Download as PDF, PPTX

![5 | © Cocotec Ltd 2022
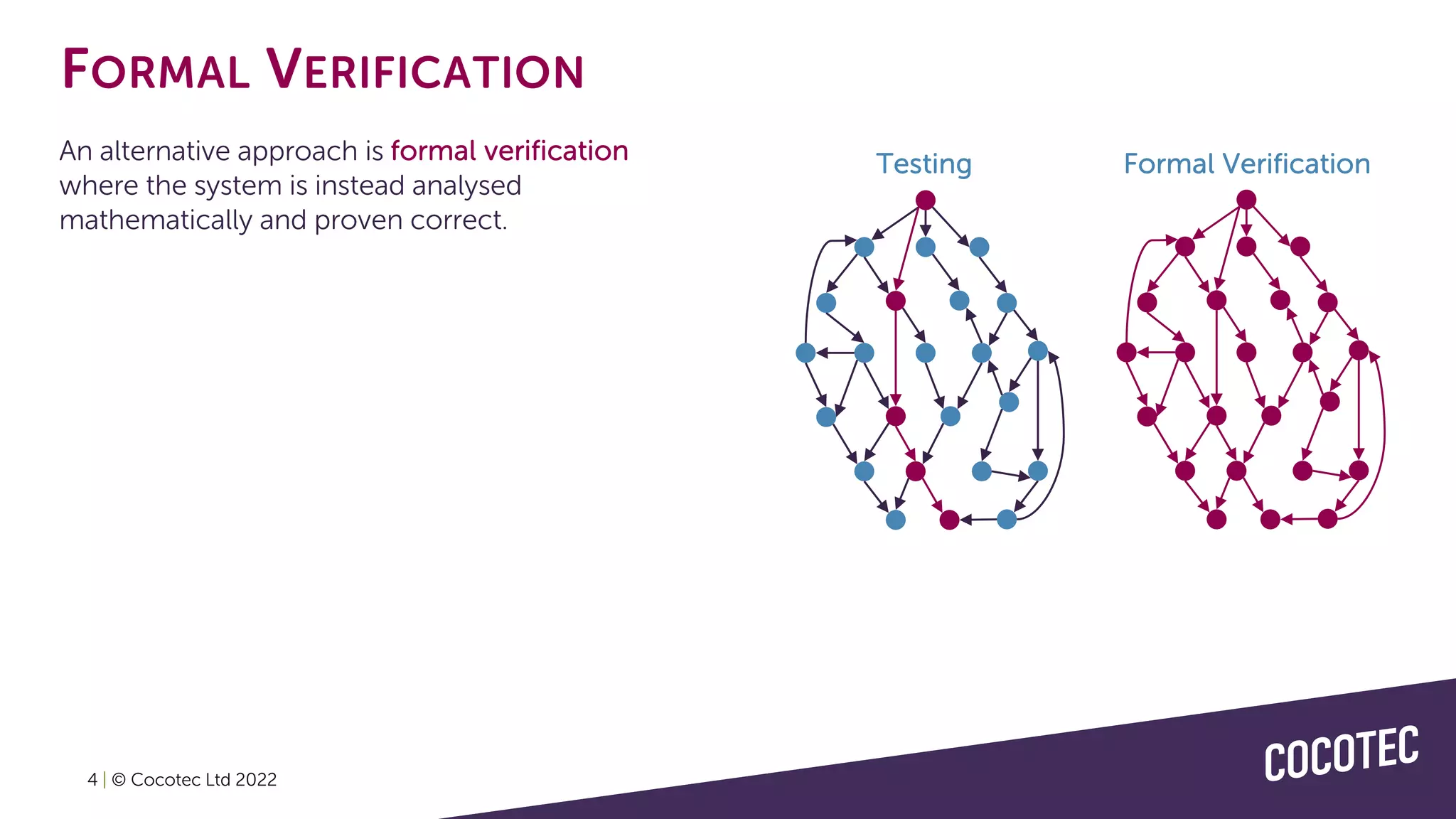
An alternative approach is formal verification
where the system is instead analysed
mathematically and proven correct.
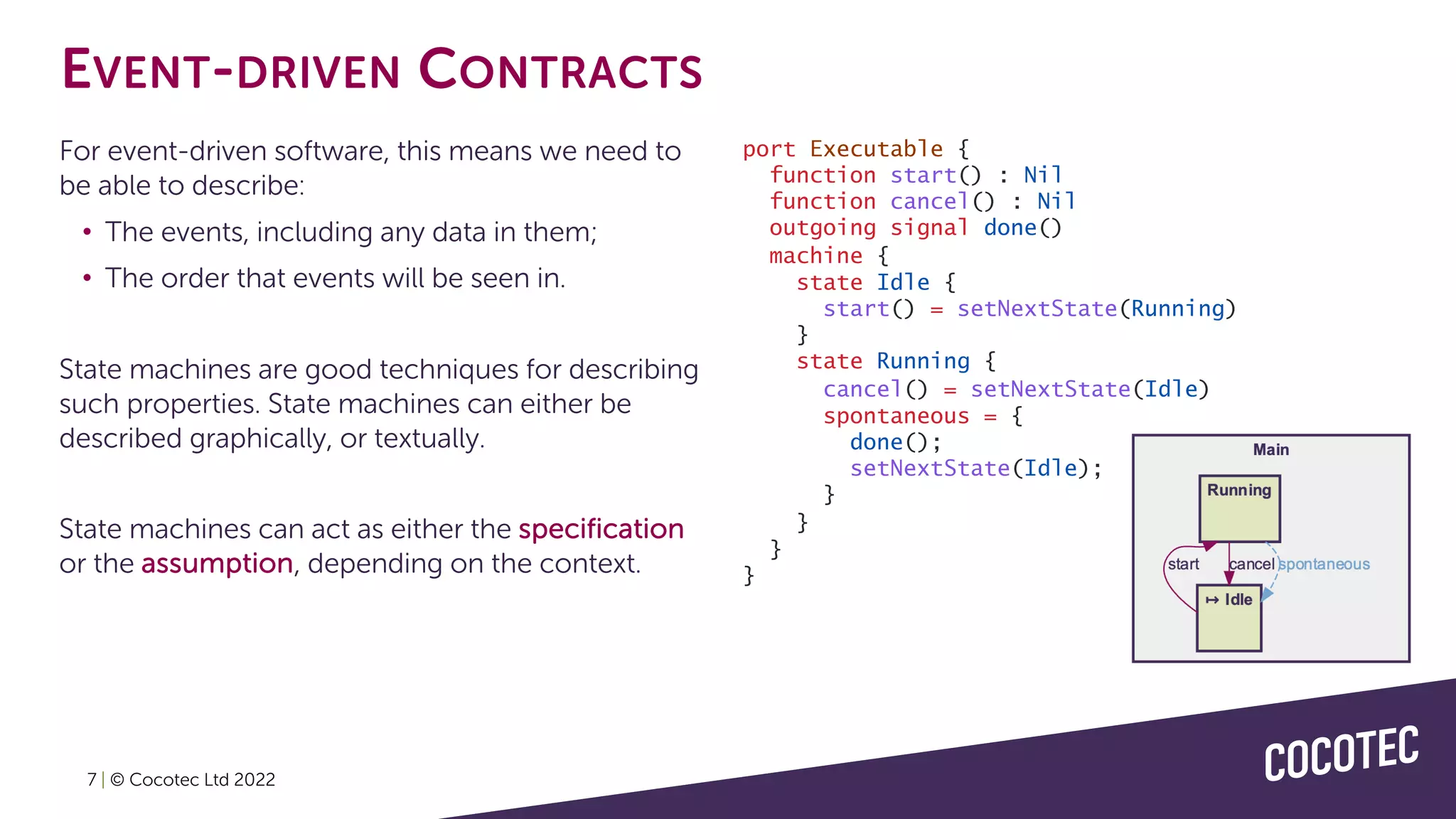
To apply formal verification we have to:
• Formally describe what we want to prove;
• Formally describe what we can assume.
Most verification tools for conventional programs
use per-function contracts based on pre- and
post- conditions to formalise this.
FORMAL VERIFICATION
/**
* pre size > 0
* post size' = size – 1
&& return_value == contents[size - 1]
*/
template <typename T>
T stack<T>::pop_front() {
…
}](https://image.slidesharecdn.com/tomgibson-robinson2022-10-11noanimation-221018084210-ec4e558d/75/Taming-event-driven-software-via-formal-verification-5-2048.jpg)
![9 | © Cocotec Ltd 2022
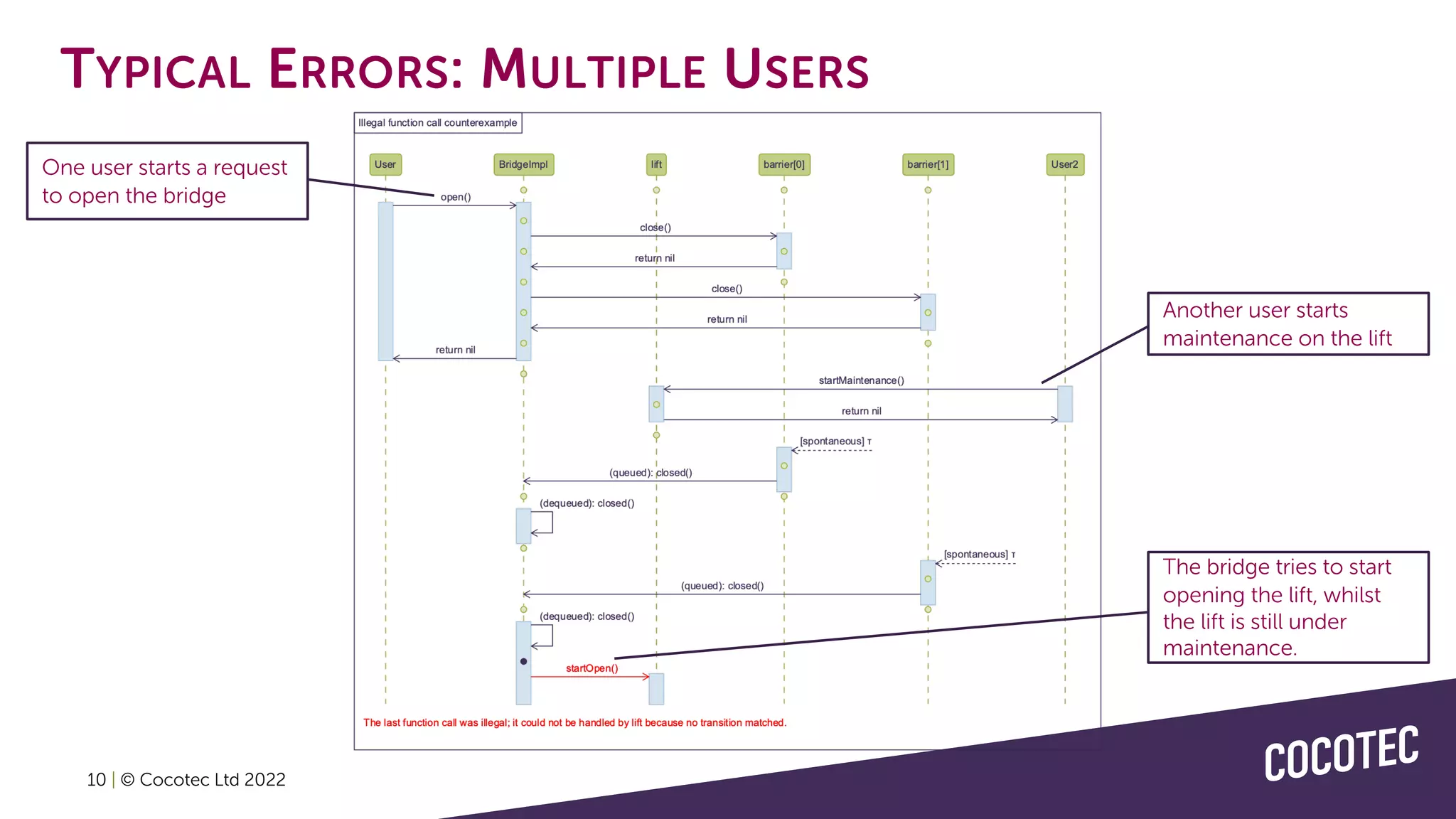
TYPICAL ERRORS: DESYNCHRONISATION
barrier[1] detects an
obstruction
Component handles the
obstruction and
considers the request
cancelled
When a new open()
request starts, the
component calls close
on the still-closing
barrier[0]](https://image.slidesharecdn.com/tomgibson-robinson2022-10-11noanimation-221018084210-ec4e558d/75/Taming-event-driven-software-via-formal-verification-9-2048.jpg)





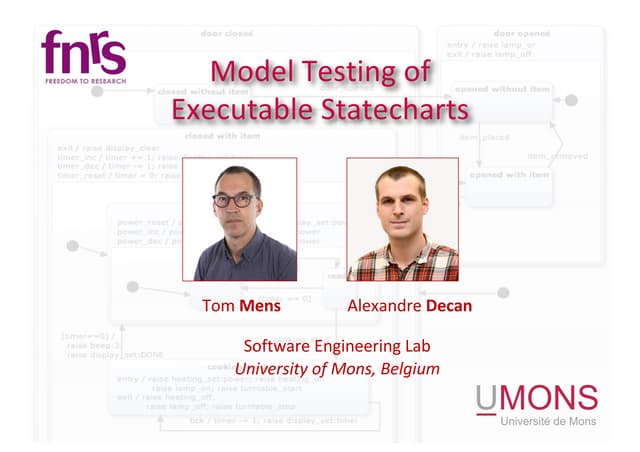
![5 | © Cocotec Ltd 2022
An alternative approach is formal verification
where the system is instead analysed
mathematically and proven correct.
To apply formal verification we have to:
• Formally describe what we want to prove;
• Formally describe what we can assume.
Most verification tools for conventional programs
use per-function contracts based on pre- and
post- conditions to formalise this.
FORMAL VERIFICATION
/**
* pre size > 0
* post size' = size – 1
&& return_value == contents[size - 1]
*/
template <typename T>
T stack<T>::pop_front() {
…
}](https://crownmelresort.com/image.slidesharecdn.com/tomgibson-robinson2022-10-11noanimation-221018084210-ec4e558d/75/Taming-event-driven-software-via-formal-verification-5-2048.jpg)



![9 | © Cocotec Ltd 2022
TYPICAL ERRORS: DESYNCHRONISATION
barrier[1] detects an
obstruction
Component handles the
obstruction and
considers the request
cancelled
When a new open()
request starts, the
component calls close
on the still-closing
barrier[0]](https://crownmelresort.com/image.slidesharecdn.com/tomgibson-robinson2022-10-11noanimation-221018084210-ec4e558d/75/Taming-event-driven-software-via-formal-verification-9-2048.jpg)








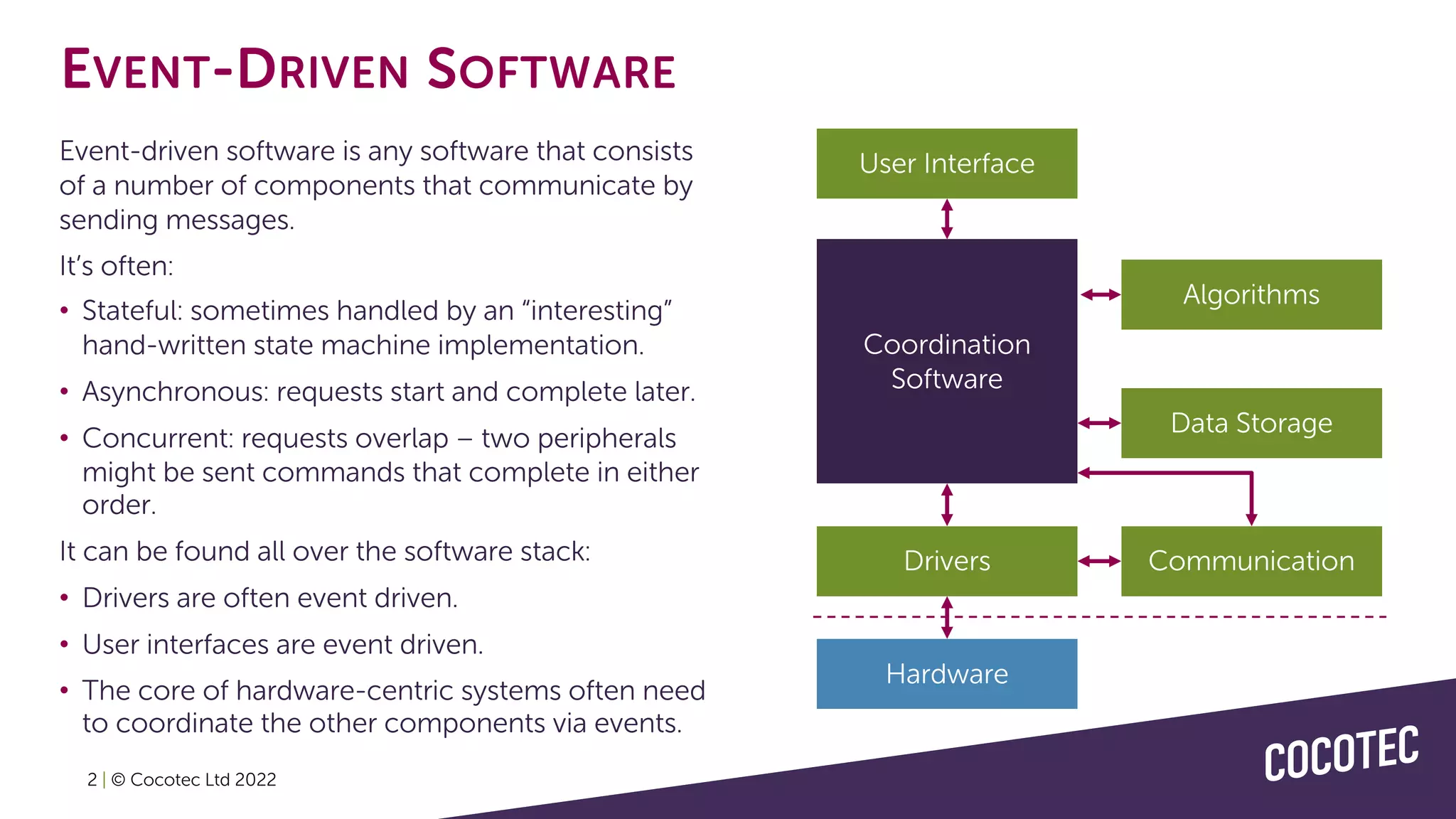
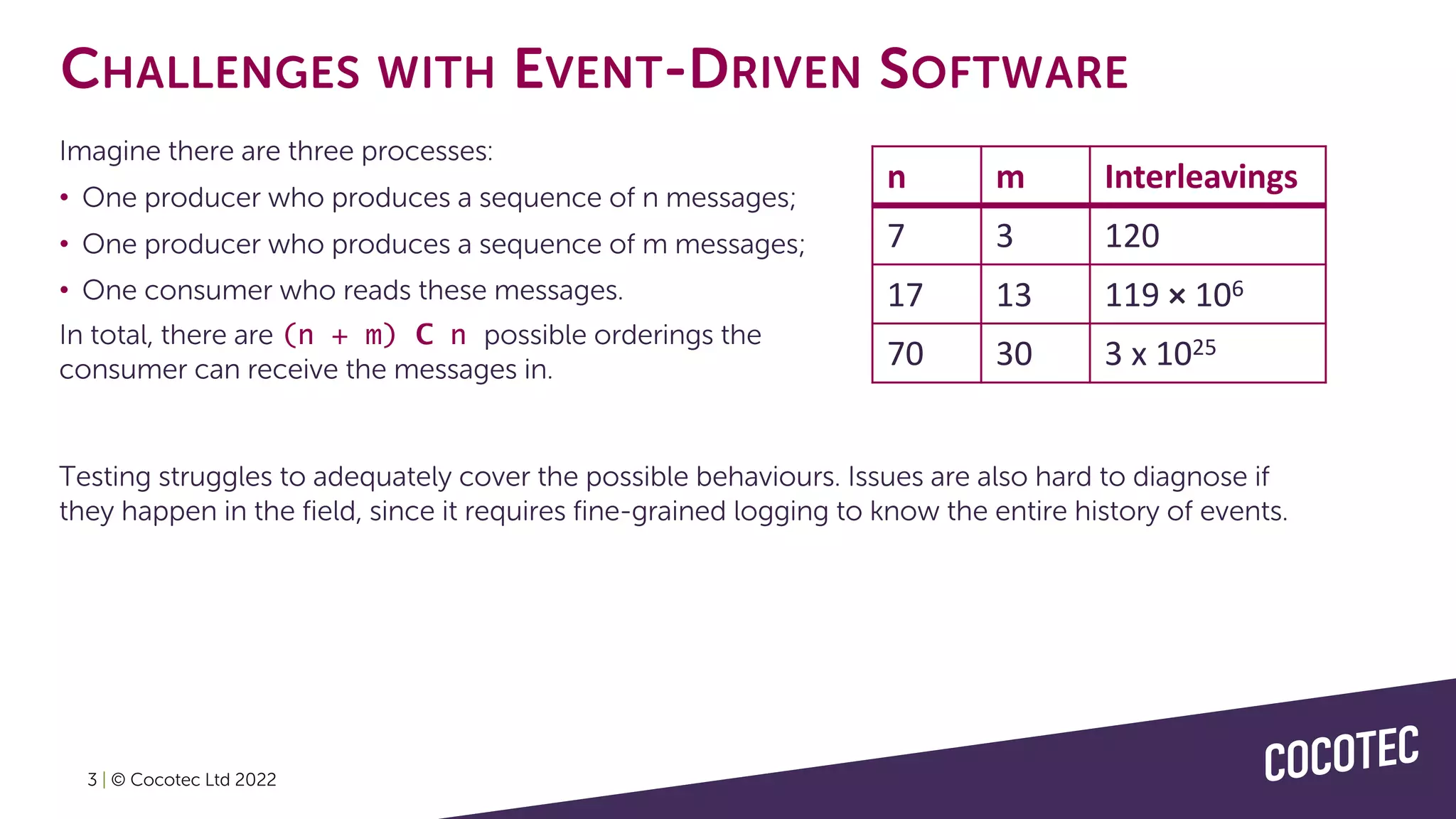
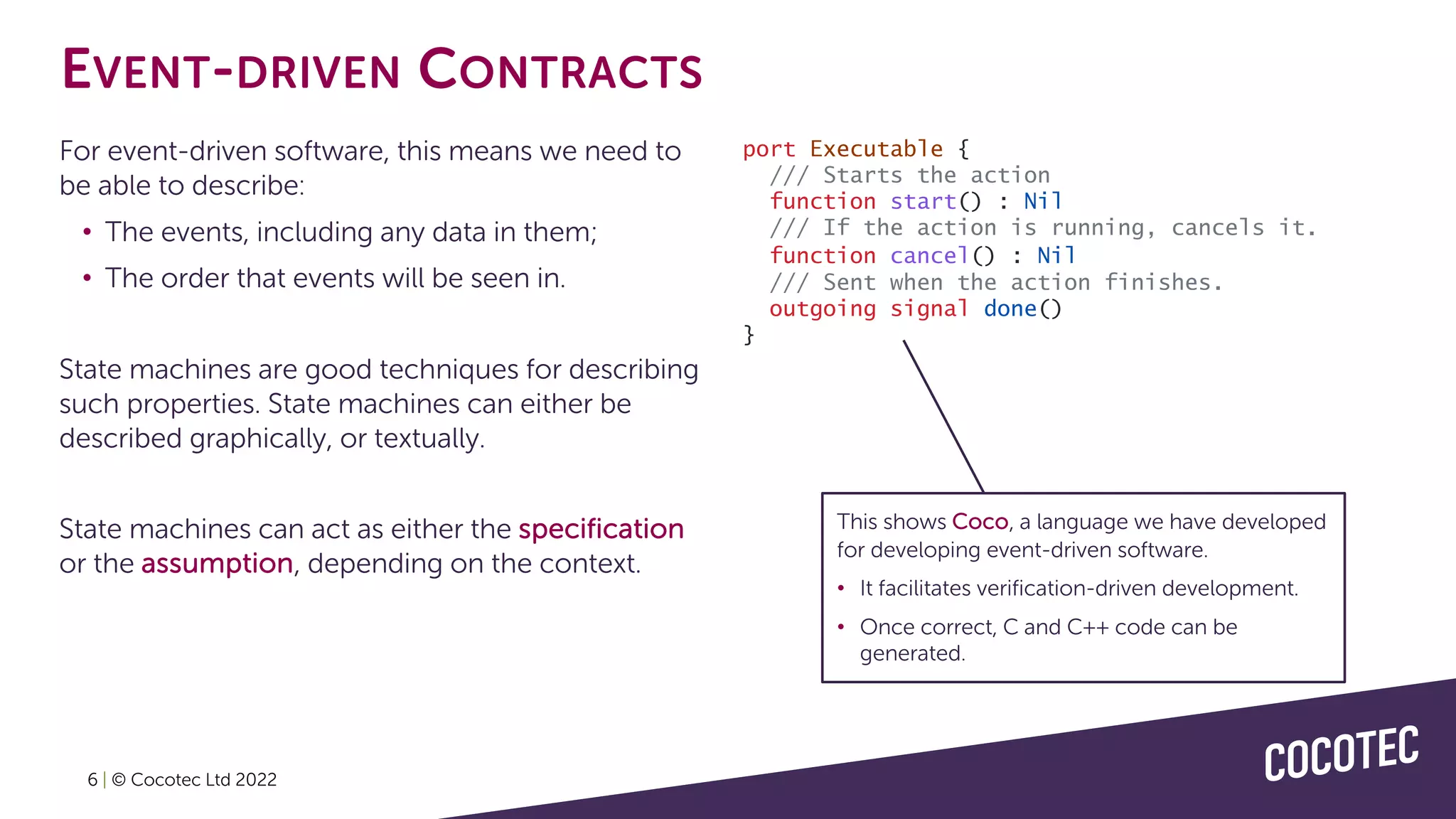
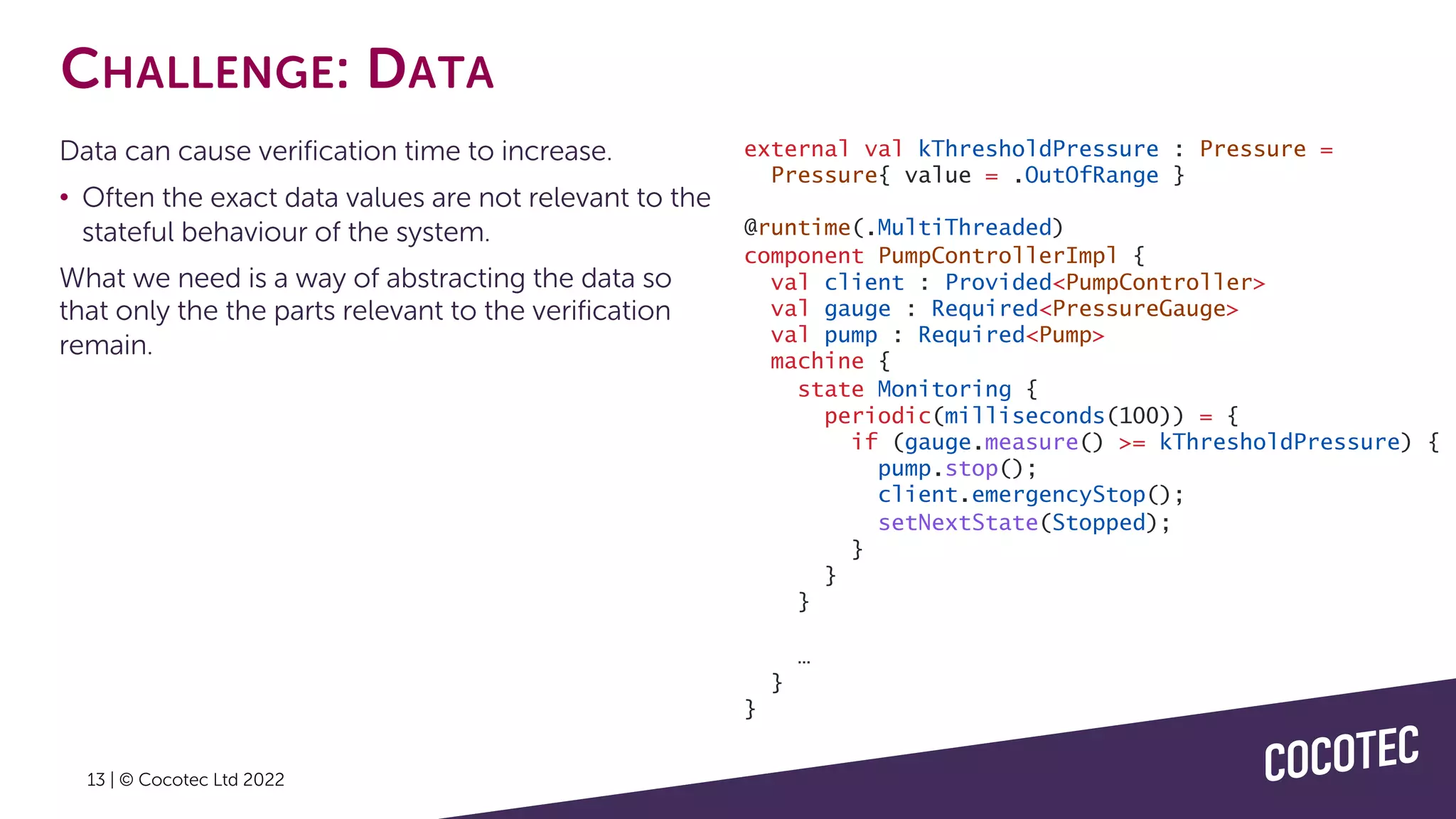
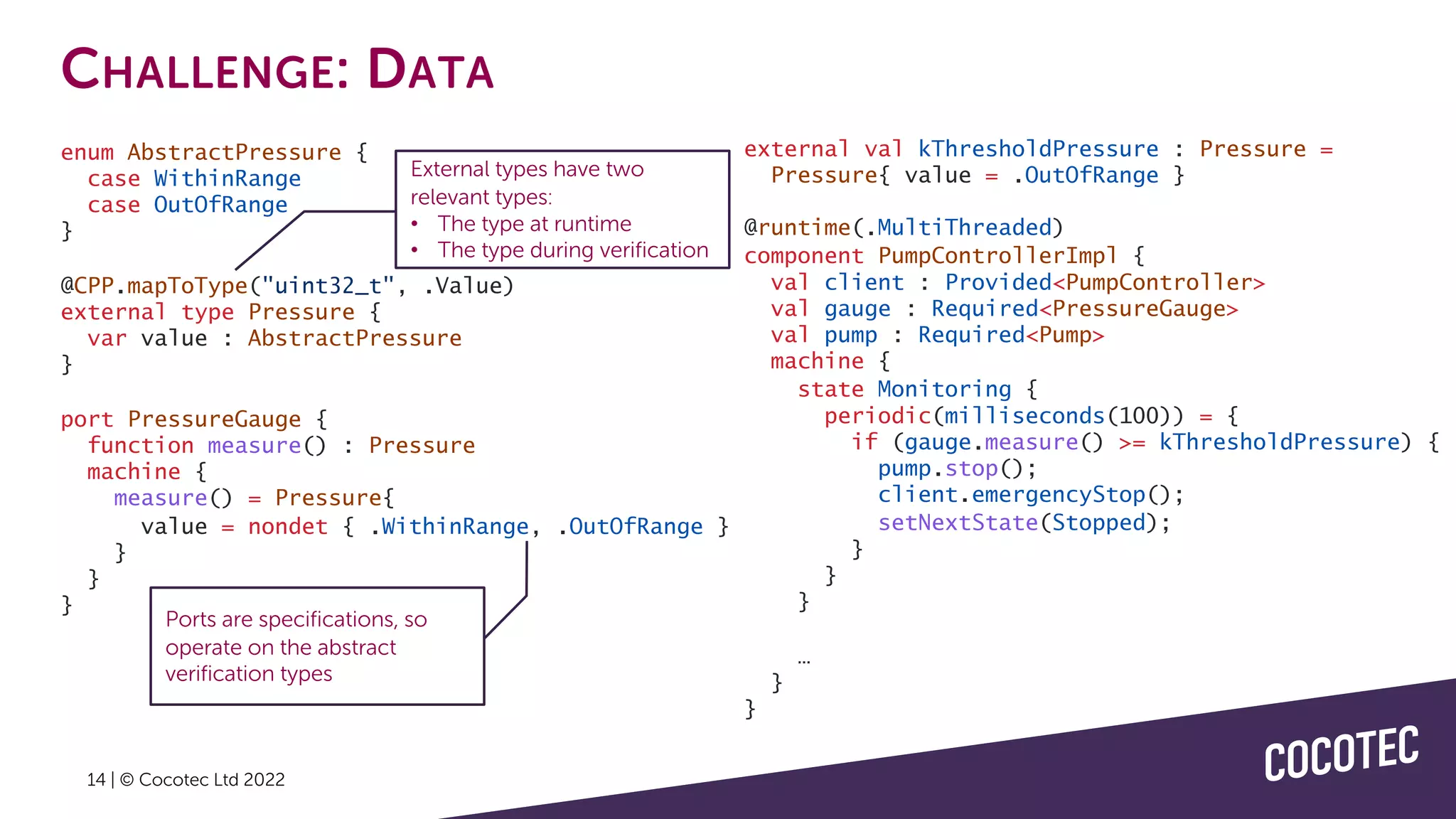
The document discusses the complexities of event-driven software, highlighting the challenges in testing and diagnosing issues due to the multitude of possible message orderings. It proposes formal verification as a mathematical approach to prove software correctness, emphasizing the importance of accurately describing events and the use of state machines in this verification process. Additionally, it outlines the development of a language called Coco, designed to facilitate verification-driven development of event-driven software, and addresses challenges such as data abstraction and handling liveness properties.




























































![Support, Monitoring, Continuous Improvement & Scaling Agentic Automation [3/3]](https://cdn.slidesharecdn.com/ss_thumbnails/agenticcommunityseries-day3-cfd-251120170304-ddef8112-thumbnail.jpg?width=640&height=640&fit=bounds)

