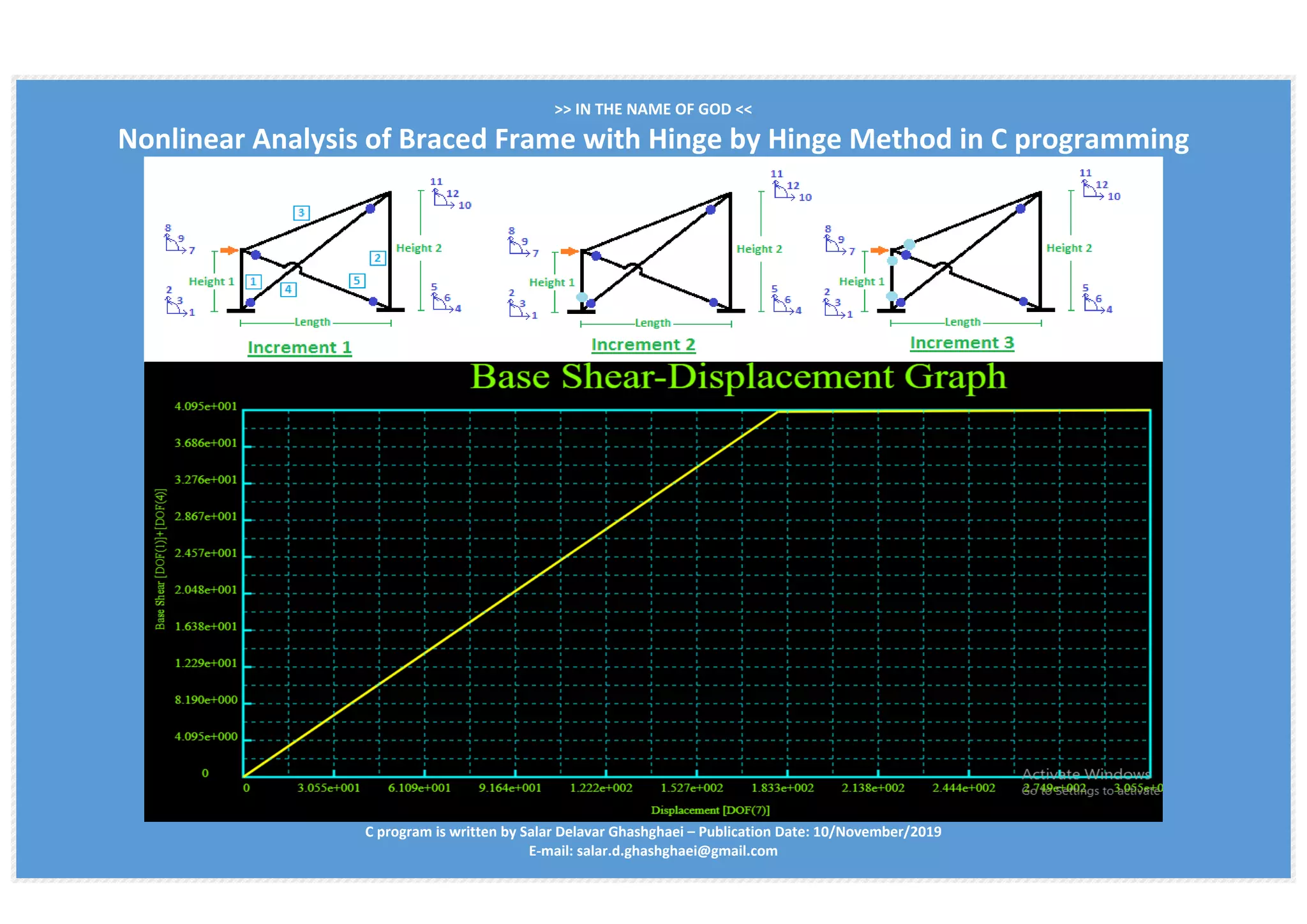
This document is a C program code for nonlinear analysis of braced frames with hinge elements using the hinge method. The program imports input data, calculates the global stiffness matrix and its inverse, determines member forces and displacements through matrix operations, and outputs results to Excel files. Key steps include importing geometry, material properties, and loading, calculating element and system stiffness matrices, inverting the system matrix, determining member forces and displacements, and reporting results.
![C Code:#include <stdio.h>
#include <windows.h> // text color
#include <conio.h>
#define NN 6 // Degree of freedom
#define Ne 5 // number of element
#define ShowText01 "Graph-outputHTML.html"
void IMPORT_DATA01(double &Length,double Height[],double &EA,double &EI,double &Ultimate_Moment);
void Matrix_Stiffness(double EA,double EI,double L[],double lanX[],double lanY[],double A[],double B[],double C[],double D[],double E[],double K[][6],double K_G[][6],int I,int II);
void MatrixDetermination(double [][NN],int );
void MatrixInverse(double [][NN], double [][NN],int );
void MatrixMulti01(double [][NN], double [], double [],int );
void Matrix_Transpose(double A[6][6],double B[6][6]);
void Matrix_Multiplication(double A[6][6],double B[6][6],double C[6][6]);
void ElementInternalForce(double K[][6],double U[],double lanX[],double lanY[],double ee[][6],int I);// Calculate internal element force
void ELEMNT_FORCE_OUTPUT(double eleF[3][6],double ELE_FORCE[3][30],double SUM_ELE_FORCE[30],double u[],double sum_u[], int I);
double ABS(double);
double MAX_ABS(double A[],int n);
double MIN(double A[],int n);
double SQRT2(double D);
void MessageInitialData(double L,double H[],double EI,double EA,double Ultimate_Moment);
void MessageAnalysisReport();
void MessageErrorReportTEXT();
void MessageInputDataTEXT();
void MessageCheck_IMPORT_DATA01(double L,double Height[],double EI,double EA,double Ultimate_Moment);
void MessageResult(double A[],double B[5][6],int n);
void OUTPUT_excel(double A[4][6],double B[4],double C[4][30],int n);
void ANALYSIS(double Length,double Height[],double EI,double EA,double Ultimate_Moment);
void Distance(int);
void textcolor(int ForgC);
void DATE_TIME();
void OUTPUT_HTML_GRAPH(double X[],double Y[],int n,const char text1[],const char text2[],const char text3[]);
int main(){
double Length,EI,EA,Height[2],Ultimate_Moment;
IMPORT_DATA01(Length,Height,EA,EI,Ultimate_Moment);
MessageCheck_IMPORT_DATA01(Length,Height,EI,EA,Ultimate_Moment);
textcolor(14);
MessageInitialData(Length,Height,EI,EA,Ultimate_Moment);
textcolor(11);
MessageAnalysisReport();
ANALYSIS(Length,Height,EI,EA,Ultimate_Moment);
getch();
return 0;
}
void MatrixInverse(double A[][NN], double C[][NN],int n){
int i,j,l;
double c_A[n][n],B[n][n],m,Sum;
for (i=0;i<n;i++)
for (j=0;j<n;j++)
c_A[i][j]=A[i][j];
// Inverse [Kinit]
for (i=0;i<n;i++)
for (j=0;j<n;j++){
if (i==j)
B[i][j]=1;
else
B[i][j]=0;
}
for (j=0;j<n-1;j++)
for (i=j+1;i<n;i++){
m=c_A[i][j]/c_A[j][j];
for (l=0;l<n;l++){
c_A[i][l] -= m*c_A[j][l];
B[i][l] -= m*B[j][l];
}
}
// backward substitutions
for (i=n-1;i>=0;i--)
for (j=0;j<n;j++){
Sum=0;
for (l=i+1;l<n;l++)
Sum += c_A[i][l]*C[l][j];
C[i][j]=(B[i][j]-Sum)/c_A[i][i];
}
}
void ElementInternalForce(double K[][6],double U[],double lanX[],double lanY[],double ee[][6],int I){
double lan[6][6],UU[6],ff,ll[6][6];
int II;
lan[0][0]=lanX[I];lan[0][1]=lanY[I];lan[0][2]=0;lan[0][3]=0;lan[0][4]=0;lan[0][5]=0;
lan[1][0]=-lanY[I];lan[1][1]=lanX[I];lan[1][2]=0;lan[1][3]=0;lan[1][4]=0;lan[1][5]=0;
lan[2][0]=0;lan[2][1]=0;lan[2][2]=1;lan[2][3]=0;lan[2][4]=0;lan[2][5]=0;
lan[3][0]=0;lan[3][1]=0;lan[3][2]=0;lan[3][3]=lanX[I];lan[3][4]=lanY[I];lan[3][5]=0;
lan[4][0]=0;lan[4][1]=0;lan[4][2]=0;lan[4][3]=-lanY[I];lan[4][4]=lanX[I];lan[4][5]=0;
lan[5][0]=0;lan[5][1]=0;lan[5][2]=0;lan[5][3]=0;lan[5][4]=0;lan[5][5]=1;
if (I == 0){
UU[0]=0;UU[1]=0;UU[2]=0;UU[3]=U[0];UU[4]=U[1];UU[5]=U[2];
}
if (I == 1){
UU[0]=0;UU[1]=0;UU[2]=0;UU[3]=U[3];UU[4]=U[4];UU[5]=U[5];
}
if (I == 2){
UU[0]=U[0];UU[1]=U[1];UU[2]=U[2];UU[3]=U[3];UU[4]=U[4];UU[5]=U[5];
}
int i,j;
for (i=0;i<6;i++)
for (j=0;j<6;j++)
ll[i][j]=0;
// [f] = [K] *[lan]* [u]
Matrix_Multiplication(K,lan,ll);
for (i=0; i<6; i++){
ff=0;
for (j=0; j<6; j++)
ff += ll[i][j]*UU[j];
ee[I][i] = ff;
}
}
void MatrixMulti01(double A[][NN], double B[], double C[],int n){
int i,j;
double ff;
// [u] = [Kinv] * [f]
for (i=0; i<n; i++)
{
ff=0;
for (j=0; j<n; j++)
ff += A[i][j]*B[j];
C[i] = ff;
}
}
double ABS(double B){
if (B < 0)
B = -B;//Absolute number
else
B = B;
return B;
}
double MIN(double A[],int n){
int i;
double Cmin;
Cmin = A[0];
// Max of abs
for (i=0;i<n;i++){
if(Cmin > A[i])
Cmin = A[i];
}
return Cmin;
}
void Distance(int i){
if (i < 10)
printf("bt");
if (i >= 10 && i <= 99)
printf("btb");
if (i >= 100 && i <= 999)
printf("btbb");
if (i >= 1000 && i <= 9999)
printf("btbbb");
if (i >= 10000 && i <= 20000)
printf("btbbbb");
}
void MessageInitialData(double L,double H[],double EI,double EA,double Ultimate_Moment){
char Qa,Qb,Qc,Qd,Qe,Qf,Qg,Qk;
int i;
Qa=201;Qb=205;Qc=187;Qd=200;Qe=188,Qf=186,Qg=204,Qk=185;
printf("tttt%c",Qa);
for (i=1;i<69;i++)
printf("%c",Qb);
printf("%cn",Qc);
printf("tttt%c >> IN THE NAME OF GOD << %cn",Qf,Qf);
printf("tttt%c Nonlinear Analysis of Frame and Brace with Hinge by Hinge Method %cn",Qf,Qf);
printf("tttt%c UNIT: Free Unit %cn",Qf,Qf);
printf("tttt%c",Qg);
for (i=1;i<69;i++)
printf("%c",Qb);
printf("%cn",Qk);
printf("tttt%c This program is written by Salar Delavar Ghashghaei %cn",Qf,Qf);
printf("tttt%c E-mail: salar.d.ghashghaei@gmail.com %cn",Qf,Qf);
printf("tttt%c",Qd);
for (i=1;i<69;i++)
printf("%c",Qb);
printf("%cn",Qe);
MessageInputDataTEXT();
printf(" Length of Frame: %.3en",L);
printf(" Height of Column 1: %.3en",H[0]);
printf(" Height of Column 2: %.3en",H[1]);
printf(" Section flextural rigidity - EI: %.3en",EI);
printf(" Section axial rigidity - EA: %.3en",EA);
printf(" Section ultimate capacity moment: %.3en",Ultimate_Moment);
}
void MessageAnalysisReport(){
int i;
char Ql=176;
printf("n ");
for (i=1;i<64;i++)](https://image.slidesharecdn.com/ywtoiclmr7mvt7yxgevo-signature-7909aa470f113a1c167e77875a4dfd9d2e15f6b96c4e85f722a896a967430206-poli-191110114946/75/Nonlinear-analysis-of-braced-frame-with-hinge-by-hinge-method-in-c-programming-2-2048.jpg)
![printf("%c",Ql);
printf(" Analysis Report ");
for (i=1;i<64;i++)
printf("%c",Ql);
printf("n");
}
void MessageCheck_IMPORT_DATA01(double L,double Height[],double EI,double EA,double Ultimate_Moment){
if ( L < 0 || Height[0] < 0 || Height[1] < 0 || EI < 0 || EA < 0 || Ultimate_Moment < 0 ){
MessageErrorReportTEXT();
printf(" Please check this file! -> [ PushoverHingeByHingeMethodFrameBrace-inputDATA.csv ]n");
printf(" *** Negative data input value is not acceptable ***n");
printf(" Length of Frame: %.3en",L);
printf(" Height of Column 1: %.3en",Height[0]);
printf(" Height of Column 2: %.3en",Height[1]);
printf(" Section flextural rigidity - EI: %.3en",EI);
printf(" Section axial rigidity - EA: %.3en",EA);
printf(" Section ultimate capacity moment: %.3en",Ultimate_Moment);
Sleep(40000);
exit(1);
}
}
void MessageErrorReportTEXT(){
int i;
char Ql;
Ql=176;
textcolor(12);
printf("an ");
for (i=1;i<50;i++)
printf("%c",Ql);
printf(" Error Report ");
for (i=1;i<50;i++)
printf("%c",Ql);
printf("n");
}
void MessageInputDataTEXT(){
int i;
char Ql=176;
printf("n ");
for (i=1;i<50;i++)
printf("%c",Ql);
printf(" Input Data ");
for (i=1;i<50;i++)
printf("%c",Ql);
printf("n");
}
void OUTPUT_excel(double A[4][6],double B[4],double C[4][30],int n){
// EXCEL OUTPUT
int i;
FILE *OutputFile;
OutputFile = fopen("PushoverHingeByHingeMethodFrameBrace-outputEXCEL.csv", "w");
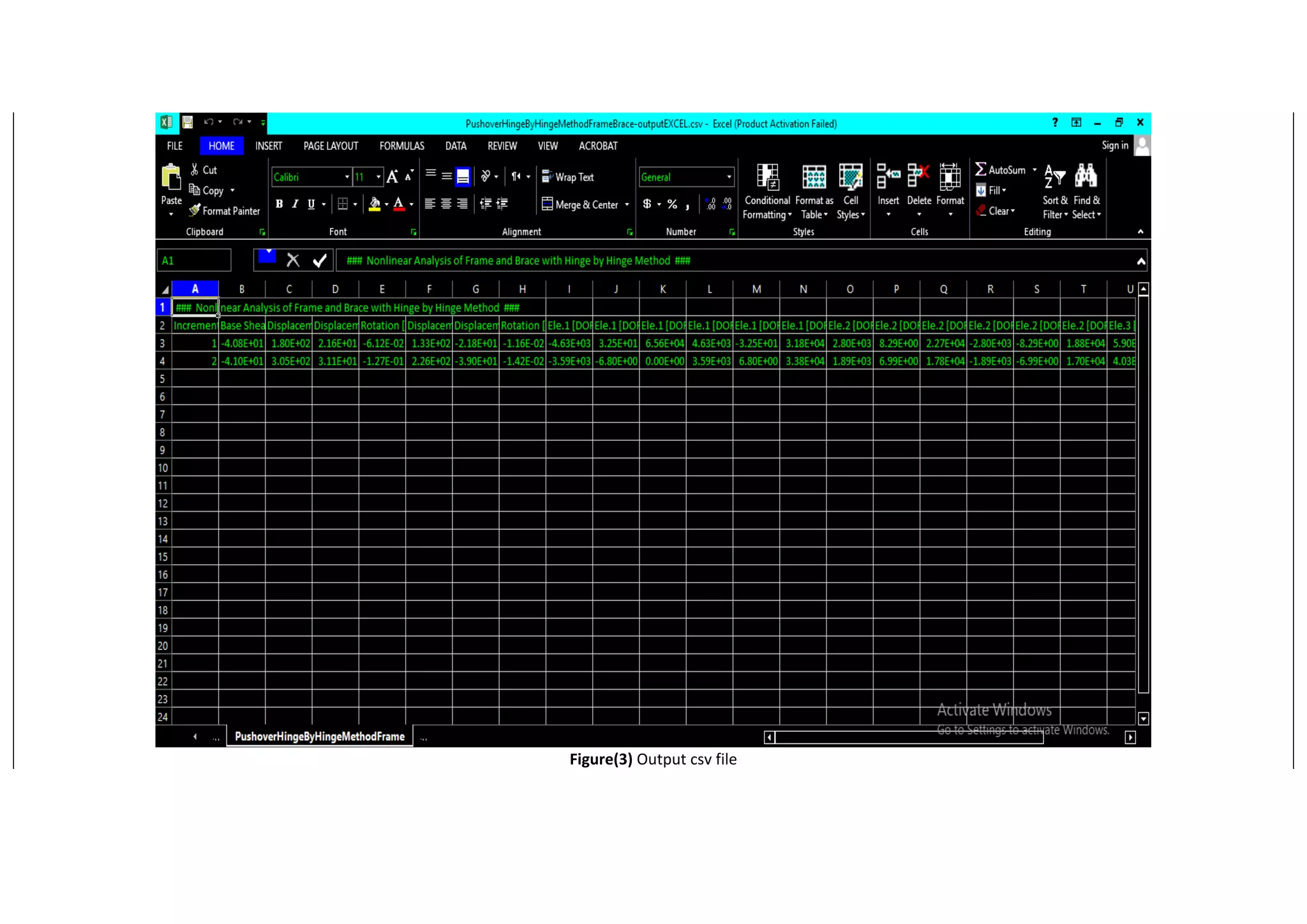
fprintf(OutputFile," ### Nonlinear Analysis of Frame and Brace with Hinge by Hinge Method ###n");
fprintf(OutputFile,"Increment,Base Shear[DOF(1)]+[DOF(4)],Displacement [DOF(7)],Displacement [DOF(8)],Rotation [DOF(9)],Displacement [DOF(10)],Displacement [DOF(11)],Rotation [DOF(12)],Ele.1 [DOF(1)],Ele.1 [DOF(2)],Ele.1 [DOF(3)],Ele.1 [DOF(7)],Ele.1 [DOF(8)],Ele.1 [DOF(9)],Ele.2 [DOF(4)],Ele.2 [DOF(5)],Ele.2 [DOF(6)],Ele.2 [DOF(10)],Ele.2 [DOF(11)],Ele.2 [DOF(12)],Ele.3 [DOF(7)],Ele.3 [DOF(8)],Ele.3 [DOF(9)],Ele.3 [DOF(10)],Ele.3 [DOF(11)],Ele.3 [DOF(12)]n");
for(i=0;i<n;i++)
fprintf(OutputFile,"%d,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%en",i+1,B[i],A[i][0],A[i][1],A[i][2],A[i][3],A[i][4],A[i][5],C[i][0],C[i][1],C[i][2],C[i][3],C[i][4],C[i][5],C[i][6],C[i][7],C[i][8],C[i][9],C[i][10],C[i][11],C[i][12],C[i][13],C[i][14],C[i][15],C[i][16],C[i][17]);
fclose(OutputFile);
}
void MatrixDetermination(double A[][NN],int n){
// row operations
int i,j,k;
double Product,m,B[n][n];
for (i=0;i<n;i++)
for (j=0;j<n;j++)
B[i][j]=A[i][j];
for (k=0;k<n-1;k++)
for (i=k+1;i<n;i++){
m = B[i][k]/B[k][k];
for (j=0;j<n;j++)
B[i][j] -= m*B[k][j];
}
Product=1;
for (i=0;i<n;i++)
Product *= B[i][i];
// display results
if (Product == 0){
printf("ant ### it Seens that Golobal Matrix is singular or structure is unstable!!! ###n");
Sleep(40000);
exit(1);
}
}
void IMPORT_DATA01(double &Length,double Height[],double &EA,double &EI,double &Ultimate_Moment){
double Import_Data[6];
int i=0;
FILE *InputFile;
InputFile = fopen("PushoverHingeByHingeMethodFrameBrace-inputDATA.csv", "r");
if (!InputFile){
MessageErrorReportTEXT();
printf(" File is not available! -> [PushoverHingeByHingeMethodFrameBrace-inputDATA.csv] n");
Sleep(6000);
exit(1);
}
char line[100],a[100];
while(i < 6 && fgets(line,sizeof(line),InputFile) != NULL){
sscanf(line,"%s",a);
//printf("a[%d]: %sn",i,a);
Import_Data[i]= atof(a);
i++;
}
Length=Import_Data[0];
Height[0]=Import_Data[1];
Height[1]=Import_Data[2];
EI=Import_Data[3];
EA=Import_Data[4];
Ultimate_Moment=Import_Data[5];
}
void textcolor(int ForgC){
WORD wColor;
//This handle is needed to get the current background attribute
HANDLE hStdOut = GetStdHandle(STD_OUTPUT_HANDLE);
CONSOLE_SCREEN_BUFFER_INFO csbi;
//csbi is used for wAttributes word
if(GetConsoleScreenBufferInfo(hStdOut, &csbi)){
//To mask out all but the background attribute, and to add the color
wColor = (csbi.wAttributes & 0xF0) + (ForgC & 0x0F);
SetConsoleTextAttribute(hStdOut, wColor);
}
return;
}
void ANALYSIS(double Length,double Height[],double EI,double EA,double Ultimate_Moment){
int i,j;
double K[NN][NN],Kinv[NN][NN],eleF[5][6],ELE_FORCE[3][30],SUM_ELE_FORCE[30];
double L[Ne],lanX[Ne],lanY[Ne],AA[Ne],BB[Ne],CC[Ne],DD[Ne],EE[Ne],F[NN],u[6],sum_u[6],Mi[6];
double output_u[3][6],output_base[3];
double MS[6][6],KG[6][6],LANNDA[6],LANNDA_min;
double x[4],y[4];
for (i=0;i<NN;i++)
for (j=0;j<NN;j++)
K[i][j]=0;
for (i=0;i<NN;i++){
F[i]=0;u[i] = 0;sum_u[i] = 0;Mi[i] = 0;
}
for(int j=0;j<3;j++){
for(i=0;i<6*Ne;i++)
ELE_FORCE[j][i] = 0;
}
for(i=0;i<6*Ne;i++)
SUM_ELE_FORCE[i] = 0;
// SATAGE: 01
F[0]=1;
x[0] = 0;y[0] = 0;
x[1] = Length;y[1] = 0;
x[2] = 0+sum_u[0];y[2] = Height[0]+sum_u[1];
x[3] = Length+sum_u[3];y[3] = Height[1]+sum_u[4];
L[0] = SQRT2((x[2]-x[0])*(x[2]-x[0])+(y[2]-y[0])*(y[2]-y[0]));
L[1] = SQRT2((x[3]-x[1])*(x[3]-x[1])+(y[3]-y[1])*(y[3]-y[1]));
L[2] = SQRT2((x[3]-x[2])*(x[3]-x[2])+(y[3]-y[2])*(y[3]-y[2]));
L[3] = SQRT2((x[3]-x[0])*(x[3]-x[0])+(y[3]-y[0])*(y[3]-y[0]));
L[4] = SQRT2((x[2]-x[1])*(x[2]-x[1])+(y[2]-y[1])*(y[2]-y[1]));
lanX[0] = (x[2]-x[0])/L[0];lanY[0] = (y[2]-y[0])/L[0];
lanX[1] = (x[3]-x[1])/L[1];lanY[1] = (y[3]-y[1])/L[1];
lanX[2] = (x[3]-x[2])/L[2];lanY[2] = (y[3]-y[2])/L[2];
lanX[3] = (x[3]-x[0])/L[3];lanY[3] = (y[3]-y[0])/L[3];
lanX[4] = (x[2]-x[1])/L[4];lanY[4] = (y[2]-y[1])/L[4];
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,1);
K[0][0]= KG[3][3];//DOF(7)
K[0][1]= KG[3][4];//DOF(7)
K[0][2]= KG[3][5];//DOF(7)
K[1][0]= KG[4][3];//DOF(8)
K[1][1]= KG[4][4];//DOF(8)
K[1][2]= KG[4][5];//DOF(8)
K[2][0]= KG[5][3];//DOF(9)
K[2][1]= KG[5][4];//DOF(9)
K[2][2]= KG[5][5];//DOF(9)
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1);
K[3][3]= KG[3][3];//DOF(10)
K[3][4]= KG[3][4];//DOF(10)
K[3][5]= KG[3][5];//DOF(10)
K[4][3]= KG[4][3];//DOF(11)
K[4][4]= KG[4][4];//DOF(11)
K[4][5]= KG[4][5];//DOF(11)
K[5][3]= KG[5][3];//DOF(12)
K[5][4]= KG[5][4];//DOF(12)
K[5][5]= KG[5][5];//DOF(12)
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,1);
K[0][0]+= KG[0][0];//DOF(7)
K[0][1]+= KG[0][1];//DOF(7)
K[0][2]+= KG[0][2];//DOF(7)
K[1][0]+= KG[1][0];//DOF(8)
K[1][1]+= KG[1][1];//DOF(8)
K[1][2]+= KG[1][2];//DOF(8)](https://image.slidesharecdn.com/ywtoiclmr7mvt7yxgevo-signature-7909aa470f113a1c167e77875a4dfd9d2e15f6b96c4e85f722a896a967430206-poli-191110114946/75/Nonlinear-analysis-of-braced-frame-with-hinge-by-hinge-method-in-c-programming-3-2048.jpg)
![K[2][0]+= KG[2][0];//DOF(9)
K[2][1]+= KG[2][1];//DOF(9)
K[2][2]+= KG[2][2];//DOF(9)
K[3][3]+= KG[3][3];//DOF(10)
K[3][4]+= KG[3][4];//DOF(10)
K[3][5]+= KG[3][5];//DOF(10)
K[4][3]+= KG[4][3];//DOF(11)
K[4][4]+= KG[4][4];//DOF(11)
K[4][5]+= KG[4][5];//DOF(11)
K[5][3]+= KG[5][3];//DOF(12)
K[5][4]+= KG[5][4];//DOF(12)
K[5][5]+= KG[5][5];//DOF(12)
K[0][3]= KG[0][3];//DOF(7)
K[0][4]= KG[0][4];//DOF(7)
K[0][5]= KG[0][5];//DOF(7)
K[1][3]= KG[1][3];//DOF(8)
K[1][4]= KG[1][4];//DOF(8)
K[1][5]= KG[1][5];//DOF(8)
K[2][3]= KG[2][3];//DOF(9)
K[2][4]= KG[2][4];//DOF(9)
K[2][5]= KG[2][5];//DOF(9)
K[3][0]= KG[3][0];//DOF(10)
K[3][1]= KG[3][1];//DOF(10)
K[3][2]= KG[3][2];//DOF(10)
K[4][0]= KG[4][0];//DOF(11)
K[4][1]= KG[4][1];//DOF(11)
K[4][2]= KG[4][2];//DOF(11)
K[5][0]= KG[5][0];//DOF(12)
K[5][1]= KG[5][1];//DOF(12)
K[5][2]= KG[5][2];//DOF(12)
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,3,4);
K[3][3]+= KG[3][3];//DOF(10)
K[3][4]+= KG[3][4];//DOF(10)
K[3][5]+= KG[3][5];//DOF(10)
K[4][3]+= KG[4][3];//DOF(11)
K[4][4]+= KG[4][4];//DOF(11)
K[4][5]+= KG[4][5];//DOF(11)
K[5][3]+= KG[5][3];//DOF(12)
K[5][4]+= KG[5][4];//DOF(12)
K[5][5]+= KG[5][5];//DOF(12)
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,4,4);
K[0][0]+= KG[3][3];//DOF(7)
K[0][1]+= KG[3][4];//DOF(7)
K[0][2]+= KG[3][5];//DOF(7)
K[1][0]+= KG[4][3];//DOF(8)
K[1][1]+= KG[4][4];//DOF(8)
K[1][2]+= KG[4][5];//DOF(8)
K[2][0]+= KG[5][3];//DOF(9)
K[2][1]+= KG[5][4];//DOF(9)
K[2][2]+= KG[5][5];//DOF(9)
MatrixDetermination(K,NN);
MatrixInverse(K,Kinv,NN);// Inverse [Kinit]
MatrixMulti01(Kinv,F,u,NN);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,0);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,1);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,2);
LANNDA[0]=(Ultimate_Moment-ABS(Mi[0]))/ABS(eleF[0][2]);
LANNDA[1]=(Ultimate_Moment-ABS(Mi[1]))/ABS(eleF[0][5]);
LANNDA[2]=(Ultimate_Moment-ABS(Mi[2]))/ABS(eleF[1][2]);
LANNDA[3]=(Ultimate_Moment-ABS(Mi[3]))/ABS(eleF[1][5]);
LANNDA[4]=(Ultimate_Moment-ABS(Mi[4]))/ABS(eleF[2][2]);
LANNDA[5]=(Ultimate_Moment-ABS(Mi[5]))/ABS(eleF[2][5]);
LANNDA_min = MIN(LANNDA,6);
for (i=0;i<NN;i++)
u[i]=LANNDA_min*u[i];
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,0);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,1);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,2);
Mi[0]=eleF[0][2];
Mi[1]=eleF[0][5];
Mi[2]=eleF[1][2];
Mi[3]=eleF[1][5];
Mi[4]=eleF[2][2];
Mi[5]=eleF[2][5];
ELEMNT_FORCE_OUTPUT(eleF,ELE_FORCE,SUM_ELE_FORCE,u,sum_u,0);
for (i=0;i<NN;i++)
output_u[0][i]=sum_u[i];//output displacement
output_base[0]=-SUM_ELE_FORCE[1]-SUM_ELE_FORCE[7]-SUM_ELE_FORCE[19]-SUM_ELE_FORCE[25];//output base shear
// So plastic hinge has formed in 1 node
// SATAGE: 02
x[0] = 0;y[0] = 0;
x[1] = Length;y[1] = 0;
x[2] = 0+sum_u[0];y[2] = Height[0]+sum_u[1];
x[3] = Length+sum_u[3];y[3] = Height[1]+sum_u[4];
L[0] = SQRT2((x[2]-x[0])*(x[2]-x[0])+(y[2]-y[0])*(y[2]-y[0]));
L[1] = SQRT2((x[3]-x[1])*(x[3]-x[1])+(y[3]-y[1])*(y[3]-y[1]));
L[2] = SQRT2((x[3]-x[2])*(x[3]-x[2])+(y[3]-y[2])*(y[3]-y[2]));
L[3] = SQRT2((x[3]-x[0])*(x[3]-x[0])+(y[3]-y[0])*(y[3]-y[0]));
L[4] = SQRT2((x[2]-x[1])*(x[2]-x[1])+(y[2]-y[1])*(y[2]-y[1]));
lanX[0] = (x[2]-x[0])/L[0];lanY[0] = (y[2]-y[0])/L[0];
lanX[1] = (x[3]-x[1])/L[1];lanY[1] = (y[3]-y[1])/L[1];
lanX[2] = (x[3]-x[2])/L[2];lanY[2] = (y[3]-y[2])/L[2];
lanX[3] = (x[3]-x[0])/L[3];lanY[3] = (y[3]-y[0])/L[3];
lanX[4] = (x[2]-x[1])/L[4];lanY[4] = (y[2]-y[1])/L[4];
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,2);
K[0][0]= KG[3][3];//DOF(7)
K[0][1]= KG[3][4];//DOF(7)
K[0][2]= KG[3][5];//DOF(7)
K[1][0]= KG[4][3];//DOF(8)
K[1][1]= KG[4][4];//DOF(8)
K[1][2]= KG[4][5];//DOF(8)
K[2][0]= KG[5][3];//DOF(9)
K[2][1]= KG[5][4];//DOF(9)
K[2][2]= KG[5][5];//DOF(9)
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1);
K[3][3]= KG[3][3];//DOF(10)
K[3][4]= KG[3][4];//DOF(10)
K[3][5]= KG[3][5];//DOF(10)
K[4][3]= KG[4][3];//DOF(11)
K[4][4]= KG[4][4];//DOF(11)
K[4][5]= KG[4][5];//DOF(11)
K[5][3]= KG[5][3];//DOF(12)
K[5][4]= KG[5][4];//DOF(12)
K[5][5]= KG[5][5];//DOF(12)
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,1);
K[0][0]+= KG[0][0];//DOF(7)
K[0][1]+= KG[0][1];//DOF(7)
K[0][2]+= KG[0][2];//DOF(7)
K[1][0]+= KG[1][0];//DOF(8)
K[1][1]+= KG[1][1];//DOF(8)
K[1][2]+= KG[1][2];//DOF(8)
K[2][0]+= KG[2][0];//DOF(9)
K[2][1]+= KG[2][1];//DOF(9)
K[2][2]+= KG[2][2];//DOF(9)
K[3][3]+= KG[3][3];//DOF(10)
K[3][4]+= KG[3][4];//DOF(10)
K[3][5]+= KG[3][5];//DOF(10)
K[4][3]+= KG[4][3];//DOF(11)
K[4][4]+= KG[4][4];//DOF(11)
K[4][5]+= KG[4][5];//DOF(11)
K[5][3]+= KG[5][3];//DOF(12)
K[5][4]+= KG[5][4];//DOF(12)
K[5][5]+= KG[5][5];//DOF(12)
K[0][3]= KG[0][3];//DOF(7)
K[0][4]= KG[0][4];//DOF(7)
K[0][5]= KG[0][5];//DOF(7)
K[1][3]= KG[1][3];//DOF(8)
K[1][4]= KG[1][4];//DOF(8)
K[1][5]= KG[1][5];//DOF(8)
K[2][3]= KG[2][3];//DOF(9)
K[2][4]= KG[2][4];//DOF(9)
K[2][5]= KG[2][5];//DOF(9)
K[3][0]= KG[3][0];//DOF(10)
K[3][1]= KG[3][1];//DOF(10)
K[3][2]= KG[3][2];//DOF(10)
K[4][0]= KG[4][0];//DOF(11)
K[4][1]= KG[4][1];//DOF(11)
K[4][2]= KG[4][2];//DOF(11)
K[5][0]= KG[5][0];//DOF(12)
K[5][1]= KG[5][1];//DOF(12)
K[5][2]= KG[5][2];//DOF(12)](https://image.slidesharecdn.com/ywtoiclmr7mvt7yxgevo-signature-7909aa470f113a1c167e77875a4dfd9d2e15f6b96c4e85f722a896a967430206-poli-191110114946/75/Nonlinear-analysis-of-braced-frame-with-hinge-by-hinge-method-in-c-programming-4-2048.jpg)
![Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,3,4);
K[3][3]+= KG[3][3];//DOF(10)
K[3][4]+= KG[3][4];//DOF(10)
K[3][5]+= KG[3][5];//DOF(10)
K[4][3]+= KG[4][3];//DOF(11)
K[4][4]+= KG[4][4];//DOF(11)
K[4][5]+= KG[4][5];//DOF(11)
K[5][3]+= KG[5][3];//DOF(12)
K[5][4]+= KG[5][4];//DOF(12)
K[5][5]+= KG[5][5];//DOF(12)
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,4,4);
K[0][0]+= KG[3][3];//DOF(7)
K[0][1]+= KG[3][4];//DOF(7)
K[0][2]+= KG[3][5];//DOF(7)
K[1][0]+= KG[4][3];//DOF(8)
K[1][1]+= KG[4][4];//DOF(8)
K[1][2]+= KG[4][5];//DOF(8)
K[2][0]+= KG[5][3];//DOF(9)
K[2][1]+= KG[5][4];//DOF(9)
K[2][2]+= KG[5][5];//DOF(9)
MatrixDetermination(K,NN);
MatrixInverse(K,Kinv,NN);// Inverse [Kinit]
MatrixMulti01(Kinv,F,u,NN);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,2);
ElementInternalForce(MS,u,lanX,lanY,eleF,0);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,1);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,2);
LANNDA[0]=1e+15;
LANNDA[1]=(Ultimate_Moment-ABS(Mi[1]))/ABS(eleF[0][5]);
LANNDA[2]=(Ultimate_Moment-ABS(Mi[2]))/ABS(eleF[1][2]);
LANNDA[3]=(Ultimate_Moment-ABS(Mi[3]))/ABS(eleF[1][5]);
LANNDA[4]=(Ultimate_Moment-ABS(Mi[4]))/ABS(eleF[2][2]);
LANNDA[5]=(Ultimate_Moment-ABS(Mi[5]))/ABS(eleF[2][5]);
LANNDA_min = MIN(LANNDA,6);
for (i=0;i<NN;i++)
u[i]=LANNDA_min*u[i];
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,2);
ElementInternalForce(MS,u,lanX,lanY,eleF,0);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,1);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,2);
Mi[0]=eleF[0][2];
Mi[1]=eleF[0][5];
Mi[2]=eleF[1][2];
Mi[3]=eleF[1][5];
Mi[4]=eleF[2][2];
Mi[5]=eleF[2][5];
ELEMNT_FORCE_OUTPUT(eleF,ELE_FORCE,SUM_ELE_FORCE,u,sum_u,1);
for (i=0;i<NN;i++)
output_u[1][i]=sum_u[i];//output displacement
output_base[1]=-SUM_ELE_FORCE[1]-SUM_ELE_FORCE[7]-SUM_ELE_FORCE[19]-SUM_ELE_FORCE[25];//output base shear
// So plastic hinge has formed in 3 node
// SATAGE: 03
x[0] = 0;y[0] = 0;
x[1] = Length;y[1] = 0;
x[2] = 0+sum_u[0];y[2] = Height[0]+sum_u[1];
x[3] = Length+sum_u[3];y[3] = Height[1]+sum_u[4];
L[0] = SQRT2((x[2]-x[0])*(x[2]-x[0])+(y[2]-y[0])*(y[2]-y[0]));
L[1] = SQRT2((x[3]-x[1])*(x[3]-x[1])+(y[3]-y[1])*(y[3]-y[1]));
L[2] = SQRT2((x[3]-x[2])*(x[3]-x[2])+(y[3]-y[2])*(y[3]-y[2]));
L[3] = SQRT2((x[3]-x[0])*(x[3]-x[0])+(y[3]-y[0])*(y[3]-y[0]));
L[4] = SQRT2((x[2]-x[1])*(x[2]-x[1])+(y[2]-y[1])*(y[2]-y[1]));
lanX[0] = (x[2]-x[0])/L[0];lanY[0] = (y[2]-y[0])/L[0];
lanX[1] = (x[3]-x[1])/L[1];lanY[1] = (y[3]-y[1])/L[1];
lanX[2] = (x[3]-x[2])/L[2];lanY[2] = (y[3]-y[2])/L[2];
lanX[3] = (x[3]-x[0])/L[3];lanY[3] = (y[3]-y[0])/L[3];
lanX[4] = (x[2]-x[1])/L[4];lanY[4] = (y[2]-y[1])/L[4];
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,4);
K[0][0]= KG[3][3];//DOF(7)
K[0][1]= KG[3][4];//DOF(7)
K[0][2]= KG[3][5];//DOF(7)
K[1][0]= KG[4][3];//DOF(8)
K[1][1]= KG[4][4];//DOF(8)
K[1][2]= KG[4][5];//DOF(8)
K[2][0]= KG[5][3];//DOF(9)
K[2][1]= KG[5][4];//DOF(9)
K[2][2]= KG[5][5];//DOF(9)
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1);
K[3][3]= KG[3][3];//DOF(10)
K[3][4]= KG[3][4];//DOF(10)
K[3][5]= KG[3][5];//DOF(10)
K[4][3]= KG[4][3];//DOF(11)
K[4][4]= KG[4][4];//DOF(11)
K[4][5]= KG[4][5];//DOF(11)
K[5][3]= KG[5][3];//DOF(12)
K[5][4]= KG[5][4];//DOF(12)
K[5][5]= KG[5][5];//DOF(12)
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,2);
K[0][0]+= KG[0][0];//DOF(7)
K[0][1]+= KG[0][1];//DOF(7)
K[0][2]+= KG[0][2];//DOF(7)
K[1][0]+= KG[1][0];//DOF(8)
K[1][1]+= KG[1][1];//DOF(8)
K[1][2]+= KG[1][2];//DOF(8)
K[2][0]+= KG[2][0];//DOF(9)
K[2][1]+= KG[2][1];//DOF(9)
K[2][2]+= KG[2][2];//DOF(9)
K[3][3]+= KG[3][3];//DOF(10)
K[3][4]+= KG[3][4];//DOF(10)
K[3][5]+= KG[3][5];//DOF(10)
K[4][3]+= KG[4][3];//DOF(11)
K[4][4]+= KG[4][4];//DOF(11)
K[4][5]+= KG[4][5];//DOF(11)
K[5][3]+= KG[5][3];//DOF(12)
K[5][4]+= KG[5][4];//DOF(12)
K[5][5]+= KG[5][5];//DOF(12)
K[0][3]= KG[0][3];//DOF(7)
K[0][4]= KG[0][4];//DOF(7)
K[0][5]= KG[0][5];//DOF(7)
K[1][3]= KG[1][3];//DOF(8)
K[1][4]= KG[1][4];//DOF(8)
K[1][5]= KG[1][5];//DOF(8)
K[2][3]= KG[2][3];//DOF(9)
K[2][4]= KG[2][4];//DOF(9)
K[2][5]= KG[2][5];//DOF(9)
K[3][0]= KG[3][0];//DOF(10)
K[3][1]= KG[3][1];//DOF(10)
K[3][2]= KG[3][2];//DOF(10)
K[4][0]= KG[4][0];//DOF(11)
K[4][1]= KG[4][1];//DOF(11)
K[4][2]= KG[4][2];//DOF(11)
K[5][0]= KG[5][0];//DOF(12)
K[5][1]= KG[5][1];//DOF(12)
K[5][2]= KG[5][2];//DOF(12)
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,3,4);
K[3][3]+= KG[3][3];//DOF(10)
K[3][4]+= KG[3][4];//DOF(10)
K[3][5]+= KG[3][5];//DOF(10)
K[4][3]+= KG[4][3];//DOF(11)
K[4][4]+= KG[4][4];//DOF(11)
K[4][5]+= KG[4][5];//DOF(11)
K[5][3]+= KG[5][3];//DOF(12)
K[5][4]+= KG[5][4];//DOF(12)
K[5][5]+= KG[5][5];//DOF(12)
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,4,4);
K[0][0]+= KG[3][3];//DOF(7)
K[0][1]+= KG[3][4];//DOF(7)
K[0][2]+= KG[3][5];//DOF(7)
K[1][0]+= KG[4][3];//DOF(8)
K[1][1]+= KG[4][4];//DOF(8)
K[1][2]+= KG[4][5];//DOF(8)
K[2][0]+= KG[5][3];//DOF(9)
K[2][1]+= KG[5][4];//DOF(9)
K[2][2]+= KG[5][5];//DOF(9)
MatrixDetermination(K,NN);
MatrixInverse(K,Kinv,NN);// Inverse [Kinit]
MatrixMulti01(Kinv,F,u,NN);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,4);
ElementInternalForce(MS,u,lanX,lanY,eleF,0);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,1);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,2);
ElementInternalForce(MS,u,lanX,lanY,eleF,2);
LANNDA[0]=(Ultimate_Moment-ABS(Mi[0]))/ABS(eleF[0][2]);
LANNDA[1]=(Ultimate_Moment-ABS(Mi[1]))/ABS(eleF[0][5]);
LANNDA[2]=(Ultimate_Moment-ABS(Mi[2]))/ABS(eleF[1][2]);
LANNDA[3]=(Ultimate_Moment-ABS(Mi[3]))/ABS(eleF[1][5]);
LANNDA[4]=(Ultimate_Moment-ABS(Mi[4]))/ABS(eleF[2][2]);
LANNDA[5]=(Ultimate_Moment-ABS(Mi[5]))/ABS(eleF[2][5]);
LANNDA_min = MIN(LANNDA,6);](https://image.slidesharecdn.com/ywtoiclmr7mvt7yxgevo-signature-7909aa470f113a1c167e77875a4dfd9d2e15f6b96c4e85f722a896a967430206-poli-191110114946/75/Nonlinear-analysis-of-braced-frame-with-hinge-by-hinge-method-in-c-programming-5-2048.jpg)
![for (i=0;i<NN;i++)
u[i]=LANNDA_min*u[i];
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,4);
ElementInternalForce(MS,u,lanX,lanY,eleF,0);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,1);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,2);
ElementInternalForce(MS,u,lanX,lanY,eleF,2);
Mi[0]=eleF[0][2];
Mi[1]=eleF[0][5];
Mi[2]=eleF[1][2];
Mi[3]=eleF[1][5];
Mi[4]=eleF[2][2];
Mi[5]=eleF[2][5];
ELEMNT_FORCE_OUTPUT(eleF,ELE_FORCE,SUM_ELE_FORCE,u,sum_u,2);
for (i=0;i<NN;i++)
output_u[2][i]=sum_u[i];//output displacement
output_base[2]=-SUM_ELE_FORCE[1]-SUM_ELE_FORCE[7]-SUM_ELE_FORCE[19]-SUM_ELE_FORCE[25];//output base shear
// So plastic hinge has formed in 3 node
MessageResult(output_base,output_u,3);
MatrixDetermination(K,NN);
OUTPUT_excel(output_u,output_base,ELE_FORCE,2);
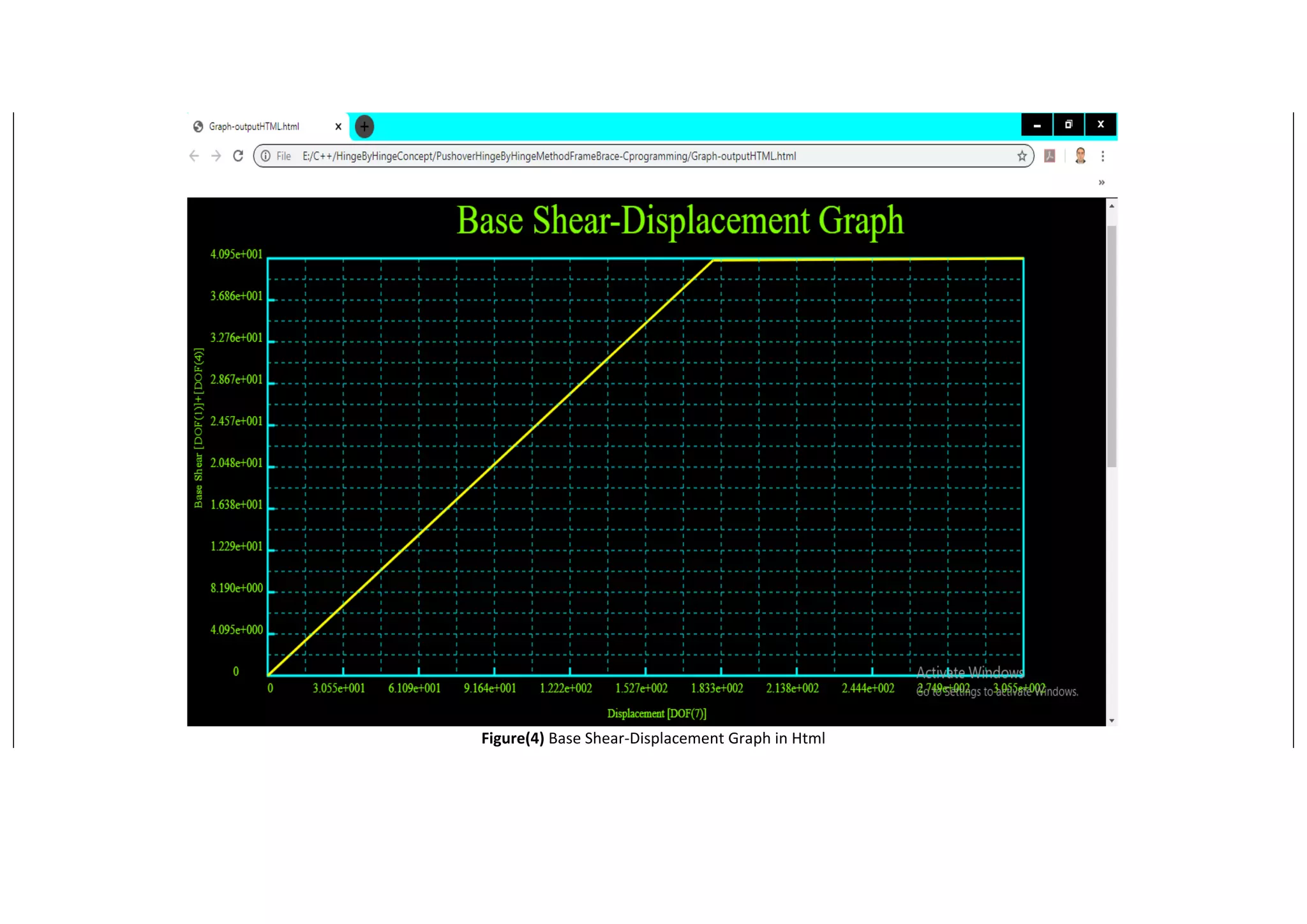
char text1[30]="Base Shear-Displacement Graph",text2[30]="Displacement [DOF(7)]",text3[30]="Base Shear [DOF(1)]+[DOF(4)]";
double X[2],Y[2];
for (i=0;i<2;i++){
X[i] = output_u[i][0];// Disp. DOF(7)
Y[i] = output_base[i];// Base Shear DOF(1)+DOF(4)
}
OUTPUT_HTML_GRAPH(X,Y,2,text1,text2,text3);
textcolor(15);
//printf("na - %s -n",ShowText01);
system("start /w Graph-outputHTML.html");
textcolor(15);
printf("na - Output data is written in Excel file -n");
DATE_TIME();
}
void DATE_TIME(){
printf("nt");
system("echo %date%");
printf("t");
system("echo %time%");
}
void Matrix_Stiffness(double EA,double EI,double L[],double lanX[],double lanY[],double A[],double B[],double C[],double D[],double E[],double K[][6],double K_G[][6],int I,int II){
double lan[6][6],lan_Tr[6][6],ans[6][6];
A[I] = 4*EI/L[I];
B[I] = 6*EI/(L[I]*L[I]);
C[I] = 2*EI/L[I];
D[I] = 12*EI/(L[I]*L[I]*L[I]);
E[I] = EA/L[I];
for (int i=0;i<6;i++)
for (int j=0;j<6;j++)
K[i][j] = 0;
//I:2 number of element - II: kind of stiffness matrix
if (II==1){// No plastic hinge
K[0][0]=E[I];K[0][1]=0;K[0][2]=0;K[0][3]=-E[I];K[0][4]=0;K[0][5]=0;
K[1][0]=0;K[1][1]=D[I];K[1][2]=B[I];K[1][3]=0;K[1][4]=-D[I];K[1][5]=B[I];
K[2][0]=0;K[2][1]=B[I];K[2][2]=A[I];K[2][3]=0;K[2][4]=-B[I];K[2][5]=C[I];
K[3][0]=-E[I];K[3][1]=0;K[3][2]=0;K[3][3]=E[I];K[3][4]=0;K[3][5]=0;
K[4][0]=0;K[4][1]=-D[I];K[4][2]=-B[I];K[4][3]=0;K[4][4]=D[I];K[4][5]=-B[I];
K[5][0]=0;K[5][1]=B[I];K[5][2]=C[I];K[5][3]=0;K[5][4]=-B[I];K[5][5]=A[I];
}
if (II==2){// plastic hinge at i
K[0][0]=E[I];K[0][1]=0;K[0][2]=0;K[0][3]=-E[I];K[0][4]=0;K[0][5]=0;
K[1][0]=0;K[1][1]=.25*D[I];K[1][2]=0;K[1][3]=0;K[1][4]=-.25*D[I];K[1][5]=.5*B[I];
K[2][0]=0;K[2][1]=0;K[2][2]=0;K[2][3]=0;K[2][4]=0;K[2][5]=0;
K[3][0]=-E[I];K[3][1]=0;K[3][2]=0;K[3][3]=E[I];K[3][4]=0;K[3][5]=0;
K[4][0]=0;K[4][1]=-.25*D[I];K[4][2]=0;K[4][3]=0;K[4][4]=.25*D[I];K[4][5]=-.5*B[I];
K[5][0]=0;K[5][1]=.5*B[I];K[5][2]=0;K[5][3]=0;K[5][4]=-.5*B[I];K[5][5]=(3/4)*A[I];
}
if (II==3){// plastic hinge at j
K[0][0]=E[I];K[0][1]=0;K[0][2]=0;K[0][3]=-E[I];K[0][4]=0;K[0][5]=0;
K[1][0]=0;K[1][1]=.25*D[I];K[1][2]=.5*B[I];K[1][3]=0;K[1][4]=-.25*D[I];K[1][5]=0;
K[2][0]=0;K[2][1]=.5*B[I];K[2][2]=(3/4)*A[I];K[2][3]=0;K[2][4]=-.5*B[I];K[2][5]=0;
K[3][0]=-E[I];K[3][1]=0;K[3][2]=0;K[3][3]=E[I];K[3][4]=0;K[3][5]=0;
K[4][0]=0;K[4][1]=-.25*D[I];K[4][2]=-.5*B[I];K[4][3]=0;K[4][4]=.25*D[I];K[4][5]=0;
K[5][0]=0;K[5][1]=0;K[5][2]=0;K[5][3]=0;K[5][4]=0;K[5][5]=0;
}
if (II==4){// plastic hinge at i and j
K[0][0]=E[I];K[0][1]=0;K[0][2]=0;K[0][3]=-E[I];K[0][4]=0;K[0][5]=0;
K[1][0]=0;K[1][1]=0;K[1][2]=0;K[1][3]=0;K[1][4]=0;K[1][5]=0;
K[2][0]=0;K[2][1]=0;K[2][2]=0;K[2][3]=0;K[2][4]=0;K[2][5]=0;
K[3][0]=-E[I];K[3][1]=0;K[3][2]=0;K[3][3]=E[I];K[3][4]=0;K[3][5]=0;
K[4][0]=0;K[4][1]=0;K[4][2]=0;K[4][3]=0;K[4][4]=0;K[4][5]=0;
K[5][0]=0;K[5][1]=0;K[5][2]=0;K[5][3]=0;K[5][4]=0;K[5][5]=0;
}
lan[0][0]=lanX[I];lan[0][1]=lanY[I];lan[0][2]=0;lan[0][3]=0;lan[0][4]=0;lan[0][5]=0;
lan[1][0]=-lanY[I];lan[1][1]=lanX[I];lan[1][2]=0;lan[1][3]=0;lan[1][4]=0;lan[1][5]=0;
lan[2][0]=0;lan[2][1]=0;lan[2][2]=1;lan[2][3]=0;lan[2][4]=0;lan[2][5]=0;
lan[3][0]=0;lan[3][1]=0;lan[3][2]=0;lan[3][3]=lanX[I];lan[3][4]=lanY[I];lan[3][5]=0;
lan[4][0]=0;lan[4][1]=0;lan[4][2]=0;lan[4][3]=-lanY[I];lan[4][4]=lanX[I];lan[4][5]=0;
lan[5][0]=0;lan[5][1]=0;lan[5][2]=0;lan[5][3]=0;lan[5][4]=0;lan[5][5]=1;
Matrix_Transpose(lan,lan_Tr);
Matrix_Multiplication(lan_Tr,K,ans);
Matrix_Multiplication(ans,lan,K_G);
}
void ELEMNT_FORCE_OUTPUT(double eleF[5][6],double ELE_FORCE[4][30],double SUM_ELE_FORCE[30],double u[],double sum_u[], int I){
int i;
for (i=0;i<6;i++)
ELE_FORCE[I][i]=eleF[0][i];
for (i=6;i<12;i++)
ELE_FORCE[I][i]=eleF[1][i-6];
for (i=12;i<18;i++)
ELE_FORCE[I][i]=eleF[2][i-12];
for (i=18;i<24;i++)
ELE_FORCE[I][i]=eleF[3][i-18];
for (i=24;i<30;i++)
ELE_FORCE[I][i]=eleF[4][i-24];
for (i=0;i<6*Ne;i++)
SUM_ELE_FORCE[i] += ELE_FORCE[I][i];
for (i=0;i<NN;i++)
sum_u[i] += u[i];
}
double SQRT2(double D){
int it,itermax;
double residual,tolerance,x,dx,dx_ABS,f,df;
it = 0; // initialize iteration count
itermax = 100000;
residual = 100; // initialize residual
tolerance = 1e-8;
x = 1;// initialize answer
while (residual > tolerance){
f = x*x - D;
df = 2 * x;
dx = f/df;
x= x - dx;
residual = ABS(dx); // abs residual
it = it + 1; // increment iteration count
//printf("f: %f -tdx: %f -tresidual: %fn",f,dx,residual);
if (it == itermax){
//printf("tSQRT2(number,power) : SQRT2(%f) - iteration: %d -> ## The solution is not converged ##n",D,it);
break;
}
}
if (it < itermax){
//printf("tSQRT(number,power) - SQRT(%f,%f) : %f n",D,n, x);
return x;
}
}
void Matrix_Transpose(double A[6][6],double B[6][6]){
int i,j;
for (i=0;i<6;i++)
for (j=0;j<6;j++)
B[j][i]=A[i][j];
}
void Matrix_Multiplication(double A[6][6],double B[6][6],double C[6][6]){
int i,j,k;
double sum;
for (i=0;i<6;i++)
for (j=0;j<6;j++){
sum=0;
for (k=0;k<6;k++)
sum += A[i][k]*B[k][j];
C[i][j] = sum;
}
}
void MessageResult(double A[],double B[5][6],int n){
int i;
printf("t ");
for (i=0;i<147;i++)
printf("-");
printf("n");
printf("t Increment Base Shear[DOF(1)]+[DOF(4)] Disp. [DOF(7)] Disp. [DOF(8)] Rotation [DOF(9)] Disp. [DOF(10)] Disp. [DOF(11)] Rotation [DOF(12)]n");
printf("t ");
for (i=0;i<147;i++)
printf("-");
printf("n");
for (i=0;i<n;i++)
printf("tt %dtt %.3et %.3et%.3et %.3et %.3e %.3et %.3en",i+1,A[i],B[i][0],B[i][1],B[i][2],B[i][3],B[i][4],B[i][5]);
}
void OUTPUT_HTML_GRAPH(double X[],double Y[],int n,const char text1[],const char text2[],const char text3[]){
// HTML GRAPH OUTPUT
int i;
double x,y,Xnew[3],Ynew[3],NorX[3],NorY[3],Xmax,Ymax;
Xmax=MAX_ABS(X,n);
Ymax=MAX_ABS(Y,n);
Xnew[0]=0;Ynew[0]=0;
for (i=0;i<n;i++){
Xnew[i+1] = ABS(X[i]);
Ynew[i+1] = ABS(Y[i]);
}
for (i=0;i<n+1;i++){
NorX[i] = Xnew[i]/Xmax;
NorY[i] = Ynew[i]/Ymax;
//printf("t %f %f n",NorX[i],NorY[i]);
}
FILE *OutputFile;
OutputFile = fopen(ShowText01, "w");
fprintf(OutputFile,"<!DOCTYPE HTML><html><body style="background-color:black;"><font color="white"><head><script> n");
fprintf(OutputFile,"window.onload = function(){ n");
fprintf(OutputFile,"var canvas = document.getElementById("myCanvas");var s1 = canvas.getContext("2d");var s2 = canvas.getContext('2d'); n");
fprintf(OutputFile,"var s3 = canvas.getContext("2d");var s4 = canvas.getContext("2d");var s5 = canvas.getContext("2d"); n");
fprintf(OutputFile,"var x=120,y=100,X,Y,Lx=1100,Ly=500,i; n");
fprintf(OutputFile,"s3.beginPath();s3.lineWidth = 3;s3.strokeStyle = "cyan";s3.rect(x,y,Lx,Ly); n");
fprintf(OutputFile,"for(i=0;i<9;i++){s3.moveTo(x+Lx*(i+1)*.1,y+Ly);s3.lineTo(x+Lx*(i+1)*.1,y+Ly-10);}; n");](https://image.slidesharecdn.com/ywtoiclmr7mvt7yxgevo-signature-7909aa470f113a1c167e77875a4dfd9d2e15f6b96c4e85f722a896a967430206-poli-191110114946/75/Nonlinear-analysis-of-braced-frame-with-hinge-by-hinge-method-in-c-programming-6-2048.jpg)
![fprintf(OutputFile,"for(i=0;i<9;i++){s3.moveTo(x,y+Ly*(i+1)*.1);s3.lineTo(x+10,y+Ly*(i+1)*.1);};s3.stroke();n");
fprintf(OutputFile,"s1.beginPath();s1.lineWidth = 3;s1.strokeStyle = "yellow"; n");
for (i=0;i<n;i++){
fprintf(OutputFile,"s1.moveTo(%f,%f);",120+NorX[i]*1100,100+500-NorY[i]*500);
fprintf(OutputFile,"s1.lineTo(%f,%f); n",120+NorX[i+1]*1100,100+500-NorY[i+1]*500);
}
fprintf(OutputFile,"s1.stroke(); n");
fprintf(OutputFile,"s2.beginPath();s2.lineWidth = 1;s2.strokeStyle = "cyan";s2.setLineDash([5, 5]); n");
fprintf(OutputFile,"for(i=0;i<19;i++){s2.moveTo(x+Lx*(i+1)*.05,y);s2.lineTo(x+Lx*(i+1)*.05,y+Ly);} n");
fprintf(OutputFile,"s2.lineWidth = 1;s2.strokeStyle = "cyan";for(i=0;i<19;i++){s2.moveTo(x,y+Ly*(i+1)*.05);s2.lineTo(x+Lx,y+Ly*(i+1)*.05);} s2.stroke();n");
fprintf(OutputFile,"X=x+.25*Lx;Y=.7*y;s4.translate(X,Y);s4.font="50px serif";s4.fillStyle = "#7fff00";s4.fillText("%s",0,0); n",text1);
fprintf(OutputFile,"s4.save();X=-X+.2*x;Y=-Y+y+.6*Ly;s4.translate(X,Y);s4.rotate(3*Math.PI/2);s4.font="15px serif"; n");
fprintf(OutputFile,"s4.fillStyle = "#7fff00";s4.textAlign = "left";s4.fillText("%s",0,0);s4.restore(); n",text3);
fprintf(OutputFile,"s4.save();X=.2*Lx;Y=y+Ly-20;s4.translate(X,Y);s4.rotate(2*Math.PI);s4.font="15px serif";s4.fillStyle = "#7fff00"; n");
fprintf(OutputFile,"s4.textAlign = "left";s4.fillText("%s",0,0);s4.restore(); n",text2);
for(i=0;i<10;i++){
x=.1*(i+1)*Xmax;
fprintf(OutputFile,"s5.save();X=-.29*Lx+Lx*(%d+1)*.1;Y=.3*y+Ly+20;s5.rotate(2*Math.PI);s5.font="16px serif"; n",i);
fprintf(OutputFile,"s5.fillStyle = "#7fff00";s5.textAlign = "left";s5.fillText("%.3e",X,Y);s5.restore(); n",x);
}
for(i=0;i<10;i++){
y=.1*(i+1)*Ymax;
fprintf(OutputFile,"s5.save();X=-.28*Lx-50;Y=Ly+.3*y-Ly*(%d+1)*.1;s5.rotate(2*Math.PI);s5.font="16px serif"; n",i);
fprintf(OutputFile,"s5.fillStyle = "#7fff00";s5.textAlign = "left";s5.fillText("%.3e",X,Y);s5.restore(); n",y);
}
fprintf(OutputFile,"s5.save();X=-.25*Lx;Y=.3*y+Ly+20;s5.rotate(2*Math.PI);s5.font="16px serif";s5.fillStyle = "#7fff00";s5.fillText(0,X,Y);s5.restore(); n");
fprintf(OutputFile,"s5.save();X=-.25*Lx-50;Y=Ly+.3*y;s5.rotate(2*Math.PI);s5.font="16px serif";s5.fillStyle = "#7fff00";s5.textAlign = "left";s5.fillText(0,X,Y);s5.restore();}; n");
fprintf(OutputFile,"</script></head><body><canvas id="myCanvas" width="1300" height="1300" style="border:1px solid black;"></canvas></body></html> n");
fclose(OutputFile);
}
double MAX_ABS(double A[],int n){
int i;
double B[2];
double Amax;
// abs value
for (i=0;i<n;i++){
B[i] = A[i];
if(B[i] < 0)
B[i] = -B[i];
}
// Max of abs
Amax = B[0];
for (i=1;i<n;i++){
if(Amax < B[i])
Amax = B[i];
}
return Amax;
}
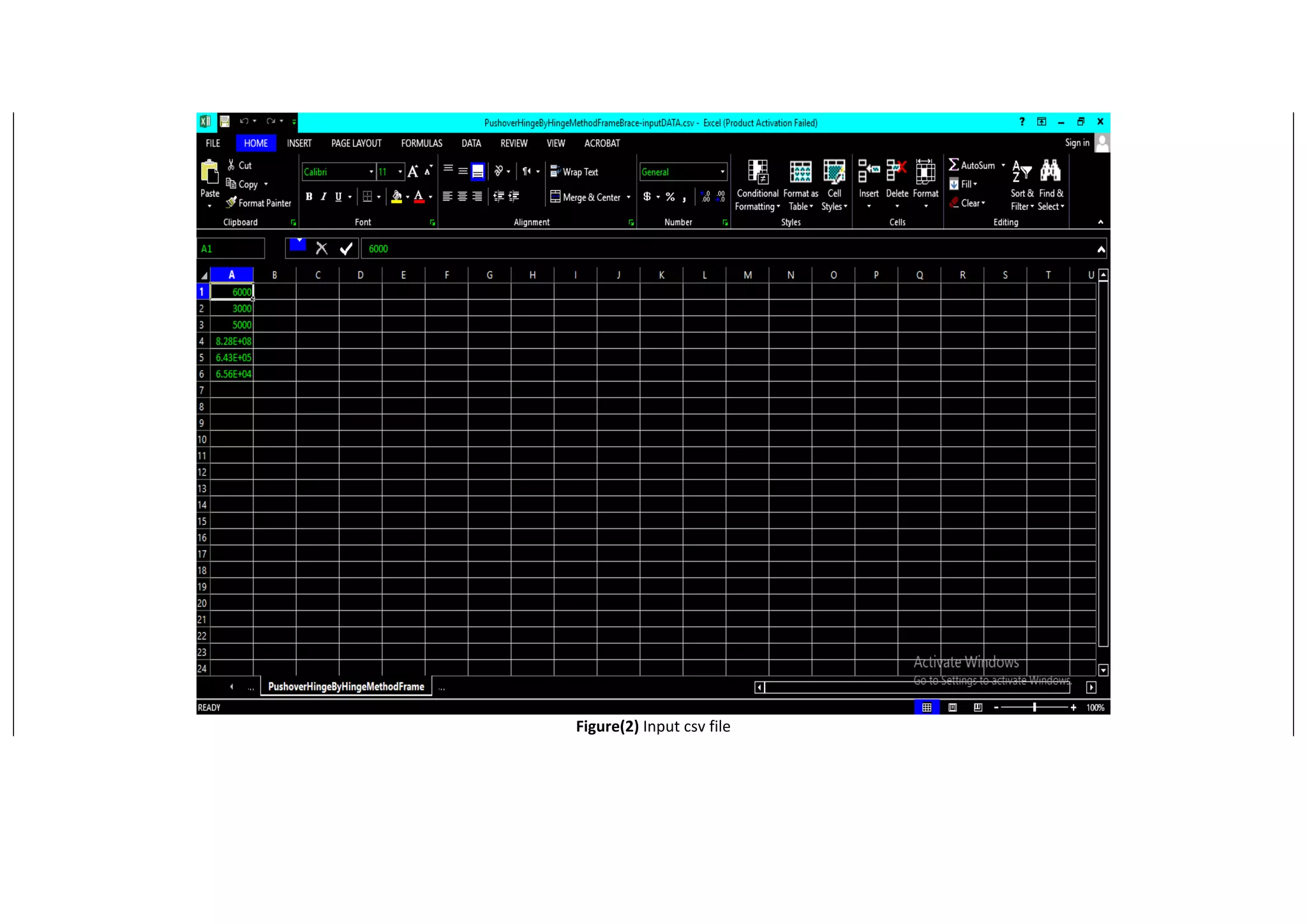
Plot :
Figure(1) Analysis file](https://image.slidesharecdn.com/ywtoiclmr7mvt7yxgevo-signature-7909aa470f113a1c167e77875a4dfd9d2e15f6b96c4e85f722a896a967430206-poli-191110114946/75/Nonlinear-analysis-of-braced-frame-with-hinge-by-hinge-method-in-c-programming-7-2048.jpg)

![C Code:#include <stdio.h>
#include <windows.h> // text color
#include <conio.h>
#define NN 6 // Degree of freedom
#define Ne 5 // number of element
#define ShowText01 "Graph-outputHTML.html"
void IMPORT_DATA01(double &Length,double Height[],double &EA,double &EI,double &Ultimate_Moment);
void Matrix_Stiffness(double EA,double EI,double L[],double lanX[],double lanY[],double A[],double B[],double C[],double D[],double E[],double K[][6],double K_G[][6],int I,int II);
void MatrixDetermination(double [][NN],int );
void MatrixInverse(double [][NN], double [][NN],int );
void MatrixMulti01(double [][NN], double [], double [],int );
void Matrix_Transpose(double A[6][6],double B[6][6]);
void Matrix_Multiplication(double A[6][6],double B[6][6],double C[6][6]);
void ElementInternalForce(double K[][6],double U[],double lanX[],double lanY[],double ee[][6],int I);// Calculate internal element force
void ELEMNT_FORCE_OUTPUT(double eleF[3][6],double ELE_FORCE[3][30],double SUM_ELE_FORCE[30],double u[],double sum_u[], int I);
double ABS(double);
double MAX_ABS(double A[],int n);
double MIN(double A[],int n);
double SQRT2(double D);
void MessageInitialData(double L,double H[],double EI,double EA,double Ultimate_Moment);
void MessageAnalysisReport();
void MessageErrorReportTEXT();
void MessageInputDataTEXT();
void MessageCheck_IMPORT_DATA01(double L,double Height[],double EI,double EA,double Ultimate_Moment);
void MessageResult(double A[],double B[5][6],int n);
void OUTPUT_excel(double A[4][6],double B[4],double C[4][30],int n);
void ANALYSIS(double Length,double Height[],double EI,double EA,double Ultimate_Moment);
void Distance(int);
void textcolor(int ForgC);
void DATE_TIME();
void OUTPUT_HTML_GRAPH(double X[],double Y[],int n,const char text1[],const char text2[],const char text3[]);
int main(){
double Length,EI,EA,Height[2],Ultimate_Moment;
IMPORT_DATA01(Length,Height,EA,EI,Ultimate_Moment);
MessageCheck_IMPORT_DATA01(Length,Height,EI,EA,Ultimate_Moment);
textcolor(14);
MessageInitialData(Length,Height,EI,EA,Ultimate_Moment);
textcolor(11);
MessageAnalysisReport();
ANALYSIS(Length,Height,EI,EA,Ultimate_Moment);
getch();
return 0;
}
void MatrixInverse(double A[][NN], double C[][NN],int n){
int i,j,l;
double c_A[n][n],B[n][n],m,Sum;
for (i=0;i<n;i++)
for (j=0;j<n;j++)
c_A[i][j]=A[i][j];
// Inverse [Kinit]
for (i=0;i<n;i++)
for (j=0;j<n;j++){
if (i==j)
B[i][j]=1;
else
B[i][j]=0;
}
for (j=0;j<n-1;j++)
for (i=j+1;i<n;i++){
m=c_A[i][j]/c_A[j][j];
for (l=0;l<n;l++){
c_A[i][l] -= m*c_A[j][l];
B[i][l] -= m*B[j][l];
}
}
// backward substitutions
for (i=n-1;i>=0;i--)
for (j=0;j<n;j++){
Sum=0;
for (l=i+1;l<n;l++)
Sum += c_A[i][l]*C[l][j];
C[i][j]=(B[i][j]-Sum)/c_A[i][i];
}
}
void ElementInternalForce(double K[][6],double U[],double lanX[],double lanY[],double ee[][6],int I){
double lan[6][6],UU[6],ff,ll[6][6];
int II;
lan[0][0]=lanX[I];lan[0][1]=lanY[I];lan[0][2]=0;lan[0][3]=0;lan[0][4]=0;lan[0][5]=0;
lan[1][0]=-lanY[I];lan[1][1]=lanX[I];lan[1][2]=0;lan[1][3]=0;lan[1][4]=0;lan[1][5]=0;
lan[2][0]=0;lan[2][1]=0;lan[2][2]=1;lan[2][3]=0;lan[2][4]=0;lan[2][5]=0;
lan[3][0]=0;lan[3][1]=0;lan[3][2]=0;lan[3][3]=lanX[I];lan[3][4]=lanY[I];lan[3][5]=0;
lan[4][0]=0;lan[4][1]=0;lan[4][2]=0;lan[4][3]=-lanY[I];lan[4][4]=lanX[I];lan[4][5]=0;
lan[5][0]=0;lan[5][1]=0;lan[5][2]=0;lan[5][3]=0;lan[5][4]=0;lan[5][5]=1;
if (I == 0){
UU[0]=0;UU[1]=0;UU[2]=0;UU[3]=U[0];UU[4]=U[1];UU[5]=U[2];
}
if (I == 1){
UU[0]=0;UU[1]=0;UU[2]=0;UU[3]=U[3];UU[4]=U[4];UU[5]=U[5];
}
if (I == 2){
UU[0]=U[0];UU[1]=U[1];UU[2]=U[2];UU[3]=U[3];UU[4]=U[4];UU[5]=U[5];
}
int i,j;
for (i=0;i<6;i++)
for (j=0;j<6;j++)
ll[i][j]=0;
// [f] = [K] *[lan]* [u]
Matrix_Multiplication(K,lan,ll);
for (i=0; i<6; i++){
ff=0;
for (j=0; j<6; j++)
ff += ll[i][j]*UU[j];
ee[I][i] = ff;
}
}
void MatrixMulti01(double A[][NN], double B[], double C[],int n){
int i,j;
double ff;
// [u] = [Kinv] * [f]
for (i=0; i<n; i++)
{
ff=0;
for (j=0; j<n; j++)
ff += A[i][j]*B[j];
C[i] = ff;
}
}
double ABS(double B){
if (B < 0)
B = -B;//Absolute number
else
B = B;
return B;
}
double MIN(double A[],int n){
int i;
double Cmin;
Cmin = A[0];
// Max of abs
for (i=0;i<n;i++){
if(Cmin > A[i])
Cmin = A[i];
}
return Cmin;
}
void Distance(int i){
if (i < 10)
printf("bt");
if (i >= 10 && i <= 99)
printf("btb");
if (i >= 100 && i <= 999)
printf("btbb");
if (i >= 1000 && i <= 9999)
printf("btbbb");
if (i >= 10000 && i <= 20000)
printf("btbbbb");
}
void MessageInitialData(double L,double H[],double EI,double EA,double Ultimate_Moment){
char Qa,Qb,Qc,Qd,Qe,Qf,Qg,Qk;
int i;
Qa=201;Qb=205;Qc=187;Qd=200;Qe=188,Qf=186,Qg=204,Qk=185;
printf("tttt%c",Qa);
for (i=1;i<69;i++)
printf("%c",Qb);
printf("%cn",Qc);
printf("tttt%c >> IN THE NAME OF GOD << %cn",Qf,Qf);
printf("tttt%c Nonlinear Analysis of Frame and Brace with Hinge by Hinge Method %cn",Qf,Qf);
printf("tttt%c UNIT: Free Unit %cn",Qf,Qf);
printf("tttt%c",Qg);
for (i=1;i<69;i++)
printf("%c",Qb);
printf("%cn",Qk);
printf("tttt%c This program is written by Salar Delavar Ghashghaei %cn",Qf,Qf);
printf("tttt%c E-mail: salar.d.ghashghaei@gmail.com %cn",Qf,Qf);
printf("tttt%c",Qd);
for (i=1;i<69;i++)
printf("%c",Qb);
printf("%cn",Qe);
MessageInputDataTEXT();
printf(" Length of Frame: %.3en",L);
printf(" Height of Column 1: %.3en",H[0]);
printf(" Height of Column 2: %.3en",H[1]);
printf(" Section flextural rigidity - EI: %.3en",EI);
printf(" Section axial rigidity - EA: %.3en",EA);
printf(" Section ultimate capacity moment: %.3en",Ultimate_Moment);
}
void MessageAnalysisReport(){
int i;
char Ql=176;
printf("n ");
for (i=1;i<64;i++)](https://crownmelresort.com/image.slidesharecdn.com/ywtoiclmr7mvt7yxgevo-signature-7909aa470f113a1c167e77875a4dfd9d2e15f6b96c4e85f722a896a967430206-poli-191110114946/75/Nonlinear-analysis-of-braced-frame-with-hinge-by-hinge-method-in-c-programming-2-2048.jpg)
![printf("%c",Ql);
printf(" Analysis Report ");
for (i=1;i<64;i++)
printf("%c",Ql);
printf("n");
}
void MessageCheck_IMPORT_DATA01(double L,double Height[],double EI,double EA,double Ultimate_Moment){
if ( L < 0 || Height[0] < 0 || Height[1] < 0 || EI < 0 || EA < 0 || Ultimate_Moment < 0 ){
MessageErrorReportTEXT();
printf(" Please check this file! -> [ PushoverHingeByHingeMethodFrameBrace-inputDATA.csv ]n");
printf(" *** Negative data input value is not acceptable ***n");
printf(" Length of Frame: %.3en",L);
printf(" Height of Column 1: %.3en",Height[0]);
printf(" Height of Column 2: %.3en",Height[1]);
printf(" Section flextural rigidity - EI: %.3en",EI);
printf(" Section axial rigidity - EA: %.3en",EA);
printf(" Section ultimate capacity moment: %.3en",Ultimate_Moment);
Sleep(40000);
exit(1);
}
}
void MessageErrorReportTEXT(){
int i;
char Ql;
Ql=176;
textcolor(12);
printf("an ");
for (i=1;i<50;i++)
printf("%c",Ql);
printf(" Error Report ");
for (i=1;i<50;i++)
printf("%c",Ql);
printf("n");
}
void MessageInputDataTEXT(){
int i;
char Ql=176;
printf("n ");
for (i=1;i<50;i++)
printf("%c",Ql);
printf(" Input Data ");
for (i=1;i<50;i++)
printf("%c",Ql);
printf("n");
}
void OUTPUT_excel(double A[4][6],double B[4],double C[4][30],int n){
// EXCEL OUTPUT
int i;
FILE *OutputFile;
OutputFile = fopen("PushoverHingeByHingeMethodFrameBrace-outputEXCEL.csv", "w");
fprintf(OutputFile," ### Nonlinear Analysis of Frame and Brace with Hinge by Hinge Method ###n");
fprintf(OutputFile,"Increment,Base Shear[DOF(1)]+[DOF(4)],Displacement [DOF(7)],Displacement [DOF(8)],Rotation [DOF(9)],Displacement [DOF(10)],Displacement [DOF(11)],Rotation [DOF(12)],Ele.1 [DOF(1)],Ele.1 [DOF(2)],Ele.1 [DOF(3)],Ele.1 [DOF(7)],Ele.1 [DOF(8)],Ele.1 [DOF(9)],Ele.2 [DOF(4)],Ele.2 [DOF(5)],Ele.2 [DOF(6)],Ele.2 [DOF(10)],Ele.2 [DOF(11)],Ele.2 [DOF(12)],Ele.3 [DOF(7)],Ele.3 [DOF(8)],Ele.3 [DOF(9)],Ele.3 [DOF(10)],Ele.3 [DOF(11)],Ele.3 [DOF(12)]n");
for(i=0;i<n;i++)
fprintf(OutputFile,"%d,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%en",i+1,B[i],A[i][0],A[i][1],A[i][2],A[i][3],A[i][4],A[i][5],C[i][0],C[i][1],C[i][2],C[i][3],C[i][4],C[i][5],C[i][6],C[i][7],C[i][8],C[i][9],C[i][10],C[i][11],C[i][12],C[i][13],C[i][14],C[i][15],C[i][16],C[i][17]);
fclose(OutputFile);
}
void MatrixDetermination(double A[][NN],int n){
// row operations
int i,j,k;
double Product,m,B[n][n];
for (i=0;i<n;i++)
for (j=0;j<n;j++)
B[i][j]=A[i][j];
for (k=0;k<n-1;k++)
for (i=k+1;i<n;i++){
m = B[i][k]/B[k][k];
for (j=0;j<n;j++)
B[i][j] -= m*B[k][j];
}
Product=1;
for (i=0;i<n;i++)
Product *= B[i][i];
// display results
if (Product == 0){
printf("ant ### it Seens that Golobal Matrix is singular or structure is unstable!!! ###n");
Sleep(40000);
exit(1);
}
}
void IMPORT_DATA01(double &Length,double Height[],double &EA,double &EI,double &Ultimate_Moment){
double Import_Data[6];
int i=0;
FILE *InputFile;
InputFile = fopen("PushoverHingeByHingeMethodFrameBrace-inputDATA.csv", "r");
if (!InputFile){
MessageErrorReportTEXT();
printf(" File is not available! -> [PushoverHingeByHingeMethodFrameBrace-inputDATA.csv] n");
Sleep(6000);
exit(1);
}
char line[100],a[100];
while(i < 6 && fgets(line,sizeof(line),InputFile) != NULL){
sscanf(line,"%s",a);
//printf("a[%d]: %sn",i,a);
Import_Data[i]= atof(a);
i++;
}
Length=Import_Data[0];
Height[0]=Import_Data[1];
Height[1]=Import_Data[2];
EI=Import_Data[3];
EA=Import_Data[4];
Ultimate_Moment=Import_Data[5];
}
void textcolor(int ForgC){
WORD wColor;
//This handle is needed to get the current background attribute
HANDLE hStdOut = GetStdHandle(STD_OUTPUT_HANDLE);
CONSOLE_SCREEN_BUFFER_INFO csbi;
//csbi is used for wAttributes word
if(GetConsoleScreenBufferInfo(hStdOut, &csbi)){
//To mask out all but the background attribute, and to add the color
wColor = (csbi.wAttributes & 0xF0) + (ForgC & 0x0F);
SetConsoleTextAttribute(hStdOut, wColor);
}
return;
}
void ANALYSIS(double Length,double Height[],double EI,double EA,double Ultimate_Moment){
int i,j;
double K[NN][NN],Kinv[NN][NN],eleF[5][6],ELE_FORCE[3][30],SUM_ELE_FORCE[30];
double L[Ne],lanX[Ne],lanY[Ne],AA[Ne],BB[Ne],CC[Ne],DD[Ne],EE[Ne],F[NN],u[6],sum_u[6],Mi[6];
double output_u[3][6],output_base[3];
double MS[6][6],KG[6][6],LANNDA[6],LANNDA_min;
double x[4],y[4];
for (i=0;i<NN;i++)
for (j=0;j<NN;j++)
K[i][j]=0;
for (i=0;i<NN;i++){
F[i]=0;u[i] = 0;sum_u[i] = 0;Mi[i] = 0;
}
for(int j=0;j<3;j++){
for(i=0;i<6*Ne;i++)
ELE_FORCE[j][i] = 0;
}
for(i=0;i<6*Ne;i++)
SUM_ELE_FORCE[i] = 0;
// SATAGE: 01
F[0]=1;
x[0] = 0;y[0] = 0;
x[1] = Length;y[1] = 0;
x[2] = 0+sum_u[0];y[2] = Height[0]+sum_u[1];
x[3] = Length+sum_u[3];y[3] = Height[1]+sum_u[4];
L[0] = SQRT2((x[2]-x[0])*(x[2]-x[0])+(y[2]-y[0])*(y[2]-y[0]));
L[1] = SQRT2((x[3]-x[1])*(x[3]-x[1])+(y[3]-y[1])*(y[3]-y[1]));
L[2] = SQRT2((x[3]-x[2])*(x[3]-x[2])+(y[3]-y[2])*(y[3]-y[2]));
L[3] = SQRT2((x[3]-x[0])*(x[3]-x[0])+(y[3]-y[0])*(y[3]-y[0]));
L[4] = SQRT2((x[2]-x[1])*(x[2]-x[1])+(y[2]-y[1])*(y[2]-y[1]));
lanX[0] = (x[2]-x[0])/L[0];lanY[0] = (y[2]-y[0])/L[0];
lanX[1] = (x[3]-x[1])/L[1];lanY[1] = (y[3]-y[1])/L[1];
lanX[2] = (x[3]-x[2])/L[2];lanY[2] = (y[3]-y[2])/L[2];
lanX[3] = (x[3]-x[0])/L[3];lanY[3] = (y[3]-y[0])/L[3];
lanX[4] = (x[2]-x[1])/L[4];lanY[4] = (y[2]-y[1])/L[4];
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,1);
K[0][0]= KG[3][3];//DOF(7)
K[0][1]= KG[3][4];//DOF(7)
K[0][2]= KG[3][5];//DOF(7)
K[1][0]= KG[4][3];//DOF(8)
K[1][1]= KG[4][4];//DOF(8)
K[1][2]= KG[4][5];//DOF(8)
K[2][0]= KG[5][3];//DOF(9)
K[2][1]= KG[5][4];//DOF(9)
K[2][2]= KG[5][5];//DOF(9)
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1);
K[3][3]= KG[3][3];//DOF(10)
K[3][4]= KG[3][4];//DOF(10)
K[3][5]= KG[3][5];//DOF(10)
K[4][3]= KG[4][3];//DOF(11)
K[4][4]= KG[4][4];//DOF(11)
K[4][5]= KG[4][5];//DOF(11)
K[5][3]= KG[5][3];//DOF(12)
K[5][4]= KG[5][4];//DOF(12)
K[5][5]= KG[5][5];//DOF(12)
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,1);
K[0][0]+= KG[0][0];//DOF(7)
K[0][1]+= KG[0][1];//DOF(7)
K[0][2]+= KG[0][2];//DOF(7)
K[1][0]+= KG[1][0];//DOF(8)
K[1][1]+= KG[1][1];//DOF(8)
K[1][2]+= KG[1][2];//DOF(8)](https://crownmelresort.com/image.slidesharecdn.com/ywtoiclmr7mvt7yxgevo-signature-7909aa470f113a1c167e77875a4dfd9d2e15f6b96c4e85f722a896a967430206-poli-191110114946/75/Nonlinear-analysis-of-braced-frame-with-hinge-by-hinge-method-in-c-programming-3-2048.jpg)
![K[2][0]+= KG[2][0];//DOF(9)
K[2][1]+= KG[2][1];//DOF(9)
K[2][2]+= KG[2][2];//DOF(9)
K[3][3]+= KG[3][3];//DOF(10)
K[3][4]+= KG[3][4];//DOF(10)
K[3][5]+= KG[3][5];//DOF(10)
K[4][3]+= KG[4][3];//DOF(11)
K[4][4]+= KG[4][4];//DOF(11)
K[4][5]+= KG[4][5];//DOF(11)
K[5][3]+= KG[5][3];//DOF(12)
K[5][4]+= KG[5][4];//DOF(12)
K[5][5]+= KG[5][5];//DOF(12)
K[0][3]= KG[0][3];//DOF(7)
K[0][4]= KG[0][4];//DOF(7)
K[0][5]= KG[0][5];//DOF(7)
K[1][3]= KG[1][3];//DOF(8)
K[1][4]= KG[1][4];//DOF(8)
K[1][5]= KG[1][5];//DOF(8)
K[2][3]= KG[2][3];//DOF(9)
K[2][4]= KG[2][4];//DOF(9)
K[2][5]= KG[2][5];//DOF(9)
K[3][0]= KG[3][0];//DOF(10)
K[3][1]= KG[3][1];//DOF(10)
K[3][2]= KG[3][2];//DOF(10)
K[4][0]= KG[4][0];//DOF(11)
K[4][1]= KG[4][1];//DOF(11)
K[4][2]= KG[4][2];//DOF(11)
K[5][0]= KG[5][0];//DOF(12)
K[5][1]= KG[5][1];//DOF(12)
K[5][2]= KG[5][2];//DOF(12)
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,3,4);
K[3][3]+= KG[3][3];//DOF(10)
K[3][4]+= KG[3][4];//DOF(10)
K[3][5]+= KG[3][5];//DOF(10)
K[4][3]+= KG[4][3];//DOF(11)
K[4][4]+= KG[4][4];//DOF(11)
K[4][5]+= KG[4][5];//DOF(11)
K[5][3]+= KG[5][3];//DOF(12)
K[5][4]+= KG[5][4];//DOF(12)
K[5][5]+= KG[5][5];//DOF(12)
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,4,4);
K[0][0]+= KG[3][3];//DOF(7)
K[0][1]+= KG[3][4];//DOF(7)
K[0][2]+= KG[3][5];//DOF(7)
K[1][0]+= KG[4][3];//DOF(8)
K[1][1]+= KG[4][4];//DOF(8)
K[1][2]+= KG[4][5];//DOF(8)
K[2][0]+= KG[5][3];//DOF(9)
K[2][1]+= KG[5][4];//DOF(9)
K[2][2]+= KG[5][5];//DOF(9)
MatrixDetermination(K,NN);
MatrixInverse(K,Kinv,NN);// Inverse [Kinit]
MatrixMulti01(Kinv,F,u,NN);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,0);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,1);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,2);
LANNDA[0]=(Ultimate_Moment-ABS(Mi[0]))/ABS(eleF[0][2]);
LANNDA[1]=(Ultimate_Moment-ABS(Mi[1]))/ABS(eleF[0][5]);
LANNDA[2]=(Ultimate_Moment-ABS(Mi[2]))/ABS(eleF[1][2]);
LANNDA[3]=(Ultimate_Moment-ABS(Mi[3]))/ABS(eleF[1][5]);
LANNDA[4]=(Ultimate_Moment-ABS(Mi[4]))/ABS(eleF[2][2]);
LANNDA[5]=(Ultimate_Moment-ABS(Mi[5]))/ABS(eleF[2][5]);
LANNDA_min = MIN(LANNDA,6);
for (i=0;i<NN;i++)
u[i]=LANNDA_min*u[i];
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,0);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,1);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,2);
Mi[0]=eleF[0][2];
Mi[1]=eleF[0][5];
Mi[2]=eleF[1][2];
Mi[3]=eleF[1][5];
Mi[4]=eleF[2][2];
Mi[5]=eleF[2][5];
ELEMNT_FORCE_OUTPUT(eleF,ELE_FORCE,SUM_ELE_FORCE,u,sum_u,0);
for (i=0;i<NN;i++)
output_u[0][i]=sum_u[i];//output displacement
output_base[0]=-SUM_ELE_FORCE[1]-SUM_ELE_FORCE[7]-SUM_ELE_FORCE[19]-SUM_ELE_FORCE[25];//output base shear
// So plastic hinge has formed in 1 node
// SATAGE: 02
x[0] = 0;y[0] = 0;
x[1] = Length;y[1] = 0;
x[2] = 0+sum_u[0];y[2] = Height[0]+sum_u[1];
x[3] = Length+sum_u[3];y[3] = Height[1]+sum_u[4];
L[0] = SQRT2((x[2]-x[0])*(x[2]-x[0])+(y[2]-y[0])*(y[2]-y[0]));
L[1] = SQRT2((x[3]-x[1])*(x[3]-x[1])+(y[3]-y[1])*(y[3]-y[1]));
L[2] = SQRT2((x[3]-x[2])*(x[3]-x[2])+(y[3]-y[2])*(y[3]-y[2]));
L[3] = SQRT2((x[3]-x[0])*(x[3]-x[0])+(y[3]-y[0])*(y[3]-y[0]));
L[4] = SQRT2((x[2]-x[1])*(x[2]-x[1])+(y[2]-y[1])*(y[2]-y[1]));
lanX[0] = (x[2]-x[0])/L[0];lanY[0] = (y[2]-y[0])/L[0];
lanX[1] = (x[3]-x[1])/L[1];lanY[1] = (y[3]-y[1])/L[1];
lanX[2] = (x[3]-x[2])/L[2];lanY[2] = (y[3]-y[2])/L[2];
lanX[3] = (x[3]-x[0])/L[3];lanY[3] = (y[3]-y[0])/L[3];
lanX[4] = (x[2]-x[1])/L[4];lanY[4] = (y[2]-y[1])/L[4];
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,2);
K[0][0]= KG[3][3];//DOF(7)
K[0][1]= KG[3][4];//DOF(7)
K[0][2]= KG[3][5];//DOF(7)
K[1][0]= KG[4][3];//DOF(8)
K[1][1]= KG[4][4];//DOF(8)
K[1][2]= KG[4][5];//DOF(8)
K[2][0]= KG[5][3];//DOF(9)
K[2][1]= KG[5][4];//DOF(9)
K[2][2]= KG[5][5];//DOF(9)
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1);
K[3][3]= KG[3][3];//DOF(10)
K[3][4]= KG[3][4];//DOF(10)
K[3][5]= KG[3][5];//DOF(10)
K[4][3]= KG[4][3];//DOF(11)
K[4][4]= KG[4][4];//DOF(11)
K[4][5]= KG[4][5];//DOF(11)
K[5][3]= KG[5][3];//DOF(12)
K[5][4]= KG[5][4];//DOF(12)
K[5][5]= KG[5][5];//DOF(12)
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,1);
K[0][0]+= KG[0][0];//DOF(7)
K[0][1]+= KG[0][1];//DOF(7)
K[0][2]+= KG[0][2];//DOF(7)
K[1][0]+= KG[1][0];//DOF(8)
K[1][1]+= KG[1][1];//DOF(8)
K[1][2]+= KG[1][2];//DOF(8)
K[2][0]+= KG[2][0];//DOF(9)
K[2][1]+= KG[2][1];//DOF(9)
K[2][2]+= KG[2][2];//DOF(9)
K[3][3]+= KG[3][3];//DOF(10)
K[3][4]+= KG[3][4];//DOF(10)
K[3][5]+= KG[3][5];//DOF(10)
K[4][3]+= KG[4][3];//DOF(11)
K[4][4]+= KG[4][4];//DOF(11)
K[4][5]+= KG[4][5];//DOF(11)
K[5][3]+= KG[5][3];//DOF(12)
K[5][4]+= KG[5][4];//DOF(12)
K[5][5]+= KG[5][5];//DOF(12)
K[0][3]= KG[0][3];//DOF(7)
K[0][4]= KG[0][4];//DOF(7)
K[0][5]= KG[0][5];//DOF(7)
K[1][3]= KG[1][3];//DOF(8)
K[1][4]= KG[1][4];//DOF(8)
K[1][5]= KG[1][5];//DOF(8)
K[2][3]= KG[2][3];//DOF(9)
K[2][4]= KG[2][4];//DOF(9)
K[2][5]= KG[2][5];//DOF(9)
K[3][0]= KG[3][0];//DOF(10)
K[3][1]= KG[3][1];//DOF(10)
K[3][2]= KG[3][2];//DOF(10)
K[4][0]= KG[4][0];//DOF(11)
K[4][1]= KG[4][1];//DOF(11)
K[4][2]= KG[4][2];//DOF(11)
K[5][0]= KG[5][0];//DOF(12)
K[5][1]= KG[5][1];//DOF(12)
K[5][2]= KG[5][2];//DOF(12)](https://crownmelresort.com/image.slidesharecdn.com/ywtoiclmr7mvt7yxgevo-signature-7909aa470f113a1c167e77875a4dfd9d2e15f6b96c4e85f722a896a967430206-poli-191110114946/75/Nonlinear-analysis-of-braced-frame-with-hinge-by-hinge-method-in-c-programming-4-2048.jpg)
![Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,3,4);
K[3][3]+= KG[3][3];//DOF(10)
K[3][4]+= KG[3][4];//DOF(10)
K[3][5]+= KG[3][5];//DOF(10)
K[4][3]+= KG[4][3];//DOF(11)
K[4][4]+= KG[4][4];//DOF(11)
K[4][5]+= KG[4][5];//DOF(11)
K[5][3]+= KG[5][3];//DOF(12)
K[5][4]+= KG[5][4];//DOF(12)
K[5][5]+= KG[5][5];//DOF(12)
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,4,4);
K[0][0]+= KG[3][3];//DOF(7)
K[0][1]+= KG[3][4];//DOF(7)
K[0][2]+= KG[3][5];//DOF(7)
K[1][0]+= KG[4][3];//DOF(8)
K[1][1]+= KG[4][4];//DOF(8)
K[1][2]+= KG[4][5];//DOF(8)
K[2][0]+= KG[5][3];//DOF(9)
K[2][1]+= KG[5][4];//DOF(9)
K[2][2]+= KG[5][5];//DOF(9)
MatrixDetermination(K,NN);
MatrixInverse(K,Kinv,NN);// Inverse [Kinit]
MatrixMulti01(Kinv,F,u,NN);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,2);
ElementInternalForce(MS,u,lanX,lanY,eleF,0);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,1);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,2);
LANNDA[0]=1e+15;
LANNDA[1]=(Ultimate_Moment-ABS(Mi[1]))/ABS(eleF[0][5]);
LANNDA[2]=(Ultimate_Moment-ABS(Mi[2]))/ABS(eleF[1][2]);
LANNDA[3]=(Ultimate_Moment-ABS(Mi[3]))/ABS(eleF[1][5]);
LANNDA[4]=(Ultimate_Moment-ABS(Mi[4]))/ABS(eleF[2][2]);
LANNDA[5]=(Ultimate_Moment-ABS(Mi[5]))/ABS(eleF[2][5]);
LANNDA_min = MIN(LANNDA,6);
for (i=0;i<NN;i++)
u[i]=LANNDA_min*u[i];
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,2);
ElementInternalForce(MS,u,lanX,lanY,eleF,0);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,1);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,2);
Mi[0]=eleF[0][2];
Mi[1]=eleF[0][5];
Mi[2]=eleF[1][2];
Mi[3]=eleF[1][5];
Mi[4]=eleF[2][2];
Mi[5]=eleF[2][5];
ELEMNT_FORCE_OUTPUT(eleF,ELE_FORCE,SUM_ELE_FORCE,u,sum_u,1);
for (i=0;i<NN;i++)
output_u[1][i]=sum_u[i];//output displacement
output_base[1]=-SUM_ELE_FORCE[1]-SUM_ELE_FORCE[7]-SUM_ELE_FORCE[19]-SUM_ELE_FORCE[25];//output base shear
// So plastic hinge has formed in 3 node
// SATAGE: 03
x[0] = 0;y[0] = 0;
x[1] = Length;y[1] = 0;
x[2] = 0+sum_u[0];y[2] = Height[0]+sum_u[1];
x[3] = Length+sum_u[3];y[3] = Height[1]+sum_u[4];
L[0] = SQRT2((x[2]-x[0])*(x[2]-x[0])+(y[2]-y[0])*(y[2]-y[0]));
L[1] = SQRT2((x[3]-x[1])*(x[3]-x[1])+(y[3]-y[1])*(y[3]-y[1]));
L[2] = SQRT2((x[3]-x[2])*(x[3]-x[2])+(y[3]-y[2])*(y[3]-y[2]));
L[3] = SQRT2((x[3]-x[0])*(x[3]-x[0])+(y[3]-y[0])*(y[3]-y[0]));
L[4] = SQRT2((x[2]-x[1])*(x[2]-x[1])+(y[2]-y[1])*(y[2]-y[1]));
lanX[0] = (x[2]-x[0])/L[0];lanY[0] = (y[2]-y[0])/L[0];
lanX[1] = (x[3]-x[1])/L[1];lanY[1] = (y[3]-y[1])/L[1];
lanX[2] = (x[3]-x[2])/L[2];lanY[2] = (y[3]-y[2])/L[2];
lanX[3] = (x[3]-x[0])/L[3];lanY[3] = (y[3]-y[0])/L[3];
lanX[4] = (x[2]-x[1])/L[4];lanY[4] = (y[2]-y[1])/L[4];
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,4);
K[0][0]= KG[3][3];//DOF(7)
K[0][1]= KG[3][4];//DOF(7)
K[0][2]= KG[3][5];//DOF(7)
K[1][0]= KG[4][3];//DOF(8)
K[1][1]= KG[4][4];//DOF(8)
K[1][2]= KG[4][5];//DOF(8)
K[2][0]= KG[5][3];//DOF(9)
K[2][1]= KG[5][4];//DOF(9)
K[2][2]= KG[5][5];//DOF(9)
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1);
K[3][3]= KG[3][3];//DOF(10)
K[3][4]= KG[3][4];//DOF(10)
K[3][5]= KG[3][5];//DOF(10)
K[4][3]= KG[4][3];//DOF(11)
K[4][4]= KG[4][4];//DOF(11)
K[4][5]= KG[4][5];//DOF(11)
K[5][3]= KG[5][3];//DOF(12)
K[5][4]= KG[5][4];//DOF(12)
K[5][5]= KG[5][5];//DOF(12)
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,2);
K[0][0]+= KG[0][0];//DOF(7)
K[0][1]+= KG[0][1];//DOF(7)
K[0][2]+= KG[0][2];//DOF(7)
K[1][0]+= KG[1][0];//DOF(8)
K[1][1]+= KG[1][1];//DOF(8)
K[1][2]+= KG[1][2];//DOF(8)
K[2][0]+= KG[2][0];//DOF(9)
K[2][1]+= KG[2][1];//DOF(9)
K[2][2]+= KG[2][2];//DOF(9)
K[3][3]+= KG[3][3];//DOF(10)
K[3][4]+= KG[3][4];//DOF(10)
K[3][5]+= KG[3][5];//DOF(10)
K[4][3]+= KG[4][3];//DOF(11)
K[4][4]+= KG[4][4];//DOF(11)
K[4][5]+= KG[4][5];//DOF(11)
K[5][3]+= KG[5][3];//DOF(12)
K[5][4]+= KG[5][4];//DOF(12)
K[5][5]+= KG[5][5];//DOF(12)
K[0][3]= KG[0][3];//DOF(7)
K[0][4]= KG[0][4];//DOF(7)
K[0][5]= KG[0][5];//DOF(7)
K[1][3]= KG[1][3];//DOF(8)
K[1][4]= KG[1][4];//DOF(8)
K[1][5]= KG[1][5];//DOF(8)
K[2][3]= KG[2][3];//DOF(9)
K[2][4]= KG[2][4];//DOF(9)
K[2][5]= KG[2][5];//DOF(9)
K[3][0]= KG[3][0];//DOF(10)
K[3][1]= KG[3][1];//DOF(10)
K[3][2]= KG[3][2];//DOF(10)
K[4][0]= KG[4][0];//DOF(11)
K[4][1]= KG[4][1];//DOF(11)
K[4][2]= KG[4][2];//DOF(11)
K[5][0]= KG[5][0];//DOF(12)
K[5][1]= KG[5][1];//DOF(12)
K[5][2]= KG[5][2];//DOF(12)
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,3,4);
K[3][3]+= KG[3][3];//DOF(10)
K[3][4]+= KG[3][4];//DOF(10)
K[3][5]+= KG[3][5];//DOF(10)
K[4][3]+= KG[4][3];//DOF(11)
K[4][4]+= KG[4][4];//DOF(11)
K[4][5]+= KG[4][5];//DOF(11)
K[5][3]+= KG[5][3];//DOF(12)
K[5][4]+= KG[5][4];//DOF(12)
K[5][5]+= KG[5][5];//DOF(12)
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,4,4);
K[0][0]+= KG[3][3];//DOF(7)
K[0][1]+= KG[3][4];//DOF(7)
K[0][2]+= KG[3][5];//DOF(7)
K[1][0]+= KG[4][3];//DOF(8)
K[1][1]+= KG[4][4];//DOF(8)
K[1][2]+= KG[4][5];//DOF(8)
K[2][0]+= KG[5][3];//DOF(9)
K[2][1]+= KG[5][4];//DOF(9)
K[2][2]+= KG[5][5];//DOF(9)
MatrixDetermination(K,NN);
MatrixInverse(K,Kinv,NN);// Inverse [Kinit]
MatrixMulti01(Kinv,F,u,NN);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,4);
ElementInternalForce(MS,u,lanX,lanY,eleF,0);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,1);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,2);
ElementInternalForce(MS,u,lanX,lanY,eleF,2);
LANNDA[0]=(Ultimate_Moment-ABS(Mi[0]))/ABS(eleF[0][2]);
LANNDA[1]=(Ultimate_Moment-ABS(Mi[1]))/ABS(eleF[0][5]);
LANNDA[2]=(Ultimate_Moment-ABS(Mi[2]))/ABS(eleF[1][2]);
LANNDA[3]=(Ultimate_Moment-ABS(Mi[3]))/ABS(eleF[1][5]);
LANNDA[4]=(Ultimate_Moment-ABS(Mi[4]))/ABS(eleF[2][2]);
LANNDA[5]=(Ultimate_Moment-ABS(Mi[5]))/ABS(eleF[2][5]);
LANNDA_min = MIN(LANNDA,6);](https://crownmelresort.com/image.slidesharecdn.com/ywtoiclmr7mvt7yxgevo-signature-7909aa470f113a1c167e77875a4dfd9d2e15f6b96c4e85f722a896a967430206-poli-191110114946/75/Nonlinear-analysis-of-braced-frame-with-hinge-by-hinge-method-in-c-programming-5-2048.jpg)
![for (i=0;i<NN;i++)
u[i]=LANNDA_min*u[i];
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,4);
ElementInternalForce(MS,u,lanX,lanY,eleF,0);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1);
ElementInternalForce(MS,u,lanX,lanY,eleF,1);
Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,2);
ElementInternalForce(MS,u,lanX,lanY,eleF,2);
Mi[0]=eleF[0][2];
Mi[1]=eleF[0][5];
Mi[2]=eleF[1][2];
Mi[3]=eleF[1][5];
Mi[4]=eleF[2][2];
Mi[5]=eleF[2][5];
ELEMNT_FORCE_OUTPUT(eleF,ELE_FORCE,SUM_ELE_FORCE,u,sum_u,2);
for (i=0;i<NN;i++)
output_u[2][i]=sum_u[i];//output displacement
output_base[2]=-SUM_ELE_FORCE[1]-SUM_ELE_FORCE[7]-SUM_ELE_FORCE[19]-SUM_ELE_FORCE[25];//output base shear
// So plastic hinge has formed in 3 node
MessageResult(output_base,output_u,3);
MatrixDetermination(K,NN);
OUTPUT_excel(output_u,output_base,ELE_FORCE,2);
char text1[30]="Base Shear-Displacement Graph",text2[30]="Displacement [DOF(7)]",text3[30]="Base Shear [DOF(1)]+[DOF(4)]";
double X[2],Y[2];
for (i=0;i<2;i++){
X[i] = output_u[i][0];// Disp. DOF(7)
Y[i] = output_base[i];// Base Shear DOF(1)+DOF(4)
}
OUTPUT_HTML_GRAPH(X,Y,2,text1,text2,text3);
textcolor(15);
//printf("na - %s -n",ShowText01);
system("start /w Graph-outputHTML.html");
textcolor(15);
printf("na - Output data is written in Excel file -n");
DATE_TIME();
}
void DATE_TIME(){
printf("nt");
system("echo %date%");
printf("t");
system("echo %time%");
}
void Matrix_Stiffness(double EA,double EI,double L[],double lanX[],double lanY[],double A[],double B[],double C[],double D[],double E[],double K[][6],double K_G[][6],int I,int II){
double lan[6][6],lan_Tr[6][6],ans[6][6];
A[I] = 4*EI/L[I];
B[I] = 6*EI/(L[I]*L[I]);
C[I] = 2*EI/L[I];
D[I] = 12*EI/(L[I]*L[I]*L[I]);
E[I] = EA/L[I];
for (int i=0;i<6;i++)
for (int j=0;j<6;j++)
K[i][j] = 0;
//I:2 number of element - II: kind of stiffness matrix
if (II==1){// No plastic hinge
K[0][0]=E[I];K[0][1]=0;K[0][2]=0;K[0][3]=-E[I];K[0][4]=0;K[0][5]=0;
K[1][0]=0;K[1][1]=D[I];K[1][2]=B[I];K[1][3]=0;K[1][4]=-D[I];K[1][5]=B[I];
K[2][0]=0;K[2][1]=B[I];K[2][2]=A[I];K[2][3]=0;K[2][4]=-B[I];K[2][5]=C[I];
K[3][0]=-E[I];K[3][1]=0;K[3][2]=0;K[3][3]=E[I];K[3][4]=0;K[3][5]=0;
K[4][0]=0;K[4][1]=-D[I];K[4][2]=-B[I];K[4][3]=0;K[4][4]=D[I];K[4][5]=-B[I];
K[5][0]=0;K[5][1]=B[I];K[5][2]=C[I];K[5][3]=0;K[5][4]=-B[I];K[5][5]=A[I];
}
if (II==2){// plastic hinge at i
K[0][0]=E[I];K[0][1]=0;K[0][2]=0;K[0][3]=-E[I];K[0][4]=0;K[0][5]=0;
K[1][0]=0;K[1][1]=.25*D[I];K[1][2]=0;K[1][3]=0;K[1][4]=-.25*D[I];K[1][5]=.5*B[I];
K[2][0]=0;K[2][1]=0;K[2][2]=0;K[2][3]=0;K[2][4]=0;K[2][5]=0;
K[3][0]=-E[I];K[3][1]=0;K[3][2]=0;K[3][3]=E[I];K[3][4]=0;K[3][5]=0;
K[4][0]=0;K[4][1]=-.25*D[I];K[4][2]=0;K[4][3]=0;K[4][4]=.25*D[I];K[4][5]=-.5*B[I];
K[5][0]=0;K[5][1]=.5*B[I];K[5][2]=0;K[5][3]=0;K[5][4]=-.5*B[I];K[5][5]=(3/4)*A[I];
}
if (II==3){// plastic hinge at j
K[0][0]=E[I];K[0][1]=0;K[0][2]=0;K[0][3]=-E[I];K[0][4]=0;K[0][5]=0;
K[1][0]=0;K[1][1]=.25*D[I];K[1][2]=.5*B[I];K[1][3]=0;K[1][4]=-.25*D[I];K[1][5]=0;
K[2][0]=0;K[2][1]=.5*B[I];K[2][2]=(3/4)*A[I];K[2][3]=0;K[2][4]=-.5*B[I];K[2][5]=0;
K[3][0]=-E[I];K[3][1]=0;K[3][2]=0;K[3][3]=E[I];K[3][4]=0;K[3][5]=0;
K[4][0]=0;K[4][1]=-.25*D[I];K[4][2]=-.5*B[I];K[4][3]=0;K[4][4]=.25*D[I];K[4][5]=0;
K[5][0]=0;K[5][1]=0;K[5][2]=0;K[5][3]=0;K[5][4]=0;K[5][5]=0;
}
if (II==4){// plastic hinge at i and j
K[0][0]=E[I];K[0][1]=0;K[0][2]=0;K[0][3]=-E[I];K[0][4]=0;K[0][5]=0;
K[1][0]=0;K[1][1]=0;K[1][2]=0;K[1][3]=0;K[1][4]=0;K[1][5]=0;
K[2][0]=0;K[2][1]=0;K[2][2]=0;K[2][3]=0;K[2][4]=0;K[2][5]=0;
K[3][0]=-E[I];K[3][1]=0;K[3][2]=0;K[3][3]=E[I];K[3][4]=0;K[3][5]=0;
K[4][0]=0;K[4][1]=0;K[4][2]=0;K[4][3]=0;K[4][4]=0;K[4][5]=0;
K[5][0]=0;K[5][1]=0;K[5][2]=0;K[5][3]=0;K[5][4]=0;K[5][5]=0;
}
lan[0][0]=lanX[I];lan[0][1]=lanY[I];lan[0][2]=0;lan[0][3]=0;lan[0][4]=0;lan[0][5]=0;
lan[1][0]=-lanY[I];lan[1][1]=lanX[I];lan[1][2]=0;lan[1][3]=0;lan[1][4]=0;lan[1][5]=0;
lan[2][0]=0;lan[2][1]=0;lan[2][2]=1;lan[2][3]=0;lan[2][4]=0;lan[2][5]=0;
lan[3][0]=0;lan[3][1]=0;lan[3][2]=0;lan[3][3]=lanX[I];lan[3][4]=lanY[I];lan[3][5]=0;
lan[4][0]=0;lan[4][1]=0;lan[4][2]=0;lan[4][3]=-lanY[I];lan[4][4]=lanX[I];lan[4][5]=0;
lan[5][0]=0;lan[5][1]=0;lan[5][2]=0;lan[5][3]=0;lan[5][4]=0;lan[5][5]=1;
Matrix_Transpose(lan,lan_Tr);
Matrix_Multiplication(lan_Tr,K,ans);
Matrix_Multiplication(ans,lan,K_G);
}
void ELEMNT_FORCE_OUTPUT(double eleF[5][6],double ELE_FORCE[4][30],double SUM_ELE_FORCE[30],double u[],double sum_u[], int I){
int i;
for (i=0;i<6;i++)
ELE_FORCE[I][i]=eleF[0][i];
for (i=6;i<12;i++)
ELE_FORCE[I][i]=eleF[1][i-6];
for (i=12;i<18;i++)
ELE_FORCE[I][i]=eleF[2][i-12];
for (i=18;i<24;i++)
ELE_FORCE[I][i]=eleF[3][i-18];
for (i=24;i<30;i++)
ELE_FORCE[I][i]=eleF[4][i-24];
for (i=0;i<6*Ne;i++)
SUM_ELE_FORCE[i] += ELE_FORCE[I][i];
for (i=0;i<NN;i++)
sum_u[i] += u[i];
}
double SQRT2(double D){
int it,itermax;
double residual,tolerance,x,dx,dx_ABS,f,df;
it = 0; // initialize iteration count
itermax = 100000;
residual = 100; // initialize residual
tolerance = 1e-8;
x = 1;// initialize answer
while (residual > tolerance){
f = x*x - D;
df = 2 * x;
dx = f/df;
x= x - dx;
residual = ABS(dx); // abs residual
it = it + 1; // increment iteration count
//printf("f: %f -tdx: %f -tresidual: %fn",f,dx,residual);
if (it == itermax){
//printf("tSQRT2(number,power) : SQRT2(%f) - iteration: %d -> ## The solution is not converged ##n",D,it);
break;
}
}
if (it < itermax){
//printf("tSQRT(number,power) - SQRT(%f,%f) : %f n",D,n, x);
return x;
}
}
void Matrix_Transpose(double A[6][6],double B[6][6]){
int i,j;
for (i=0;i<6;i++)
for (j=0;j<6;j++)
B[j][i]=A[i][j];
}
void Matrix_Multiplication(double A[6][6],double B[6][6],double C[6][6]){
int i,j,k;
double sum;
for (i=0;i<6;i++)
for (j=0;j<6;j++){
sum=0;
for (k=0;k<6;k++)
sum += A[i][k]*B[k][j];
C[i][j] = sum;
}
}
void MessageResult(double A[],double B[5][6],int n){
int i;
printf("t ");
for (i=0;i<147;i++)
printf("-");
printf("n");
printf("t Increment Base Shear[DOF(1)]+[DOF(4)] Disp. [DOF(7)] Disp. [DOF(8)] Rotation [DOF(9)] Disp. [DOF(10)] Disp. [DOF(11)] Rotation [DOF(12)]n");
printf("t ");
for (i=0;i<147;i++)
printf("-");
printf("n");
for (i=0;i<n;i++)
printf("tt %dtt %.3et %.3et%.3et %.3et %.3e %.3et %.3en",i+1,A[i],B[i][0],B[i][1],B[i][2],B[i][3],B[i][4],B[i][5]);
}
void OUTPUT_HTML_GRAPH(double X[],double Y[],int n,const char text1[],const char text2[],const char text3[]){
// HTML GRAPH OUTPUT
int i;
double x,y,Xnew[3],Ynew[3],NorX[3],NorY[3],Xmax,Ymax;
Xmax=MAX_ABS(X,n);
Ymax=MAX_ABS(Y,n);
Xnew[0]=0;Ynew[0]=0;
for (i=0;i<n;i++){
Xnew[i+1] = ABS(X[i]);
Ynew[i+1] = ABS(Y[i]);
}
for (i=0;i<n+1;i++){
NorX[i] = Xnew[i]/Xmax;
NorY[i] = Ynew[i]/Ymax;
//printf("t %f %f n",NorX[i],NorY[i]);
}
FILE *OutputFile;
OutputFile = fopen(ShowText01, "w");
fprintf(OutputFile,"<!DOCTYPE HTML><html><body style="background-color:black;"><font color="white"><head><script> n");
fprintf(OutputFile,"window.onload = function(){ n");
fprintf(OutputFile,"var canvas = document.getElementById("myCanvas");var s1 = canvas.getContext("2d");var s2 = canvas.getContext('2d'); n");
fprintf(OutputFile,"var s3 = canvas.getContext("2d");var s4 = canvas.getContext("2d");var s5 = canvas.getContext("2d"); n");
fprintf(OutputFile,"var x=120,y=100,X,Y,Lx=1100,Ly=500,i; n");
fprintf(OutputFile,"s3.beginPath();s3.lineWidth = 3;s3.strokeStyle = "cyan";s3.rect(x,y,Lx,Ly); n");
fprintf(OutputFile,"for(i=0;i<9;i++){s3.moveTo(x+Lx*(i+1)*.1,y+Ly);s3.lineTo(x+Lx*(i+1)*.1,y+Ly-10);}; n");](https://crownmelresort.com/image.slidesharecdn.com/ywtoiclmr7mvt7yxgevo-signature-7909aa470f113a1c167e77875a4dfd9d2e15f6b96c4e85f722a896a967430206-poli-191110114946/75/Nonlinear-analysis-of-braced-frame-with-hinge-by-hinge-method-in-c-programming-6-2048.jpg)
![fprintf(OutputFile,"for(i=0;i<9;i++){s3.moveTo(x,y+Ly*(i+1)*.1);s3.lineTo(x+10,y+Ly*(i+1)*.1);};s3.stroke();n");
fprintf(OutputFile,"s1.beginPath();s1.lineWidth = 3;s1.strokeStyle = "yellow"; n");
for (i=0;i<n;i++){
fprintf(OutputFile,"s1.moveTo(%f,%f);",120+NorX[i]*1100,100+500-NorY[i]*500);
fprintf(OutputFile,"s1.lineTo(%f,%f); n",120+NorX[i+1]*1100,100+500-NorY[i+1]*500);
}
fprintf(OutputFile,"s1.stroke(); n");
fprintf(OutputFile,"s2.beginPath();s2.lineWidth = 1;s2.strokeStyle = "cyan";s2.setLineDash([5, 5]); n");
fprintf(OutputFile,"for(i=0;i<19;i++){s2.moveTo(x+Lx*(i+1)*.05,y);s2.lineTo(x+Lx*(i+1)*.05,y+Ly);} n");
fprintf(OutputFile,"s2.lineWidth = 1;s2.strokeStyle = "cyan";for(i=0;i<19;i++){s2.moveTo(x,y+Ly*(i+1)*.05);s2.lineTo(x+Lx,y+Ly*(i+1)*.05);} s2.stroke();n");
fprintf(OutputFile,"X=x+.25*Lx;Y=.7*y;s4.translate(X,Y);s4.font="50px serif";s4.fillStyle = "#7fff00";s4.fillText("%s",0,0); n",text1);
fprintf(OutputFile,"s4.save();X=-X+.2*x;Y=-Y+y+.6*Ly;s4.translate(X,Y);s4.rotate(3*Math.PI/2);s4.font="15px serif"; n");
fprintf(OutputFile,"s4.fillStyle = "#7fff00";s4.textAlign = "left";s4.fillText("%s",0,0);s4.restore(); n",text3);
fprintf(OutputFile,"s4.save();X=.2*Lx;Y=y+Ly-20;s4.translate(X,Y);s4.rotate(2*Math.PI);s4.font="15px serif";s4.fillStyle = "#7fff00"; n");
fprintf(OutputFile,"s4.textAlign = "left";s4.fillText("%s",0,0);s4.restore(); n",text2);
for(i=0;i<10;i++){
x=.1*(i+1)*Xmax;
fprintf(OutputFile,"s5.save();X=-.29*Lx+Lx*(%d+1)*.1;Y=.3*y+Ly+20;s5.rotate(2*Math.PI);s5.font="16px serif"; n",i);
fprintf(OutputFile,"s5.fillStyle = "#7fff00";s5.textAlign = "left";s5.fillText("%.3e",X,Y);s5.restore(); n",x);
}
for(i=0;i<10;i++){
y=.1*(i+1)*Ymax;
fprintf(OutputFile,"s5.save();X=-.28*Lx-50;Y=Ly+.3*y-Ly*(%d+1)*.1;s5.rotate(2*Math.PI);s5.font="16px serif"; n",i);
fprintf(OutputFile,"s5.fillStyle = "#7fff00";s5.textAlign = "left";s5.fillText("%.3e",X,Y);s5.restore(); n",y);
}
fprintf(OutputFile,"s5.save();X=-.25*Lx;Y=.3*y+Ly+20;s5.rotate(2*Math.PI);s5.font="16px serif";s5.fillStyle = "#7fff00";s5.fillText(0,X,Y);s5.restore(); n");
fprintf(OutputFile,"s5.save();X=-.25*Lx-50;Y=Ly+.3*y;s5.rotate(2*Math.PI);s5.font="16px serif";s5.fillStyle = "#7fff00";s5.textAlign = "left";s5.fillText(0,X,Y);s5.restore();}; n");
fprintf(OutputFile,"</script></head><body><canvas id="myCanvas" width="1300" height="1300" style="border:1px solid black;"></canvas></body></html> n");
fclose(OutputFile);
}
double MAX_ABS(double A[],int n){
int i;
double B[2];
double Amax;
// abs value
for (i=0;i<n;i++){
B[i] = A[i];
if(B[i] < 0)
B[i] = -B[i];
}
// Max of abs
Amax = B[0];
for (i=1;i<n;i++){
if(Amax < B[i])
Amax = B[i];
}
return Amax;
}
Plot :
Figure(1) Analysis file](https://crownmelresort.com/image.slidesharecdn.com/ywtoiclmr7mvt7yxgevo-signature-7909aa470f113a1c167e77875a4dfd9d2e15f6b96c4e85f722a896a967430206-poli-191110114946/75/Nonlinear-analysis-of-braced-frame-with-hinge-by-hinge-method-in-c-programming-7-2048.jpg)