Advanced Software Techniques for Efficient Development 1
1.
is imiza
ion?
• Optimizationis the act of
obtaining
circumstances.
the best result under
given
• The objective of doing optimizationis either to minimizethe
effort required or to maximize the desired benefit.
• The efiort required or the benefit desired in any practical
situation
can be expressed as a function of certain decision variables.
Optimization is definedas the processof findingthe conditions
that
give the maximum or minimum value of a function.
2.
me ie eraions ec ive unc
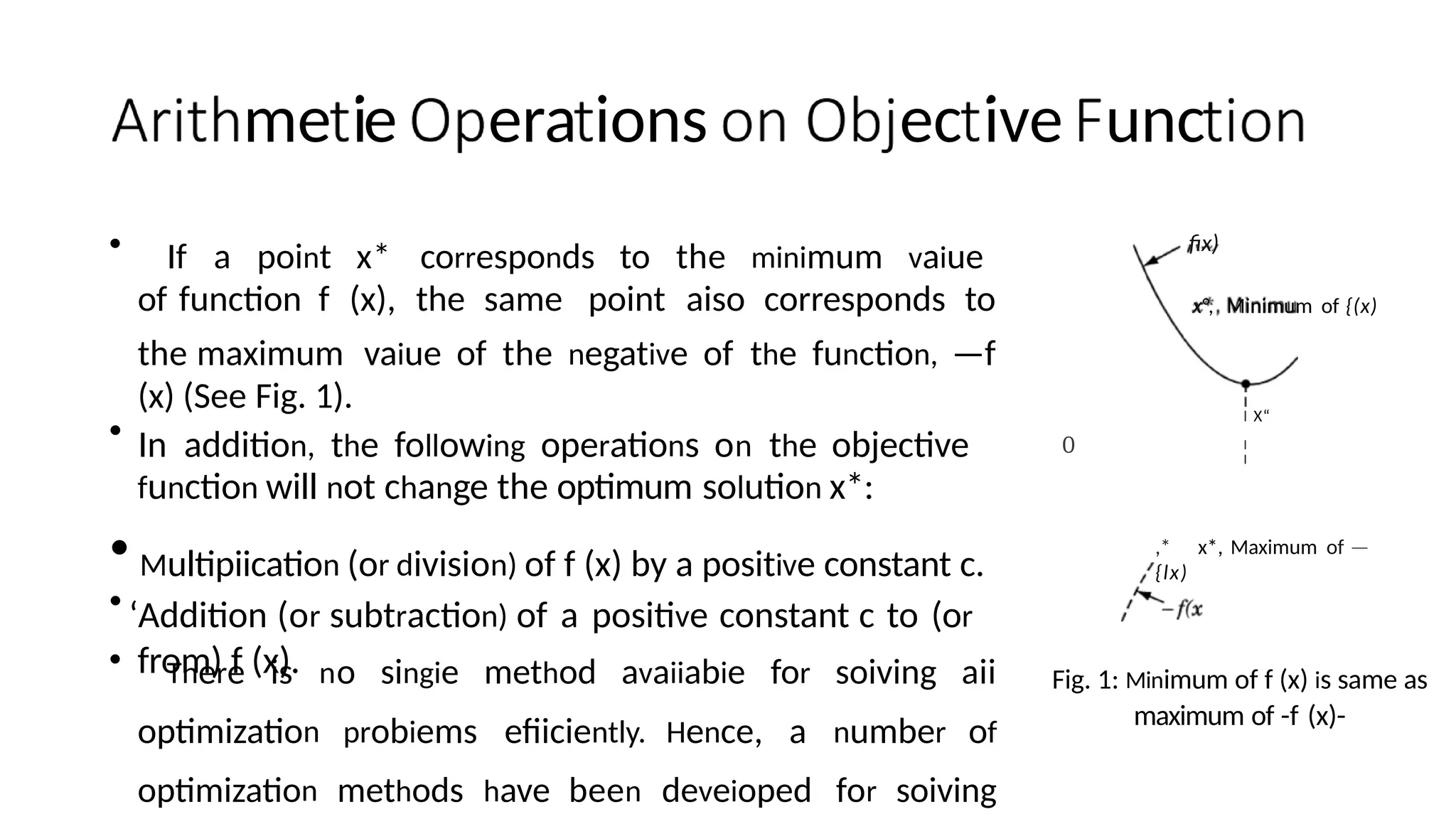
• If a point x* corresponds to the minimum vaiue
of function f (x), the same point aiso corresponds to
the maximum vaiue of the negative of the function, —f
(x) (See Fig. 1).
• In addition, the following operations on the objective
function will not change the optimum solution x*:
• Multipiication (or division) of f (x) by a positive constant c.
• ‘Addition (or subtraction) of a positive constant c to (or
from) f (x).
• There is no singie method avaiiabie for soiving aii
optimization probiems efiiciently. Hence, a number of
optimization methods have been deveioped for soiving
0
fix)
x°, Minimum of {(x)
I X“
I
I
,* x*, Maximum of —
{lx)
Fig. 1: Minimum of f (x) is same as
maximum of -f (x)-
3.
ema ica ramminec
ues
• The optimum seeking methods are also known as mathematical
programmingtechniques.
• Mathematical programming techniques are useful in finding the
minimum of a function of several variables under a prescribed set
of constraints.
• Statistical methods enable one to analyze the experimental data and
build empirical models to obtain the most accurate representation
of the physical situation.
4.
0
#
,
N
N
,
s
0
.
0
1
i
i
ra
i
l i ne a r prngrwrnmin
Integer proparnmnxng
I'*fetwork
Ga«ric theory
enetic
irrtulated
arineuliog
Particle swarm
Neural
methods
Reliatsility tDenry
a
I
BrCstical rnethc*ds
Cluster alysis, pattern
Oiscriminate analysis
owl
yois)
5.
ica ions
imiza
•*Optimum designof eiectricai networks
• *Optimai production pianning, controiiing, and scheduiing
• Pianning of maintenance and repiacement of equipment to
reduce
operatingcosts
•Aiiocation of resources or services among severai activities
to
maximize the benefit
°'*Pianning the best strategy to obtain maximum profit in the
presence
6.
emen
imiza
e
m
• An optimizationor a mathematical
programming
follows.
problem can be stated as
where X is an n-dimensional vector called
the design vector, f(X) is termed the
objective function, and g;(/) and f;(J¢)
Find X
subject ii) the st›nsir:iiiiis
- "/f
w hi< h HU131 UJ
U
c
h
(
)
1 j í X 1 Ú. / l . ž . . . . /r (1)
• The problem stated in Eq. (1) is called a constrained optimization problem.
• Some optimization problems do not involve any constraints and they are
called
unconstrained optimization problems.
are known as inequality and equality
constraints, respectively. The number of
variables n and the number of inequality
and equality constraints m and p,
respectively.
7.
esi
• Any engineeringsystem or component is defined by a set of quantities some
of which are viewed as variables during the design process.
• In general, certain quantities are usually fixed at the outset and these are
called preassigned parameters. All the other quantities are treated as variables
in the design process and are called design or decision variables x;, i 1,
2,...,n.
• The design variables are collectively represented as a design vector X
(• •› •
••• •z)T
•
• If an n-dimensional Cartesian space with each coordinate axis representing
a design variable x/, i 1, 2,...,n is considered, the space is called the
design variable space or simply design space.
• Each point in the n-dimensional design space is called a design point
8.
esi
rain
• In manypractical problems, the design variables cannot be chosen
arbitrarily;
rather, they have to satisfy certain specified functional and other requirements.
• The restrictions that must be satisfied to produce an acceptable design are
collectively called design constraints.
• Constraints that represent limitations on the behavior or performance of the
system are termed behavior or functional constraints.
• Constraints that represent physical limitations on design variables, such as
availability, fabricability, and transportability, are known as geometric or
side constraint.
9.
ons
ace
• For illustration,consider an optimization problem with only inequality
constraints gj(X) 6 0. The set of values of X that satisfy the equation gj(A*) =
0 forms a hypersurface in the design space and is called a constraint surface.
• The constraint surface divides the design space into two regions: one in which
gj(/¢) < 0 and the other in which gy(7) » 0.
• Thus, the points lying on the hypersurface will satisfy the constraint
critically, whereas the points lying in the region where gj(A*) > 0 are infeasible
or unacceptable, and the points lying in the region where gj(A')
< 0 are feasible or acceptable.
• The collection of all the constraint surfaces gy(A*) = 0 , j = 1, 2, ... , m,
which
separates the acceptable region is called the composite constraint surface.
10.
ons
ace
• Figure showsa hypothetical two-dimensional design space where the infeasible
region is indicated by hatched lines. A design point that lies on one or more
than one constraint surface is called a bound point, and the associated
constraint is called an active constraint.
• Design points that do not lie on any constraint surface are known as free
points. Depending on whether a particular design point belongs to the
acceptable or unacceptable region, it can be identified as one of the following
four types:
1. Free and acceptable point
2. Free and unacceptable point
3. Bound and acceptable point
4. Bound and unacceptable point
11.
ons
Infeasible region
Behavior
c‹:nstraint
= 0
xFree
unacceptable
point
ace
Feasib1y region
Bf?hźtviuf c0!"Istrai Flt E
—
— 0
Side constraint ć3
= o
e Free point
Bound acceptable
poin
Behavior
Eonstraint
S ide constraint,g = g
Bound unacceptable polnt
Fig-Constraintsurfacesin a hypotheticaitwo-dimensionaidesign
12.
ec ive
unc
• Theconventional design procedures aim at finding an acceptable or
adequate design that merely satisfies the functional and other
requirements of the problem.
• In general, there will be more than one acceptable design, and the purpose
of optimization is to choose the best one of the many acceptable designs
available.
• Thus, a criterion has to be chosen for comparing the different alternative
acceptable designs and for selecting the best one. The criterion with respect
to which the design is optimized, when expressed as a function of the
design variables, is known as the criterion or merit or objective function.
• The choice of objective function is governed by the nature of problem.
• In electrical engineering designs, the objective is usually minimization of cost,
maximization of profit, etc.
13.
ec ive
unc
• Thus,the choice of the objective function appears to be straightforward in
most design problems. However, there may be cases where the optimization
with respect to a particular criterion may lead to results that may not be
satisfactory with respect to another criterion.
• For example, minimization of network power loss may not correspond to
minimum size of capacitor placement.
• Thus, the selection of the objective function can be one of the most
important
decisions in the whole optimum design process.
• In some situations, there may be more than one criterion to be satisfied
simultaneously.
• An optimization problem involving multiple objective functions is known as
a
14.
ec ive
• Withmuitiple objectives there arises a possibiiity of confiict, and one simpie way
to handle the probiem is to construct an overaii objective function as a iinear
combination of the confiicting muitipie objective functions.
• Thus, i* lb(*) and /2(*) denote two objective functions, construct a
new
(overaii)objective functionfor optimizationas
+ 2 * 2 ( )
whP.rIŽ o1 člnd o2 žŽre conStan/is, whose vžŽiUes indiCate thIŽ rP.IativP. importčlnCe of
one objective function reiativeto the other.
15.
ec ive
unc
ace
s
• Thelocus of all points satisfying f (X) C constant forms a hypersurface
in the design space, and each value of C corresponds to a different member
of a family of surfaces. These surfaces, called objective function surfaces, are
shown in a hypothetical two-dimensional design space in Fig.
• Once the objective function surfaces are drawn along with the constraint
surfaces, the optimum point can be determined withoutmuch difficulty.
• But the main problem is that as the number of design variables exceeds two
or three, the constraint and objective function surfaces become complex even
for visualization and the problem has to be solved purely as a mathematical
problem.