This presentation provides an in-depth overview of Computer Vision — a field of Artificial Intelligence that enables machines to interpret and understand visual information from the world. It begins by explaining the fundamental concepts of image processing, including image representation, filtering, and feature extraction.
The presentation then transitions into Convolutional Neural Networks (CNNs), the backbone of modern computer vision systems. It explains the architecture of CNNs, covering layers such as convolution, pooling, activation, and fully connected layers, and how they work together to extract hierarchical visual features.
Real-world applications are highlighted — including object detection, facial recognition, autonomous vehicles, and medical image analysis — to demonstrate how CNNs revolutionize visual data understanding. The presentation also touches on recent advancements such as transfer learning, pre-trained models (like VGG, ResNet), and frameworks used for implementation (TensorFlow, PyTorch).
By the end, the audience will have a clear understanding of how CNNs mimic human visual perception to perform complex image recognition tasks with high accuracy.
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Supervised
Learning
Unsupervised
Learning
Semi-Supervised
Learning
Reinforcement
Learning
Standard supervised learning pipeline:
Computer Vision is Machine Learning
References: [81]
Computer Vision](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-9-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Images are Numbers
References: [89]
• Regression: The output variable takes continuous values
• Classification: The output variable takes class labels
• Underneath it may still produce continuous values such as
probability of belonging to a particular class.](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-10-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Computer Vision is Hard
References: [66, 69, 89]](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-11-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Image Classification Pipeline
References: [81, 89]](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-12-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Famous Computer Vision Datasets
References: [90, 91, 92, 93]
MNIST: handwritten digits ImageNet: WordNet hierarchy
CIFAR-10(0): tiny images Places: natural scenes](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-13-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Let’s Build an Image Classifier for CIFAR-10
References: [89, 91]](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-14-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Let’s Build an Image Classifier for CIFAR-10
References: [89, 91]
Accuracy
Random: 10%
Our image-diff (with L1): 38.6%
Our image-diff (with L2): 35.4%](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-15-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
K-Nearest Neighbors: Generalizing the Image-Diff Classifier
References: [89]
Tuning (hyper)parameters:](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-16-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
K-Nearest Neighbors: Generalizing the Image-Diff Classifier
References: [89, 94]
Accuracy
Random: 10%
Training and testing on the same data: 35.4%
7-Nearest Neighbors: ~30%
Human: ~94%
…
Convolutional Neural Networks: ~95%](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-17-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Reminder: Weighing the Evidence
References: [78]
Evidence
Decisions](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-18-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Reminder: Classify and Image of a Number
References: [80]
Input:
(28x28)
Network:](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-19-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Reminder: “Learning” is Optimization of a Function
References: [63, 80]
Ground truth for “6”:
“Loss” function:](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-20-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Convolutional Neural Networks
References: [95]
Regular neural network (fully connected):
Convolutional neural network:
Each layer takes a 3d volume, produces 3d volume with some
smooth function that may or may not have parameters.](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-21-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Convolutional Neural Networks: Layers
• INPUT [32x32x3] will hold the raw pixel values of the image, in this case an image of width 32, height 32, and
with three color channels R,G,B.
• CONV layer will compute the output of neurons that are connected to local regions in the input, each computing
a dot product between their weights and a small region they are connected to in the input volume. This may
result in volume such as [32x32x12] if we decided to use 12 filters.
• RELU layer will apply an elementwise activation function, such as the max(0,x) thresholding at zero. This leaves
the size of the volume unchanged ([32x32x12]).
• POOL layer will perform a downsampling operation along the spatial dimensions (width, height), resulting in
volume such as [16x16x12].
• FC (i.e. fully-connected) layer will compute the class scores, resulting in volume of size [1x1x10], where each of
the 10 numbers correspond to a class score, such as among the 10 categories of CIFAR-10. As with ordinary
Neural Networks and as the name implies, each neuron in this layer will be connected to all the numbers in the
previous volume.
References: [95]](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-22-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Dealing with Images: Local Connectivity
Same neuron. Just more focused (narrow “receptive field”).
The parameters on a each filter are spatially “shared”
(if a feature is useful in one place, it’s useful elsewhere)
References: [95]](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-23-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
ConvNets: Spatial Arrangement of Output Volume
• Depth: number of filters
• Stride: filter step size (when we “slide” it)
• Padding: zero-pad the input
References: [95]](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-24-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
References: [95]](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-25-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
ConvNets: Pooling
References: [95]](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-26-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Computer Vision:
Object Recognition / Classification
References: [4]](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-27-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Original Ground Truth FCN-8
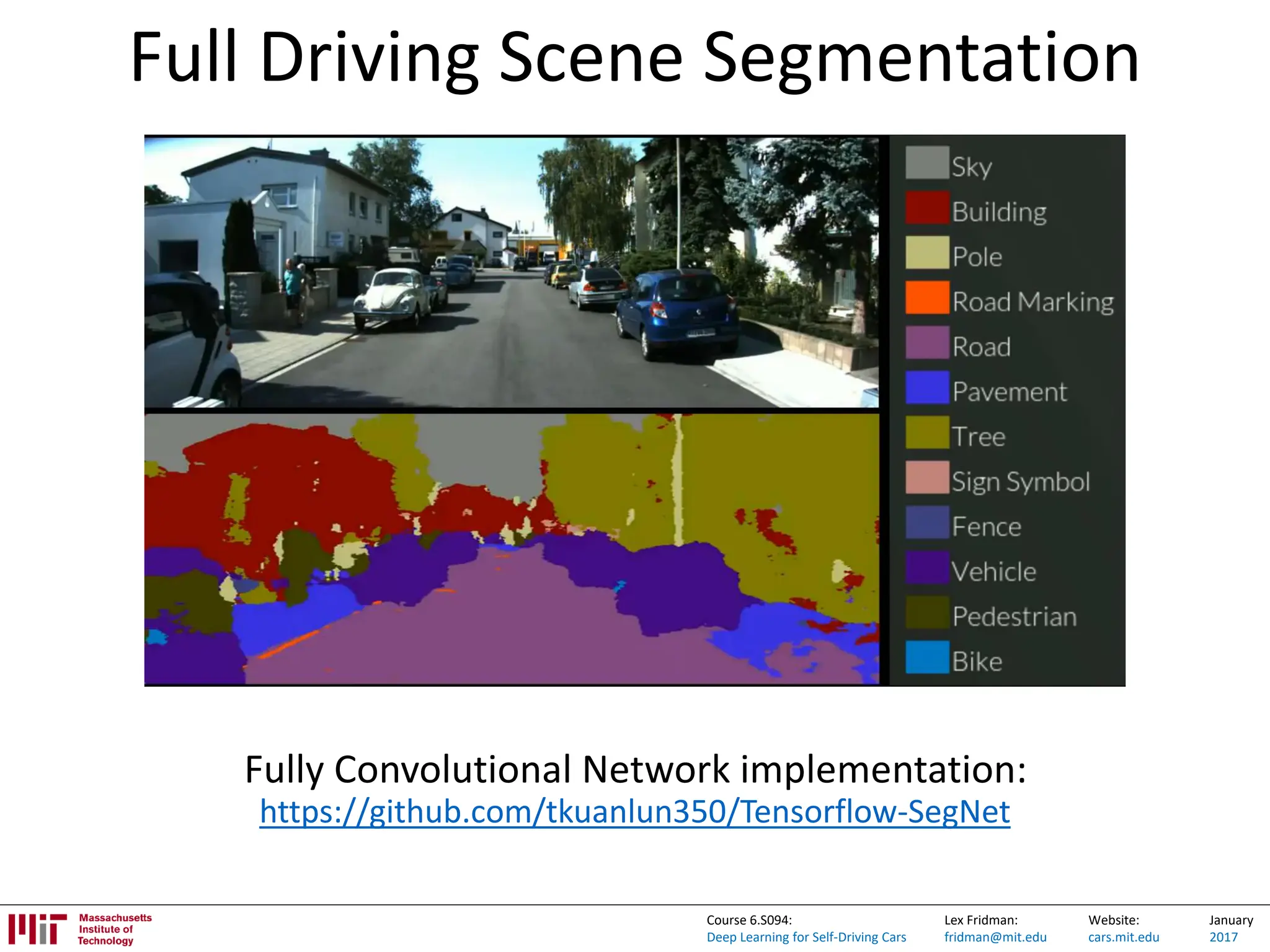
Computer Vision:
Segmentation
References: [96]](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-28-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
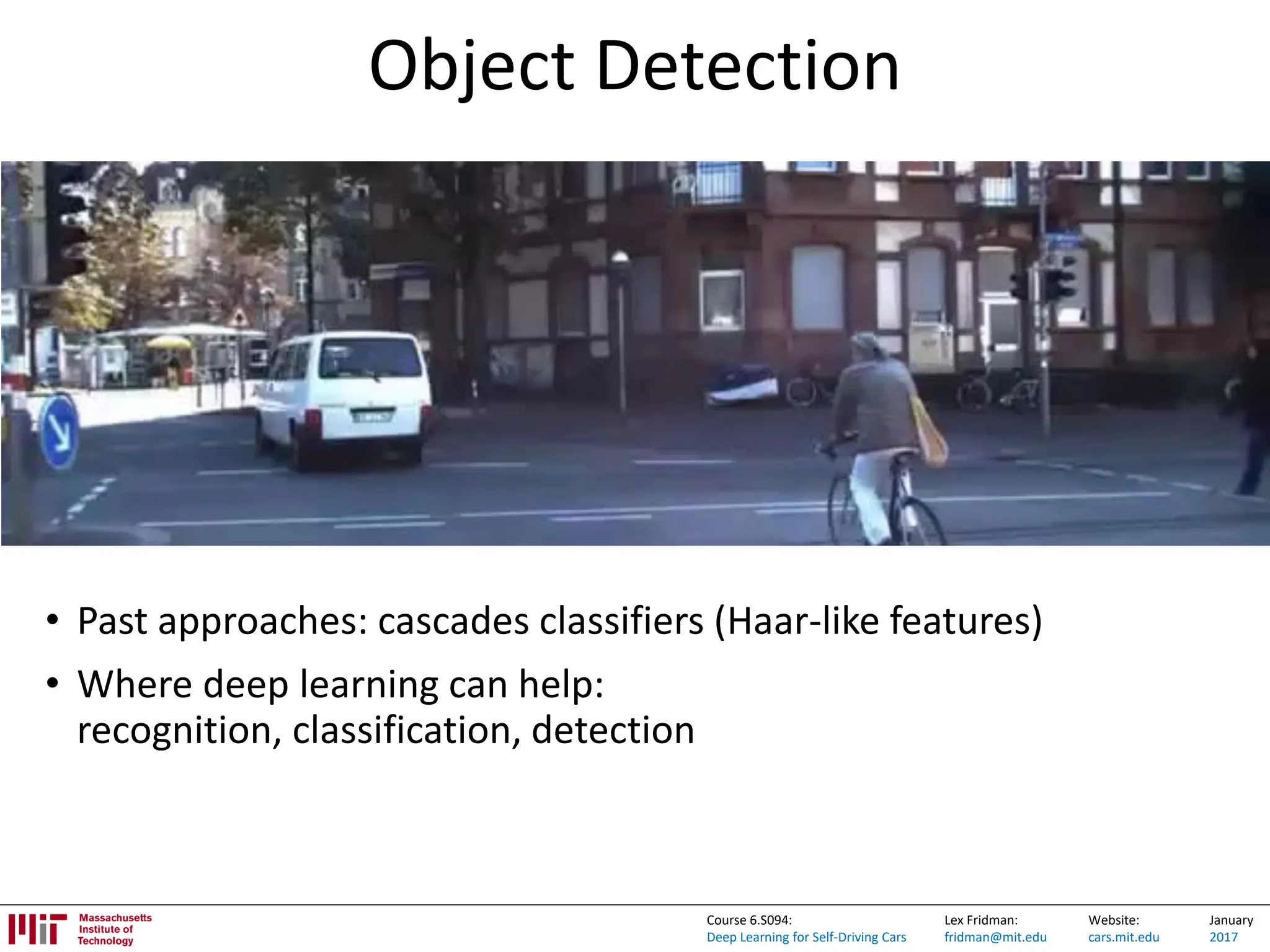
Computer Vision:
Object Detection
References: [97]](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-29-2048.jpg)

![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
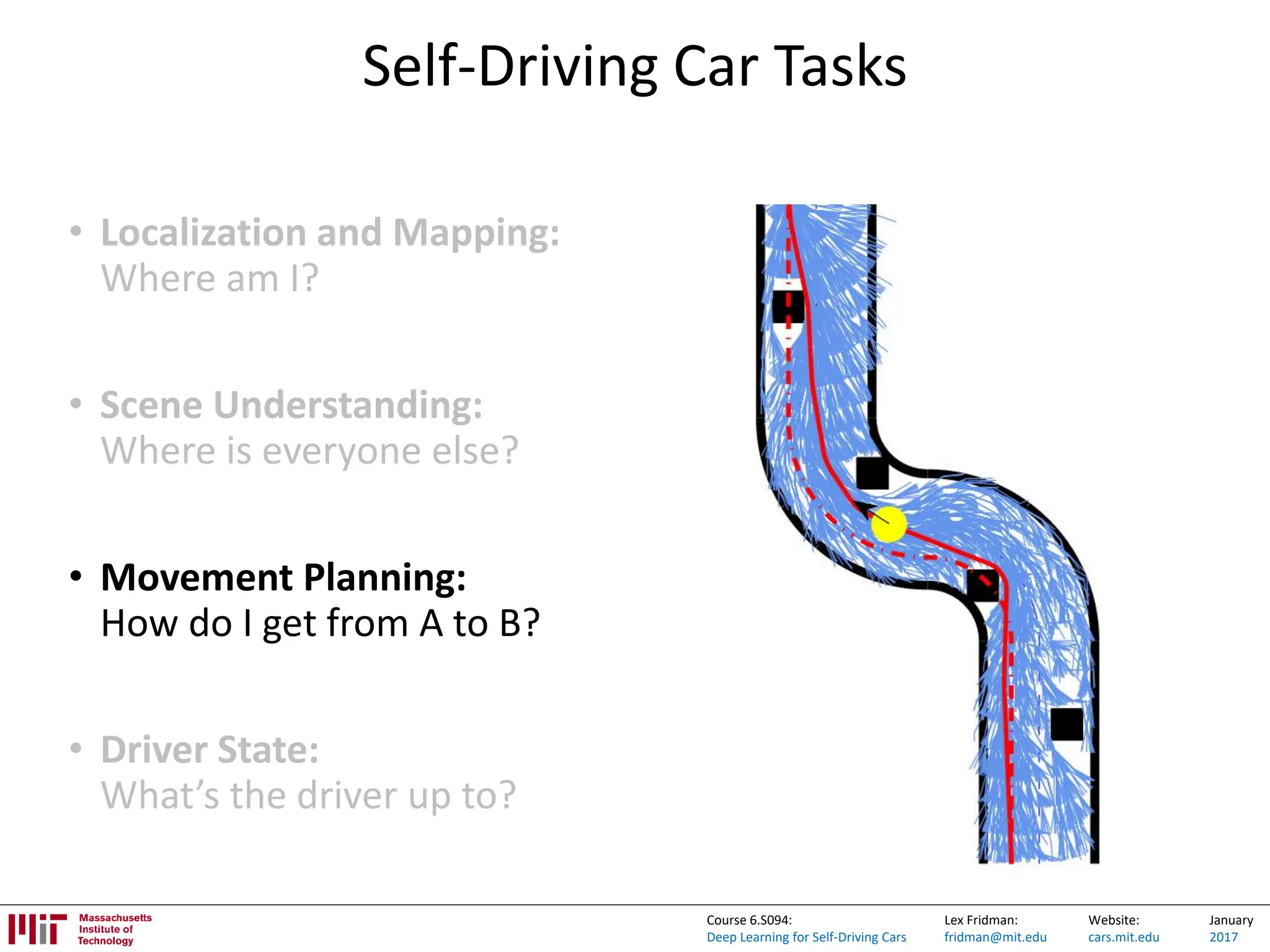
SLAM: Simultaneous Localization and Mapping
What works: SIFT and optical flow
References: [98, 99]](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-47-2048.jpg)

![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
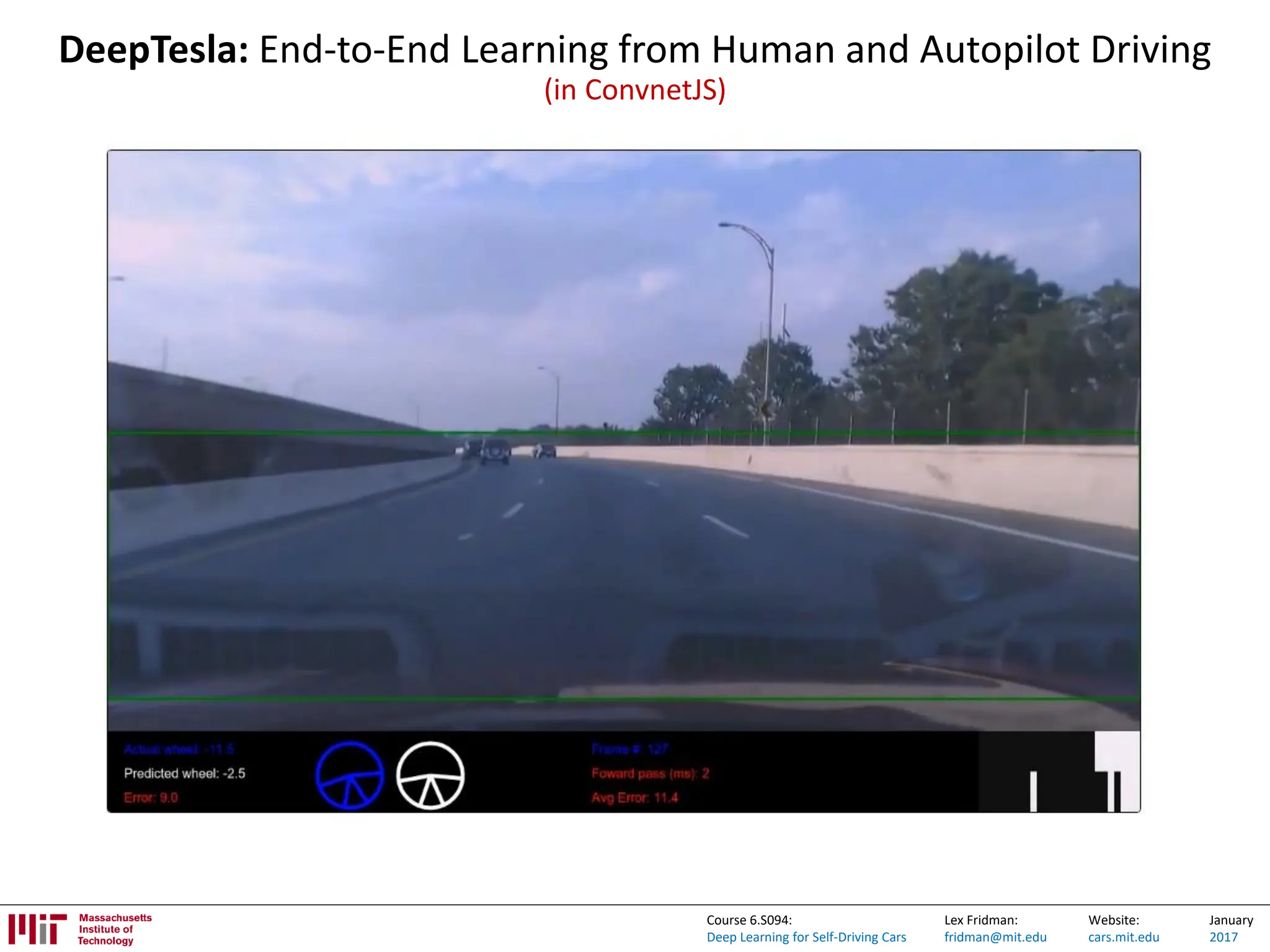
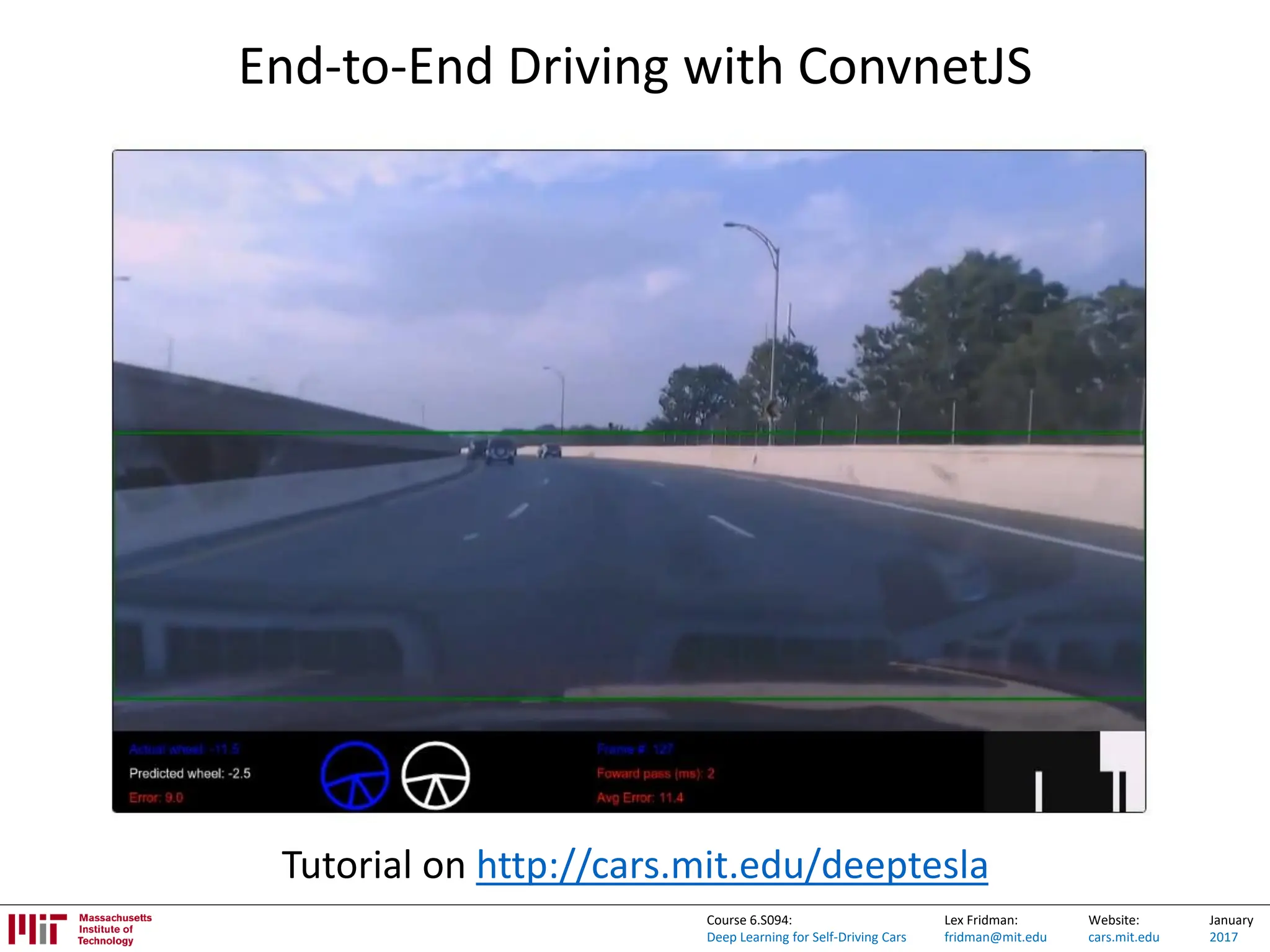
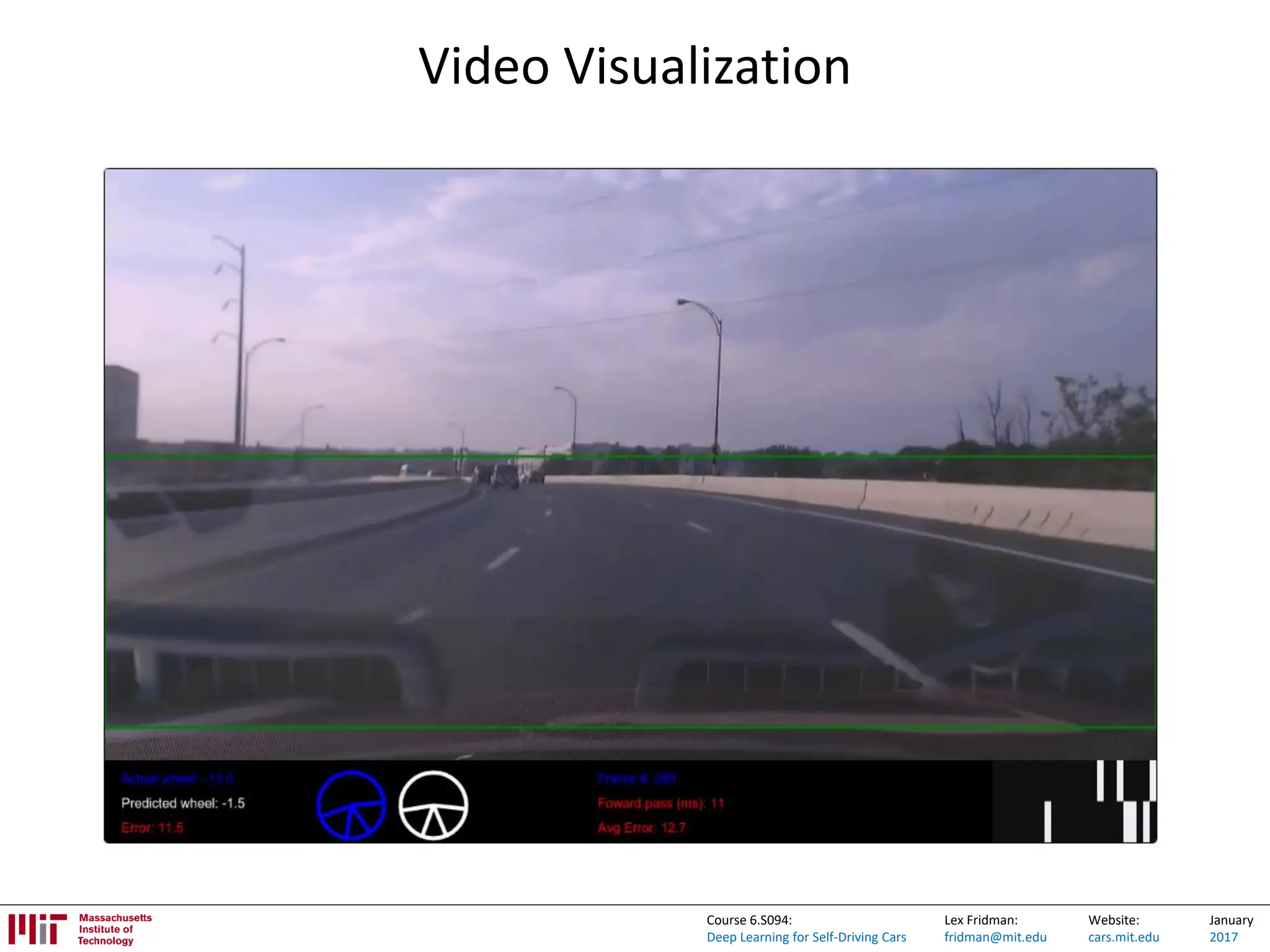
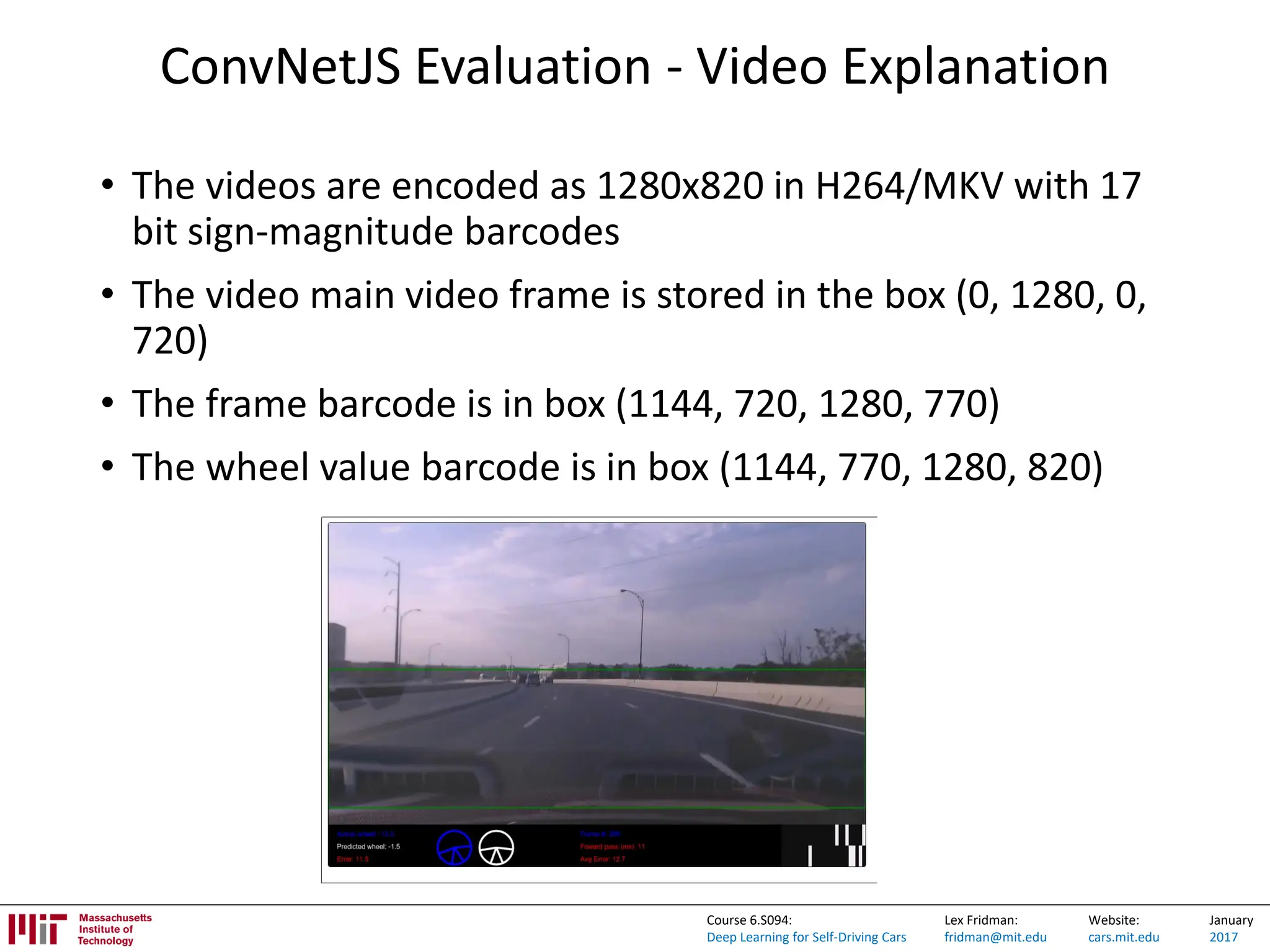
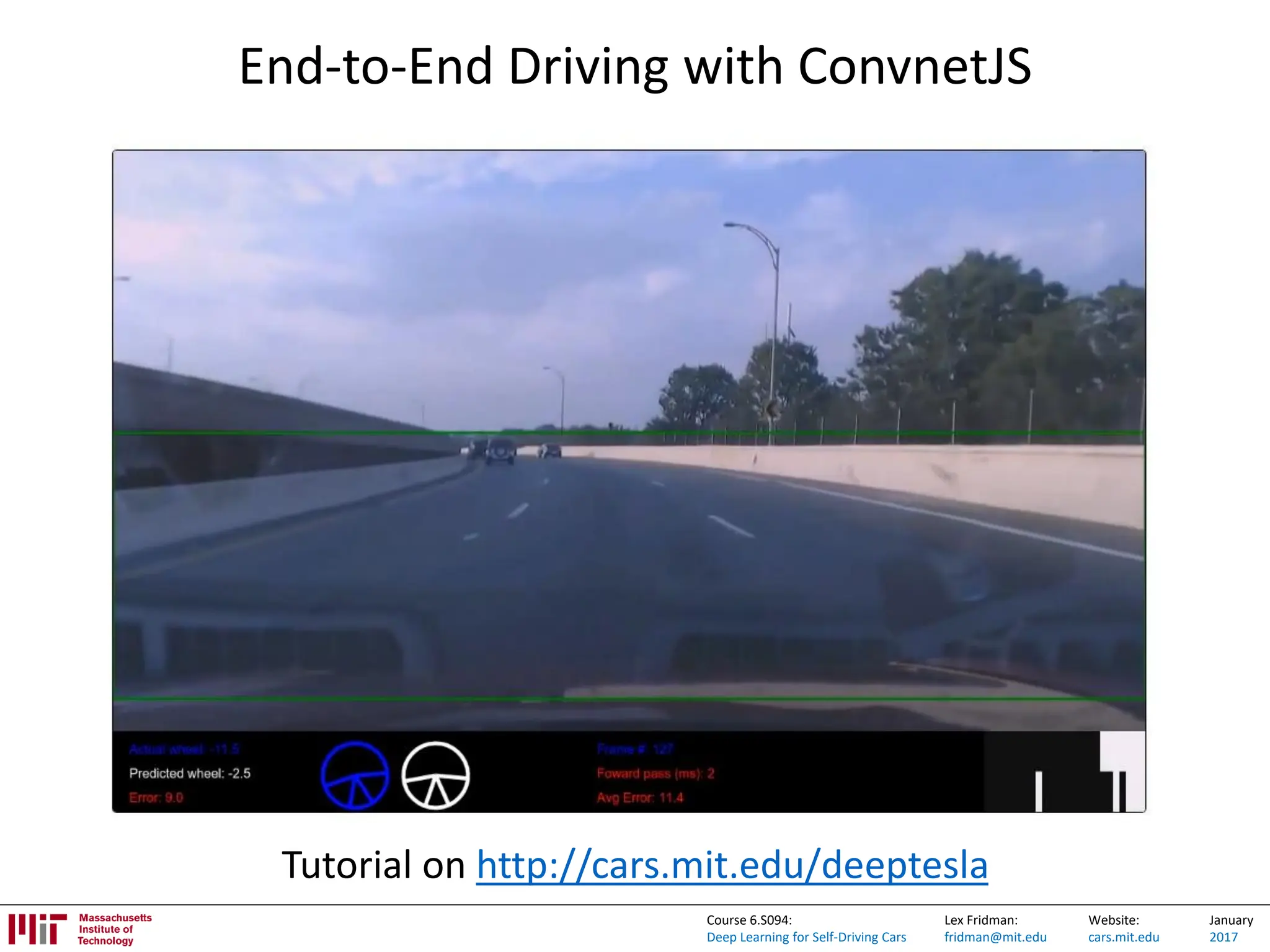
ConvNetJS Evaluation - Forward Pass
• Now we can use our extracted volume in the forward pass
by calling net.forward(our_volume)
• The predicted value is stored in the output neuron:
• var prediction = net.forward(vol);
• var raw_regression_value = prediction.w[0];
• Because we min-max normalized our inputs while training
the network, we need to transform our outputs – this is just
the reverse transformation we performed on input:
• Wheel value = (raw_regression_value * total_wheel_range) –
wheel_min
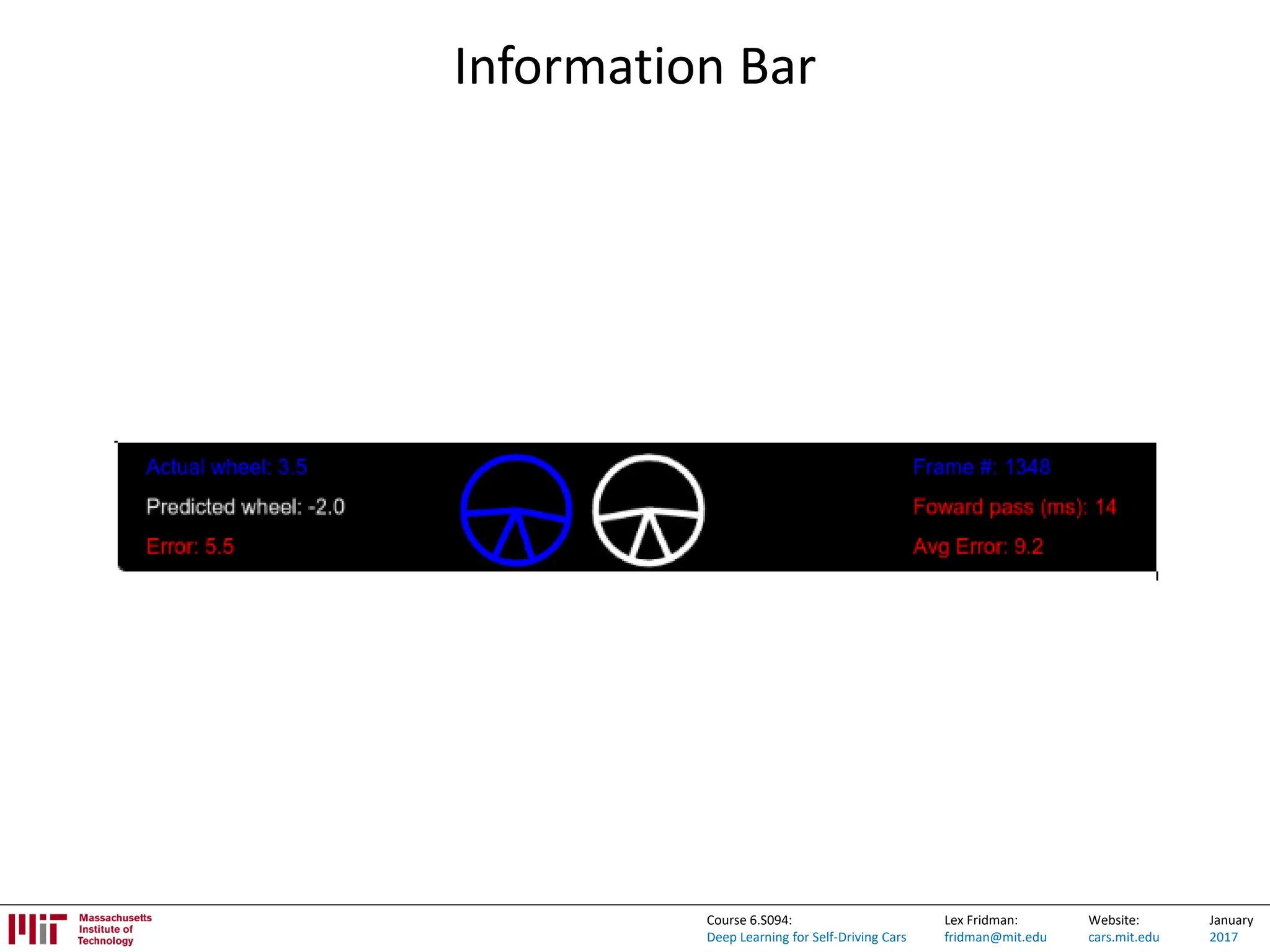
• We visualize the predicted and actual steering wheel values
and calculate the error](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-91-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
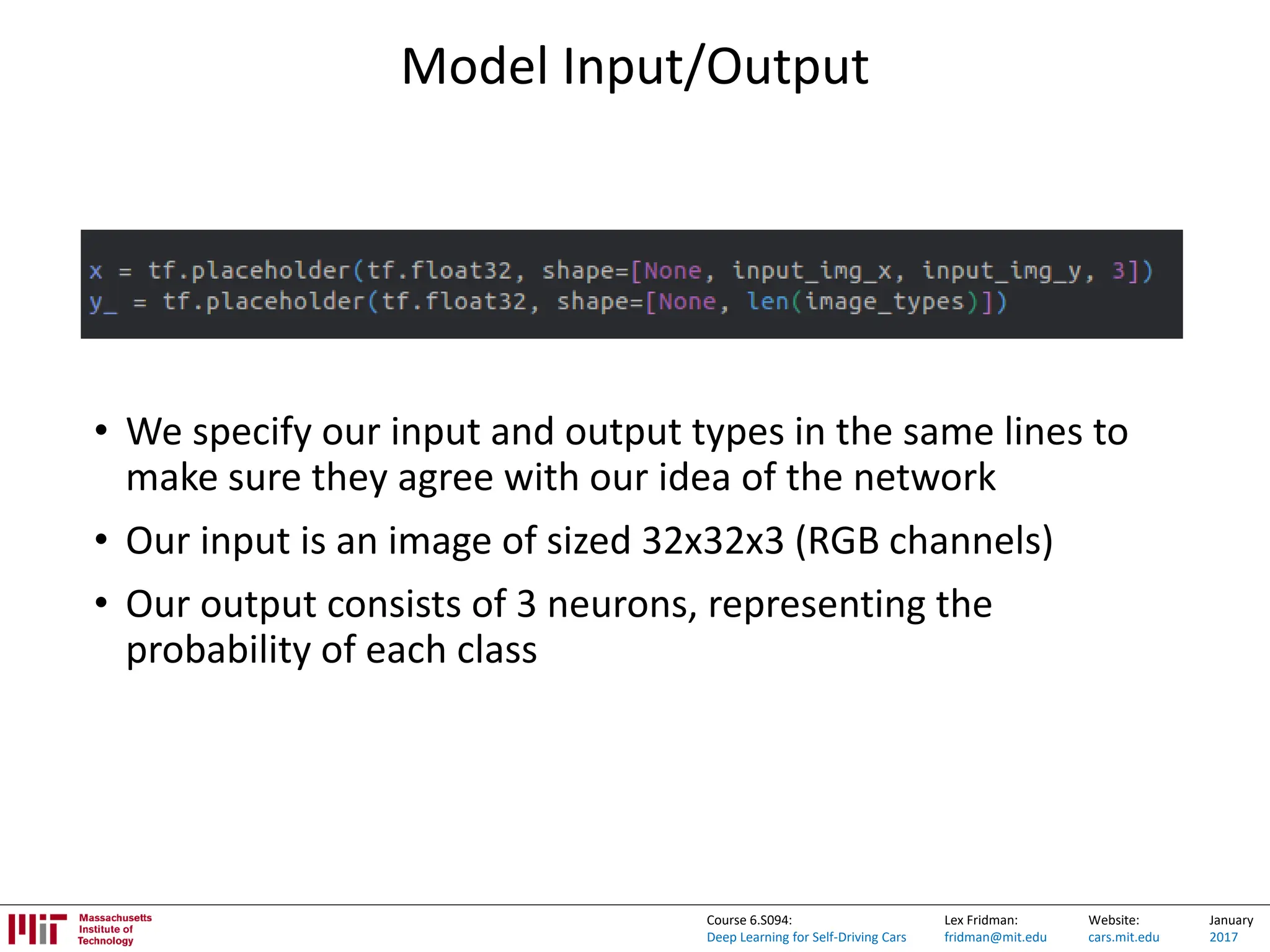
Build the Model: Input and Output
def weight_variable(shape):
initial = tf.truncated_normal(shape, stddev=0.1)
return tf.Variable(initial)
def bias_variable(shape):
initial = tf.constant(0.1, shape=shape)
return tf.Variable(initial)
def conv2d(x, W, stride):
return tf.nn.conv2d(x, W, strides=[1, stride, stride, 1],
padding='VALID')
x = tf.placeholder(tf.float32, shape=[None, 66, 200, 3])
y_ = tf.placeholder(tf.float32, shape=[None, 1])
x_image = x](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-94-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Build the Model: Convolutional Layers
#first convolutional layer
W_conv1 = weight_variable([5, 5, 3, 24])
b_conv1 = bias_variable([24])
h_conv1 = tf.nn.relu(conv2d(x_image, W_conv1, 2) + b_conv1)
#second convolutional layer
W_conv2 = weight_variable([5, 5, 24, 36])
b_conv2 = bias_variable([36])
h_conv2 = tf.nn.relu(conv2d(h_conv1, W_conv2, 2) + b_conv2)
#third convolutional layer
W_conv3 = weight_variable([5, 5, 36, 48])
b_conv3 = bias_variable([48])
h_conv3 = tf.nn.relu(conv2d(h_conv2, W_conv3, 2) + b_conv3)
#fourth convolutional layer
W_conv4 = weight_variable([3, 3, 48, 64])
b_conv4 = bias_variable([64])
h_conv4 = tf.nn.relu(conv2d(h_conv3, W_conv4, 1) + b_conv4)
#fifth convolutional layer
W_conv5 = weight_variable([3, 3, 64, 64])
b_conv5 = bias_variable([64])
h_conv5 = tf.nn.relu(conv2d(h_conv4, W_conv5, 1) + b_conv5)](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-95-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Build the Model: Fully Connected Layers
# fully connected layer 1
W_fc1 = weight_variable([1152, 1164])
b_fc1 = bias_variable([1164])
h_conv5_flat = tf.reshape(h_conv5, [-1, 1152])
h_fc1 = tf.nn.relu(tf.matmul(h_conv5_flat, W_fc1) + b_fc1)
keep_prob = tf.placeholder(tf.float32)
h_fc1_drop = tf.nn.dropout(h_fc1, keep_prob)
# fully connected layer 2
W_fc2 = weight_variable([1164, 100])
b_fc2 = bias_variable([100])
h_fc2 = tf.nn.relu(tf.matmul(h_fc1_drop, W_fc2) + b_fc2)
h_fc2_drop = tf.nn.dropout(h_fc2, keep_prob)
# fully connected layer 3
W_fc3 = weight_variable([100, 50])
b_fc3 = bias_variable([50])
h_fc3 = tf.nn.relu(tf.matmul(h_fc2_drop, W_fc3) + b_fc3)
h_fc3_drop = tf.nn.dropout(h_fc3, keep_prob)
# fully connected layer 4
W_fc4 = weight_variable([50, 10])
b_fc4 = bias_variable([10])
h_fc4 = tf.nn.relu(tf.matmul(h_fc3_drop, W_fc4) + b_fc4)
h_fc4_drop = tf.nn.dropout(h_fc4, keep_prob)
#Output
W_fc5 = weight_variable([10, 1])
b_fc5 = bias_variable([1])
y = tf.mul(tf.atan(tf.matmul(h_fc4_drop, W_fc5) + b_fc5), 2)](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-96-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Run the Model
import tensorflow as tf
import scipy.misc
import model
import cv2
sess = tf.InteractiveSession()
saver = tf.train.Saver()
saver.restore(sess, "save/model.ckpt")
img = cv2.imread('steering_wheel_image.jpg',0)
rows,cols = img.shape
smoothed_angle = 0
cap = cv2.VideoCapture(0)
while(cv2.waitKey(10) != ord('q')):
ret, frame = cap.read()
image = scipy.misc.imresize(frame, [66, 200]) / 255.0
degrees = model.y.eval(feed_dict={model.x: [image], model.keep_prob:
1.0})[0][0]
* 180 / scipy.pi
cv2.imshow('frame', frame)
smoothed_angle += 0.2 * pow(abs((degrees - smoothed_angle)), 2.0 / 3.0) *
(degrees - smoothed_angle) / abs(degrees - smoothed_angle)
M = cv2.getRotationMatrix2D((cols/2,rows/2),-smoothed_angle,1)
dst = cv2.warpAffine(img,M,(cols,rows))
cv2.imshow("steering wheel", dst)
cap.release()
cv2.destroyAllWindows()](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-98-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
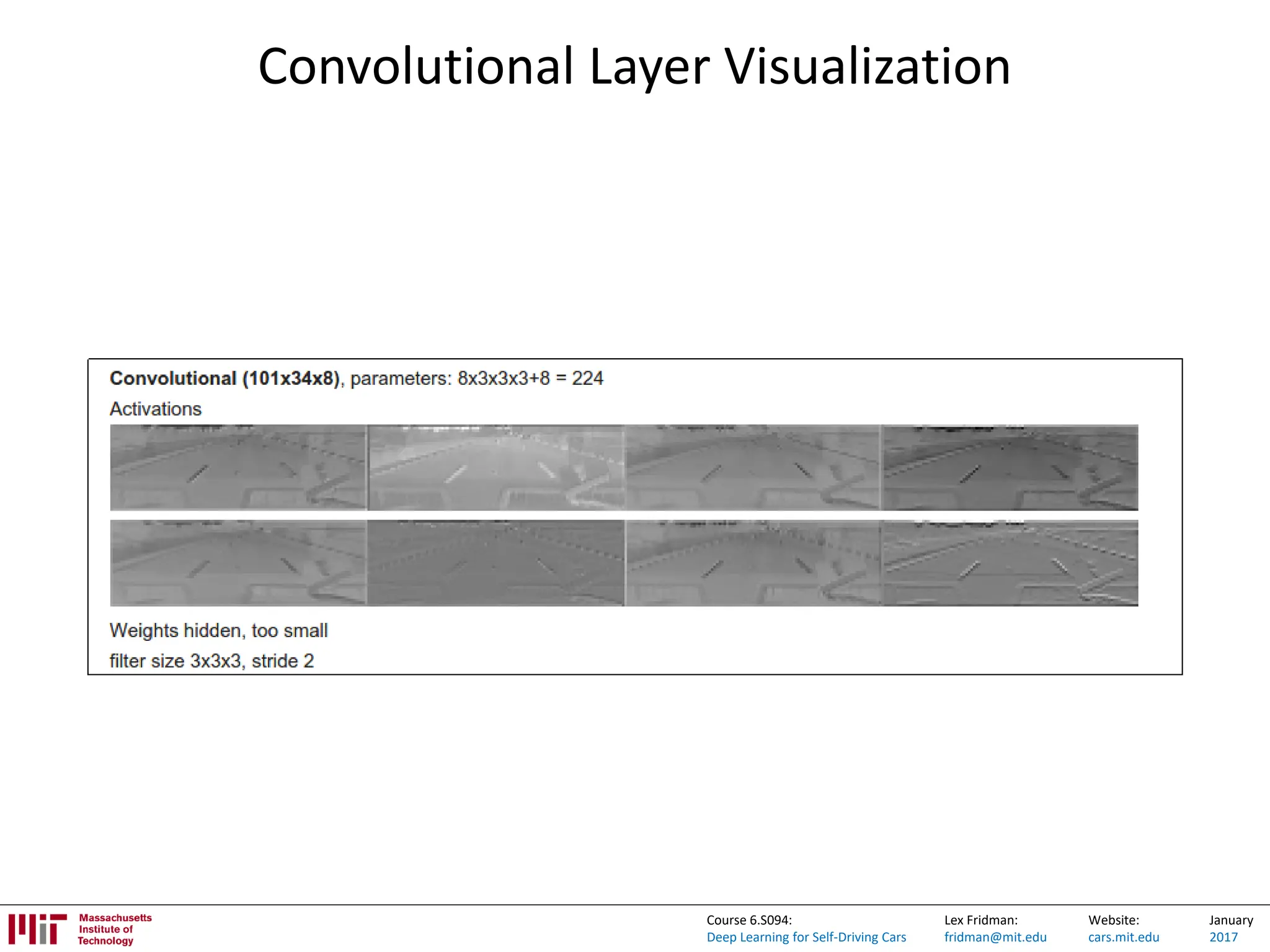
Convolutional Layer
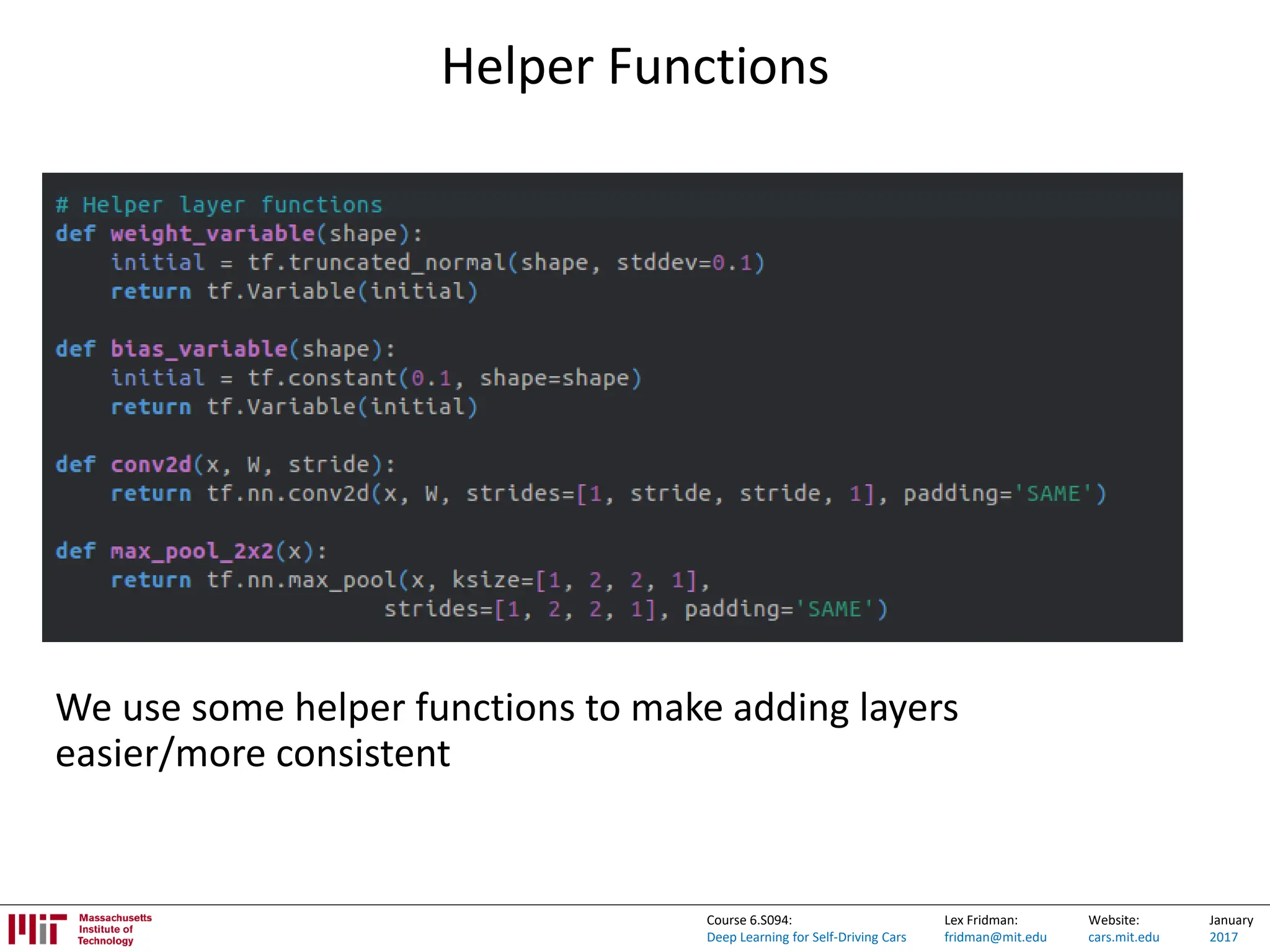
• Here we specify our first convolutional layer using our helper
function
• W_conv1 – a 4D tensor representing the weights [filter_x,
filter_y, previous layer neurons, # of filters]
• b_conv1 – our simple addition variable
• h_conv1 – our actual layer/activation](https://image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-104-2048.jpg)








![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Supervised
Learning
Unsupervised
Learning
Semi-Supervised
Learning
Reinforcement
Learning
Standard supervised learning pipeline:
Computer Vision is Machine Learning
References: [81]
Computer Vision](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-9-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Images are Numbers
References: [89]
• Regression: The output variable takes continuous values
• Classification: The output variable takes class labels
• Underneath it may still produce continuous values such as
probability of belonging to a particular class.](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-10-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Computer Vision is Hard
References: [66, 69, 89]](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-11-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Image Classification Pipeline
References: [81, 89]](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-12-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Famous Computer Vision Datasets
References: [90, 91, 92, 93]
MNIST: handwritten digits ImageNet: WordNet hierarchy
CIFAR-10(0): tiny images Places: natural scenes](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-13-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Let’s Build an Image Classifier for CIFAR-10
References: [89, 91]](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-14-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Let’s Build an Image Classifier for CIFAR-10
References: [89, 91]
Accuracy
Random: 10%
Our image-diff (with L1): 38.6%
Our image-diff (with L2): 35.4%](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-15-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
K-Nearest Neighbors: Generalizing the Image-Diff Classifier
References: [89]
Tuning (hyper)parameters:](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-16-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
K-Nearest Neighbors: Generalizing the Image-Diff Classifier
References: [89, 94]
Accuracy
Random: 10%
Training and testing on the same data: 35.4%
7-Nearest Neighbors: ~30%
Human: ~94%
…
Convolutional Neural Networks: ~95%](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-17-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Reminder: Weighing the Evidence
References: [78]
Evidence
Decisions](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-18-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Reminder: Classify and Image of a Number
References: [80]
Input:
(28x28)
Network:](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-19-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Reminder: “Learning” is Optimization of a Function
References: [63, 80]
Ground truth for “6”:
“Loss” function:](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-20-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Convolutional Neural Networks
References: [95]
Regular neural network (fully connected):
Convolutional neural network:
Each layer takes a 3d volume, produces 3d volume with some
smooth function that may or may not have parameters.](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-21-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Convolutional Neural Networks: Layers
• INPUT [32x32x3] will hold the raw pixel values of the image, in this case an image of width 32, height 32, and
with three color channels R,G,B.
• CONV layer will compute the output of neurons that are connected to local regions in the input, each computing
a dot product between their weights and a small region they are connected to in the input volume. This may
result in volume such as [32x32x12] if we decided to use 12 filters.
• RELU layer will apply an elementwise activation function, such as the max(0,x) thresholding at zero. This leaves
the size of the volume unchanged ([32x32x12]).
• POOL layer will perform a downsampling operation along the spatial dimensions (width, height), resulting in
volume such as [16x16x12].
• FC (i.e. fully-connected) layer will compute the class scores, resulting in volume of size [1x1x10], where each of
the 10 numbers correspond to a class score, such as among the 10 categories of CIFAR-10. As with ordinary
Neural Networks and as the name implies, each neuron in this layer will be connected to all the numbers in the
previous volume.
References: [95]](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-22-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Dealing with Images: Local Connectivity
Same neuron. Just more focused (narrow “receptive field”).
The parameters on a each filter are spatially “shared”
(if a feature is useful in one place, it’s useful elsewhere)
References: [95]](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-23-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
ConvNets: Spatial Arrangement of Output Volume
• Depth: number of filters
• Stride: filter step size (when we “slide” it)
• Padding: zero-pad the input
References: [95]](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-24-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
References: [95]](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-25-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
ConvNets: Pooling
References: [95]](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-26-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Computer Vision:
Object Recognition / Classification
References: [4]](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-27-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Original Ground Truth FCN-8
Computer Vision:
Segmentation
References: [96]](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-28-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Computer Vision:
Object Detection
References: [97]](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-29-2048.jpg)

















![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
SLAM: Simultaneous Localization and Mapping
What works: SIFT and optical flow
References: [98, 99]](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-47-2048.jpg)











































![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
ConvNetJS Evaluation - Forward Pass
• Now we can use our extracted volume in the forward pass
by calling net.forward(our_volume)
• The predicted value is stored in the output neuron:
• var prediction = net.forward(vol);
• var raw_regression_value = prediction.w[0];
• Because we min-max normalized our inputs while training
the network, we need to transform our outputs – this is just
the reverse transformation we performed on input:
• Wheel value = (raw_regression_value * total_wheel_range) –
wheel_min
• We visualize the predicted and actual steering wheel values
and calculate the error](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-91-2048.jpg)


![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Build the Model: Input and Output
def weight_variable(shape):
initial = tf.truncated_normal(shape, stddev=0.1)
return tf.Variable(initial)
def bias_variable(shape):
initial = tf.constant(0.1, shape=shape)
return tf.Variable(initial)
def conv2d(x, W, stride):
return tf.nn.conv2d(x, W, strides=[1, stride, stride, 1],
padding='VALID')
x = tf.placeholder(tf.float32, shape=[None, 66, 200, 3])
y_ = tf.placeholder(tf.float32, shape=[None, 1])
x_image = x](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-94-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Build the Model: Convolutional Layers
#first convolutional layer
W_conv1 = weight_variable([5, 5, 3, 24])
b_conv1 = bias_variable([24])
h_conv1 = tf.nn.relu(conv2d(x_image, W_conv1, 2) + b_conv1)
#second convolutional layer
W_conv2 = weight_variable([5, 5, 24, 36])
b_conv2 = bias_variable([36])
h_conv2 = tf.nn.relu(conv2d(h_conv1, W_conv2, 2) + b_conv2)
#third convolutional layer
W_conv3 = weight_variable([5, 5, 36, 48])
b_conv3 = bias_variable([48])
h_conv3 = tf.nn.relu(conv2d(h_conv2, W_conv3, 2) + b_conv3)
#fourth convolutional layer
W_conv4 = weight_variable([3, 3, 48, 64])
b_conv4 = bias_variable([64])
h_conv4 = tf.nn.relu(conv2d(h_conv3, W_conv4, 1) + b_conv4)
#fifth convolutional layer
W_conv5 = weight_variable([3, 3, 64, 64])
b_conv5 = bias_variable([64])
h_conv5 = tf.nn.relu(conv2d(h_conv4, W_conv5, 1) + b_conv5)](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-95-2048.jpg)
![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Build the Model: Fully Connected Layers
# fully connected layer 1
W_fc1 = weight_variable([1152, 1164])
b_fc1 = bias_variable([1164])
h_conv5_flat = tf.reshape(h_conv5, [-1, 1152])
h_fc1 = tf.nn.relu(tf.matmul(h_conv5_flat, W_fc1) + b_fc1)
keep_prob = tf.placeholder(tf.float32)
h_fc1_drop = tf.nn.dropout(h_fc1, keep_prob)
# fully connected layer 2
W_fc2 = weight_variable([1164, 100])
b_fc2 = bias_variable([100])
h_fc2 = tf.nn.relu(tf.matmul(h_fc1_drop, W_fc2) + b_fc2)
h_fc2_drop = tf.nn.dropout(h_fc2, keep_prob)
# fully connected layer 3
W_fc3 = weight_variable([100, 50])
b_fc3 = bias_variable([50])
h_fc3 = tf.nn.relu(tf.matmul(h_fc2_drop, W_fc3) + b_fc3)
h_fc3_drop = tf.nn.dropout(h_fc3, keep_prob)
# fully connected layer 4
W_fc4 = weight_variable([50, 10])
b_fc4 = bias_variable([10])
h_fc4 = tf.nn.relu(tf.matmul(h_fc3_drop, W_fc4) + b_fc4)
h_fc4_drop = tf.nn.dropout(h_fc4, keep_prob)
#Output
W_fc5 = weight_variable([10, 1])
b_fc5 = bias_variable([1])
y = tf.mul(tf.atan(tf.matmul(h_fc4_drop, W_fc5) + b_fc5), 2)](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-96-2048.jpg)

![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Run the Model
import tensorflow as tf
import scipy.misc
import model
import cv2
sess = tf.InteractiveSession()
saver = tf.train.Saver()
saver.restore(sess, "save/model.ckpt")
img = cv2.imread('steering_wheel_image.jpg',0)
rows,cols = img.shape
smoothed_angle = 0
cap = cv2.VideoCapture(0)
while(cv2.waitKey(10) != ord('q')):
ret, frame = cap.read()
image = scipy.misc.imresize(frame, [66, 200]) / 255.0
degrees = model.y.eval(feed_dict={model.x: [image], model.keep_prob:
1.0})[0][0]
* 180 / scipy.pi
cv2.imshow('frame', frame)
smoothed_angle += 0.2 * pow(abs((degrees - smoothed_angle)), 2.0 / 3.0) *
(degrees - smoothed_angle) / abs(degrees - smoothed_angle)
M = cv2.getRotationMatrix2D((cols/2,rows/2),-smoothed_angle,1)
dst = cv2.warpAffine(img,M,(cols,rows))
cv2.imshow("steering wheel", dst)
cap.release()
cv2.destroyAllWindows()](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-98-2048.jpg)





![Lex Fridman:
fridman@mit.edu
Website:
cars.mit.edu
January
2017
Course 6.S094:
Deep Learning for Self-Driving Cars
Convolutional Layer
• Here we specify our first convolutional layer using our helper
function
• W_conv1 – a 4D tensor representing the weights [filter_x,
filter_y, previous layer neurons, # of filters]
• b_conv1 – our simple addition variable
• h_conv1 – our actual layer/activation](https://crownmelresort.com/image.slidesharecdn.com/convolutionalneuralnetworks2017-251113165251-befc11eb/75/Convolutional-Neural-Networks-CNN-and-Computer-Vision-104-2048.jpg)