A hardwired control unit generates control signals using finite state machines and a physically connected logic circuit. It consists of flip-flops, gates, and decoders. Control signals are produced sequentially as the unit transitions between states in response to instruction codes, timing signals, and external inputs. While it generates signals quickly, hardwired control units are difficult to modify or upgrade compared to microprogrammed units.
Introduction to Hardwired Control Unit and its construction using finite state machines.
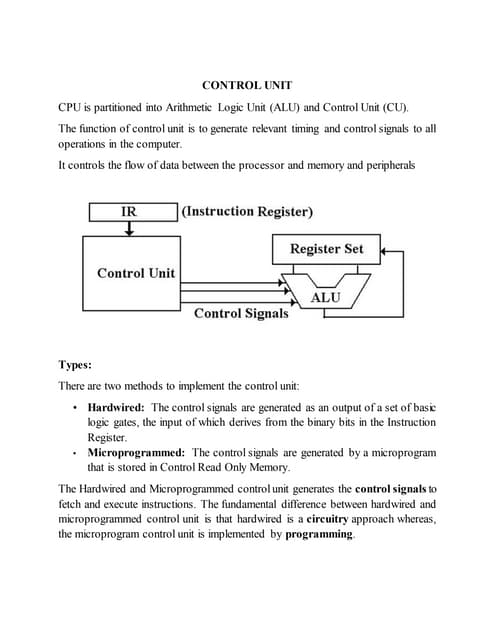
Defining the hardwired control unit, its components, and characteristics including decoders and instruction register.
Defining the hardwired control unit, its components, and characteristics including decoders and instruction register.
Various methods proposed for designing hardwired control logic including sequence counter, delay element, and state table methods.
Details on how the hardwired control unit works, focusing on signal generation and instruction processing. The role of the control signal generator and how states transition during instruction execution.
Advantages of speed and efficiency contrasted with complexities in design and modification.
► A hardwiredcontrol is a method of generating control signals with
the help of Finite State Machines (FSM).
► It’s made in the form of a sequential logic circuit by physically
connecting components such as flip-flops, gates, and drums that
result in the finished circuit. As a result, it’s known as a hardwired
controller.
3.
► What isa Hardwired Control Unit?
► Characteristics of Hardwired Control Unit
► Designing of Hardwired Control Unit
► Working of a Hardwired Control Unit
► Generation of a Signal
► Result
► Pros of Hardwired Control Unit
► Cons of Hardwired Control Unit
4.
What is aHardwired Control Unit?
► A hardwired control is a method of generating control signals with the help
of Finite State Machines (FSM).
► The control signals that are necessary for instruction execution control in the
Hardwired Control Unit are generated by specially built hardware logical
circuits, and we can’t change the signal production mechanism without
physically changing the circuit structure.
6.
Characteristics of HardwiredControl Unit
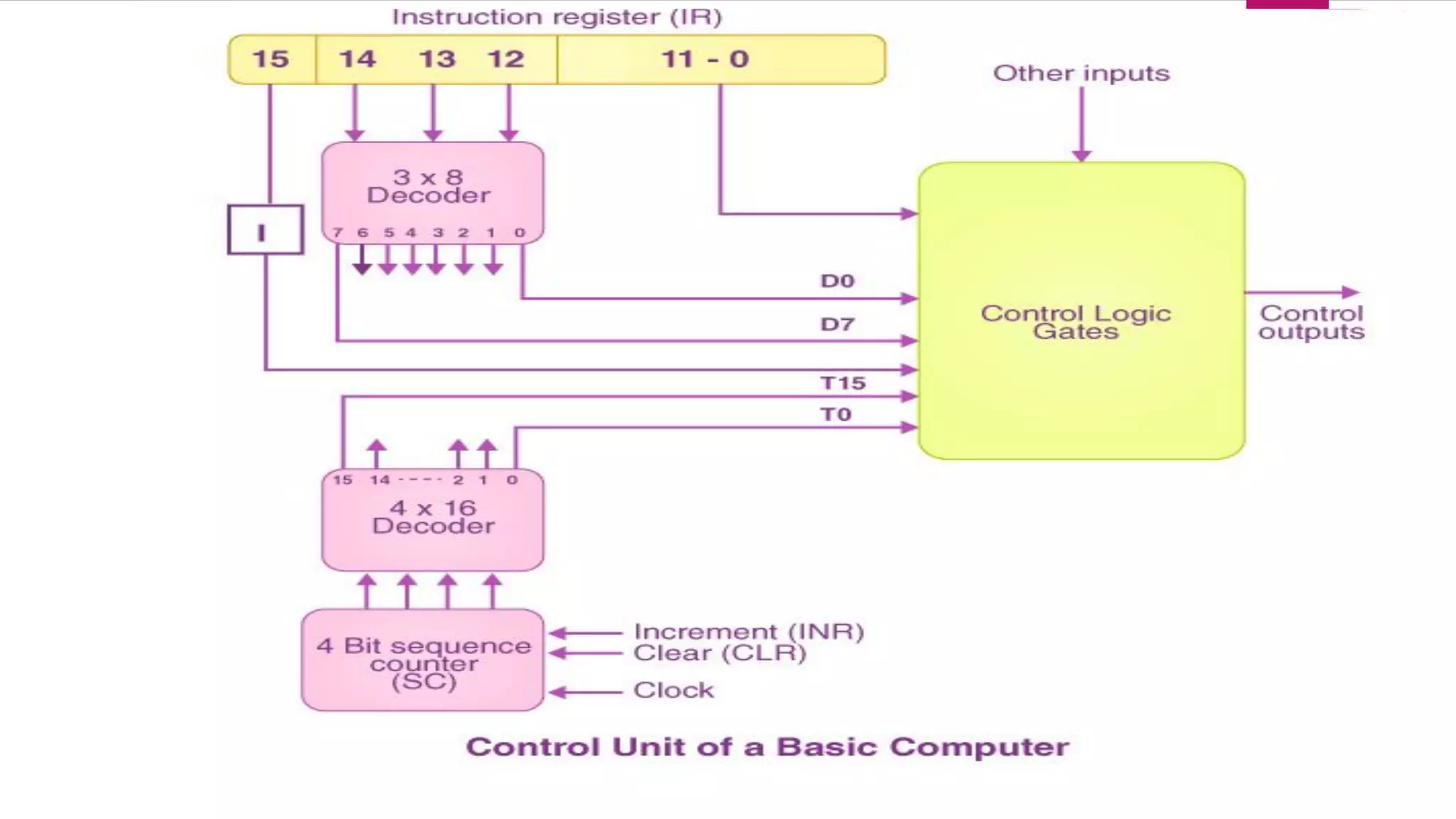
► Two decoders, sequence counter and logic gates make up a Hardwired Control.
► The instruction register stores an instruction retrieved from the memory unit (IR).
► An instruction register consists of the operation code, the I bit, and bits 0 through 11.
► A 3 x 8 decoder is used to encode the operation code in bits 12 through 14.
► The decoder’s outputs are denoted by the letters D0 through D7.
► The bit 15 operation code is transferred to a flip-flop with the symbol I.
► The control logic gates are programmed with operation codes from bits 0 to 11.
► The sequence counter (or SC) can count from 0 to 15 in binary.
7.
Designing of HardwiredControl Unit
► The following are some of the ways for constructing hardwired control logic that have been proposed:
► Sequence Counter Method − It is the most practical way to design a somewhat complex controller.
► Delay Element Method – For creating the sequence of control signals, this method relies on the usage of
timed delay elements.
► State Table Method − The standard algorithmic approach to designing the Notes controller utilizing the
classical state table method is used in this method.
8.
Working of aHardwired Control Unit
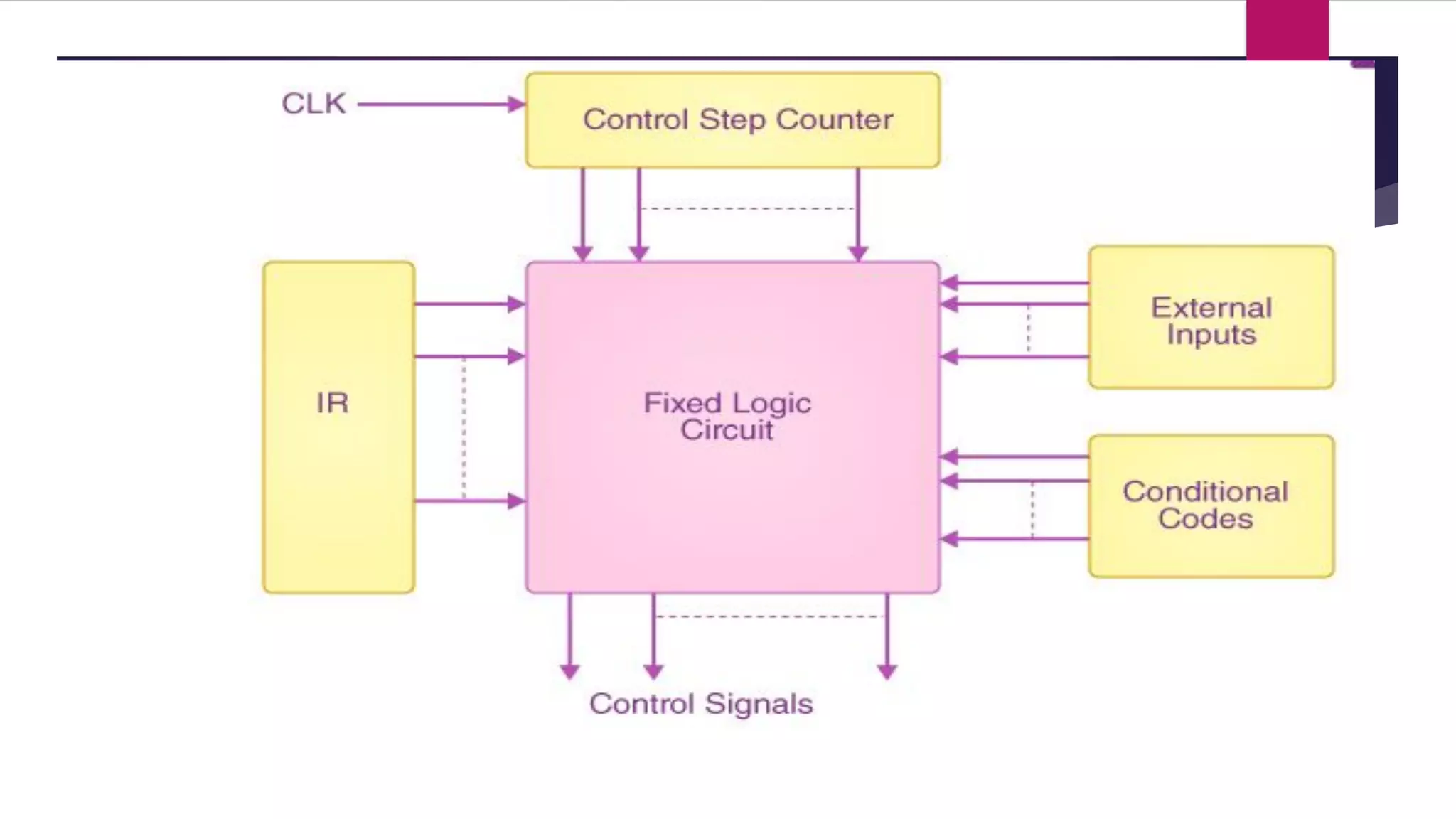
► The basic data for control signal creation is contained in the operation code of an
instruction. The operation code is decoded in the instruction decoder. The instruction
decoder is a collection of decoders that decode various fields of the instruction opcode.
► As a result, only a few of the instruction decoder’s output lines have active signal
values.
9.
Contd..
► These outputlines are coupled to the matrix’s inputs, which provide control signals for the
computer’s executive units.
► This matrix combines the decoded signals from the instruction opcode with the outputs from
that matrix which generates signals indicating consecutive control unit states, as well as
signals from the outside world, such as interrupt signals.
► The matrices are constructed in the same way that programmable logic arrays are.
11.
Generation of aSignal
► Control signals for instruction execution must be generated during the whole time range that corresponds to
the cycle of instruction execution, not just at a single moment in time.
► The control unit organises the appropriate sequence of internal states based on the structure of this cycle.
► The control signal generator matrix sends a number of signals back to the inputs of the following control
state generator matrix.
► This matrix mixes these signals with the timing signals created by the timing unit depending on the
rectangular patterns typically provided by the quartz generator.
12.
► The controlunit is in the beginning state of new instruction, fetching whenever a new instruction arrives at
it. Instruction decoding permits the control unit to enter the first state relevant to the new instruction
execution, which lasts as long as the computer’s timing signals as well as other input signals, such as flags
and state information, stay unchanged.
► A change in any of the previously stated signals causes the control unit’s status to change.
13.
Result
► A newcorresponding input for the control signal generator matrix is formed as a result
of this. When an external signal (such as an interrupt) comes, the control unit enters
the next control state, which is concerned with the response to the external signal (for
example, interrupt processing). The computer’s flags and state variables are utilized to
choose appropriate states for the cycle of instruction execution.
14.
► The cycle’slast states are control states that begin fetching the program’s next
instruction: sending the program’s counter content to the address of the main memory
buffer register and then reading the instruction word into the computer’s instruction
register. The control unit enters an OS state, where it waits for the next user directive
when the running instruction is the stop instruction, which terminates program execution.
16.
Pros of HardwiredControl Unit
► Hardwired Control Unit is quick due to the usage of combinational circuits to
generate signals.
► The amount of delay that can occur in the creation of control signals is dependent on
the number of gates.
► It can be tweaked to get the fastest mode of operation.
► Quicker than a micro-programmed control unit.
17.
Cons of HardwiredControl Unit
► As we require additional control signals to be created, the design becomes
more complex (need for more encoders or decoders).
► Changes to control signals are challenging since they necessitate
rearranging wires in the hardware circuit.
► It’s difficult and time-consuming to add a new feature.
► It’s difficult to evaluate and fix flaws in the initial design.
► It’s a bit pricey.










































![2.4_Design_of_CPU_&_Types_of_Control_Unit[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/2-250318152042-1bd3979e-thumbnail.jpg?width=640&height=640&fit=bounds)



































