describing detailed transport and reaction
mechanisms; however, it is challenging to implement in real-time due to the high computation expense.
Instead, data-driven models, which include both artificial neural networks and fuzzy logic, tend to be very
efficient and do not require consideration of the mechanisms inherent in the process. However, they both
demand massive learning inputs, and the overall performance of generalization might not be tuned for the
unseen regions of operation. As opposed to the two, the ECM may provide a decent balance of model
accuracy and complexity, and as a result, it became the widest-applied model in the BMS.
Several approaches have been proposed to embed into the ECM in order to be able to accurately
estimate the SOC. Among them are the extended Kalman filter (EKF) [9], [10], sigma-point Kalman filter
(UKF) [11], [12], and cubature Kalman filter (CKF) [13], [14]. Out of these methods, the EKF method is the
most widely used due to its high accuracy and efficiency. However, the EKF algorithm's popularity for SOC
estimation doesn't negate the fact that its accuracy depends on both the battery model and system noise
variable priors [15]. Like other Kalman filters, the EKF relies on statistical models to represent uncertainties
in the system. One critical aspect is the specification of noise parameters in the prediction step of the filter. If
these noise parameters are not properly estimated or set, the EKF may not accurately account for the
uncertainties in the battery behavior, leading to inaccurate SOC predictions [16].
Several research studies have attempted to address the problem of measurement noise by improving
the precision of SOC estimations. Sun et al. proposed the use of smart adaptative extended Kalman filter
(AEKF) [17] and adaptative unscented Kalman filter (AUKF) [18] to estimate battery SOC by considering
noise. Maheshwari and Nageswari [19] combined the sunflower optimization algorithm (SFO) with a
machine learning model to improve SOC estimation performance using an adaptive Kalman filter, as
evidenced by the analysis of the error metric in the estimation results.
This paper first proposes an EKF algorithm that uses an equivalent circuit model, specifically a
second-order RC model. The methodology is focused on providing mathematical modeling of the given
lithium-ion battery (LiB) and The EKF algorithm. Afterward, these mathematical models are implemented
into the developed MATLAB program and then verified in the estimation procedure. Lastly, we set the noise
covariance parameters for the SOC estimation algorithm.
An organization for the remaining part of this paper is as outlined here: Section 2 provides an
introductory overview of the battery model, parameter identification, and a brief explanation of the EKF
algorithm EKF. Section 3 outlines the proposed model's implementation in a MATLAB program. Section 4
validates the proposed model through various simulation results related to the noise covariance parameters.
Section 5 summarizes the overall paper.
2. MATHEMATICAL MODELLING OF LIB
2.1. Battery model
A precise assessment of a battery's state of charge requires the use of an appropriate battery model.
The ECM [20], [21] is a commonly used model for assessing battery polarization phenomena due to its
consideration of electrochemical concentration and polarization. This makes it a convenient method for
determining these parameters.
The foundation shown in Figure 1 uses a second-order RC model to represent a battery's dynamic
behavior. This model is critical for understanding the battery’s responses to different conditions and inputs. It
enables precise study and prediction of battery performance, aiding optimization in various applications.
In this model, a schematic diagram represents internal components, including resistances and
capacitors. Internal resistance is marked as R0, reflecting inherent resistance within. RP1 and RP2 denote
resistances due to electrochemical and concentration polarizations, depicting how interactions occur with the
environment. Lastly, fractional capacitors, CP1 and CP2, correspond to electrochemical and concentration
polarizations respectively, illustrating energy storage components.
UOC is one of the SOC functions that indicates the voltage across the open circuit in an application. I
denotes the total current in a battery pack, essential for assessing its operational state. UL, UP1, and UP2
represent the terminal voltage of the battery pack and the voltages across CP1 and CP2 respectively, offering
insight into the voltage levels in various system components.
It can be shown that Kirchhoff's law is the basis of the circuit equations for this model, and the state
space equations that describe this model can be summarized as (1):](https://image.slidesharecdn.com/0631840ijecedbd-240104022259-5f3f6f25/75/Reduce-state-of-charge-estimation-errors-with-an-extended-Kalman-filter-algorithm-2-2048.jpg)
![Int J Elec & Comp Eng ISSN: 2088-8708
Reduce state of charge estimation errors with an extended Kalman filter algorithm (Anas El Maliki)
59
{
𝑈𝐿 = 𝑈𝑜𝑐 − 𝑈𝑝1 − 𝑈𝑝2 − 𝐼𝑅0
𝑈̇𝑝1 = −
1
𝐶𝑝1𝑅𝑝1
𝑈𝑝1 +
1
𝐶𝑝1
𝐼
𝑈̇𝑝2 = −
1
𝐶𝑝2𝑅𝑝2
𝑈𝑝2 +
1
𝐶𝑝2
𝐼
(1)
as a result, the state-space equations can be viewed as a matrix which can be summarized in (2):
{
[
𝑆𝑜𝑐𝑘+1
𝑈𝑝1,𝑘+1
𝑈𝑝2,𝑘+1
] = [
1 0 0
0 𝛼1 0
0 0 𝛼2
] [
𝑆𝑜𝑐𝑘
𝑈𝑝1,𝑘
𝑈𝑝2,𝑘
] + [
−Δ𝑡 𝐶𝑛
⁄
(1 − 𝛼1)𝑅𝑝1
(1 − 𝛼2)𝑅𝑝2
] 𝐼𝑘 + 𝓌𝑘
𝑈𝐿,𝑘 = 𝑈𝑜𝑐(𝑆𝑜𝑐𝑘) − 𝑈𝑝1,𝑘 − 𝑈𝑝2,𝑘 − 𝐼𝑘𝑅0 + 𝓋𝑘
(2)
where α𝑖 = exp (−∆𝑡 𝑅𝑝i𝐶𝑝i)
⁄ , ∆t denotes the time interval between consecutive measurements. The
variables 𝓌𝑘 and 𝓋𝑘 correspond to noise in the process and the measured noise, respectively.
Figure 1. Equivalent circuit model
3. METHOD
3.1. Method process flowchart
According to Figure 2, a proposed model's flow chart is structured in two parts. The first part is a
second-order RC model (2RC), which is based on an incoming load current that is used to calculate the SOC.
Within the input value, as well as the equation describing the model, we can simulate the terminal battery
voltage based on the 2RC model. The last part of the procedure is the EKF estimation. In this step, the EKF
algorithm utilizes the voltage values from the 2RC model and the observer battery voltage to estimate the
SOC of the battery.
The new European driving cycle (NEDC) [22] is utilized in the proposed model to simulate standard
driving conditions. It comprises various driving cycles to mimic typical urban and extra-urban environments
in Europe. This standard allows for the consistent comparison of emission levels and fuel consumption
between different vehicles.
3.2. Simulation inputs
In accordance with the hybrid pulse power characteristics (HPPC) methodology outlined in 2019
[23], it is established that the relationship between open circuit voltage (OCV) and SOC can be accurately
represented using a sixth-order polynomial curve. This polynomial curve serves as a comprehensive model to
describe the intricate connection between OCV and SOC, providing a valuable tool for predicting and
understanding the battery's behavior across its charge and discharge cycles. Such mathematical
representations are crucial in the field of battery management and energy storage system analysis.
𝑉
𝑜𝑐𝑣 = 𝑘0 + 𝑘1𝑆𝑜𝑐 + 𝑘2𝑆𝑜𝑐2
+ 𝑘3𝑆𝑜𝑐3
+ 𝑘4𝑆𝑜𝑐4
+ 𝑘5𝑆𝑜𝑐5
+ 𝑘6𝑆𝑜𝑐6
(3)
where, 𝑘0~6 parameters can be found in Table 1 [24].](https://image.slidesharecdn.com/0631840ijecedbd-240104022259-5f3f6f25/75/Reduce-state-of-charge-estimation-errors-with-an-extended-Kalman-filter-algorithm-3-2048.jpg)
![ ISSN: 2088-8708
Int J Elec & Comp Eng, Vol. 14, No. 1, February 2024: 57-65
60
Figure 2. The proposed method flowchart
Table 1. OCV-SOC fitting results at 25 °C
𝑘0 𝑘1 𝑘2 𝑘3 𝑘4 𝑘5 𝑘6
3.353 2.478 −9.902 19.01 −14.44 2.351 1.319
The proposed model's parameters can be ascertained utilizing the forgetting factor recursive least
squares (FFRLS) technique, as illustrated in Table 2 [25]. This method provides an efficient approach to
estimate the model parameters iteratively. The FFRLS approach ensures a continuous update of the
parameters, making it a robust choice for dynamic systems.
Table 2. Model parameters at 25°C
𝑅0(Ω) 𝑅𝑃1(Ω) 𝐶𝑃1(𝐹) 𝑅𝑃2(Ω) 𝐶𝑃2(𝐹)
0.01278 0.00792 524.53 0.05271 4346.76
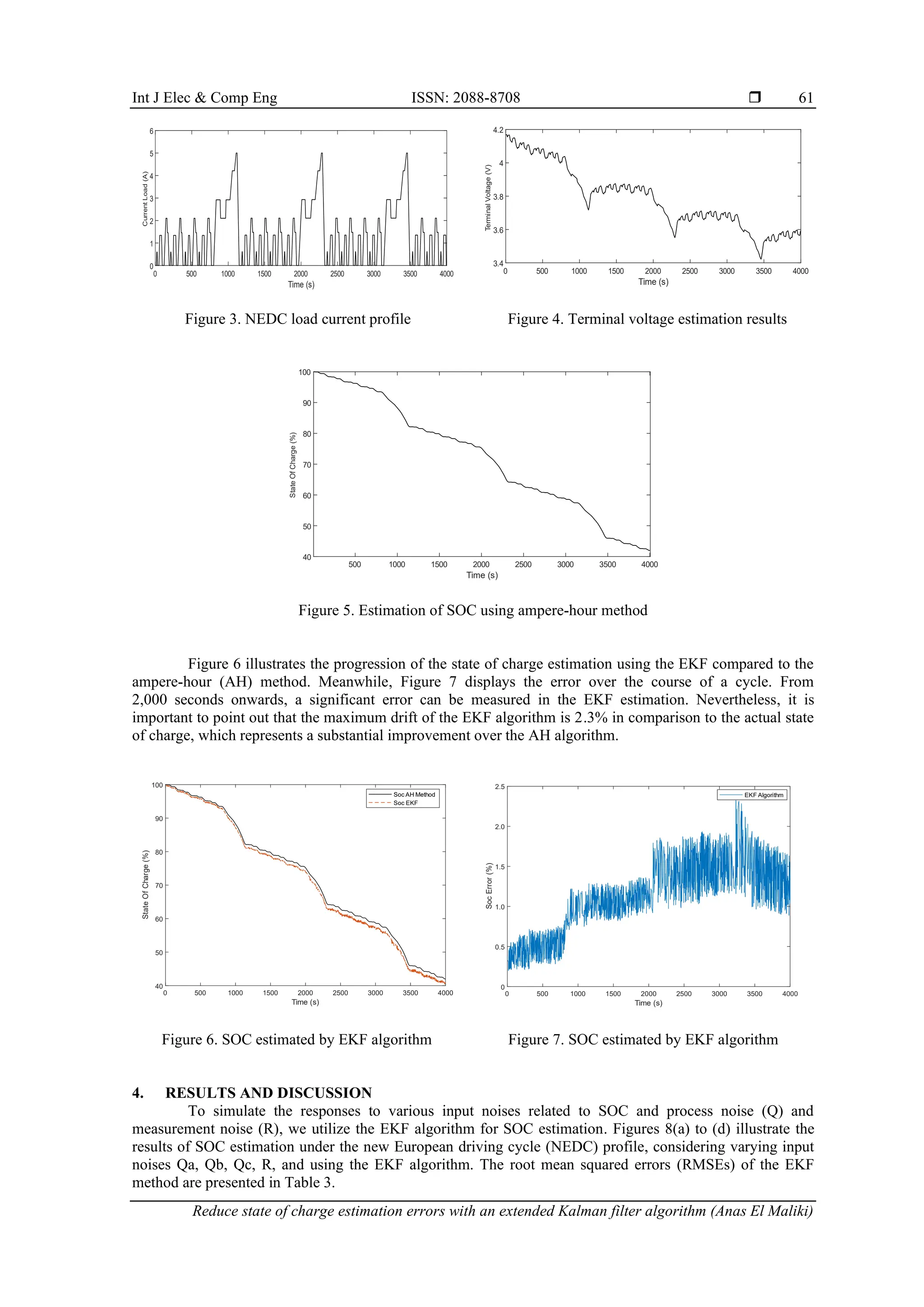
The 2RC battery model's simulation, using the NEDC as the current profile, is illustrated in
Figure 3. Figure 4 presents the terminal voltage estimation based on the key parameters provided in Table 2.
Lastly, Figure 5 displays the state of charge estimation, as determined by the empirical model.
The EKF algorithm is applied to our model to estimate the SOC, utilizing the initial covariance
matrix defined as (4) as an input parameter. The outcomes of this estimation are illustrated in Figure 6.
Figure 7 then portrays the corresponding errors in the SOC, providing a visual representation of the
discrepancies in the estimations.
𝑃0 = [
1𝑒−1
0 0
0 1𝑒−1
0
0 0 1𝑒−1
], 𝑄 = [
Qa 0 0
0 Qb 0
0 0 Qc
] = [
2𝑒−8
0 0
0 5𝑒−3
0
0 0 3𝑒−3
] , 𝑅 = 2𝑒−6
(4)](https://image.slidesharecdn.com/0631840ijecedbd-240104022259-5f3f6f25/75/Reduce-state-of-charge-estimation-errors-with-an-extended-Kalman-filter-algorithm-4-2048.jpg)
![Int J Elec & Comp Eng ISSN: 2088-8708
Reduce state of charge estimation errors with an extended Kalman filter algorithm (Anas El Maliki)
63
Table 4. RMSE of SOC estimation under max and min input noise
Input Noise Value Soc (RMSE %)
Max
𝑄𝑎 𝑚𝑎𝑥 2𝑒−1
0.0247 (2.47%)
𝑄𝑏 𝑚𝑎𝑥 1𝑒−3
𝑄𝑐 𝑚𝑎𝑥 3𝑒−3
𝑅𝑚𝑎𝑥 2𝑒−6
Min
𝑄𝑎 𝑚𝑖𝑛 2𝑒−8
0.0030 (0.30%)
𝑄𝑏 𝑚𝑖𝑛 5𝑒−1
𝑄𝑐 𝑚𝑖𝑛 3𝑒−1
𝑅𝑚𝑖𝑛 2𝑒−8
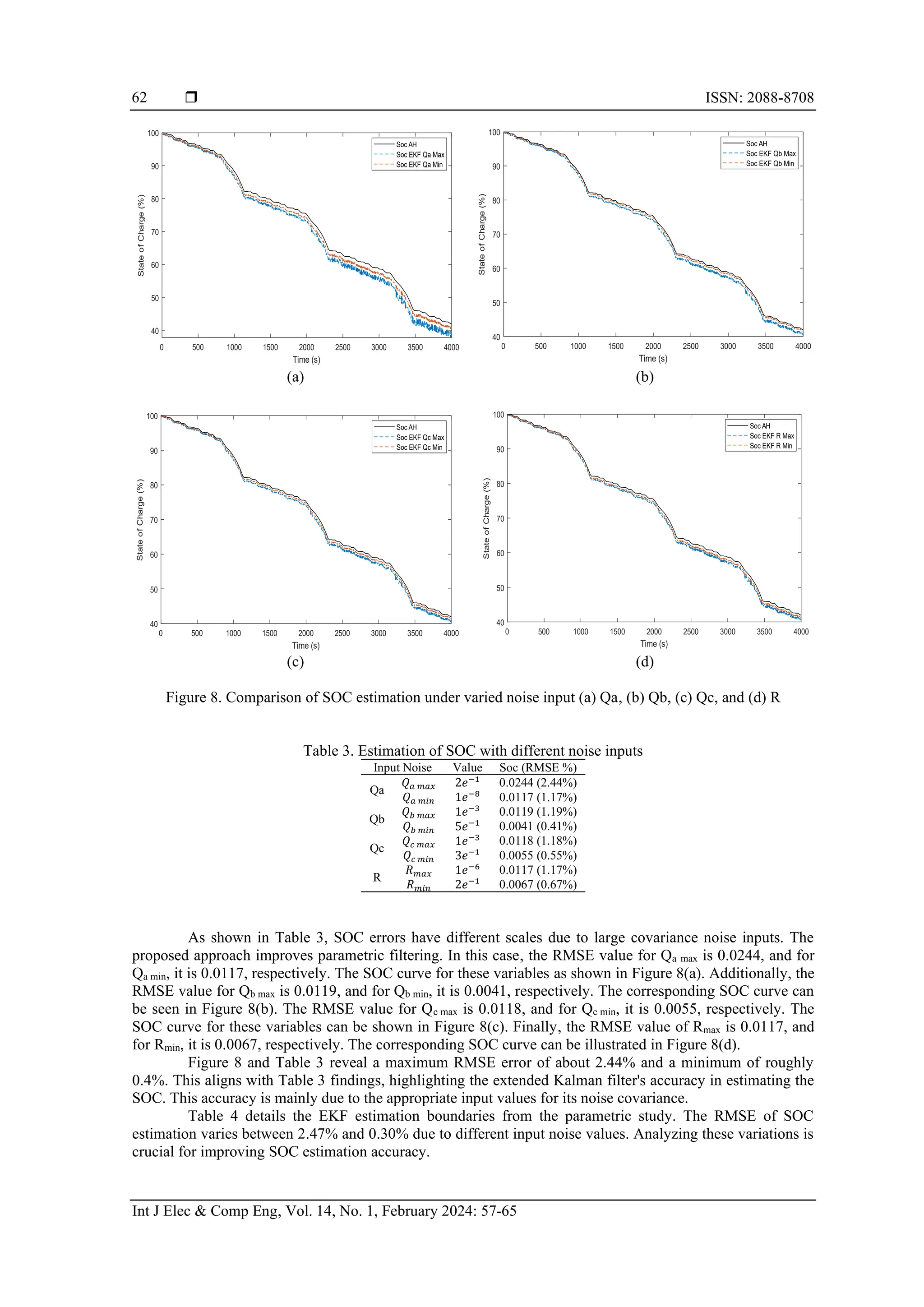
Examining Table 4, we observe that the EKF used in the proposed model falls within the range of
the min and max values of Qa, Qb, Qc, and R. Based on the subfigure shown in Figure 9, it appears that the
optimal EKF estimation error lies between the values of EKF Min and EKF Max. When applying the input
noise parameter from Table 4, the curves for SoC EKF, SoC EKF Min, and SoC EKF Max follow the same
pattern as shown in Figure 9. Additionally, the RMSE of the SOC estimation varies between 2.47% and
0.30% within the EKF boundaries. The EKF algorithm's optimal key noise values are Qa min = 2e−8
,
Qb min = 5e−1
, Qc min = 3e−1
, Rmin = 2e−8
, resulting in 0.30% errors during SOC estimation. Meanwhile,
Figure 10 displays the error over the course of a cycle.
Figure 9. SOC estimation results under maximum
and minimum estimation
Figure 10. SOC estimation results under maximum
and minimum estimation
5. CONCLUSION
This study proposes an EKF method for estimating the SOC of lithium-ion batteries (LiBs) using a
second-order RC network. The EKF algorithm is implemented in a MATLAB program developed as part of
the project. The mathematical model for the specific LiB is selected and integrated into the program.
Subsequently, the battery's behavior is represented using the second-order RC model.
Using different noise covariance matrix values, we simulated and verified our model to ensure its
accuracy and robustness. The proposed EKF algorithm demonstrated both accuracy and robustness in the
results. The RMSE of the estimated SOC ranged between 2.47% and 0.30%, depending on the studied input
noise values. Based on the aforementioned results, we can conclude that the optimal noise covariance matrix
values for our algorithm are as follows: 𝑄𝑎 𝑚𝑖𝑛 = 2𝑒−8
, 𝑄𝑏 𝑚𝑖𝑛 = 5𝑒−1
, 𝑄𝑐 𝑚𝑖𝑛 = 3𝑒−1
, 𝑅𝑚𝑖𝑛 = 2𝑒−8
.
Implementing these values will result in an estimation error of 0.30% when using the given algorithm.
REFERENCES
[1] J. Deng, C. Bae, A. Denlinger, and T. Miller, “Electric vehicles batteries: requirements and challenges,” Joule, vol. 4, no. 3,
pp. 511–515, Mar. 2020, doi: 10.1016/j.joule.2020.01.013.
[2] X. Hu, F. Feng, K. Liu, L. Zhang, J. Xie, and B. Liu, “State estimation for advanced battery management: key chllaenges and
future trends,” Renewable and Sustainable Energy Reviews, vol. 114, Oct. 2019, doi: 10.1016/j.rser.2019.109334.
[3] J. Meng et al., “An overview and comparison of online implementable SOC estimation methods for lithium-ion battery,” IEEE
Transactions on Industry Applications, vol. 54, no. 2, pp. 1583–1591, Mar. 2018, doi: 10.1109/TIA.2017.2775179.
[4] W. Xu et al., “A novel adaptive dual extended Kalman filtering algorithm for the Li-ion battery state of charge and state of health
co-estimation,” International Journal of Energy Research, vol. 45, no. 10, pp. 14592–14602, Apr. 2021, doi: 10.1002/er.6719.
[5] J. Shen, Q. Wang, G. Zhao, Z. Ma, and Y. He, “A joint moving horizon strategy for state-of-charge estimation of lithium-ion batteries
under combined measurement uncertainty,” Journal of Energy Storage, vol. 44, Dec. 2021, doi: 10.1016/j.est.2021.103316.](https://image.slidesharecdn.com/0631840ijecedbd-240104022259-5f3f6f25/75/Reduce-state-of-charge-estimation-errors-with-an-extended-Kalman-filter-algorithm-7-2048.jpg)
![ ISSN: 2088-8708
Int J Elec & Comp Eng, Vol. 14, No. 1, February 2024: 57-65
64
[6] X. Hu, S. Li, and H. Peng, “A comparative study of equivalent circuit models for Li-ion batteries,” Journal of Power Sources,
vol. 198, pp. 359–367, Jan. 2012, doi: 10.1016/j.jpowsour.2011.10.013.
[7] M. S. Hossain Lipu et al., “Data-driven state of charge estimation of lithium-ion batteries: algorithms, implementation factors,
limitations and future trends,” Journal of Cleaner Production, vol. 277, Dec. 2020, doi: 10.1016/j.jclepro.2020.124110.
[8] Y. Boujoudar, H. Elmoussaoui, and T. Lamhamdi, “Lithium-ion batteries modeling and state of charge estimation using artificial
neural network,” International Journal of Electrical and Computer Engineering (IJECE), vol. 9, no. 5, pp. 3415–3422, Oct. 2019,
doi: 10.11591/ijece.v9i5.pp3415-3422.
[9] G. L. Plett, “Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs - Part 2. Modeling and
identification,” Journal of Power Sources, vol. 134, no. 2, pp. 262–276, Aug. 2004, doi: 10.1016/j.jpowsour.2004.02.032.
[10] G. L. Plett, “Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs - Part 3. State and
parameter estimation,” Journal of Power Sources, vol. 134, no. 2, pp. 277–292, Aug. 2004, doi: 10.1016/j.jpowsour.2004.02.033.
[11] G. L. Plett, “Sigma-point Kalman filtering for battery management systems of LiPB-based HEV battery packs. Part 1: Introduction
and state estimation,” Journal of Power Sources, vol. 161, no. 2, pp. 1356–1368, Oct. 2006, doi: 10.1016/j.jpowsour.2006.06.003.
[12] G. L. Plett, “Sigma-point Kalman filtering for battery management systems of LiPB-based HEV battery packs. Part 2:
Simultaneous state and parameter estimation,” Journal of Power Sources, vol. 161, no. 2, pp. 1369–1384, Oct. 2006, doi:
10.1016/j.jpowsour.2006.06.004.
[13] J. Luo, J. Peng, and H. He, “Lithium-ion battery SOC estimation study based on Cubature Kalman filter,” Energy Procedia,
vol. 158, pp. 3421–3426, Feb. 2019, doi: 10.1016/j.egypro.2019.01.933.
[14] I. Arasaratnam and S. Haykin, “Cubature kalman filters,” IEEE Transactions on Automatic Control, vol. 54, no. 6,
pp. 1254–1269, Jun. 2009, doi: 10.1109/TAC.2009.2019800.
[15] C. Huang, Z. Wang, Z. Zhao, L. Wang, C. S. Lai, and D. Wang, “Robustness evaluation of extended and unscented Kalman filter
for battery state of charge estimation,” IEEE Access, vol. 6, pp. 27617–27628, 2018, doi: 10.1109/ACCESS.2018.2833858.
[16] R. Xiong, J. Cao, Q. Yu, H. He, and F. Sun, “Critical review on the battery state of charge estimation methods for electric
vehicles,” IEEE Access, vol. 6, pp. 1832–1843, 2017, doi: 10.1109/ACCESS.2017.2780258.
[17] D. Sun et al., “State of charge estimation for lithium-ion battery based on an intelligent adaptive extended Kalman filter with
improved noise estimator,” Energy, vol. 214, Jan. 2021, doi: 10.1016/j.energy.2020.119025.
[18] D. Sun, X. Yu, C. Zhang, C. Wang, and R. Huang, “State of charge estimation for lithium-ion battery based on an intelligent adaptive
unscented Kalman filter,” International Journal of Energy Research, vol. 44, no. 14, pp. 11199–11218, 2020, doi: 10.1002/er.5690.
[19] A. Maheshwari and S. Nageswari, “Real-time state of charge estimation for electric vehicle power batteries using optimized
filter,” Energy, vol. 254, Sep. 2022, doi: 10.1016/j.energy.2022.124328.
[20] M.-K. Tran, A. Mevawala, S. Panchal, K. Raahemifar, M. Fowler, and R. Fraser, “Effect of integrating the hysteresis component
to the equivalent circuit model of Lithium-ion battery for dynamic and non-dynamic applications,” Journal of Energy Storage,
vol. 32, Dec. 2020, doi: 10.1016/j.est.2020.101785.
[21] X. Lai, Y. Zheng, and T. Sun, “A comparative study of different equivalent circuit models for estimating state-of-charge of
lithium-ion batteries,” Electrochimica Acta, vol. 259, pp. 566–577, Jan. 2018, doi: 10.1016/j.electacta.2017.10.153.
[22] H. Jbari, R. Askour, and B. B. Idrissi, “Fuzzy logic-based energy management strategy on dual-source hybridization for a pure
electric vehicle,” International Journal of Electrical and Computer Engineering, vol. 12, no. 5, pp. 4903–4914, Oct. 2022,
doi: 10.11591/ijece.v12i5.pp4903-4914.
[23] J. Peng, J. Luo, H. He, and B. Lu, “An improved state of charge estimation method based on cubature Kalman filter for lithium-
ion batteries,” Applied Energy, vol. 253, Nov. 2019, doi: 10.1016/j.apenergy.2019.113520.
[24] Z. He et al., “State-of-charge estimation of lithium ion batteries based on adaptive iterative extended Kalman filter,” Journal of
Energy Storage, vol. 39, Jul. 2021, doi: 10.1016/j.est.2021.102593.
[25] Z. Zhang, L. Jiang, L. Zhang, and C. Huang, “State-of-charge estimation of lithium-ion battery pack by using an adaptive
extended Kalman filter for electric vehicles,” Journal of Energy Storage, vol. 37, May 2021, doi: 10.1016/j.est.2021.102457.
BIOGRAPHIES OF AUTHORS
Anas El Maliki received a B.S degree in fundamental physics studies from
Mohammed V University of Rabat, in 2014 and an M.S. degree in physics and new
technology from Hassan II University of Casablanca, in 2017. Currently working toward a
Ph.D. degree in energy storage and sustainable energy at Ibn Tofail University Kenitra. He can
be contacted at email: anas.elmaliki@uit.ac.ma.
Abdessamad Benlafkih received the B.S. and M.S. degrees, from the University
of Sciences Dhar El Mehraz Fez, In 1997 and 2003, respectively. And the Ph.D. degree in
electrical engineering from the University Ibn Tofail Kenitra in 2015. He was a teacher in the
secondary cycle from 2004 to 2020. And in 2020, He has been a professor of electrical power
engineering at University Ibn Tofail Kenitra Morocco. He can be contacted at email:
abdessamad.benlafkih@uit.ac.ma.](https://image.slidesharecdn.com/0631840ijecedbd-240104022259-5f3f6f25/75/Reduce-state-of-charge-estimation-errors-with-an-extended-Kalman-filter-algorithm-8-2048.jpg)

![International Journal of Electrical and Computer Engineering (IJECE)
Vol. 14, No. 1, February 2024, pp. 57~65
ISSN: 2088-8708, DOI: 10.11591/ijece.v14i1.pp57-65 57
Journal homepage: http://ijece.iaescore.com
Reduce state of charge estimation errors with an extended
Kalman filter algorithm
Anas El Maliki1
, Abdessamad Benlafkih2
, Kamal Anoune3
, Abdelkader Hadjoudja1
1
Laboratory of Electronic Systems, Information Processing, Mechanics and Energetics, Faculty of Sciences, Ibn-Tofail University,
Kenitra, Morocco
2
Advanced Systems Engineering Laboratory, National School of Applied Sciences, Ibn-Tofail University, Kenitra, Morocco
3
SmartiLAB EMSI-Rabat, Honoris United Universities, Rabat, Morocco
Article Info ABSTRACT
Article history:
Received Feb 11, 2023
Revised Jul 28, 2023
Accepted Sep 6, 2023
Li-ion batteries (LiBs) are accurately estimated under varying operating
conditions and external influences using extended Kalman filtering (EKF).
Estimating the state of charge (SOC) is essential for enhancing battery
efficiency, though complexities and unpredictability present obstacles. To
address this issue, the paper proposes a second-order resistance-capacitance
(RC) battery model and derives the EKF algorithm from it. The EKF
approach is chosen for its ability to handle complex battery behaviors.
Through extensive evaluation using a Simulink MATLAB program, the
proposed EKF algorithm demonstrates remarkable accuracy and robustness
in SOC estimation. The root mean square error (RMSE) analysis shows that
SOC estimation errors range from only 0.30% to 2.47%, indicating
substantial improvement over conventional methods. These results
demonstrate the effectiveness of an EKF-based approach in overcoming
external influences and providing precise SOC estimations to optimize
battery management. In addition to enhancing battery performance, the
results of the study may lead to the development of more reliable energy
storage systems in the future. This will contribute to the wider adoption of
LiBs in various applications.
Keywords:
Energy storage
Equivalent circuit model
Extended Kalman filter
Lithium-ion battery
State of charge estimation
This is an open access article under the CC BY-SA license.
Corresponding Author:
Anas El Maliki
Laboratory of Electronic Systems, Information Processing, Mechanics and Energetics, Faculty of Sciences,
University Ibn Tofail
Kenitra, Morocco
Email: anas.elmaliki@uit.ac.ma
1. INTRODUCTION
Lithium-ion battery (LiB) applications in electric vehicles (EVs) have been growing rapidly [1], and
the need for high security and long life is more important than ever before. In aiming to overcome these
challenges, considerable effort has been put into providing an advanced battery management system (BMS),
which strongly relies upon battery state estimation [2]. Of the four states, the state of charge (SOC) remains
critical. However, it is not possible to directly measure the internal SOC. Only measurable signals, such as
the battery voltage and the load current, can be used to estimate this value. Therefore, to obtain a precise and
stable estimation of SOC, there is a need to set up a formal solution approach to reduce the negative impact
of uncertain measurements, such as both current and voltage noise. Any of these common problems can
directly impact the effectiveness and efficiency of estimating the SOC. There are three categories of SOC
estimation methods: open-circuit voltage (OCV) method, ampere-hour (Ah) method, and model-based
methods [3], [4].](https://crownmelresort.com/image.slidesharecdn.com/0631840ijecedbd-240104022259-5f3f6f25/75/Reduce-state-of-charge-estimation-errors-with-an-extended-Kalman-filter-algorithm-1-2048.jpg)
![ ISSN: 2088-8708
Int J Elec & Comp Eng, Vol. 14, No. 1, February 2024: 57-65
58
As a result of the lack of an adjustment mechanism, the first two approaches are highly prone to
uncertainty in the measurements and will unavoidably fail as the measurement errors increase. Conversely,
model-based methods generally exhibit improved performance due to the use of a mechanism allowing
closed-loop feedback. The main approaches to model the dynamic behaviors of LIBs are the electrochemical
model (EM) [5], the equivalent circuit model (ECM) [6], and the data-driven model [7], [8].
The electrochemical model is very precise and capable of describing detailed transport and reaction
mechanisms; however, it is challenging to implement in real-time due to the high computation expense.
Instead, data-driven models, which include both artificial neural networks and fuzzy logic, tend to be very
efficient and do not require consideration of the mechanisms inherent in the process. However, they both
demand massive learning inputs, and the overall performance of generalization might not be tuned for the
unseen regions of operation. As opposed to the two, the ECM may provide a decent balance of model
accuracy and complexity, and as a result, it became the widest-applied model in the BMS.
Several approaches have been proposed to embed into the ECM in order to be able to accurately
estimate the SOC. Among them are the extended Kalman filter (EKF) [9], [10], sigma-point Kalman filter
(UKF) [11], [12], and cubature Kalman filter (CKF) [13], [14]. Out of these methods, the EKF method is the
most widely used due to its high accuracy and efficiency. However, the EKF algorithm's popularity for SOC
estimation doesn't negate the fact that its accuracy depends on both the battery model and system noise
variable priors [15]. Like other Kalman filters, the EKF relies on statistical models to represent uncertainties
in the system. One critical aspect is the specification of noise parameters in the prediction step of the filter. If
these noise parameters are not properly estimated or set, the EKF may not accurately account for the
uncertainties in the battery behavior, leading to inaccurate SOC predictions [16].
Several research studies have attempted to address the problem of measurement noise by improving
the precision of SOC estimations. Sun et al. proposed the use of smart adaptative extended Kalman filter
(AEKF) [17] and adaptative unscented Kalman filter (AUKF) [18] to estimate battery SOC by considering
noise. Maheshwari and Nageswari [19] combined the sunflower optimization algorithm (SFO) with a
machine learning model to improve SOC estimation performance using an adaptive Kalman filter, as
evidenced by the analysis of the error metric in the estimation results.
This paper first proposes an EKF algorithm that uses an equivalent circuit model, specifically a
second-order RC model. The methodology is focused on providing mathematical modeling of the given
lithium-ion battery (LiB) and The EKF algorithm. Afterward, these mathematical models are implemented
into the developed MATLAB program and then verified in the estimation procedure. Lastly, we set the noise
covariance parameters for the SOC estimation algorithm.
An organization for the remaining part of this paper is as outlined here: Section 2 provides an
introductory overview of the battery model, parameter identification, and a brief explanation of the EKF
algorithm EKF. Section 3 outlines the proposed model's implementation in a MATLAB program. Section 4
validates the proposed model through various simulation results related to the noise covariance parameters.
Section 5 summarizes the overall paper.
2. MATHEMATICAL MODELLING OF LIB
2.1. Battery model
A precise assessment of a battery's state of charge requires the use of an appropriate battery model.
The ECM [20], [21] is a commonly used model for assessing battery polarization phenomena due to its
consideration of electrochemical concentration and polarization. This makes it a convenient method for
determining these parameters.
The foundation shown in Figure 1 uses a second-order RC model to represent a battery's dynamic
behavior. This model is critical for understanding the battery’s responses to different conditions and inputs. It
enables precise study and prediction of battery performance, aiding optimization in various applications.
In this model, a schematic diagram represents internal components, including resistances and
capacitors. Internal resistance is marked as R0, reflecting inherent resistance within. RP1 and RP2 denote
resistances due to electrochemical and concentration polarizations, depicting how interactions occur with the
environment. Lastly, fractional capacitors, CP1 and CP2, correspond to electrochemical and concentration
polarizations respectively, illustrating energy storage components.
UOC is one of the SOC functions that indicates the voltage across the open circuit in an application. I
denotes the total current in a battery pack, essential for assessing its operational state. UL, UP1, and UP2
represent the terminal voltage of the battery pack and the voltages across CP1 and CP2 respectively, offering
insight into the voltage levels in various system components.
It can be shown that Kirchhoff's law is the basis of the circuit equations for this model, and the state
space equations that describe this model can be summarized as (1):](https://crownmelresort.com/image.slidesharecdn.com/0631840ijecedbd-240104022259-5f3f6f25/75/Reduce-state-of-charge-estimation-errors-with-an-extended-Kalman-filter-algorithm-2-2048.jpg)
![Int J Elec & Comp Eng ISSN: 2088-8708
Reduce state of charge estimation errors with an extended Kalman filter algorithm (Anas El Maliki)
59
{
𝑈𝐿 = 𝑈𝑜𝑐 − 𝑈𝑝1 − 𝑈𝑝2 − 𝐼𝑅0
𝑈̇𝑝1 = −
1
𝐶𝑝1𝑅𝑝1
𝑈𝑝1 +
1
𝐶𝑝1
𝐼
𝑈̇𝑝2 = −
1
𝐶𝑝2𝑅𝑝2
𝑈𝑝2 +
1
𝐶𝑝2
𝐼
(1)
as a result, the state-space equations can be viewed as a matrix which can be summarized in (2):
{
[
𝑆𝑜𝑐𝑘+1
𝑈𝑝1,𝑘+1
𝑈𝑝2,𝑘+1
] = [
1 0 0
0 𝛼1 0
0 0 𝛼2
] [
𝑆𝑜𝑐𝑘
𝑈𝑝1,𝑘
𝑈𝑝2,𝑘
] + [
−Δ𝑡 𝐶𝑛
⁄
(1 − 𝛼1)𝑅𝑝1
(1 − 𝛼2)𝑅𝑝2
] 𝐼𝑘 + 𝓌𝑘
𝑈𝐿,𝑘 = 𝑈𝑜𝑐(𝑆𝑜𝑐𝑘) − 𝑈𝑝1,𝑘 − 𝑈𝑝2,𝑘 − 𝐼𝑘𝑅0 + 𝓋𝑘
(2)
where α𝑖 = exp (−∆𝑡 𝑅𝑝i𝐶𝑝i)
⁄ , ∆t denotes the time interval between consecutive measurements. The
variables 𝓌𝑘 and 𝓋𝑘 correspond to noise in the process and the measured noise, respectively.
Figure 1. Equivalent circuit model
3. METHOD
3.1. Method process flowchart
According to Figure 2, a proposed model's flow chart is structured in two parts. The first part is a
second-order RC model (2RC), which is based on an incoming load current that is used to calculate the SOC.
Within the input value, as well as the equation describing the model, we can simulate the terminal battery
voltage based on the 2RC model. The last part of the procedure is the EKF estimation. In this step, the EKF
algorithm utilizes the voltage values from the 2RC model and the observer battery voltage to estimate the
SOC of the battery.
The new European driving cycle (NEDC) [22] is utilized in the proposed model to simulate standard
driving conditions. It comprises various driving cycles to mimic typical urban and extra-urban environments
in Europe. This standard allows for the consistent comparison of emission levels and fuel consumption
between different vehicles.
3.2. Simulation inputs
In accordance with the hybrid pulse power characteristics (HPPC) methodology outlined in 2019
[23], it is established that the relationship between open circuit voltage (OCV) and SOC can be accurately
represented using a sixth-order polynomial curve. This polynomial curve serves as a comprehensive model to
describe the intricate connection between OCV and SOC, providing a valuable tool for predicting and
understanding the battery's behavior across its charge and discharge cycles. Such mathematical
representations are crucial in the field of battery management and energy storage system analysis.
𝑉
𝑜𝑐𝑣 = 𝑘0 + 𝑘1𝑆𝑜𝑐 + 𝑘2𝑆𝑜𝑐2
+ 𝑘3𝑆𝑜𝑐3
+ 𝑘4𝑆𝑜𝑐4
+ 𝑘5𝑆𝑜𝑐5
+ 𝑘6𝑆𝑜𝑐6
(3)
where, 𝑘0~6 parameters can be found in Table 1 [24].](https://crownmelresort.com/image.slidesharecdn.com/0631840ijecedbd-240104022259-5f3f6f25/75/Reduce-state-of-charge-estimation-errors-with-an-extended-Kalman-filter-algorithm-3-2048.jpg)
![ ISSN: 2088-8708
Int J Elec & Comp Eng, Vol. 14, No. 1, February 2024: 57-65
60
Figure 2. The proposed method flowchart
Table 1. OCV-SOC fitting results at 25 °C
𝑘0 𝑘1 𝑘2 𝑘3 𝑘4 𝑘5 𝑘6
3.353 2.478 −9.902 19.01 −14.44 2.351 1.319
The proposed model's parameters can be ascertained utilizing the forgetting factor recursive least
squares (FFRLS) technique, as illustrated in Table 2 [25]. This method provides an efficient approach to
estimate the model parameters iteratively. The FFRLS approach ensures a continuous update of the
parameters, making it a robust choice for dynamic systems.
Table 2. Model parameters at 25°C
𝑅0(Ω) 𝑅𝑃1(Ω) 𝐶𝑃1(𝐹) 𝑅𝑃2(Ω) 𝐶𝑃2(𝐹)
0.01278 0.00792 524.53 0.05271 4346.76
The 2RC battery model's simulation, using the NEDC as the current profile, is illustrated in
Figure 3. Figure 4 presents the terminal voltage estimation based on the key parameters provided in Table 2.
Lastly, Figure 5 displays the state of charge estimation, as determined by the empirical model.
The EKF algorithm is applied to our model to estimate the SOC, utilizing the initial covariance
matrix defined as (4) as an input parameter. The outcomes of this estimation are illustrated in Figure 6.
Figure 7 then portrays the corresponding errors in the SOC, providing a visual representation of the
discrepancies in the estimations.
𝑃0 = [
1𝑒−1
0 0
0 1𝑒−1
0
0 0 1𝑒−1
], 𝑄 = [
Qa 0 0
0 Qb 0
0 0 Qc
] = [
2𝑒−8
0 0
0 5𝑒−3
0
0 0 3𝑒−3
] , 𝑅 = 2𝑒−6
(4)](https://crownmelresort.com/image.slidesharecdn.com/0631840ijecedbd-240104022259-5f3f6f25/75/Reduce-state-of-charge-estimation-errors-with-an-extended-Kalman-filter-algorithm-4-2048.jpg)


![Int J Elec & Comp Eng ISSN: 2088-8708
Reduce state of charge estimation errors with an extended Kalman filter algorithm (Anas El Maliki)
63
Table 4. RMSE of SOC estimation under max and min input noise
Input Noise Value Soc (RMSE %)
Max
𝑄𝑎 𝑚𝑎𝑥 2𝑒−1
0.0247 (2.47%)
𝑄𝑏 𝑚𝑎𝑥 1𝑒−3
𝑄𝑐 𝑚𝑎𝑥 3𝑒−3
𝑅𝑚𝑎𝑥 2𝑒−6
Min
𝑄𝑎 𝑚𝑖𝑛 2𝑒−8
0.0030 (0.30%)
𝑄𝑏 𝑚𝑖𝑛 5𝑒−1
𝑄𝑐 𝑚𝑖𝑛 3𝑒−1
𝑅𝑚𝑖𝑛 2𝑒−8
Examining Table 4, we observe that the EKF used in the proposed model falls within the range of
the min and max values of Qa, Qb, Qc, and R. Based on the subfigure shown in Figure 9, it appears that the
optimal EKF estimation error lies between the values of EKF Min and EKF Max. When applying the input
noise parameter from Table 4, the curves for SoC EKF, SoC EKF Min, and SoC EKF Max follow the same
pattern as shown in Figure 9. Additionally, the RMSE of the SOC estimation varies between 2.47% and
0.30% within the EKF boundaries. The EKF algorithm's optimal key noise values are Qa min = 2e−8
,
Qb min = 5e−1
, Qc min = 3e−1
, Rmin = 2e−8
, resulting in 0.30% errors during SOC estimation. Meanwhile,
Figure 10 displays the error over the course of a cycle.
Figure 9. SOC estimation results under maximum
and minimum estimation
Figure 10. SOC estimation results under maximum
and minimum estimation
5. CONCLUSION
This study proposes an EKF method for estimating the SOC of lithium-ion batteries (LiBs) using a
second-order RC network. The EKF algorithm is implemented in a MATLAB program developed as part of
the project. The mathematical model for the specific LiB is selected and integrated into the program.
Subsequently, the battery's behavior is represented using the second-order RC model.
Using different noise covariance matrix values, we simulated and verified our model to ensure its
accuracy and robustness. The proposed EKF algorithm demonstrated both accuracy and robustness in the
results. The RMSE of the estimated SOC ranged between 2.47% and 0.30%, depending on the studied input
noise values. Based on the aforementioned results, we can conclude that the optimal noise covariance matrix
values for our algorithm are as follows: 𝑄𝑎 𝑚𝑖𝑛 = 2𝑒−8
, 𝑄𝑏 𝑚𝑖𝑛 = 5𝑒−1
, 𝑄𝑐 𝑚𝑖𝑛 = 3𝑒−1
, 𝑅𝑚𝑖𝑛 = 2𝑒−8
.
Implementing these values will result in an estimation error of 0.30% when using the given algorithm.
REFERENCES
[1] J. Deng, C. Bae, A. Denlinger, and T. Miller, “Electric vehicles batteries: requirements and challenges,” Joule, vol. 4, no. 3,
pp. 511–515, Mar. 2020, doi: 10.1016/j.joule.2020.01.013.
[2] X. Hu, F. Feng, K. Liu, L. Zhang, J. Xie, and B. Liu, “State estimation for advanced battery management: key chllaenges and
future trends,” Renewable and Sustainable Energy Reviews, vol. 114, Oct. 2019, doi: 10.1016/j.rser.2019.109334.
[3] J. Meng et al., “An overview and comparison of online implementable SOC estimation methods for lithium-ion battery,” IEEE
Transactions on Industry Applications, vol. 54, no. 2, pp. 1583–1591, Mar. 2018, doi: 10.1109/TIA.2017.2775179.
[4] W. Xu et al., “A novel adaptive dual extended Kalman filtering algorithm for the Li-ion battery state of charge and state of health
co-estimation,” International Journal of Energy Research, vol. 45, no. 10, pp. 14592–14602, Apr. 2021, doi: 10.1002/er.6719.
[5] J. Shen, Q. Wang, G. Zhao, Z. Ma, and Y. He, “A joint moving horizon strategy for state-of-charge estimation of lithium-ion batteries
under combined measurement uncertainty,” Journal of Energy Storage, vol. 44, Dec. 2021, doi: 10.1016/j.est.2021.103316.](https://crownmelresort.com/image.slidesharecdn.com/0631840ijecedbd-240104022259-5f3f6f25/75/Reduce-state-of-charge-estimation-errors-with-an-extended-Kalman-filter-algorithm-7-2048.jpg)
![ ISSN: 2088-8708
Int J Elec & Comp Eng, Vol. 14, No. 1, February 2024: 57-65
64
[6] X. Hu, S. Li, and H. Peng, “A comparative study of equivalent circuit models for Li-ion batteries,” Journal of Power Sources,
vol. 198, pp. 359–367, Jan. 2012, doi: 10.1016/j.jpowsour.2011.10.013.
[7] M. S. Hossain Lipu et al., “Data-driven state of charge estimation of lithium-ion batteries: algorithms, implementation factors,
limitations and future trends,” Journal of Cleaner Production, vol. 277, Dec. 2020, doi: 10.1016/j.jclepro.2020.124110.
[8] Y. Boujoudar, H. Elmoussaoui, and T. Lamhamdi, “Lithium-ion batteries modeling and state of charge estimation using artificial
neural network,” International Journal of Electrical and Computer Engineering (IJECE), vol. 9, no. 5, pp. 3415–3422, Oct. 2019,
doi: 10.11591/ijece.v9i5.pp3415-3422.
[9] G. L. Plett, “Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs - Part 2. Modeling and
identification,” Journal of Power Sources, vol. 134, no. 2, pp. 262–276, Aug. 2004, doi: 10.1016/j.jpowsour.2004.02.032.
[10] G. L. Plett, “Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs - Part 3. State and
parameter estimation,” Journal of Power Sources, vol. 134, no. 2, pp. 277–292, Aug. 2004, doi: 10.1016/j.jpowsour.2004.02.033.
[11] G. L. Plett, “Sigma-point Kalman filtering for battery management systems of LiPB-based HEV battery packs. Part 1: Introduction
and state estimation,” Journal of Power Sources, vol. 161, no. 2, pp. 1356–1368, Oct. 2006, doi: 10.1016/j.jpowsour.2006.06.003.
[12] G. L. Plett, “Sigma-point Kalman filtering for battery management systems of LiPB-based HEV battery packs. Part 2:
Simultaneous state and parameter estimation,” Journal of Power Sources, vol. 161, no. 2, pp. 1369–1384, Oct. 2006, doi:
10.1016/j.jpowsour.2006.06.004.
[13] J. Luo, J. Peng, and H. He, “Lithium-ion battery SOC estimation study based on Cubature Kalman filter,” Energy Procedia,
vol. 158, pp. 3421–3426, Feb. 2019, doi: 10.1016/j.egypro.2019.01.933.
[14] I. Arasaratnam and S. Haykin, “Cubature kalman filters,” IEEE Transactions on Automatic Control, vol. 54, no. 6,
pp. 1254–1269, Jun. 2009, doi: 10.1109/TAC.2009.2019800.
[15] C. Huang, Z. Wang, Z. Zhao, L. Wang, C. S. Lai, and D. Wang, “Robustness evaluation of extended and unscented Kalman filter
for battery state of charge estimation,” IEEE Access, vol. 6, pp. 27617–27628, 2018, doi: 10.1109/ACCESS.2018.2833858.
[16] R. Xiong, J. Cao, Q. Yu, H. He, and F. Sun, “Critical review on the battery state of charge estimation methods for electric
vehicles,” IEEE Access, vol. 6, pp. 1832–1843, 2017, doi: 10.1109/ACCESS.2017.2780258.
[17] D. Sun et al., “State of charge estimation for lithium-ion battery based on an intelligent adaptive extended Kalman filter with
improved noise estimator,” Energy, vol. 214, Jan. 2021, doi: 10.1016/j.energy.2020.119025.
[18] D. Sun, X. Yu, C. Zhang, C. Wang, and R. Huang, “State of charge estimation for lithium-ion battery based on an intelligent adaptive
unscented Kalman filter,” International Journal of Energy Research, vol. 44, no. 14, pp. 11199–11218, 2020, doi: 10.1002/er.5690.
[19] A. Maheshwari and S. Nageswari, “Real-time state of charge estimation for electric vehicle power batteries using optimized
filter,” Energy, vol. 254, Sep. 2022, doi: 10.1016/j.energy.2022.124328.
[20] M.-K. Tran, A. Mevawala, S. Panchal, K. Raahemifar, M. Fowler, and R. Fraser, “Effect of integrating the hysteresis component
to the equivalent circuit model of Lithium-ion battery for dynamic and non-dynamic applications,” Journal of Energy Storage,
vol. 32, Dec. 2020, doi: 10.1016/j.est.2020.101785.
[21] X. Lai, Y. Zheng, and T. Sun, “A comparative study of different equivalent circuit models for estimating state-of-charge of
lithium-ion batteries,” Electrochimica Acta, vol. 259, pp. 566–577, Jan. 2018, doi: 10.1016/j.electacta.2017.10.153.
[22] H. Jbari, R. Askour, and B. B. Idrissi, “Fuzzy logic-based energy management strategy on dual-source hybridization for a pure
electric vehicle,” International Journal of Electrical and Computer Engineering, vol. 12, no. 5, pp. 4903–4914, Oct. 2022,
doi: 10.11591/ijece.v12i5.pp4903-4914.
[23] J. Peng, J. Luo, H. He, and B. Lu, “An improved state of charge estimation method based on cubature Kalman filter for lithium-
ion batteries,” Applied Energy, vol. 253, Nov. 2019, doi: 10.1016/j.apenergy.2019.113520.
[24] Z. He et al., “State-of-charge estimation of lithium ion batteries based on adaptive iterative extended Kalman filter,” Journal of
Energy Storage, vol. 39, Jul. 2021, doi: 10.1016/j.est.2021.102593.
[25] Z. Zhang, L. Jiang, L. Zhang, and C. Huang, “State-of-charge estimation of lithium-ion battery pack by using an adaptive
extended Kalman filter for electric vehicles,” Journal of Energy Storage, vol. 37, May 2021, doi: 10.1016/j.est.2021.102457.
BIOGRAPHIES OF AUTHORS
Anas El Maliki received a B.S degree in fundamental physics studies from
Mohammed V University of Rabat, in 2014 and an M.S. degree in physics and new
technology from Hassan II University of Casablanca, in 2017. Currently working toward a
Ph.D. degree in energy storage and sustainable energy at Ibn Tofail University Kenitra. He can
be contacted at email: anas.elmaliki@uit.ac.ma.
Abdessamad Benlafkih received the B.S. and M.S. degrees, from the University
of Sciences Dhar El Mehraz Fez, In 1997 and 2003, respectively. And the Ph.D. degree in
electrical engineering from the University Ibn Tofail Kenitra in 2015. He was a teacher in the
secondary cycle from 2004 to 2020. And in 2020, He has been a professor of electrical power
engineering at University Ibn Tofail Kenitra Morocco. He can be contacted at email:
abdessamad.benlafkih@uit.ac.ma.](https://crownmelresort.com/image.slidesharecdn.com/0631840ijecedbd-240104022259-5f3f6f25/75/Reduce-state-of-charge-estimation-errors-with-an-extended-Kalman-filter-algorithm-8-2048.jpg)






















![REAL_TIME_ESTIMATION_OF_SOC_AND_SOH[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/realtimeestimationofsocandsoh1-241216082315-d72b8b6e-thumbnail.jpg?width=640&height=640&fit=bounds)












































