Download to read offline
![M. dos Santos, S. Hallé, F. Petrillo
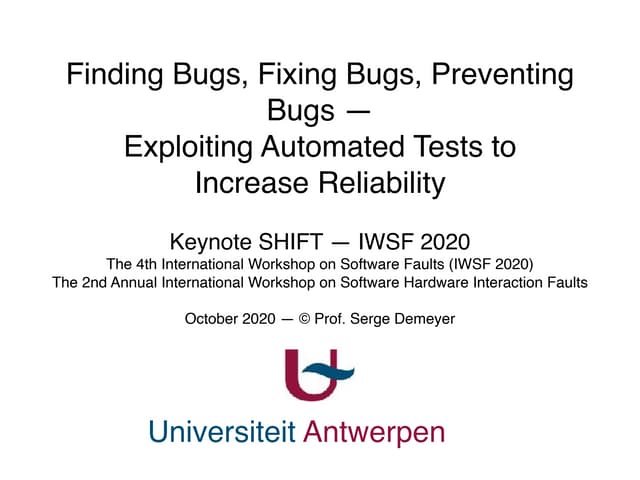
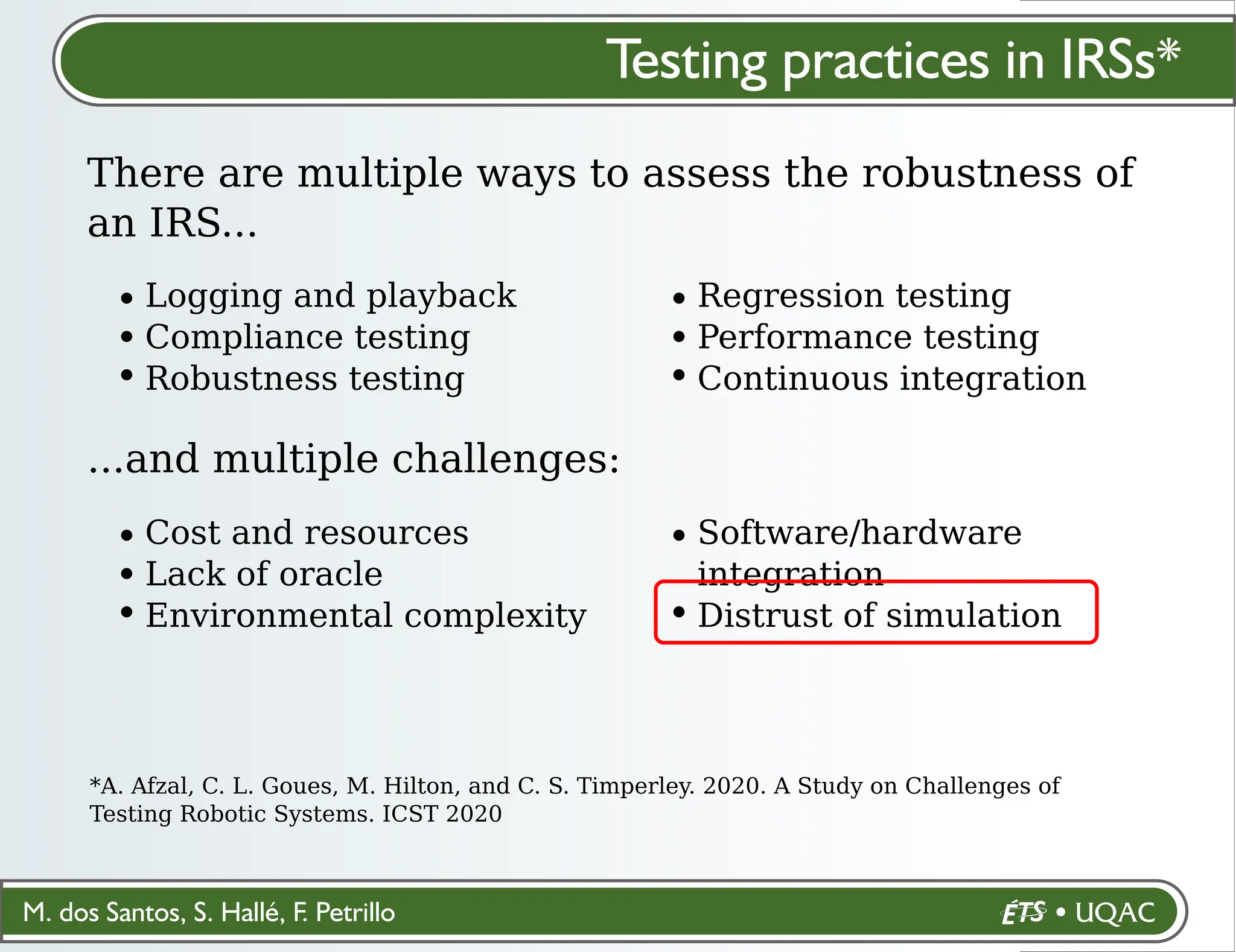
Testing practices in IRSs*
There are multiple ways to assess the robustness of
an IRS...
*A. Afzal, C. L. Goues, M. Hilton, and C. S. Timperley. 2020. A Study on Challenges of
Testing Robotic Systems. ICST 2020
Logging and playback
Compliance testing
Robustness testing
Regression testing
Performance testing
Continuous integration
...and multiple challenges:
Cost and resources
Lack of oracle
Environmental complexity
Software/hardware
integration
Distrust of simulation
"We mostly do field testing.
That’s what really affects what
happens. [...] Simulation just doesn’t
reflect the real world."](https://image.slidesharecdn.com/slides-251117132046-6e116935/75/Mutation-Testing-for-Industrial-Robotic-Systems-FMAS-2025-6-2048.jpg)

![M. dos Santos, S. Hallé, F. Petrillo
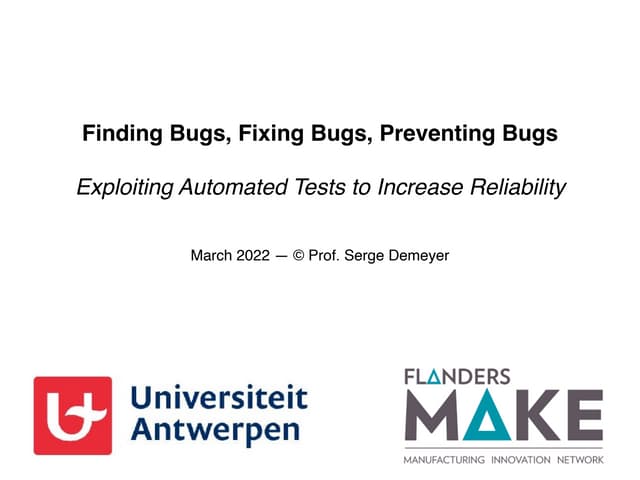
Example
Program
function sum(a)
local t = 0
for i = 0, |a| - 1 do
t = t + a[i]
end
return t
end
P](https://image.slidesharecdn.com/slides-251117132046-6e116935/75/Mutation-Testing-for-Industrial-Robotic-Systems-FMAS-2025-19-2048.jpg)
![M. dos Santos, S. Hallé, F. Petrillo
Example
Program
function sum(a)
local t = 0
for i = 0, |a| - 1 do
t = t + a[i]
end
return t
end
P
assert sum([0]) == 0
1
assert sum([2,0]) == 2
2
assert sum([]) == 0
3
Test cases](https://image.slidesharecdn.com/slides-251117132046-6e116935/75/Mutation-Testing-for-Industrial-Robotic-Systems-FMAS-2025-20-2048.jpg)
![M. dos Santos, S. Hallé, F. Petrillo
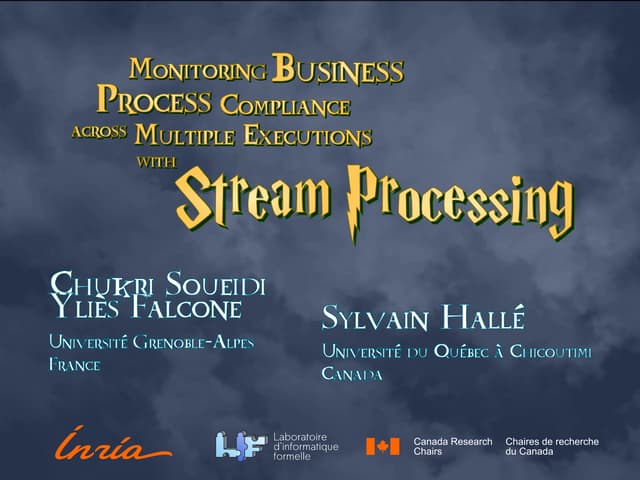
Example
Program
function sum(a)
local t = 0
for i = 0, |a| - 1 do
t = t + a[i]
end
return t
end
P
assert sum([0]) == 0
1
assert sum([2,0]) == 2
2
assert sum([]) == 0
3
Test cases](https://image.slidesharecdn.com/slides-251117132046-6e116935/75/Mutation-Testing-for-Industrial-Robotic-Systems-FMAS-2025-21-2048.jpg)
![M. dos Santos, S. Hallé, F. Petrillo
Example
Program
function sum(a)
local t = 0
for i = 0, |a| - 1 do
t = t + a[i]
end
return t
end
P
assert sum([0]) == 0
1
assert sum([2,0]) == 2
2
assert sum([]) == 0
3
Test cases
Mutant A
function sum(a)
local t = 1
for i = 0, |a| - 1 do
t = t + a[i]
end
return t
end
M](https://image.slidesharecdn.com/slides-251117132046-6e116935/75/Mutation-Testing-for-Industrial-Robotic-Systems-FMAS-2025-22-2048.jpg)
![M. dos Santos, S. Hallé, F. Petrillo
Example
Program
function sum(a)
local t = 0
for i = 0, |a| - 1 do
t = t + a[i]
end
return t
end
P
assert sum([0]) == 0
1
assert sum([2,0]) == 2
2
assert sum([]) == 0
3
Test cases
Mutant A
function sum(a)
local t = 1
for i = 0, |a| - 1 do
t = t + a[i]
end
return t
end
M](https://image.slidesharecdn.com/slides-251117132046-6e116935/75/Mutation-Testing-for-Industrial-Robotic-Systems-FMAS-2025-23-2048.jpg)
![M. dos Santos, S. Hallé, F. Petrillo
Example
Program
function sum(a)
local t = 0
for i = 0, |a| - 1 do
t = t + a[i]
end
return t
end
P
assert sum([0]) == 0
1
assert sum([2,0]) == 2
2
assert sum([]) == 0
3
Test cases
Mutant A
function sum(a)
local t = 1
for i = 0, |a| - 1 do
t = t + a[i]
end
return t
end
M
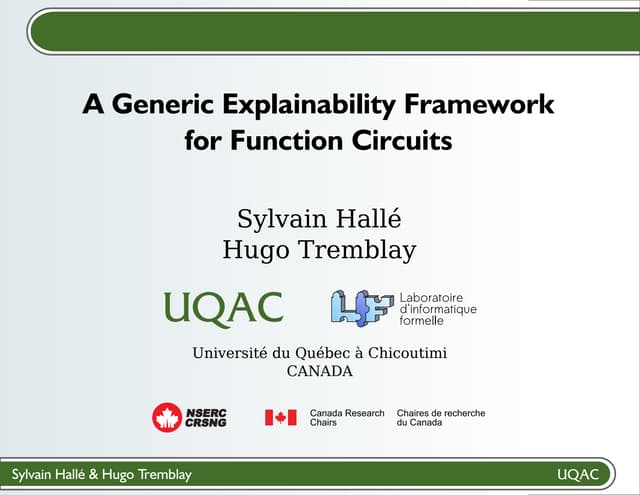
Mutant B
function sum(a)
local t = 0
for i = 0, |a| - 2 do
t = t + a[i]
end
return t
end
M](https://image.slidesharecdn.com/slides-251117132046-6e116935/75/Mutation-Testing-for-Industrial-Robotic-Systems-FMAS-2025-24-2048.jpg)
![M. dos Santos, S. Hallé, F. Petrillo
Example
Program
function sum(a)
local t = 0
for i = 0, |a| - 1 do
t = t + a[i]
end
return t
end
P
assert sum([0]) == 0
1
assert sum([2,0]) == 2
2
assert sum([]) == 0
3
Test cases
Mutant A
function sum(a)
local t = 1
for i = 0, |a| - 1 do
t = t + a[i]
end
return t
end
M
Mutant B
function sum(a)
local t = 0
for i = 0, |a| - 2 do
t = t + a[i]
end
return t
end
M](https://image.slidesharecdn.com/slides-251117132046-6e116935/75/Mutation-Testing-for-Industrial-Robotic-Systems-FMAS-2025-25-2048.jpg)


























![M. dos Santos, S. Hallé, F. Petrillo
Testing practices in IRSs*
There are multiple ways to assess the robustness of
an IRS...
*A. Afzal, C. L. Goues, M. Hilton, and C. S. Timperley. 2020. A Study on Challenges of
Testing Robotic Systems. ICST 2020
Logging and playback
Compliance testing
Robustness testing
Regression testing
Performance testing
Continuous integration
...and multiple challenges:
Cost and resources
Lack of oracle
Environmental complexity
Software/hardware
integration
Distrust of simulation
"We mostly do field testing.
That’s what really affects what
happens. [...] Simulation just doesn’t
reflect the real world."](https://crownmelresort.com/image.slidesharecdn.com/slides-251117132046-6e116935/75/Mutation-Testing-for-Industrial-Robotic-Systems-FMAS-2025-6-2048.jpg)












![M. dos Santos, S. Hallé, F. Petrillo
Example
Program
function sum(a)
local t = 0
for i = 0, |a| - 1 do
t = t + a[i]
end
return t
end
P](https://crownmelresort.com/image.slidesharecdn.com/slides-251117132046-6e116935/75/Mutation-Testing-for-Industrial-Robotic-Systems-FMAS-2025-19-2048.jpg)
![M. dos Santos, S. Hallé, F. Petrillo
Example
Program
function sum(a)
local t = 0
for i = 0, |a| - 1 do
t = t + a[i]
end
return t
end
P
assert sum([0]) == 0
1
assert sum([2,0]) == 2
2
assert sum([]) == 0
3
Test cases](https://crownmelresort.com/image.slidesharecdn.com/slides-251117132046-6e116935/75/Mutation-Testing-for-Industrial-Robotic-Systems-FMAS-2025-20-2048.jpg)
![M. dos Santos, S. Hallé, F. Petrillo
Example
Program
function sum(a)
local t = 0
for i = 0, |a| - 1 do
t = t + a[i]
end
return t
end
P
assert sum([0]) == 0
1
assert sum([2,0]) == 2
2
assert sum([]) == 0
3
Test cases](https://crownmelresort.com/image.slidesharecdn.com/slides-251117132046-6e116935/75/Mutation-Testing-for-Industrial-Robotic-Systems-FMAS-2025-21-2048.jpg)
![M. dos Santos, S. Hallé, F. Petrillo
Example
Program
function sum(a)
local t = 0
for i = 0, |a| - 1 do
t = t + a[i]
end
return t
end
P
assert sum([0]) == 0
1
assert sum([2,0]) == 2
2
assert sum([]) == 0
3
Test cases
Mutant A
function sum(a)
local t = 1
for i = 0, |a| - 1 do
t = t + a[i]
end
return t
end
M](https://crownmelresort.com/image.slidesharecdn.com/slides-251117132046-6e116935/75/Mutation-Testing-for-Industrial-Robotic-Systems-FMAS-2025-22-2048.jpg)
![M. dos Santos, S. Hallé, F. Petrillo
Example
Program
function sum(a)
local t = 0
for i = 0, |a| - 1 do
t = t + a[i]
end
return t
end
P
assert sum([0]) == 0
1
assert sum([2,0]) == 2
2
assert sum([]) == 0
3
Test cases
Mutant A
function sum(a)
local t = 1
for i = 0, |a| - 1 do
t = t + a[i]
end
return t
end
M](https://crownmelresort.com/image.slidesharecdn.com/slides-251117132046-6e116935/75/Mutation-Testing-for-Industrial-Robotic-Systems-FMAS-2025-23-2048.jpg)
![M. dos Santos, S. Hallé, F. Petrillo
Example
Program
function sum(a)
local t = 0
for i = 0, |a| - 1 do
t = t + a[i]
end
return t
end
P
assert sum([0]) == 0
1
assert sum([2,0]) == 2
2
assert sum([]) == 0
3
Test cases
Mutant A
function sum(a)
local t = 1
for i = 0, |a| - 1 do
t = t + a[i]
end
return t
end
M
Mutant B
function sum(a)
local t = 0
for i = 0, |a| - 2 do
t = t + a[i]
end
return t
end
M](https://crownmelresort.com/image.slidesharecdn.com/slides-251117132046-6e116935/75/Mutation-Testing-for-Industrial-Robotic-Systems-FMAS-2025-24-2048.jpg)
![M. dos Santos, S. Hallé, F. Petrillo
Example
Program
function sum(a)
local t = 0
for i = 0, |a| - 1 do
t = t + a[i]
end
return t
end
P
assert sum([0]) == 0
1
assert sum([2,0]) == 2
2
assert sum([]) == 0
3
Test cases
Mutant A
function sum(a)
local t = 1
for i = 0, |a| - 1 do
t = t + a[i]
end
return t
end
M
Mutant B
function sum(a)
local t = 0
for i = 0, |a| - 2 do
t = t + a[i]
end
return t
end
M](https://crownmelresort.com/image.slidesharecdn.com/slides-251117132046-6e116935/75/Mutation-Testing-for-Industrial-Robotic-Systems-FMAS-2025-25-2048.jpg)































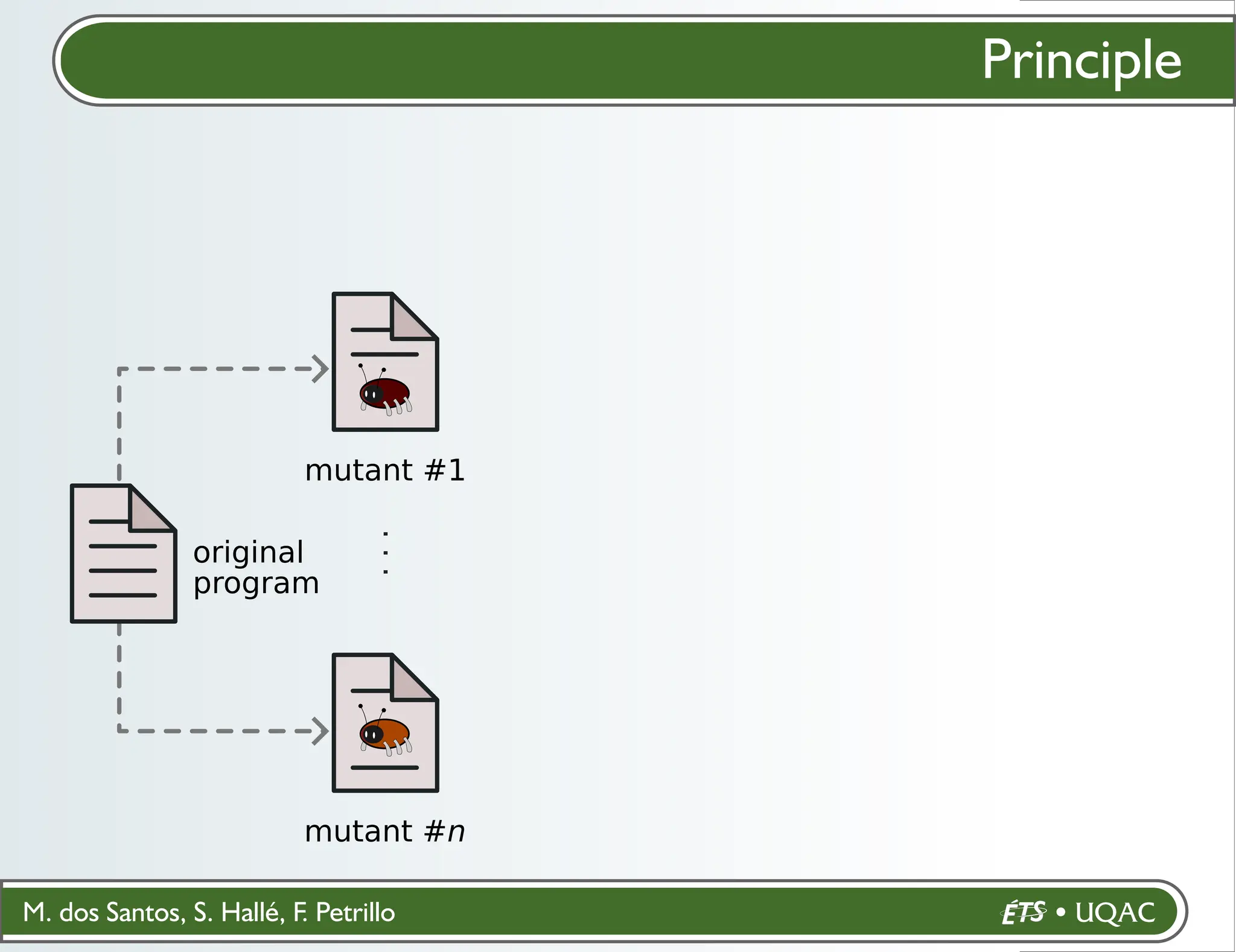
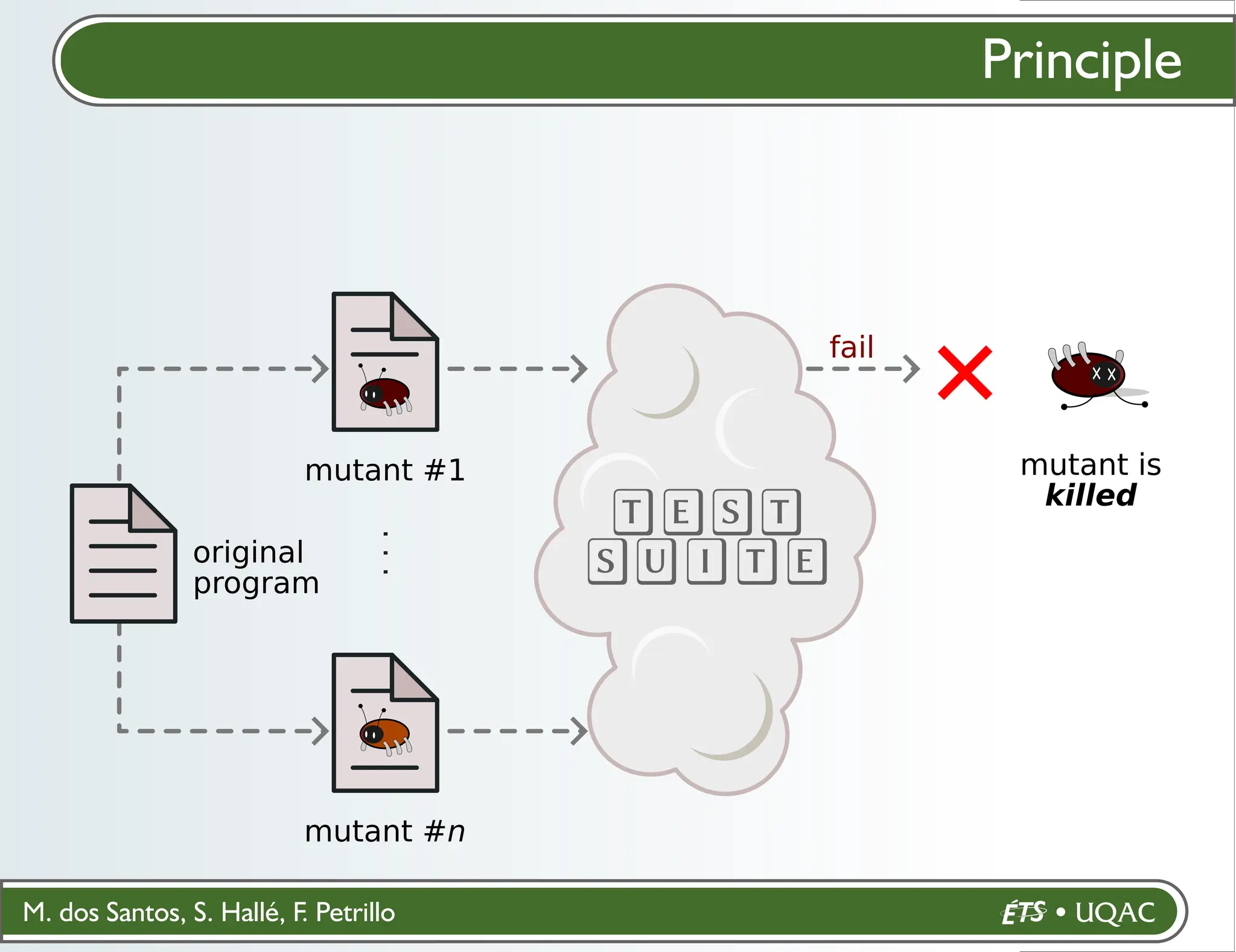
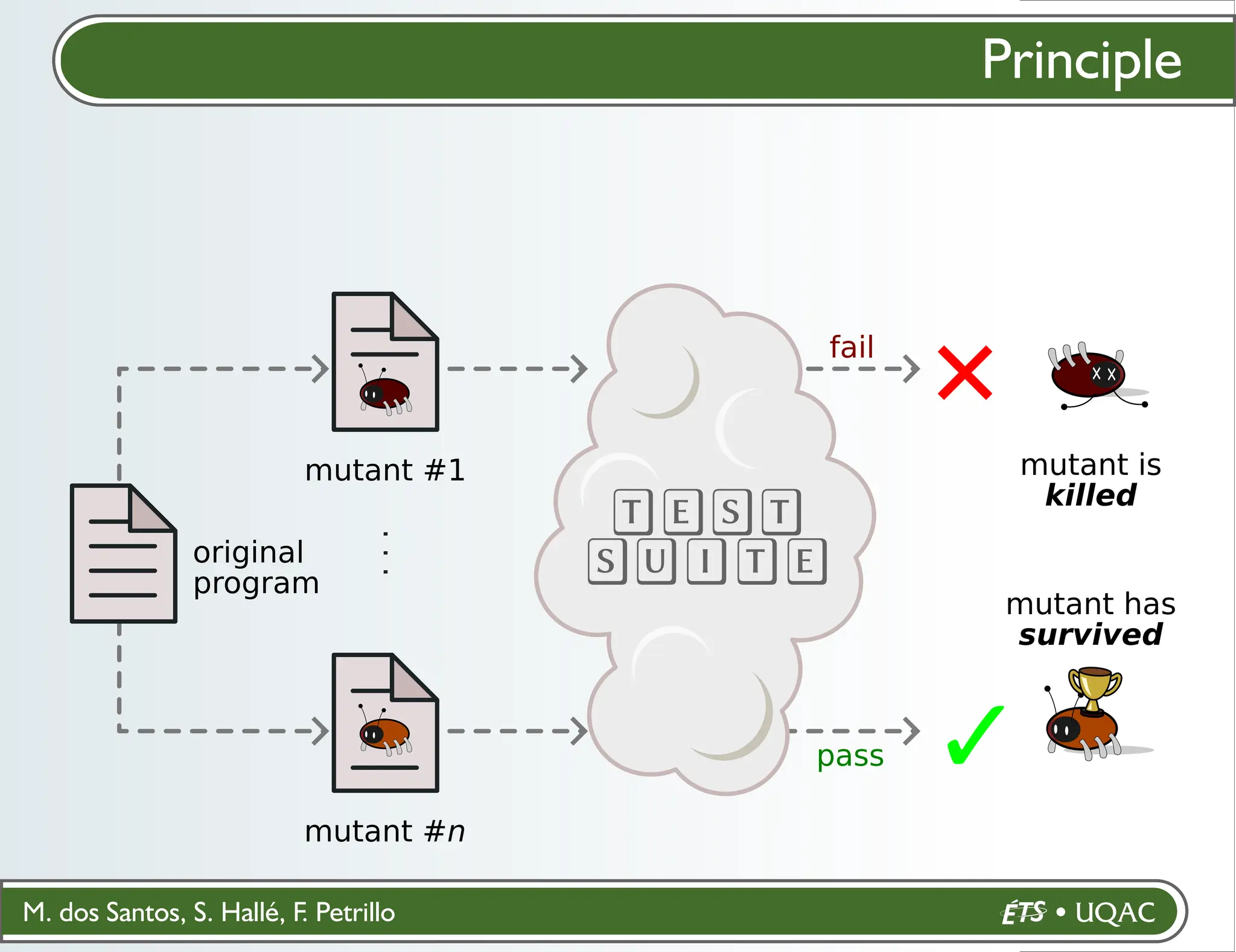
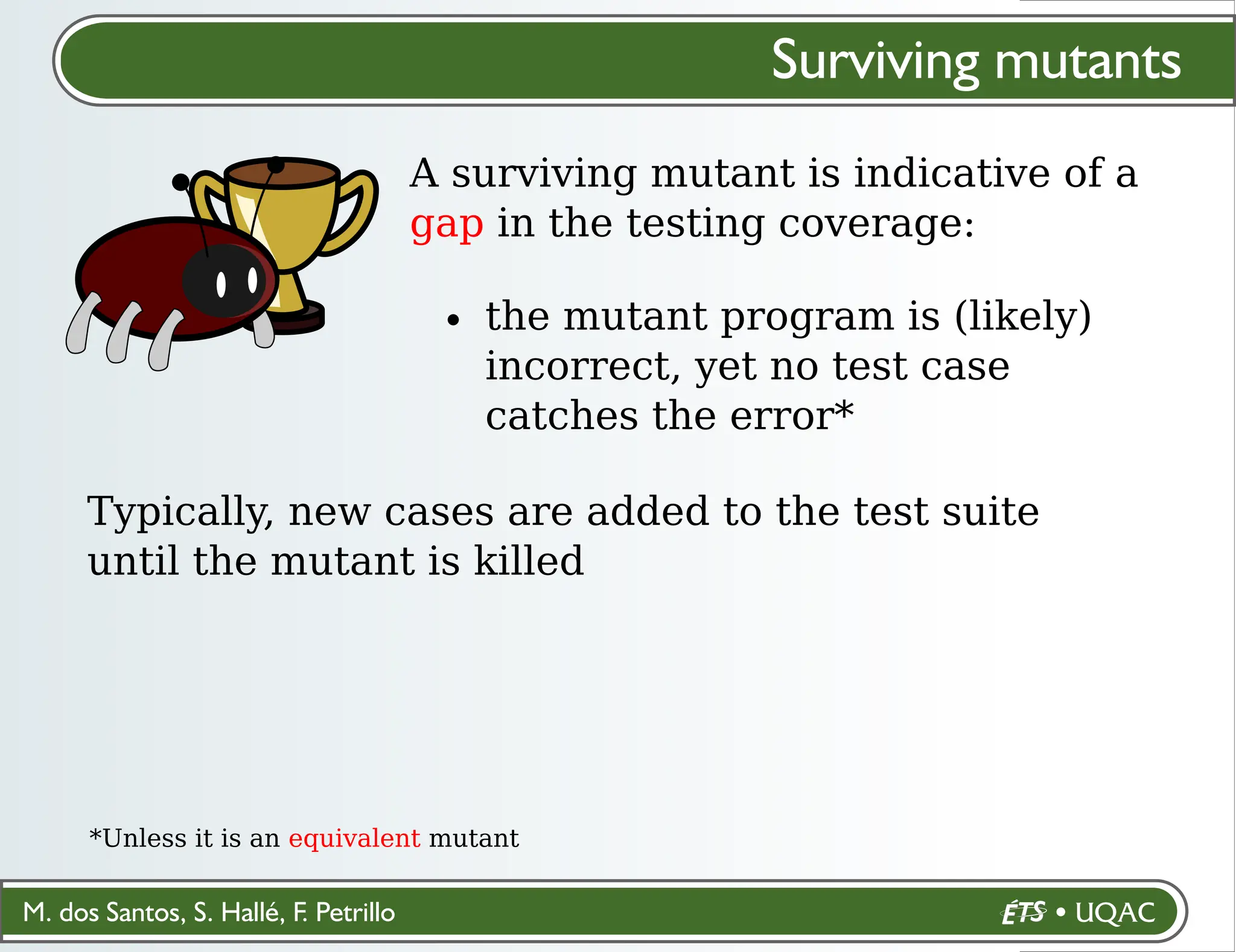
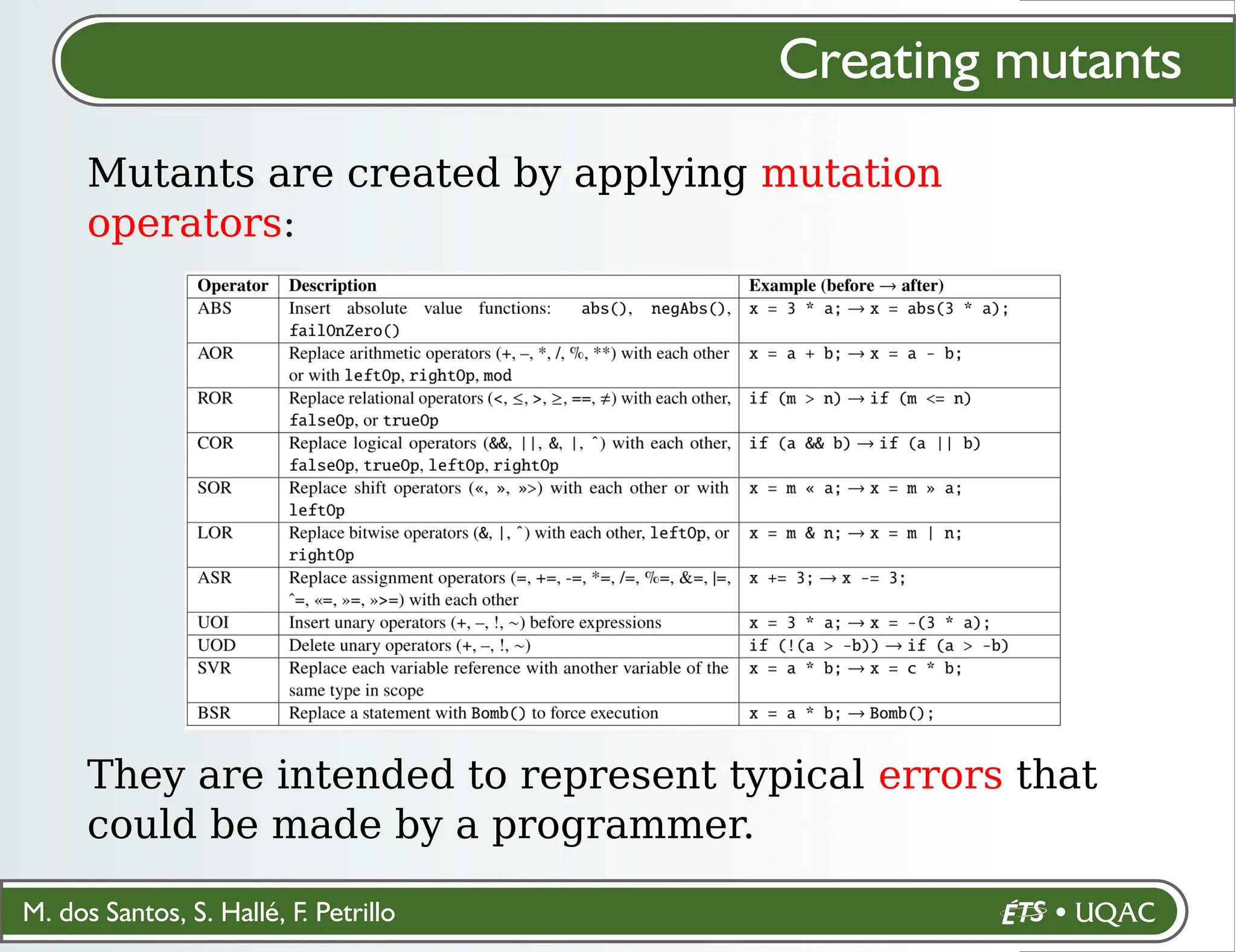
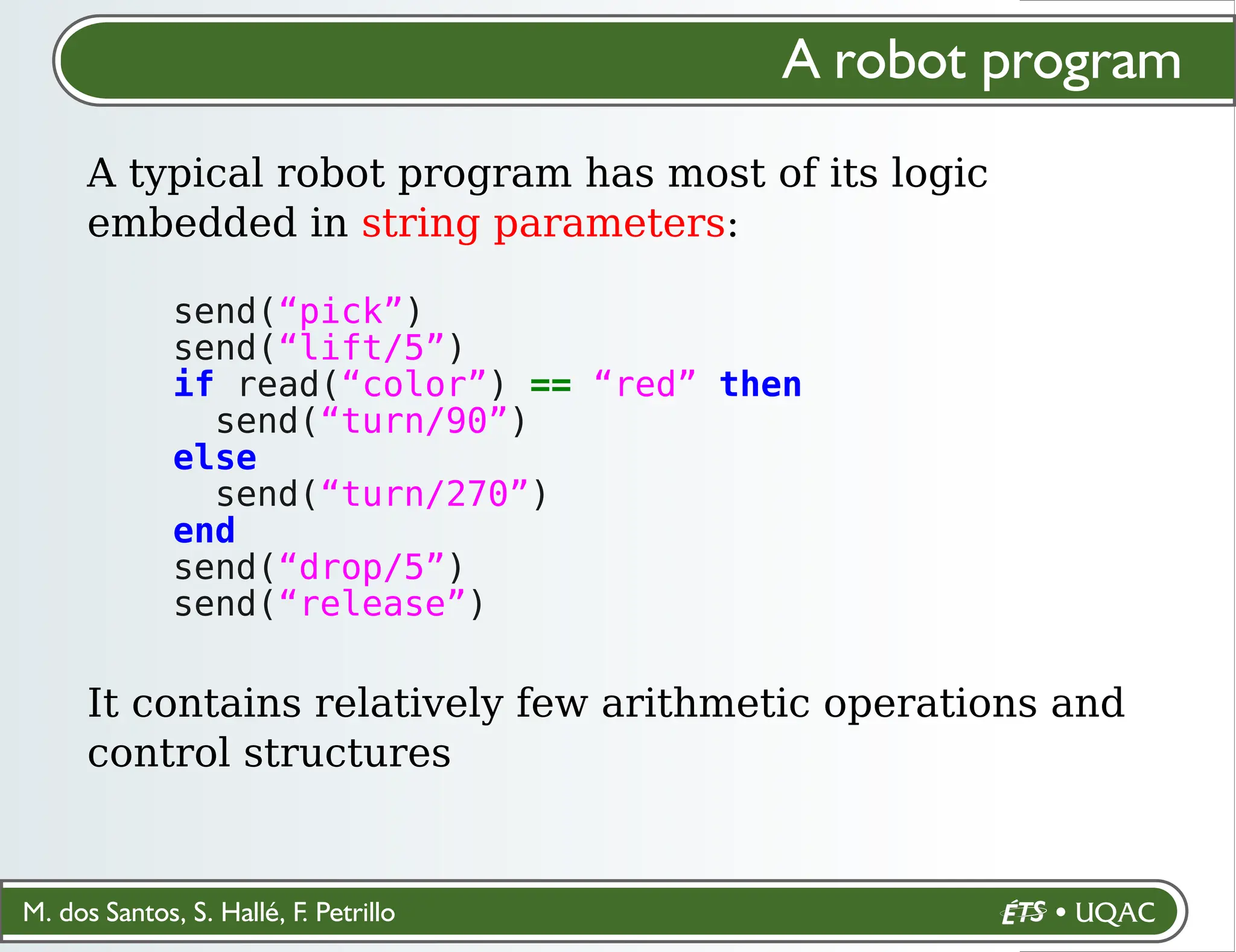
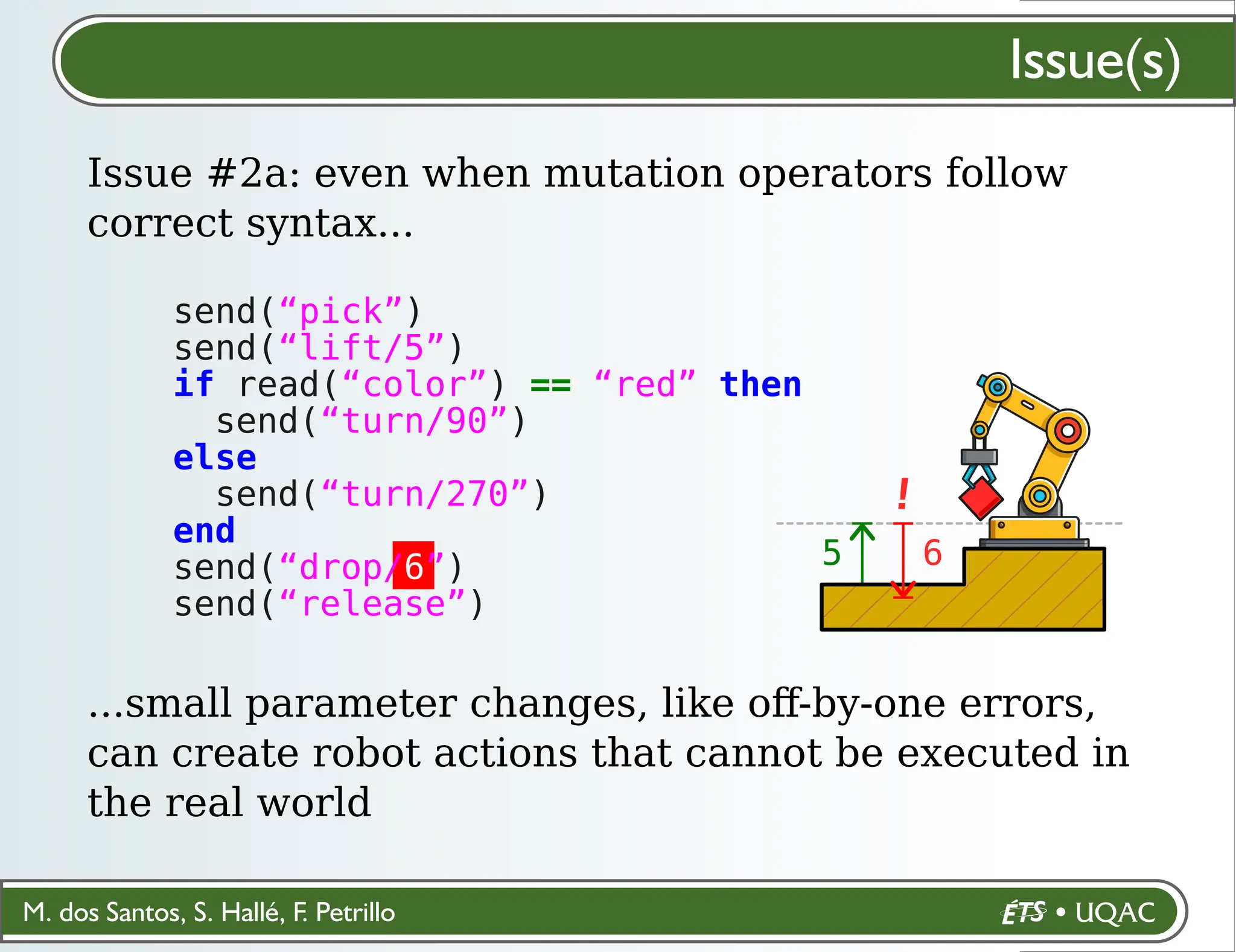
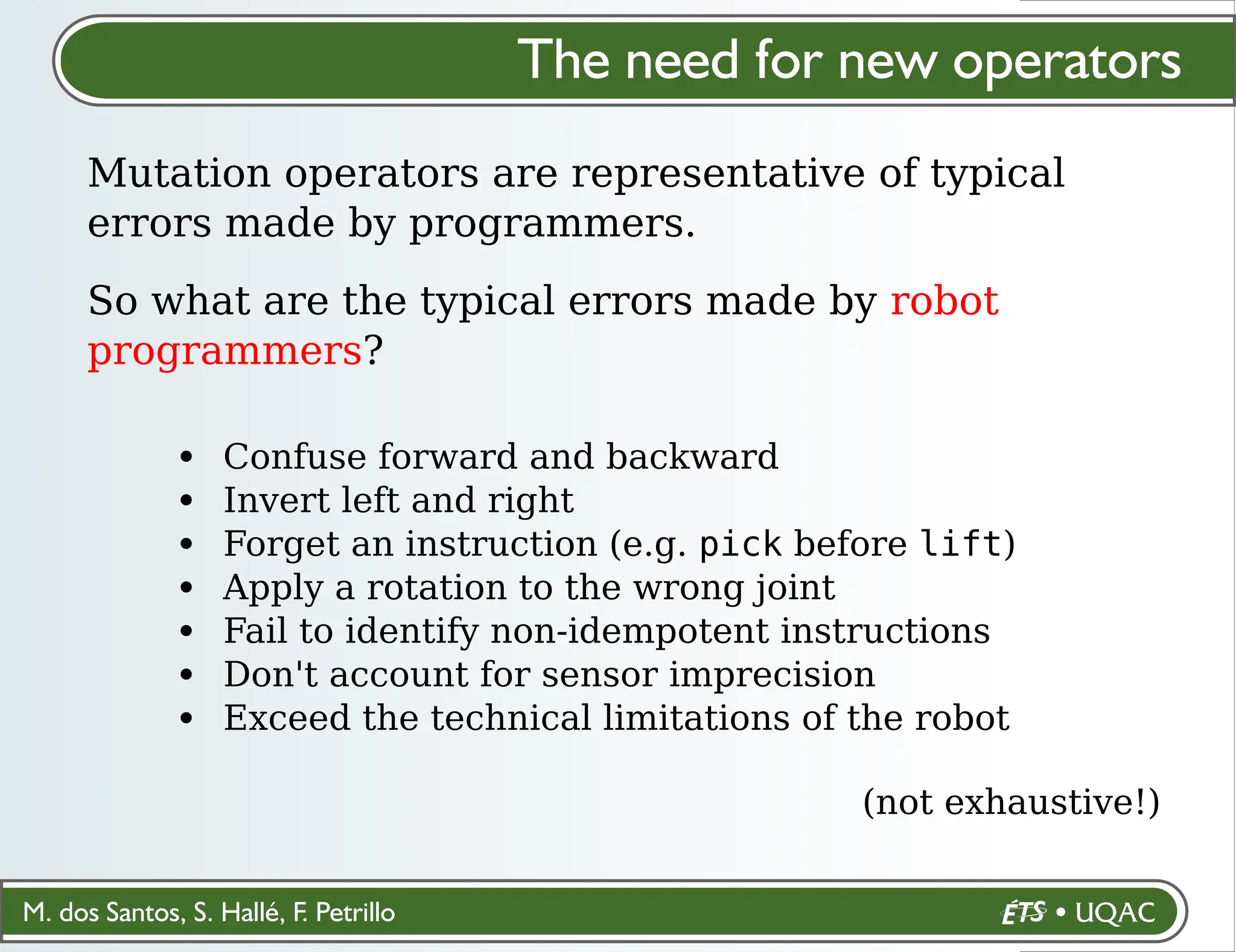
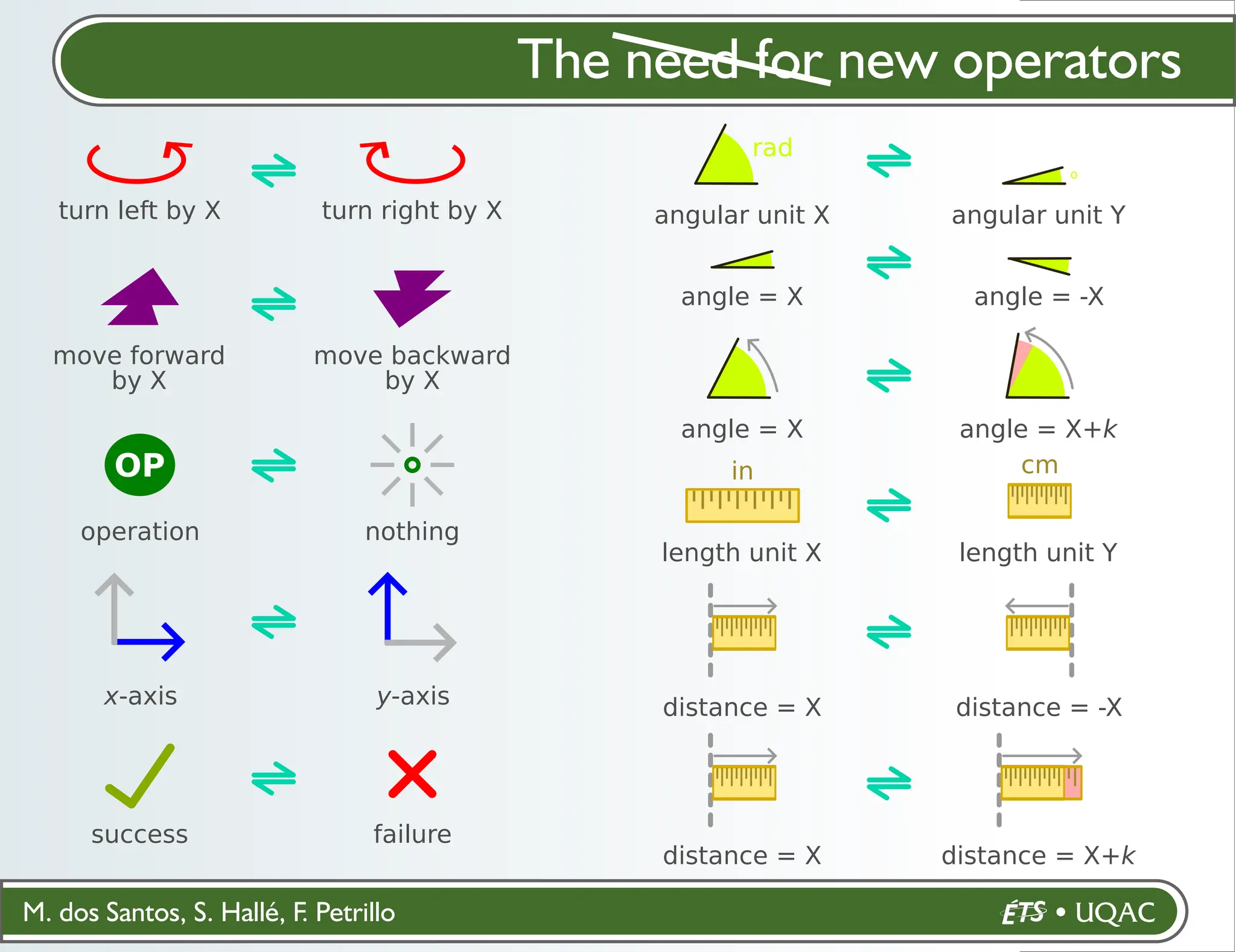
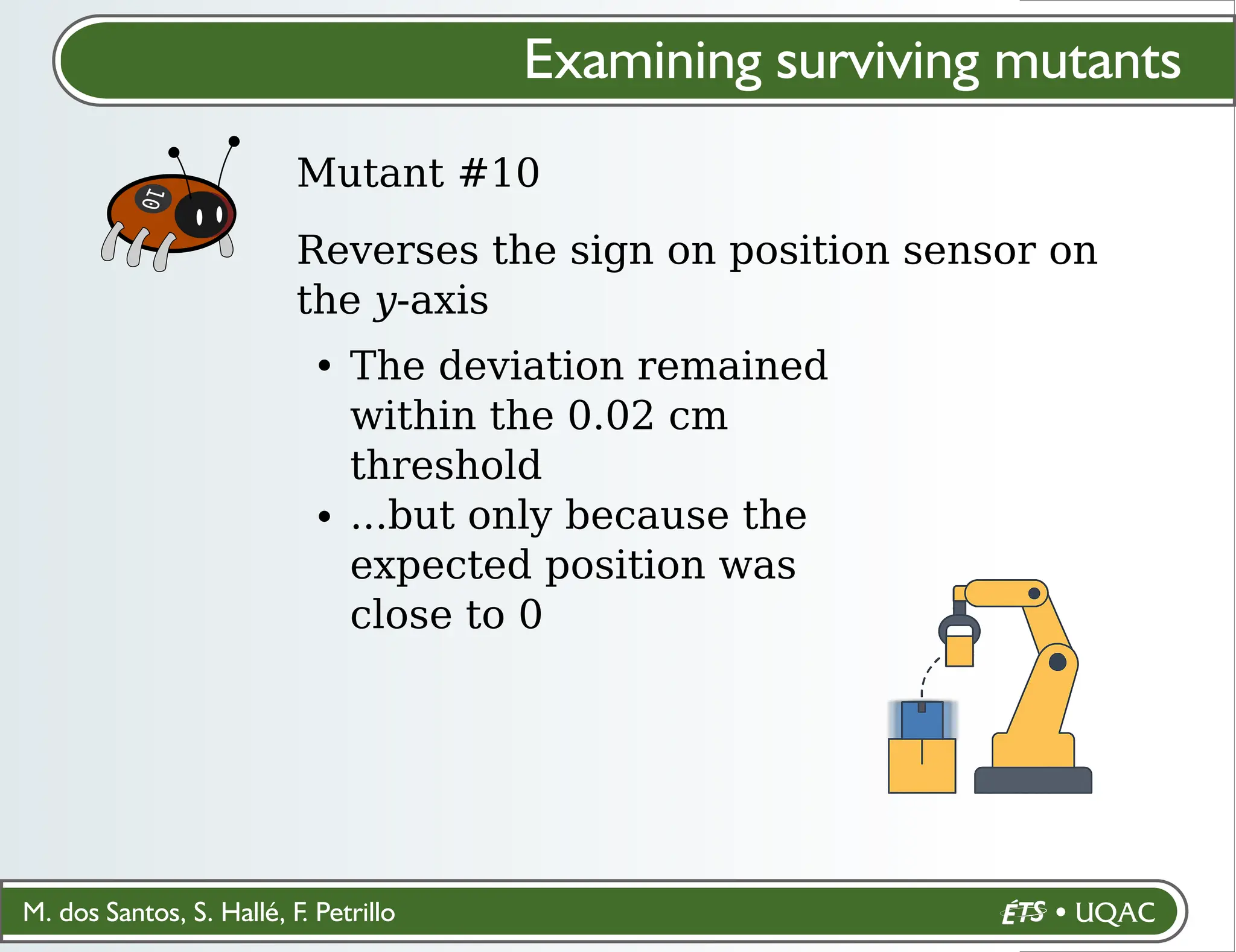
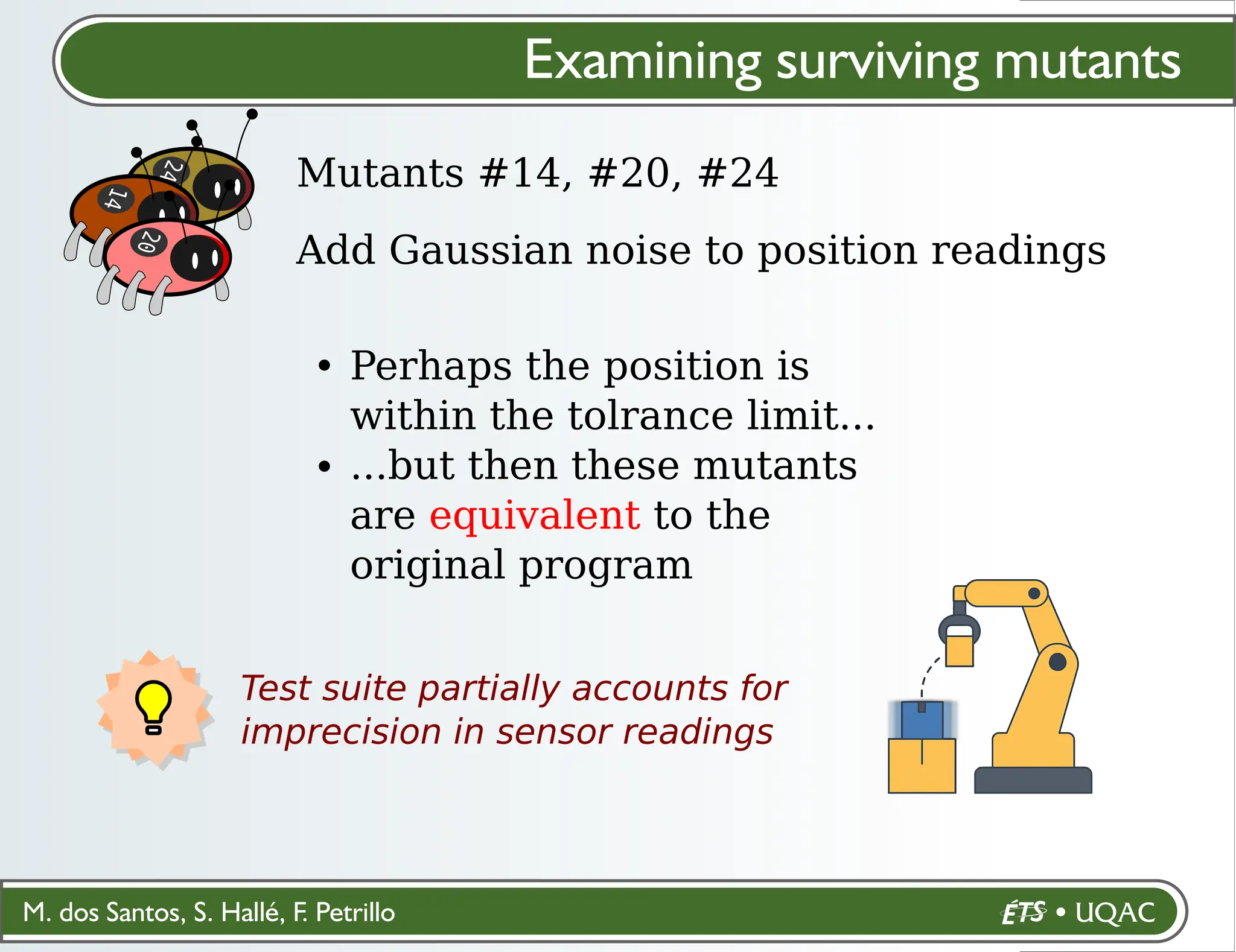
Slides of a talk at the Seventh International Workshop on Formal Methods for Autonomous Systems. Industrial robotic systems (IRS) are increasingly deployed in diverse environments, where failures can result in severe accidents and costly downtime. Ensuring the reliability of the software controlling these systems is therefore critical. Mutation testing, a technique widely used in software engineering, evaluates the effectiveness of test suites by introducing small faults, or mutants, into the code. However, traditional mutation operators are poorly suited to robotic programs, which involve message-based commands and interactions with the physical world. This paper explores the adaptation of mutation testing to IRS by defining domain-specific mutation operators that capture the semantics of robot actions and sensor readings. We propose a methodology for generating meaningful mutants at the level of high-level read and write operations, including movement, gripper actions, and sensor noise injection. An empirical study on a pick-and-place scenario demonstrates that our approach produces more informative mutants and reduces the number of invalid or equivalent cases compared to conventional operators. Results highlight the potential of mutation testing to enhance test suite quality and contribute to safer, more reliable industrial robotic systems.