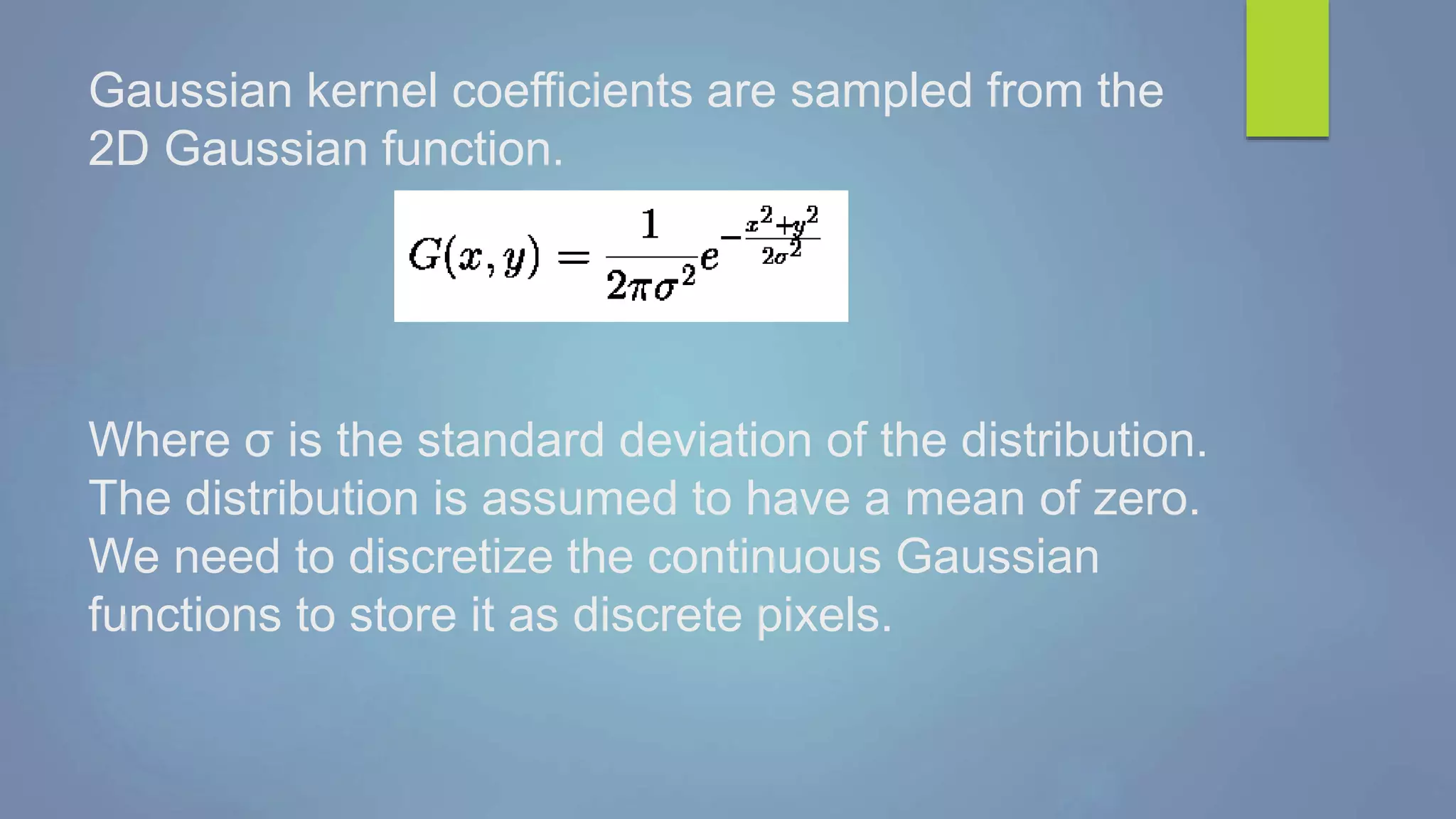
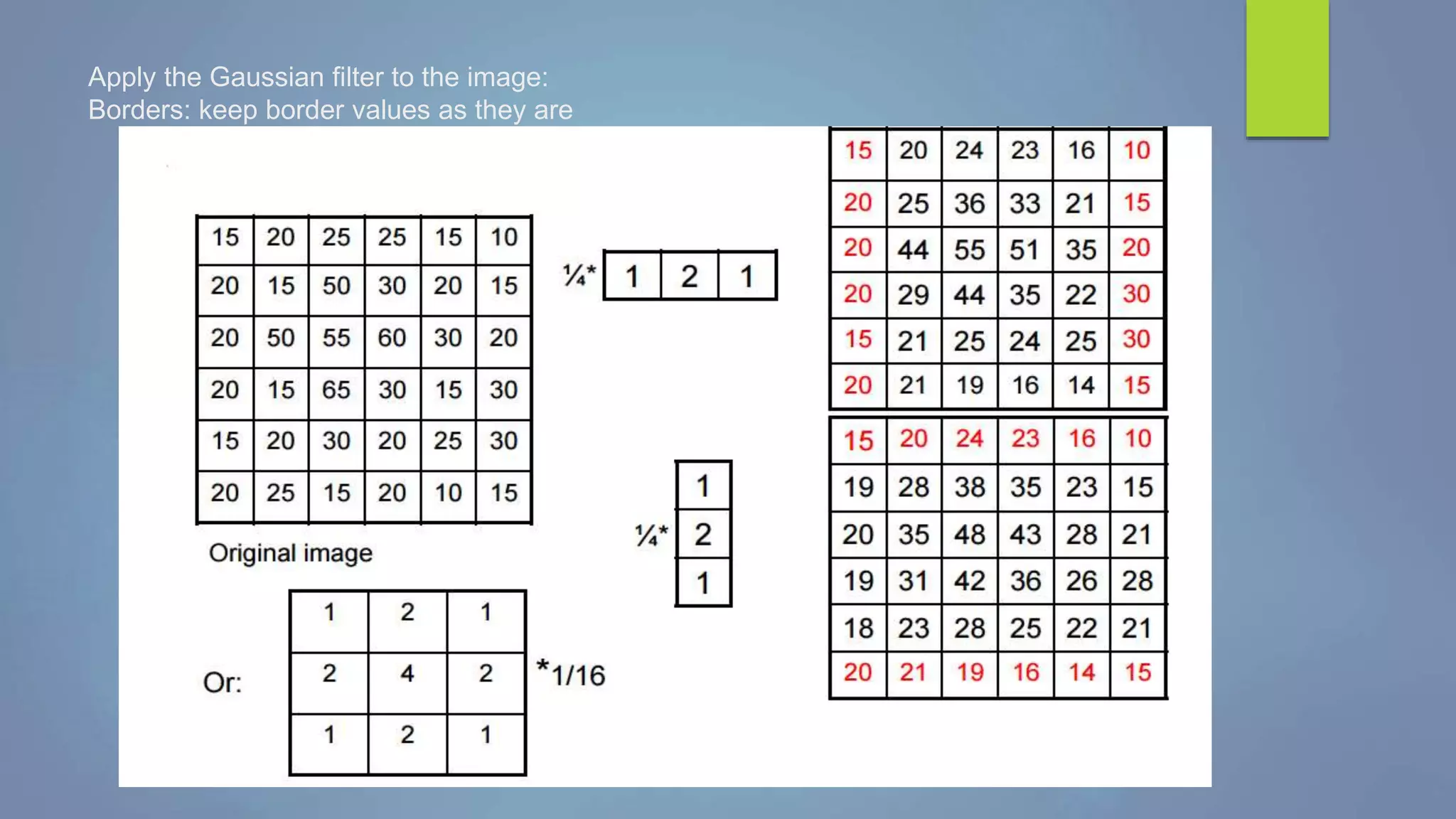
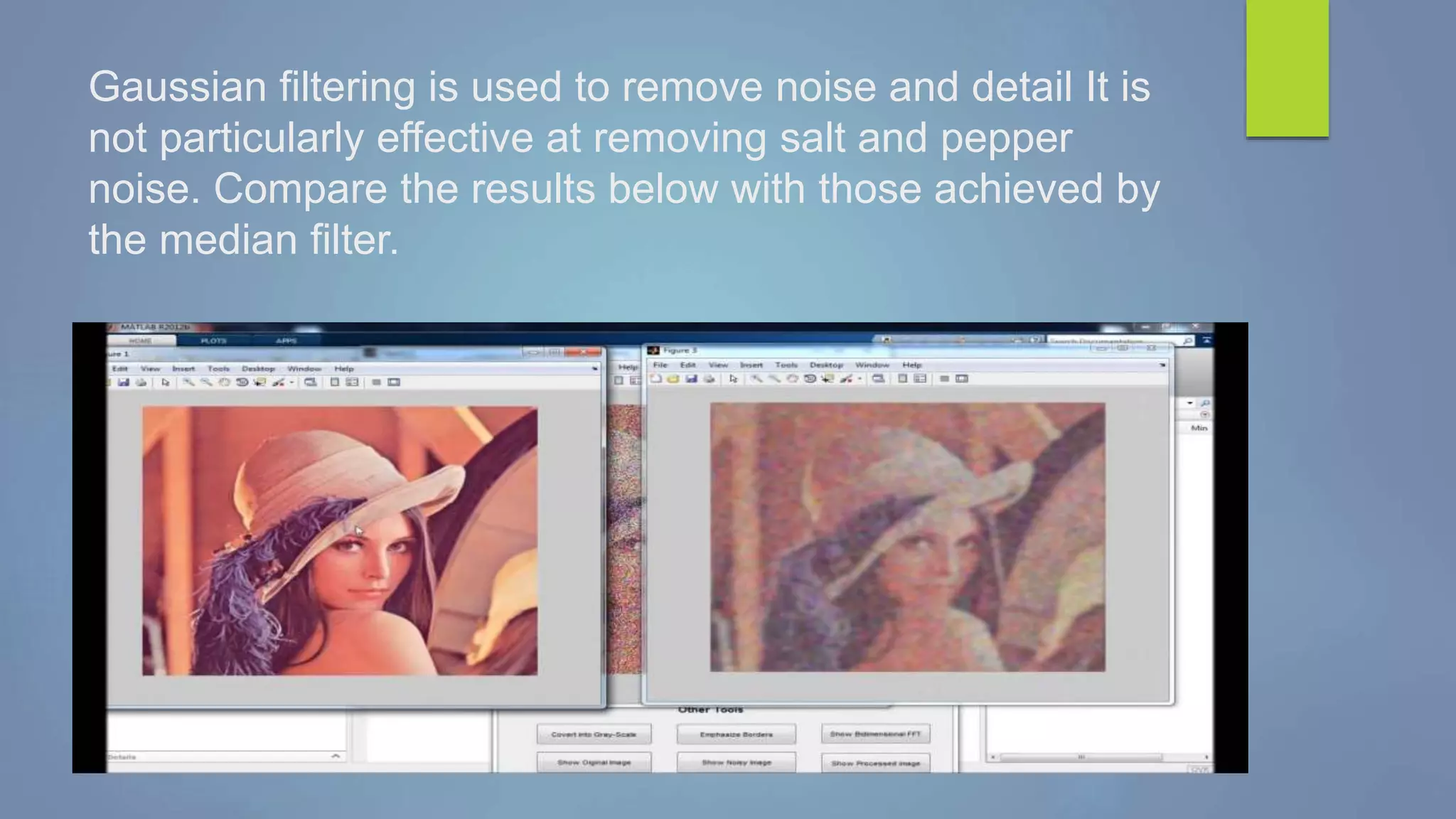
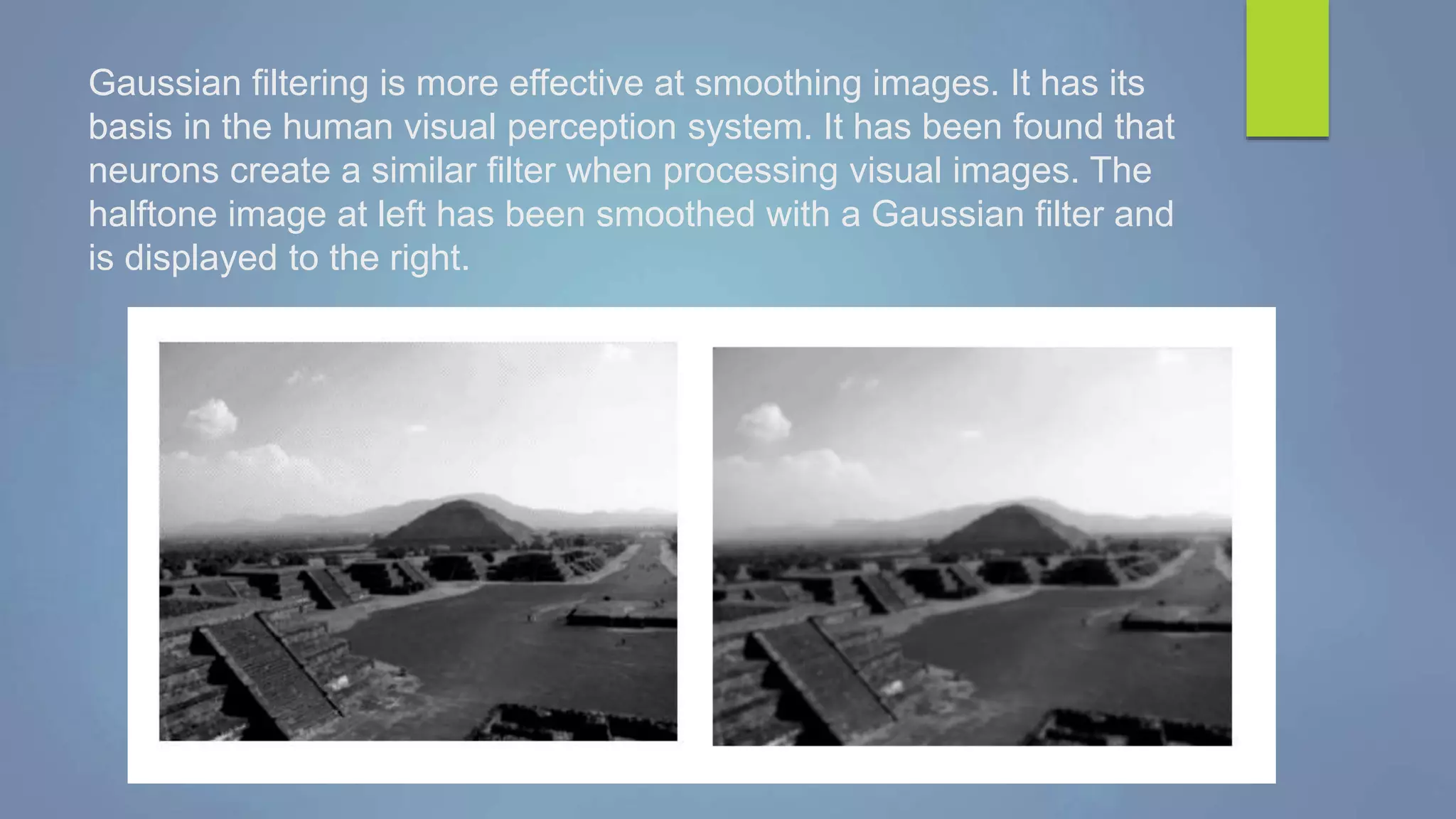
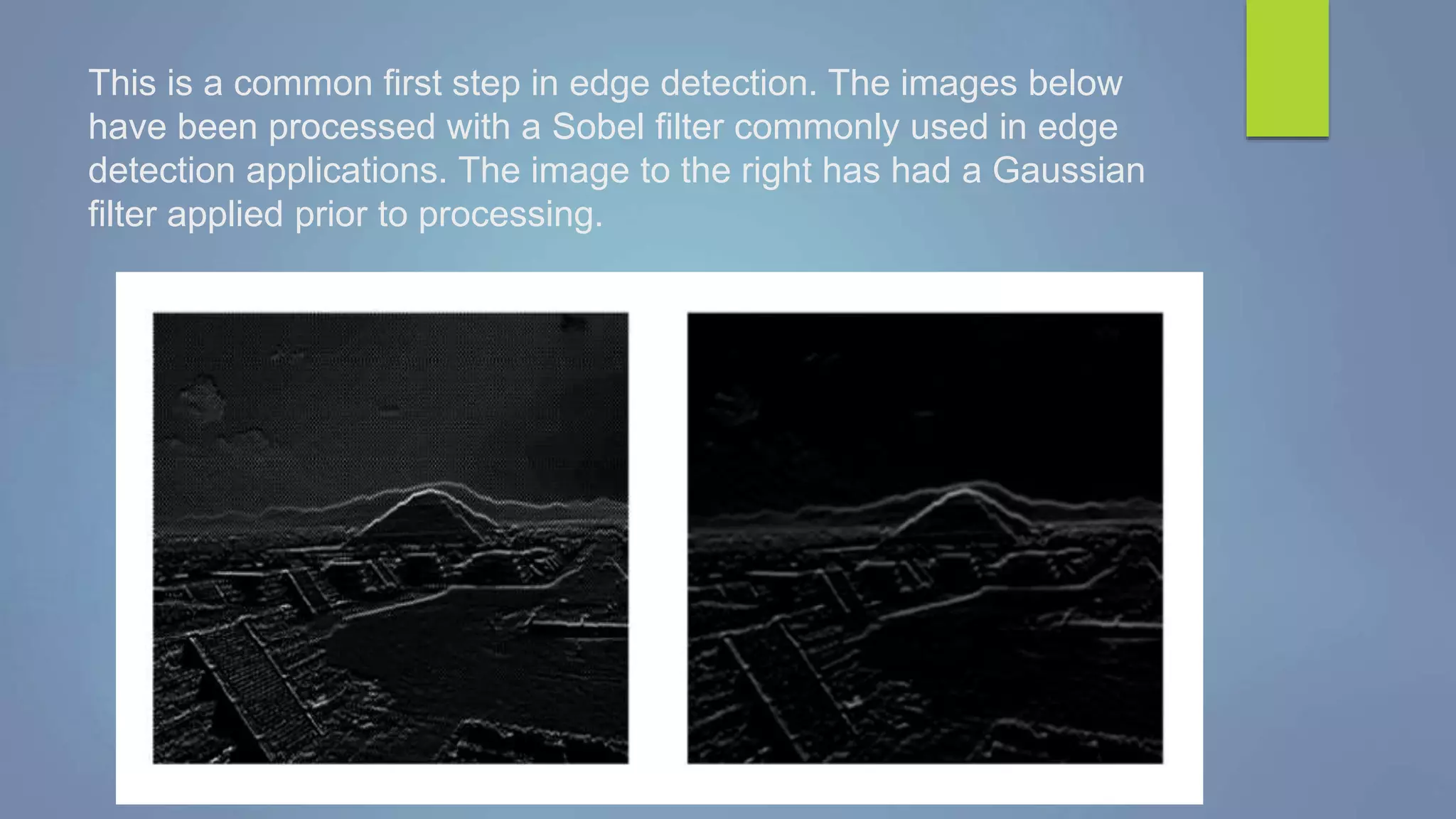
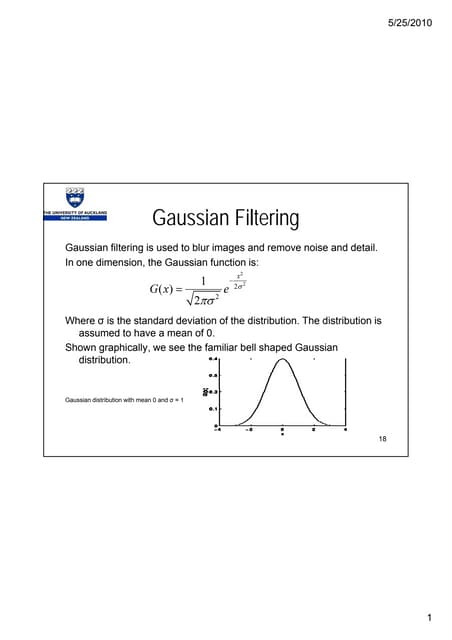
Gaussian filtering is used to blur images and remove noise and detail. It works by convolving the image with a Gaussian point spread function. The standard deviation of the Gaussian function determines the amount of blurring, with larger standard deviations producing more blur. A discrete Gaussian kernel is used to approximate the continuous Gaussian function for computational purposes. Common applications of Gaussian filtering include smoothing images and reducing noise as a pre-processing step for tasks like edge detection.