Download to read offline
![The discrete gradient
How can we differentiate a digital image f[x,y]?
• Option 1: reconstruct a continuous image, then take gradient
• Option 2: take discrete derivative (finite difference)
How would you implement this as a cross-correlation?](https://image.slidesharecdn.com/edgedetection-240820040753-a6d08aad/75/EDGEDETECTION-algorithm-and-theory-for-image-processing-10-2048.jpg)











![The discrete gradient
How can we differentiate a digital image f[x,y]?
• Option 1: reconstruct a continuous image, then take gradient
• Option 2: take discrete derivative (finite difference)
How would you implement this as a cross-correlation?](https://crownmelresort.com/image.slidesharecdn.com/edgedetection-240820040753-a6d08aad/75/EDGEDETECTION-algorithm-and-theory-for-image-processing-10-2048.jpg)



































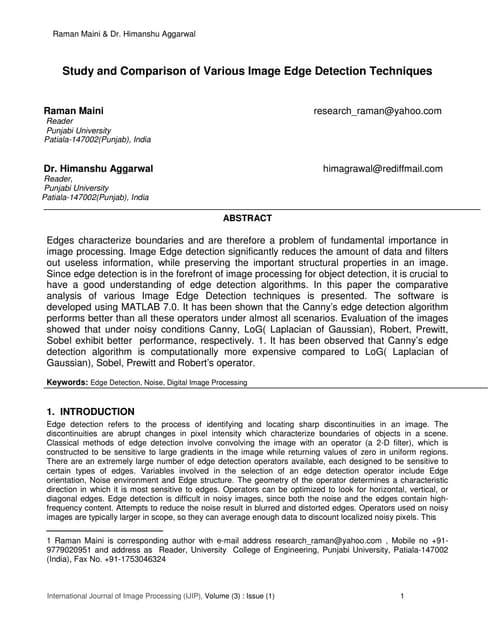
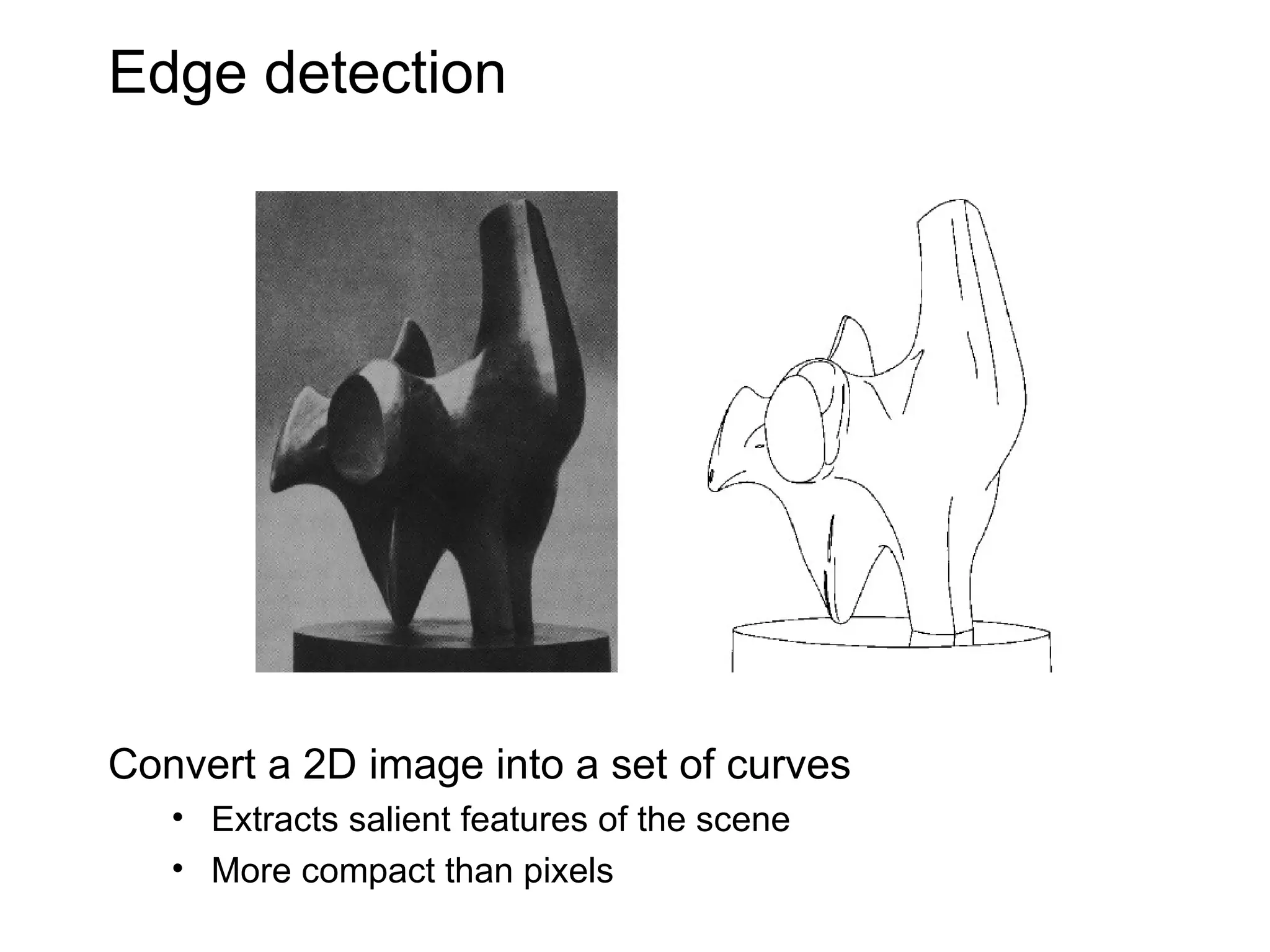
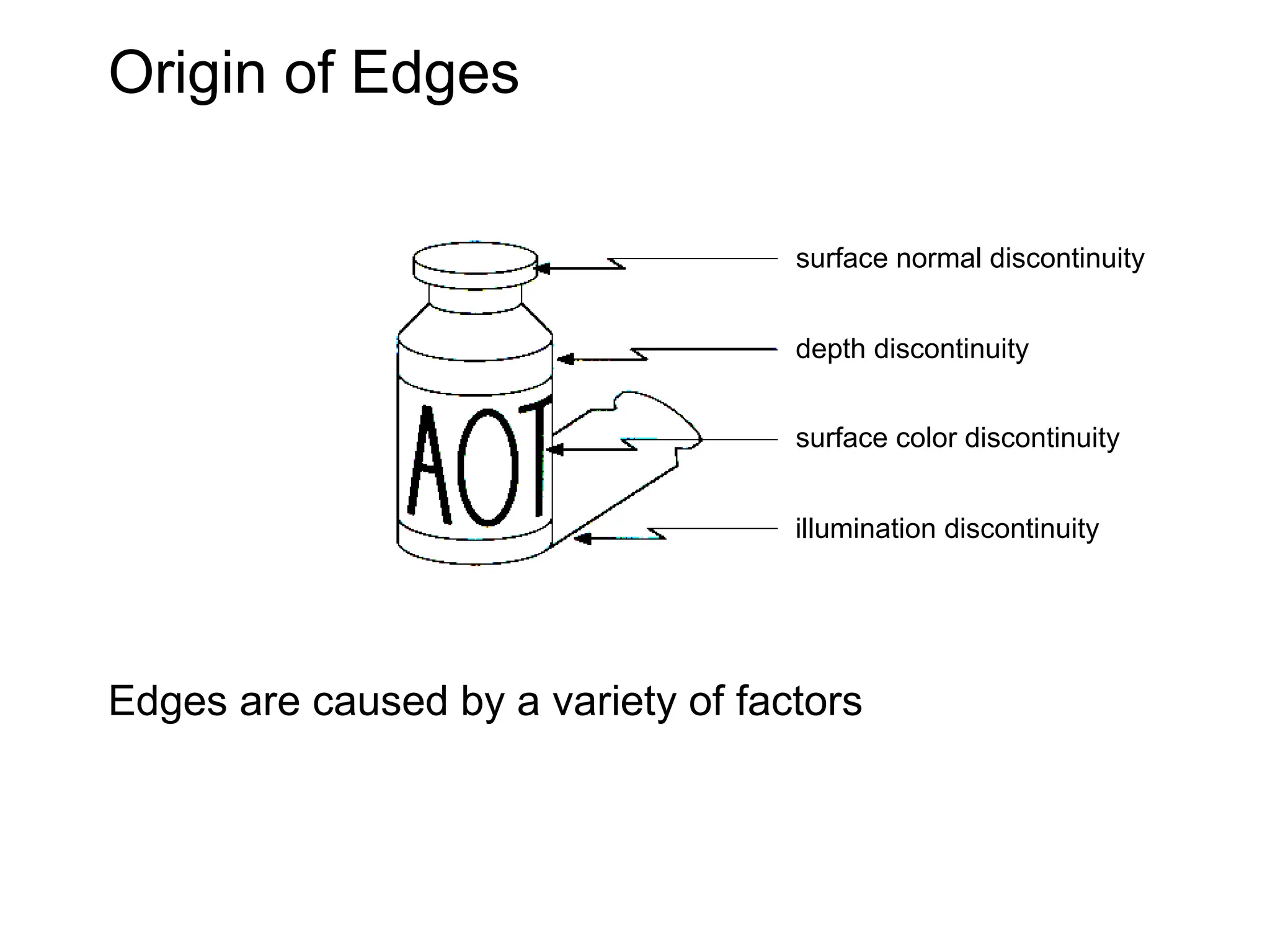
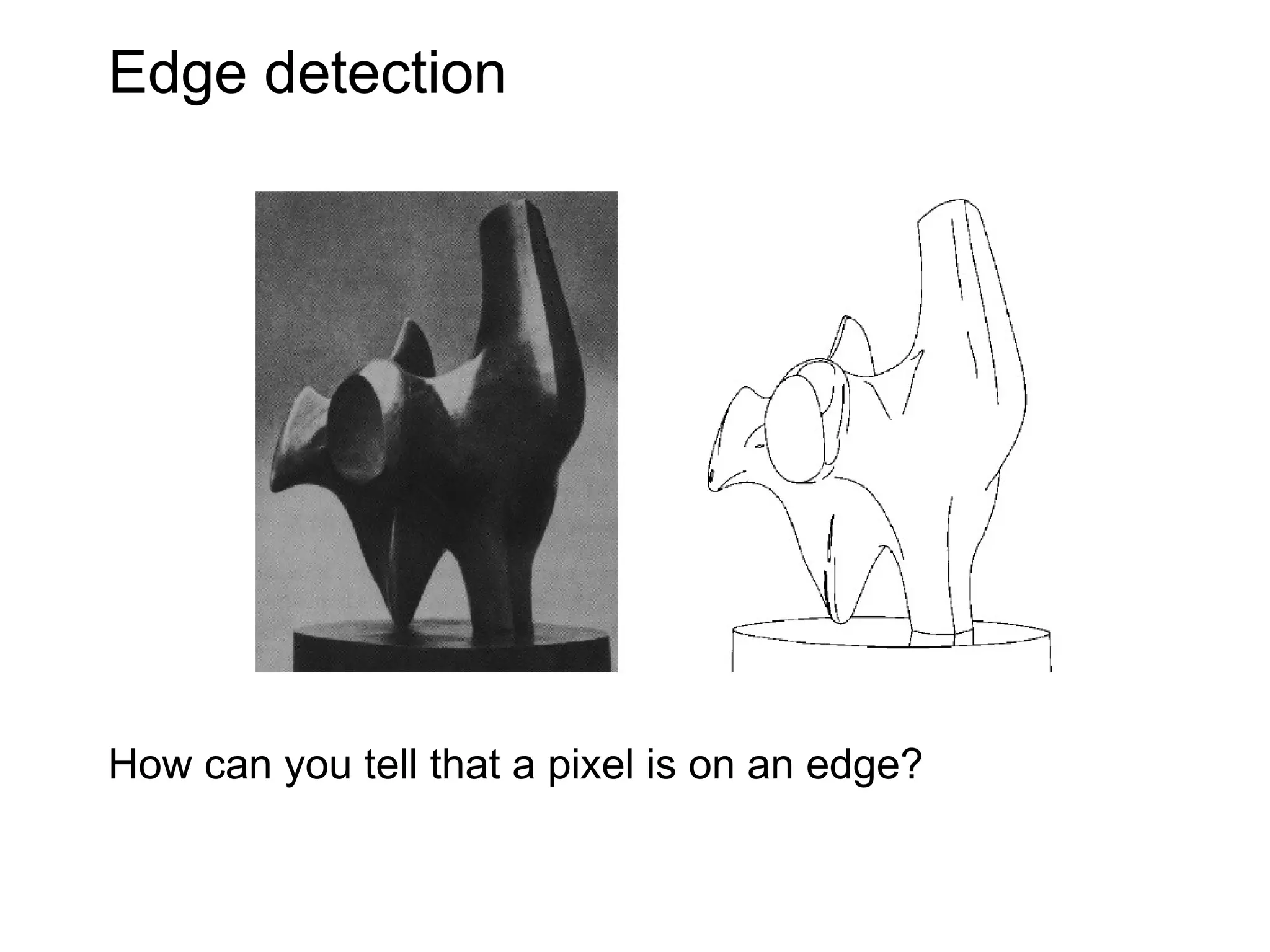
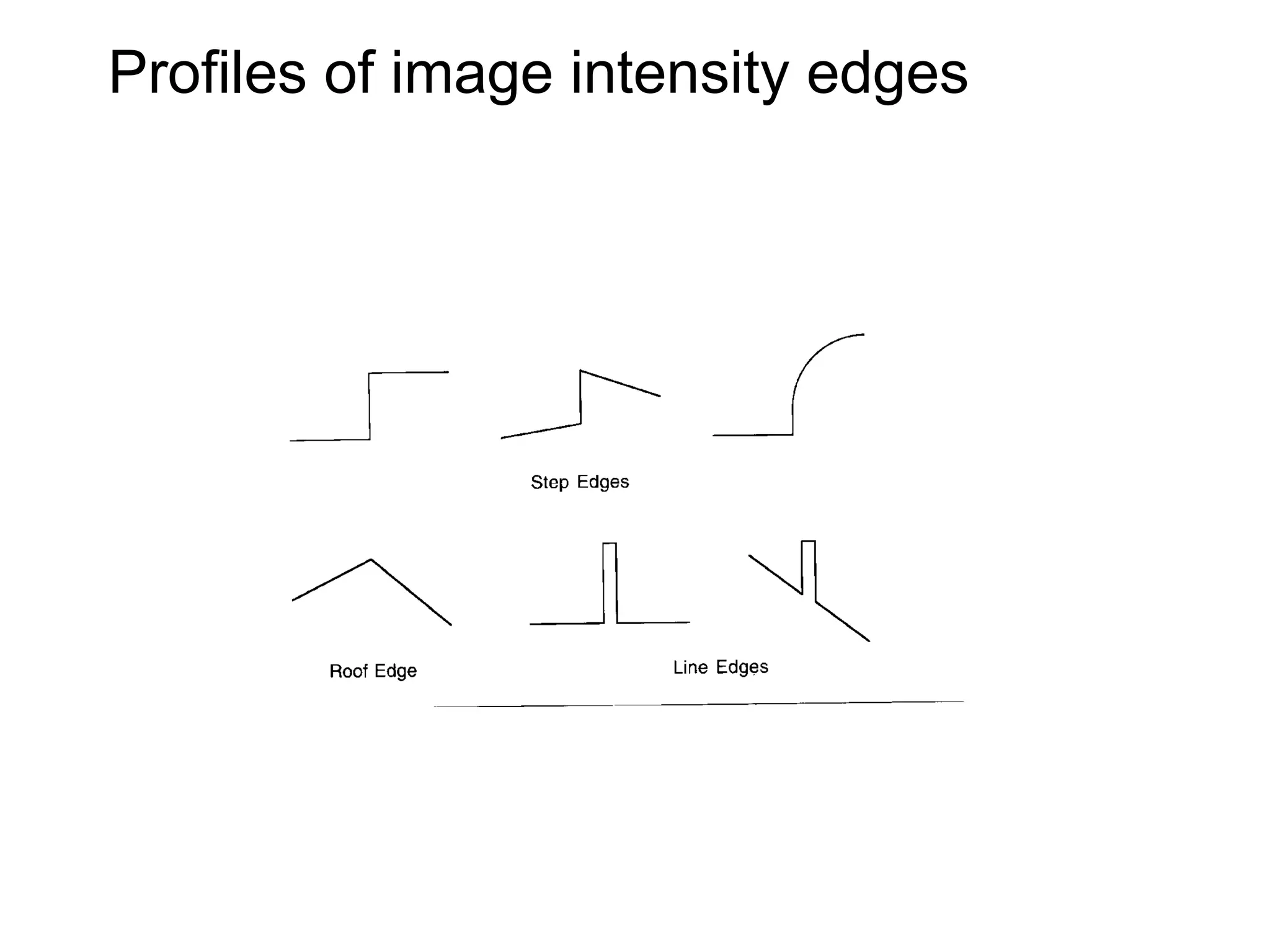
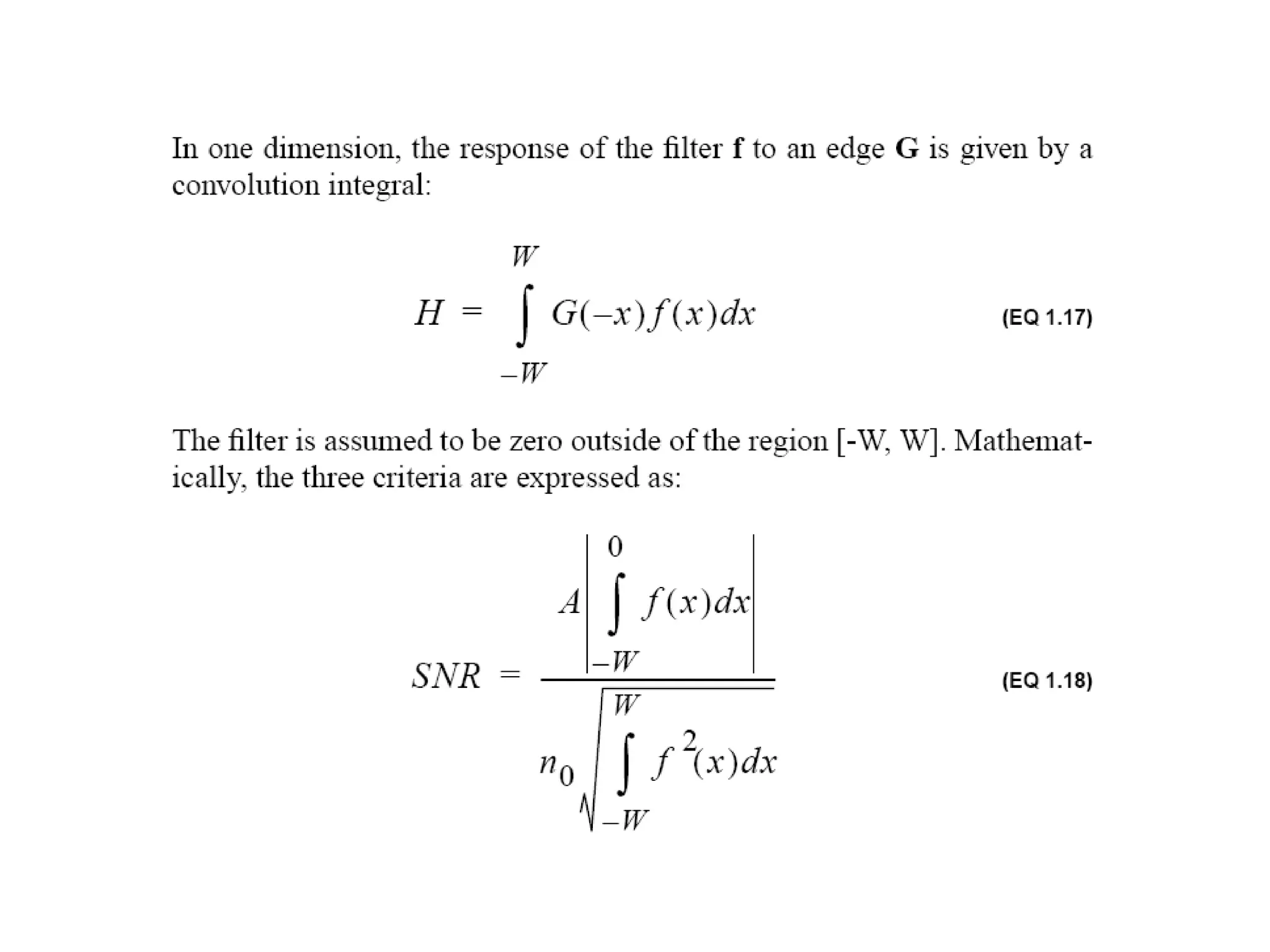
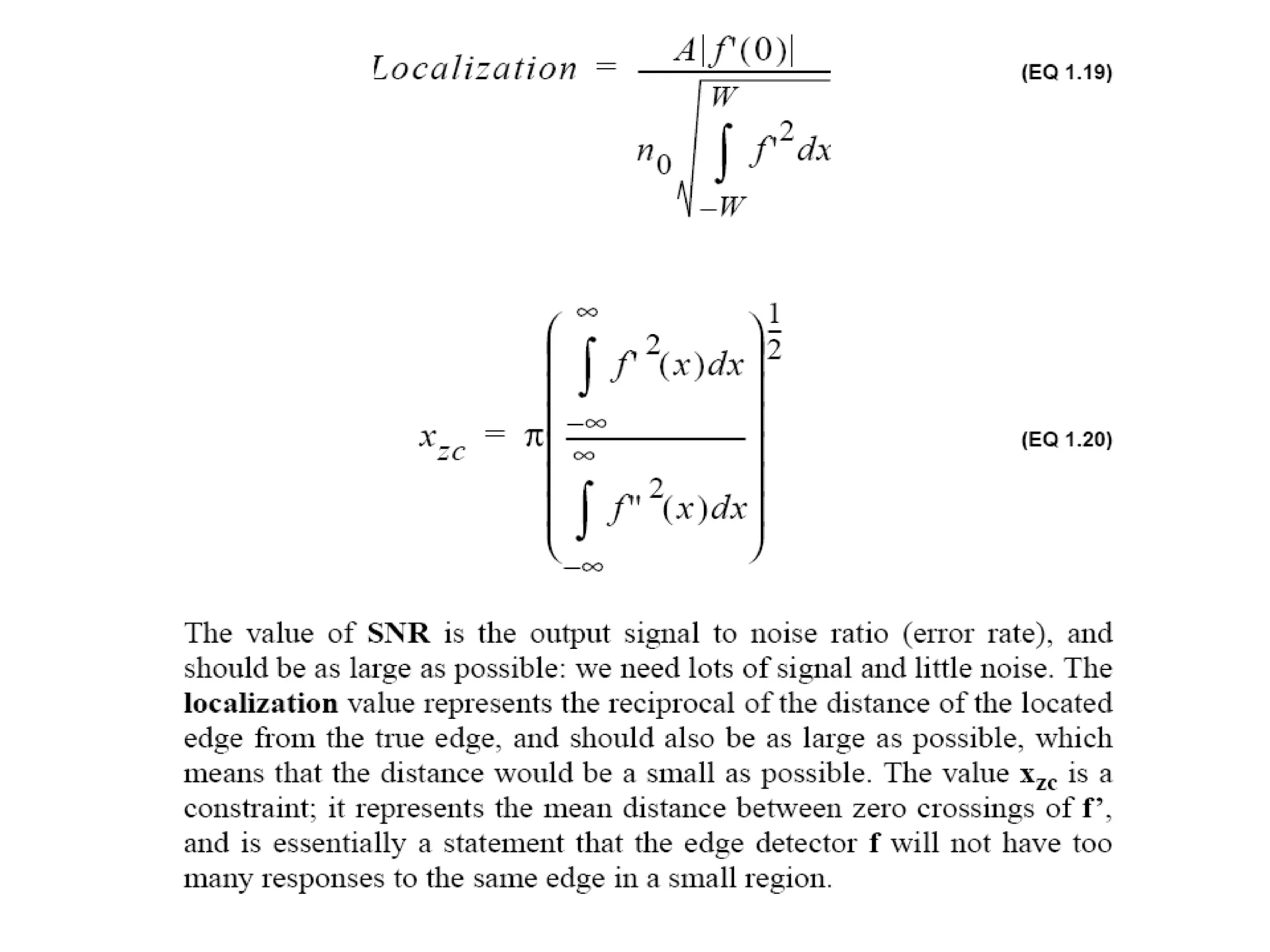
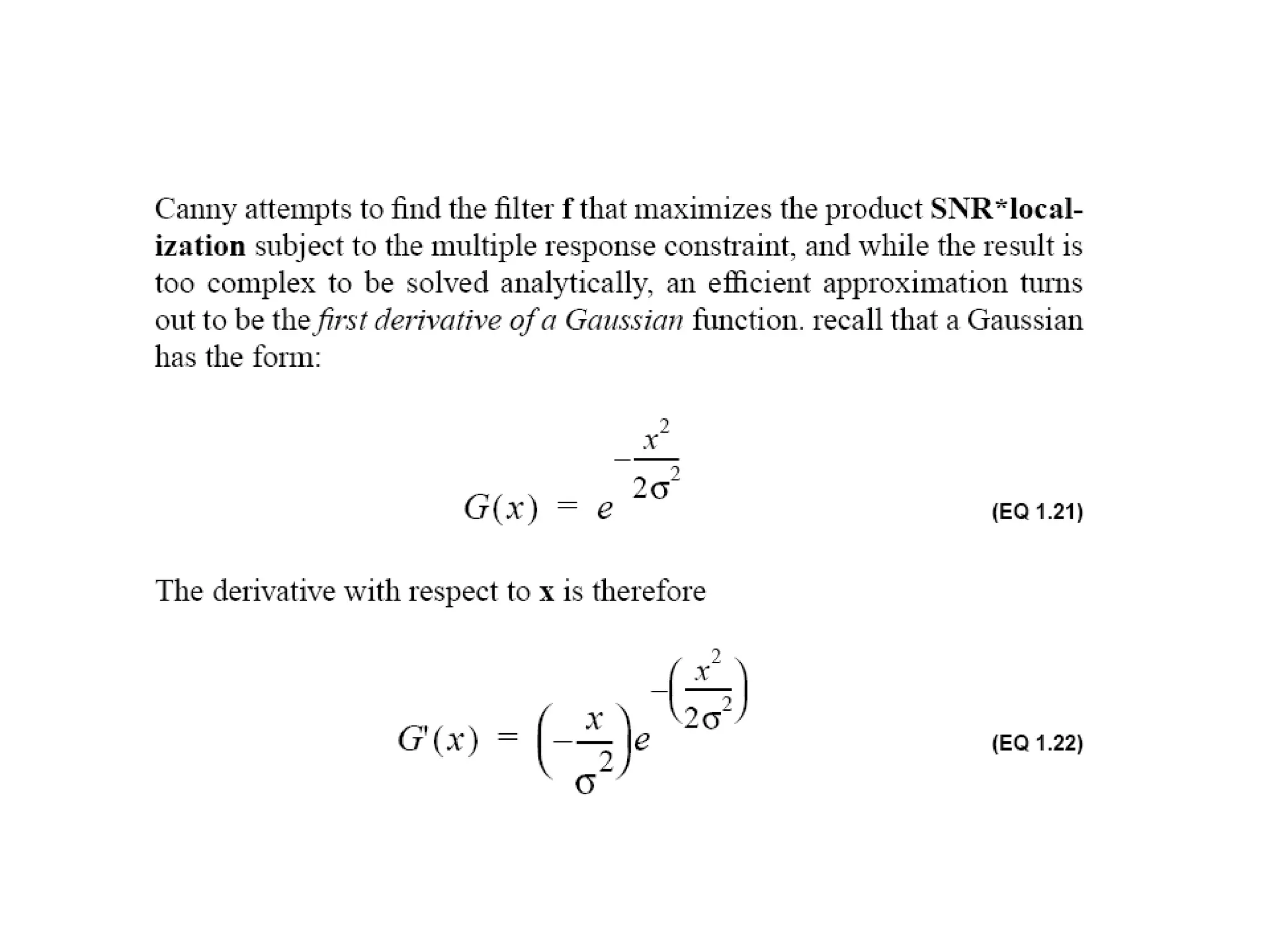
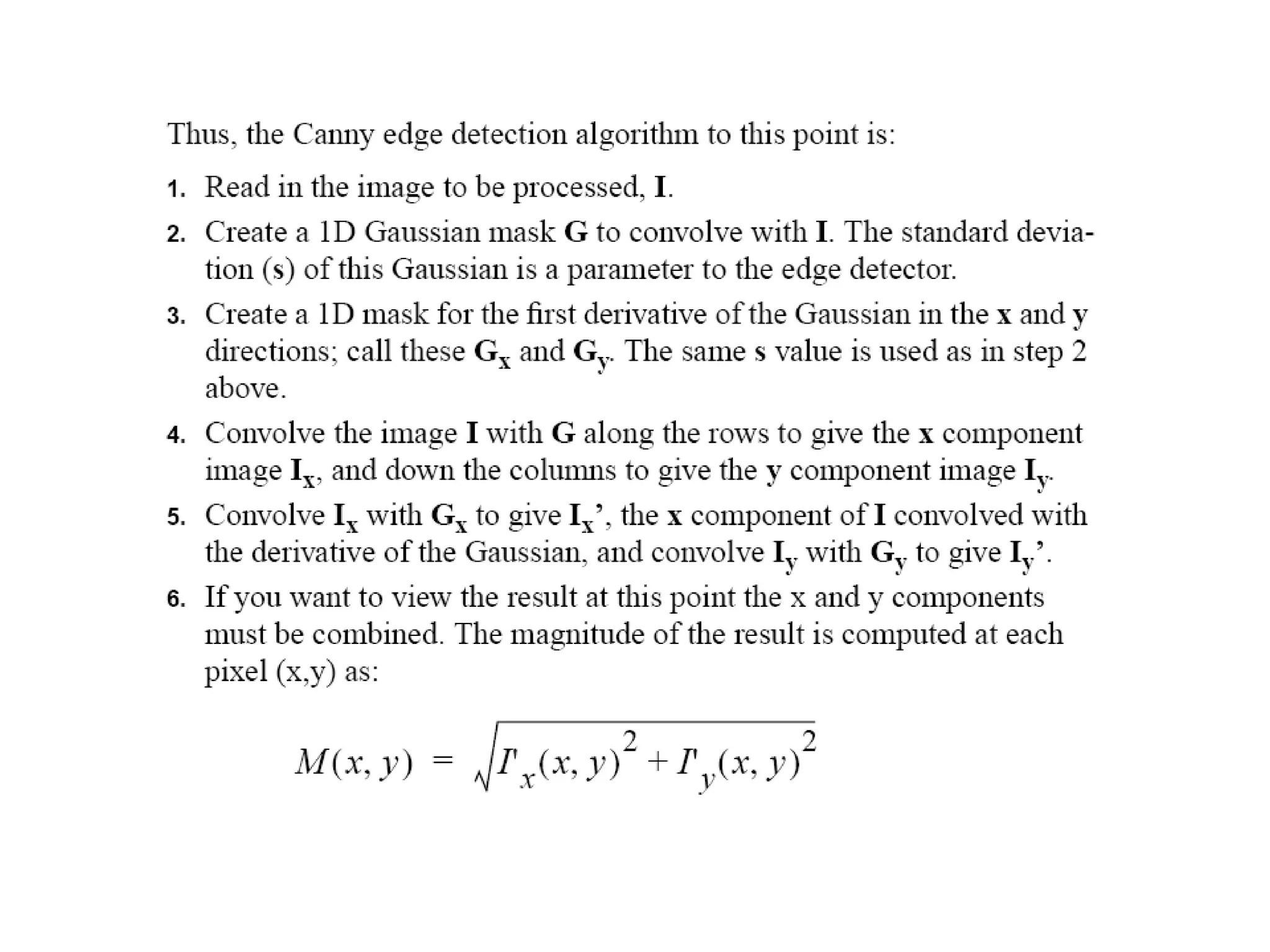
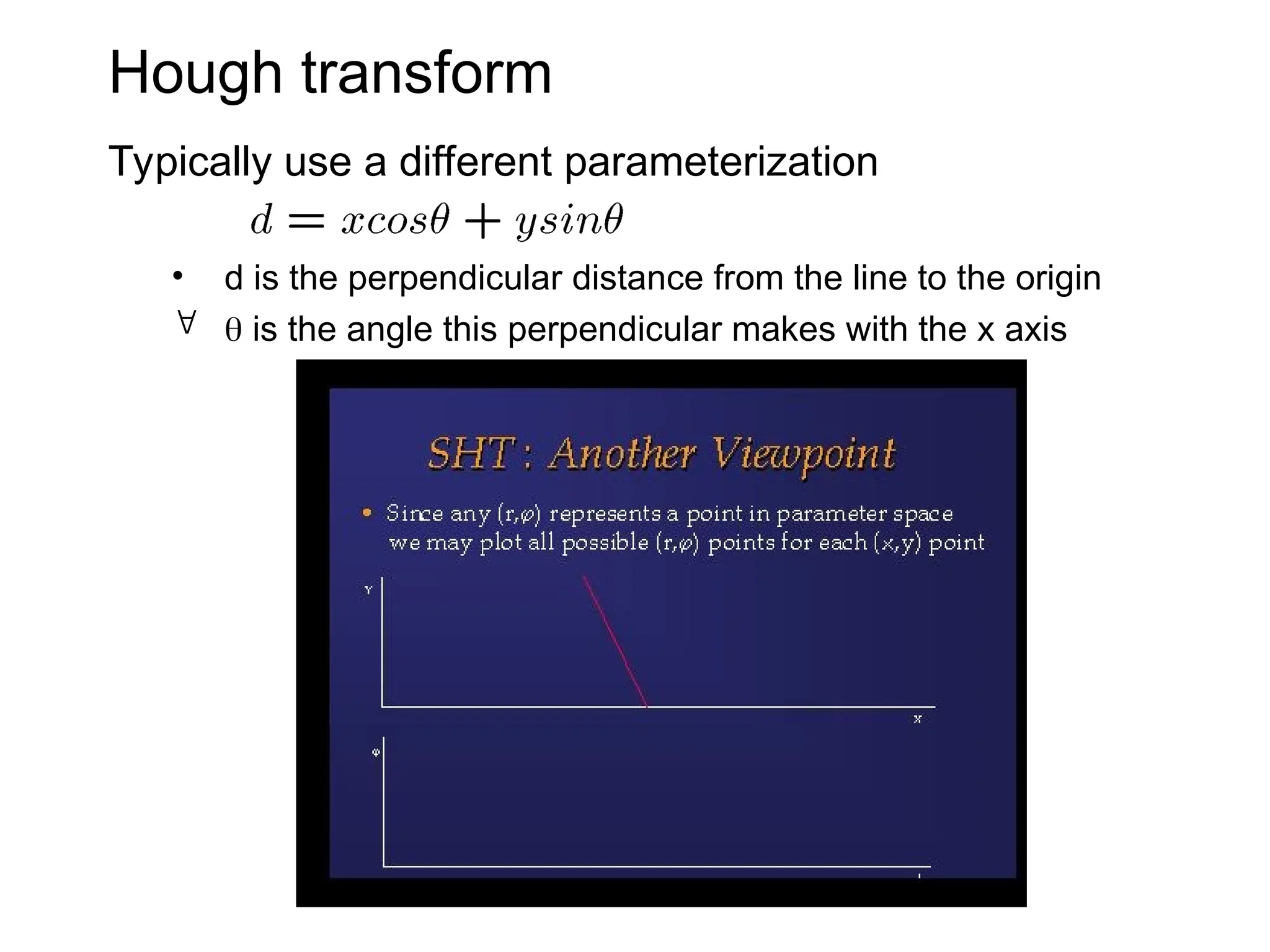
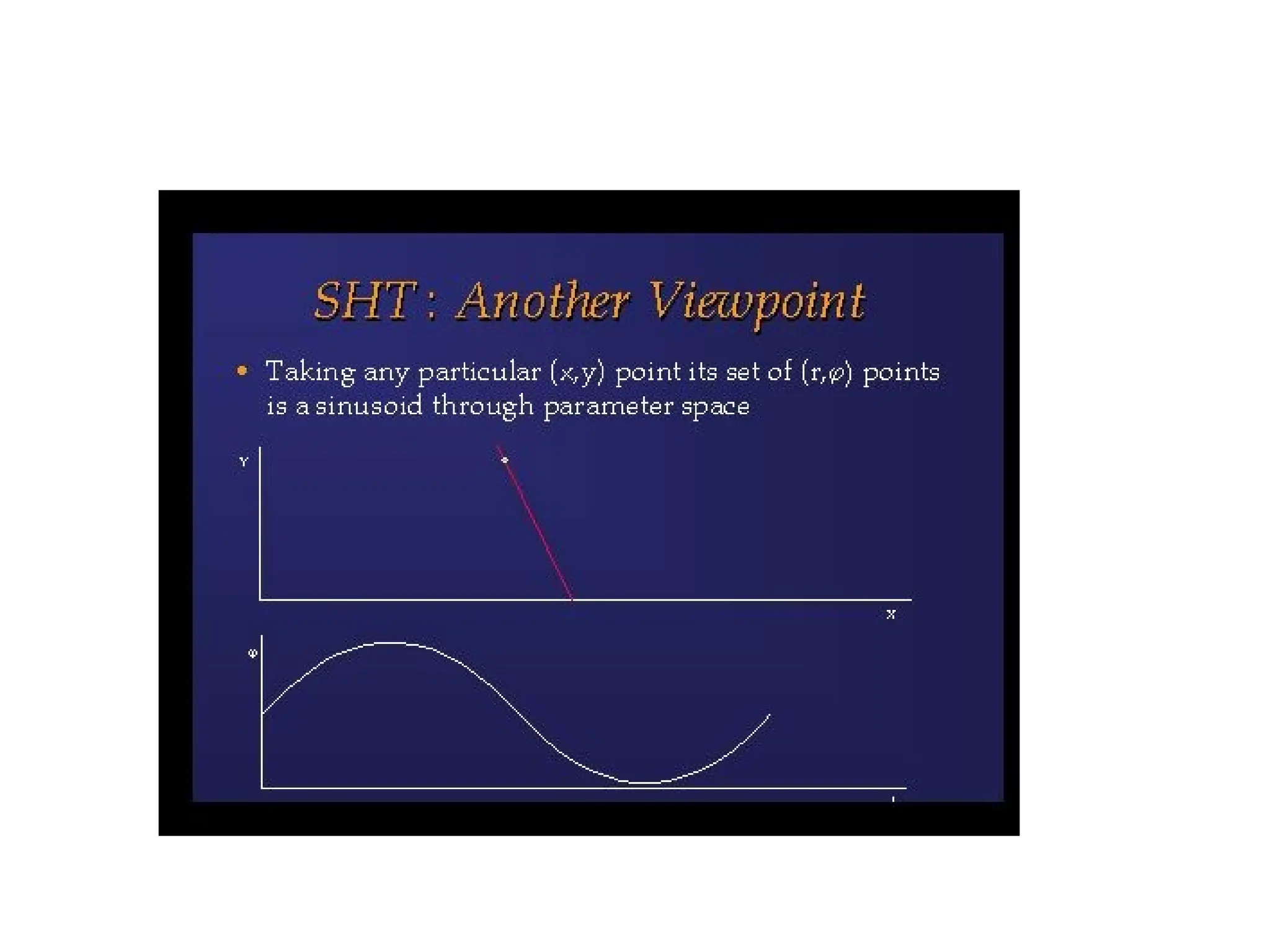
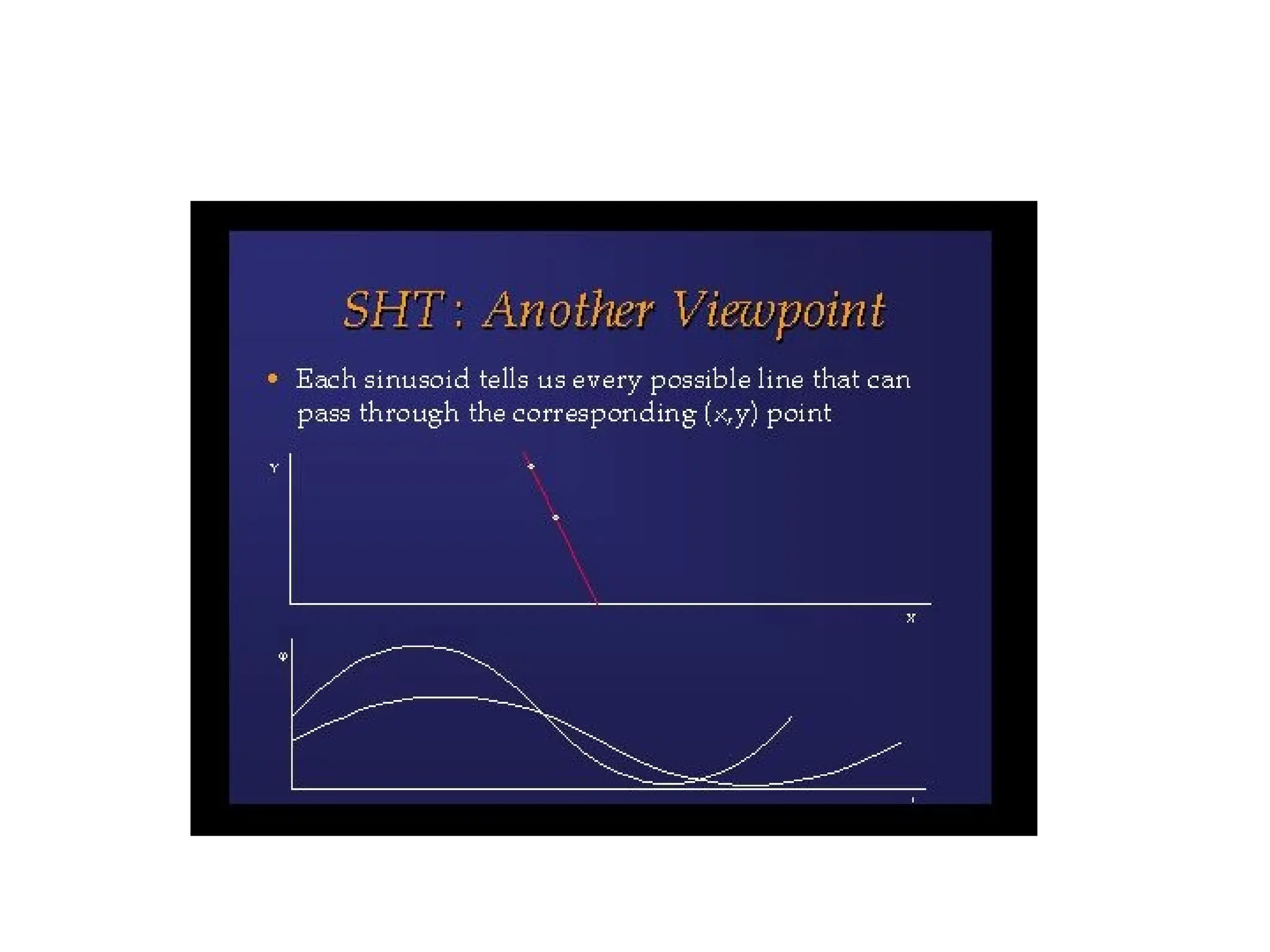
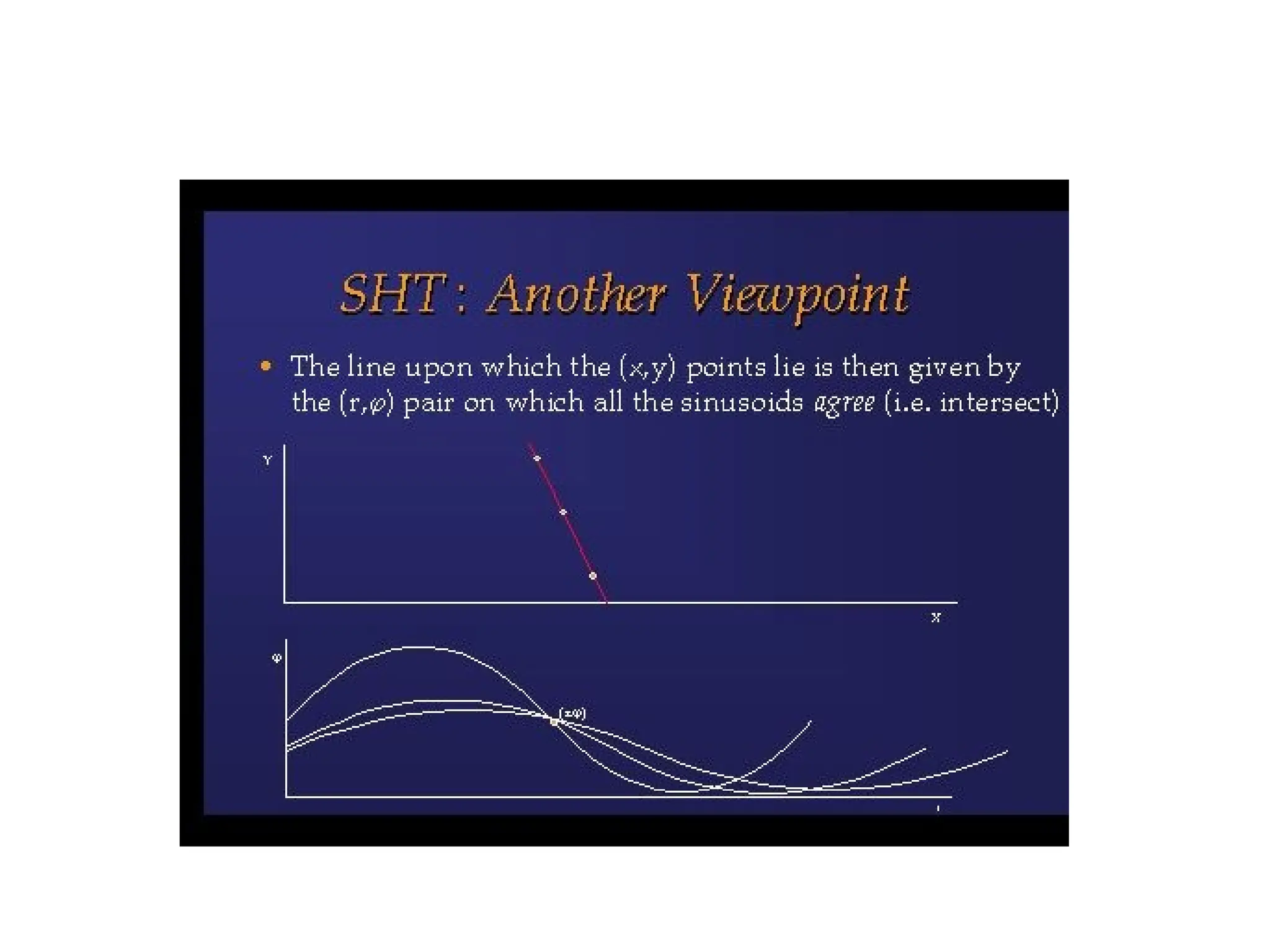
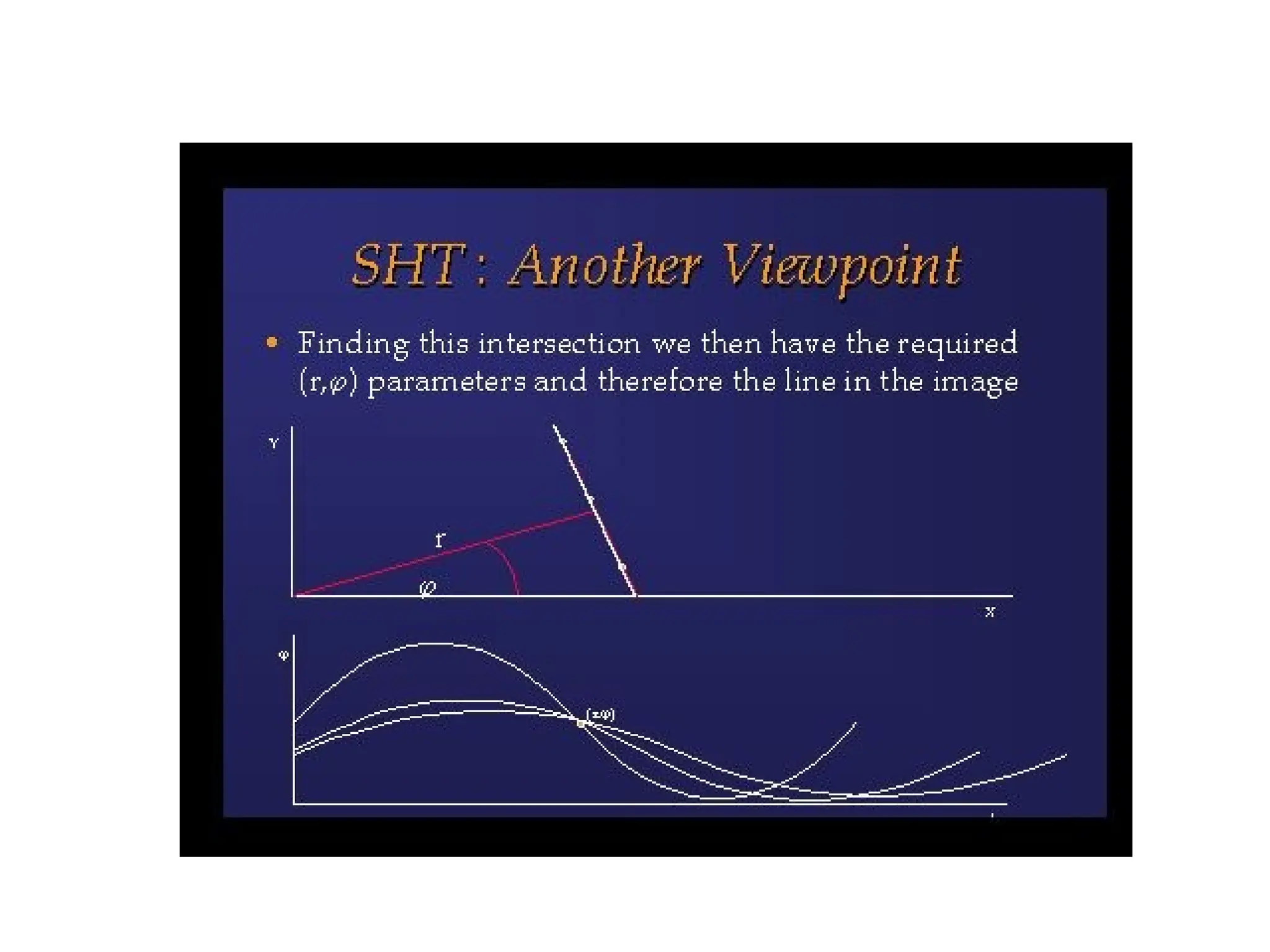
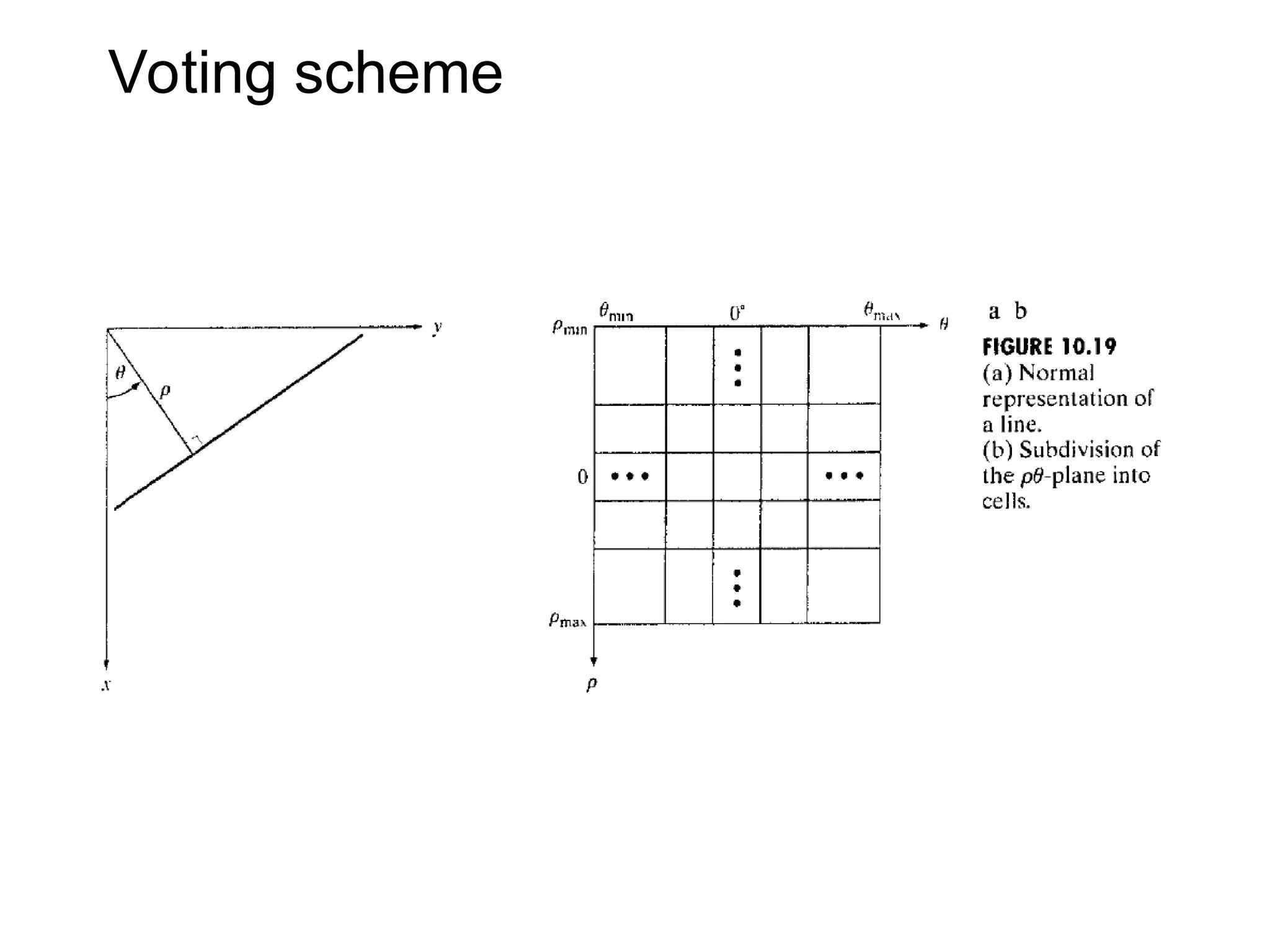
The document discusses edge detection in images, outlining techniques for identifying edges based on changes in image intensity. It covers methods such as gradient calculation, the use of various operators like Sobel and Prewitt, and concepts like the Hough transform for detecting lines. Additionally, it highlights challenges like noise and false positives/negatives in edge detection processes.