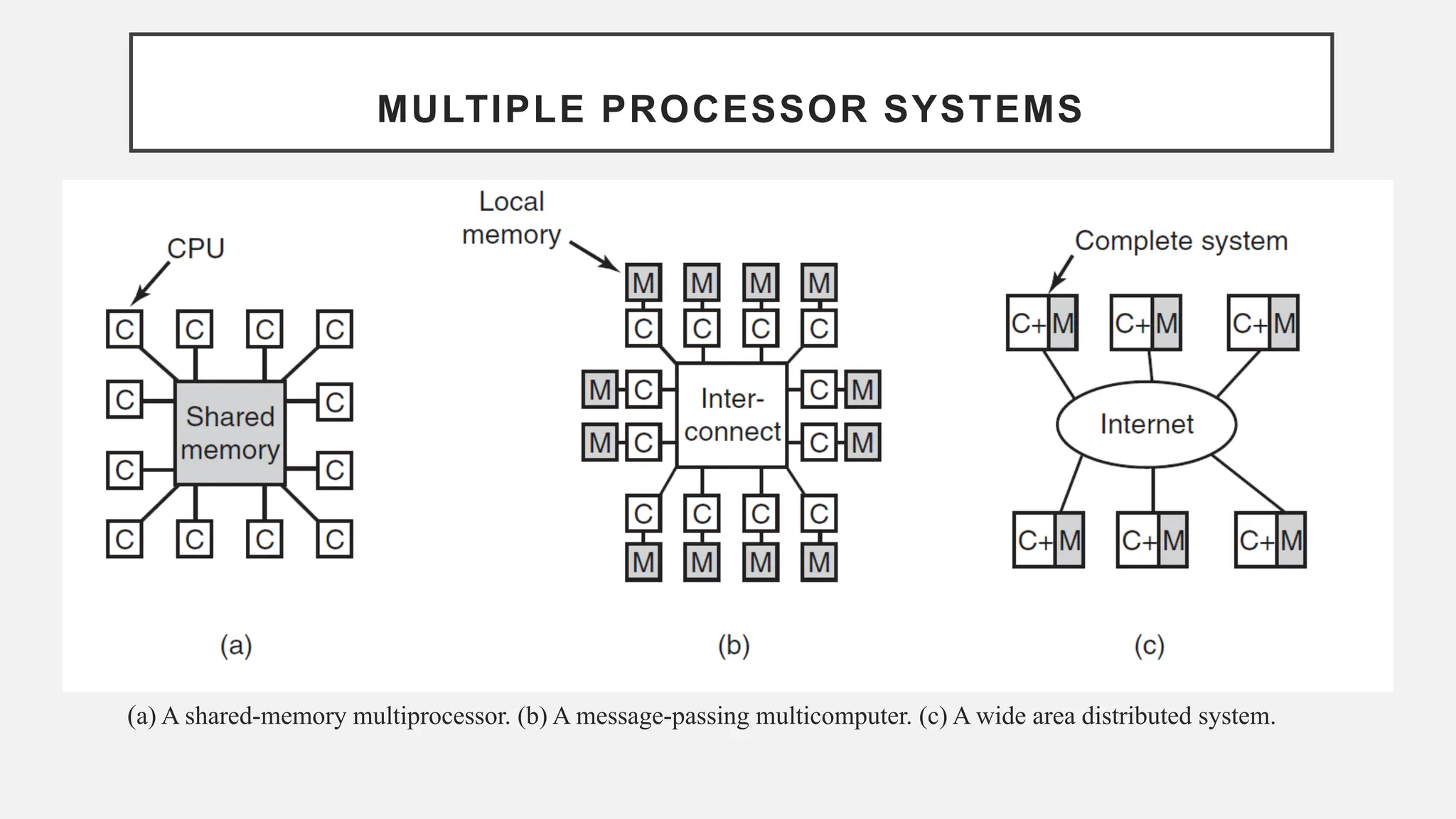
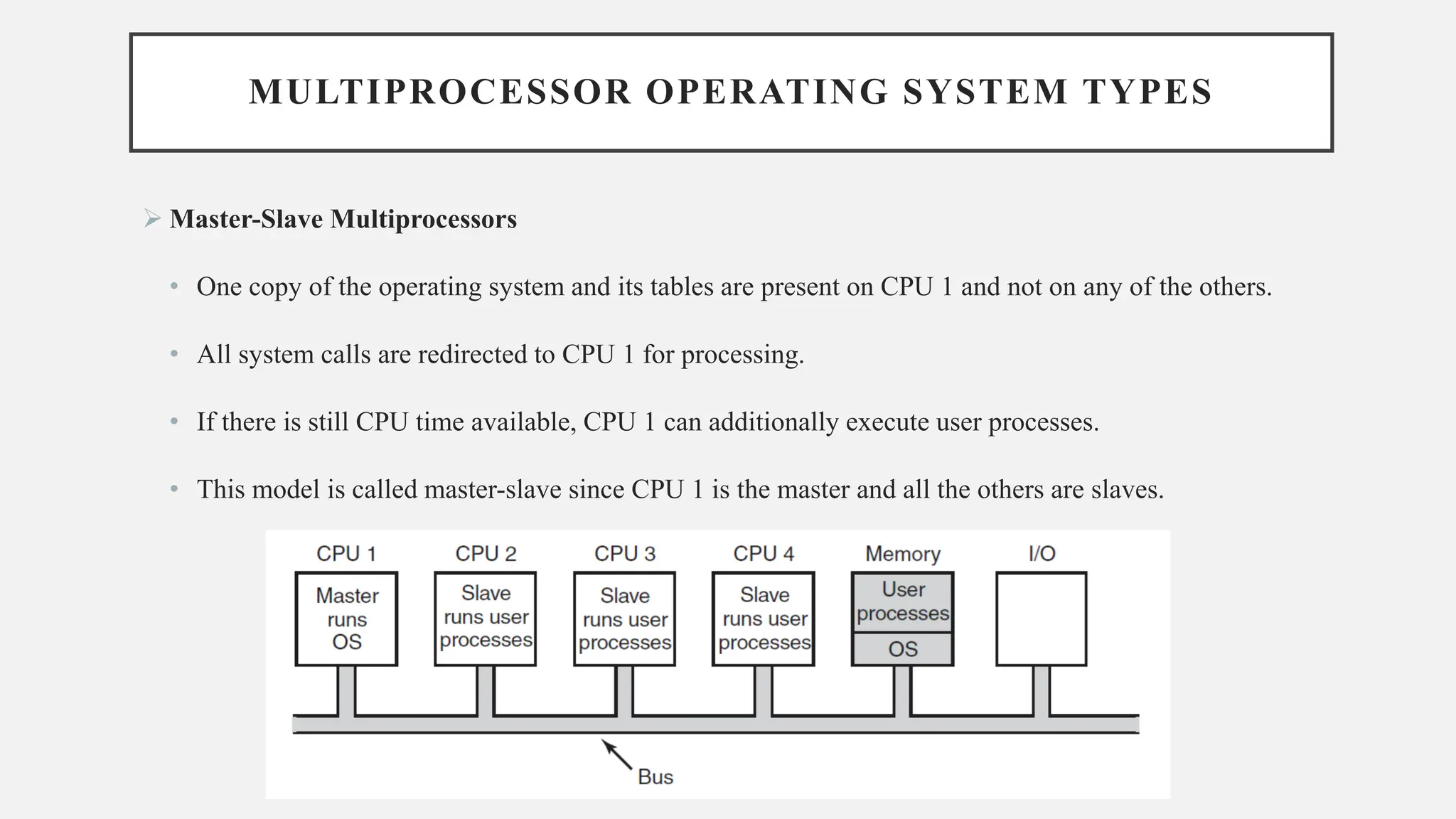
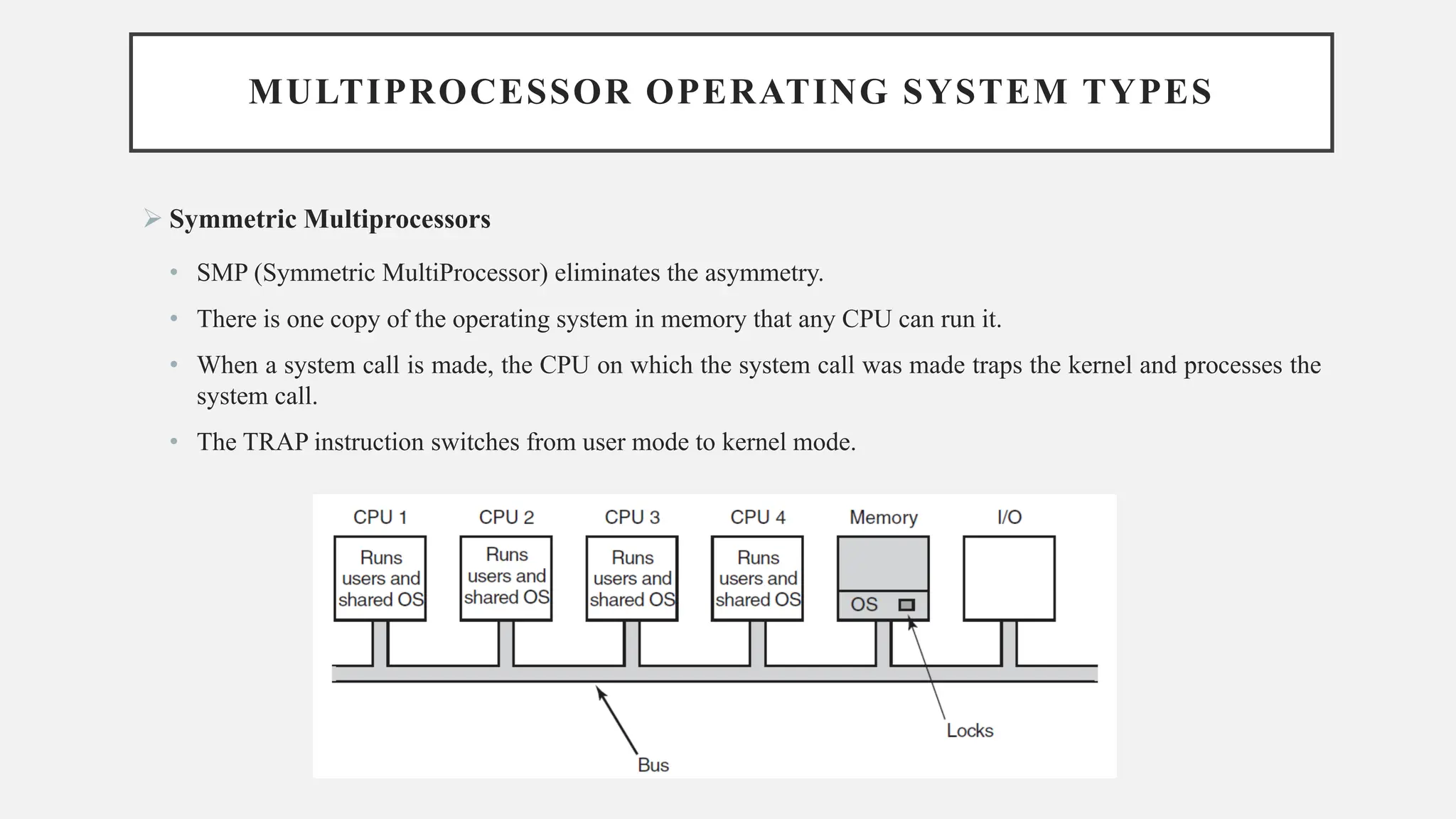
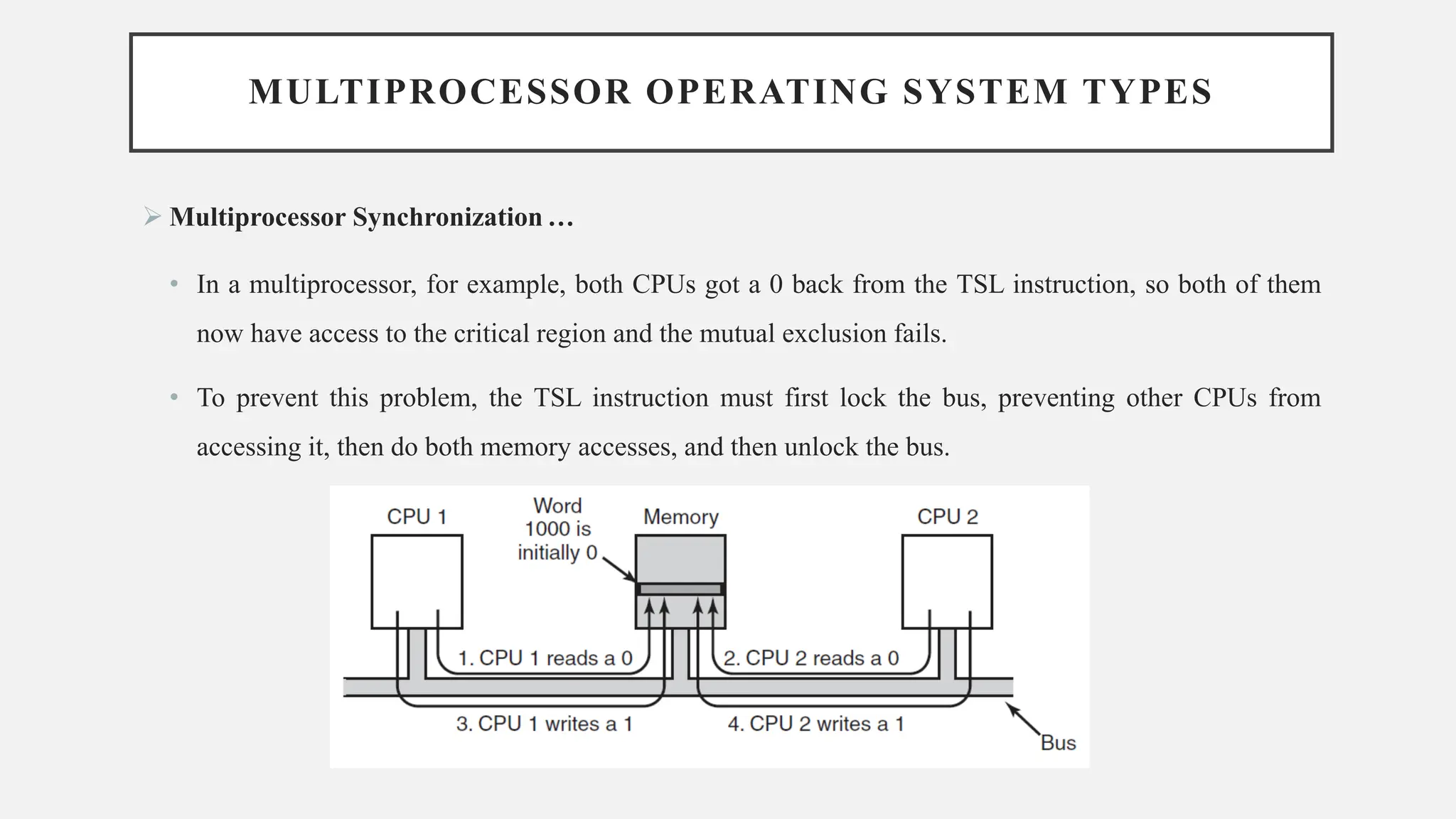
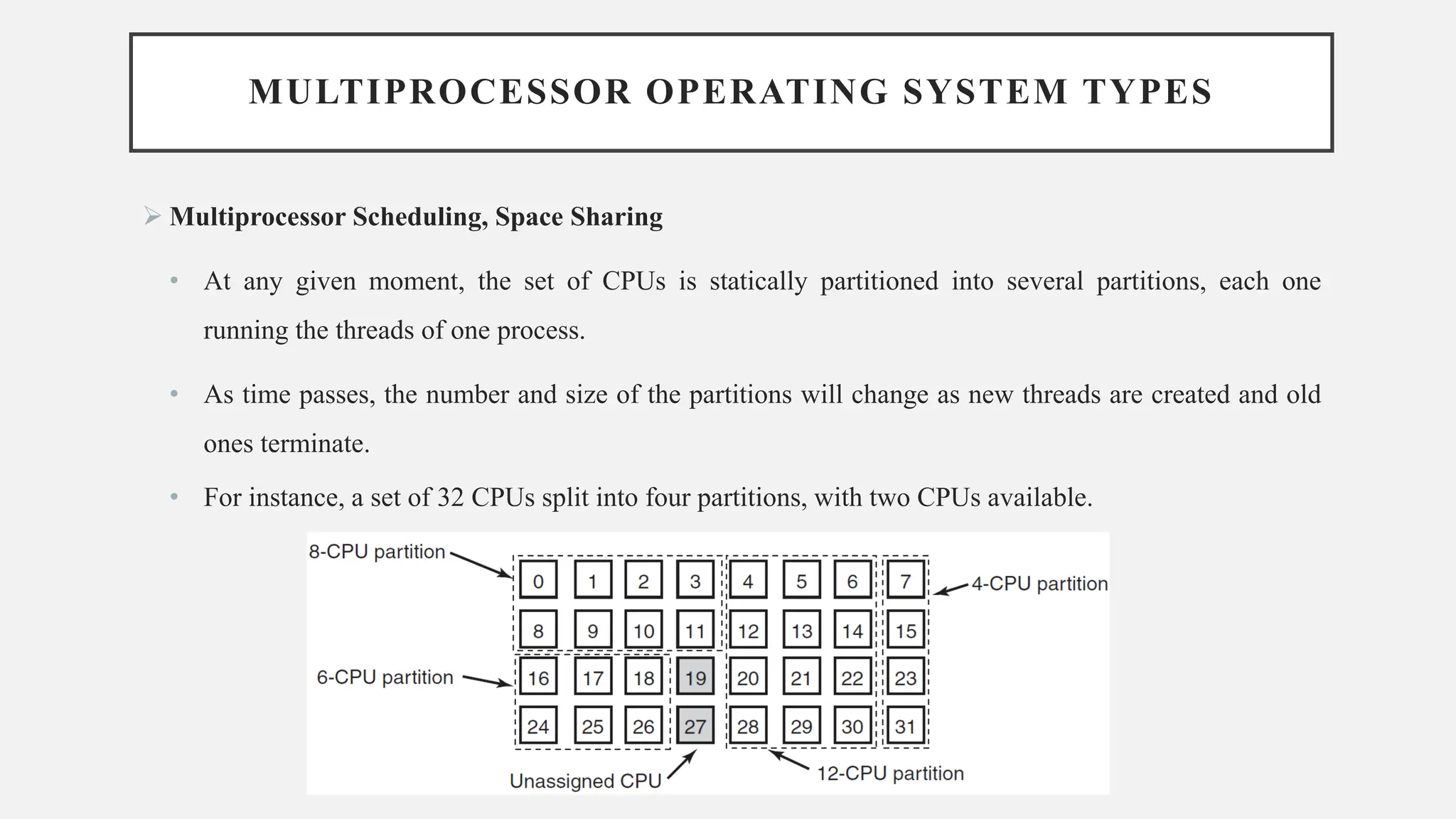
The document discusses the design of operating systems for new computer architectures, emphasizing the need for increased computing power due to limitations in clock speed and heat production. It examines various multiprocessor systems, such as shared-memory multiprocessors and message-passing multicomputers, detailing their architectures, communication methods, and the challenge of synchronization. It also explores different multiprocessor operating system types, including master-slave and symmetric multiprocessors, and addresses the importance of mutex protocols for ensuring mutual exclusion in multiprocessor environments.