The document presents a design for a Model Reference Adaptive PID Control (MRAPIDC) algorithm aimed at stabilizing a two-tank liquid level system subject to significant parameter variations and external disturbances. The new adaptive PID controller incorporates a unique structure with a reference model and additional gain adjustments to enhance robustness and maintain stability, outperforming conventional PI controllers in various simulations. The results indicate that this adaptive controller effectively limits overshoot and recovery time, demonstrating advantages over existing control methods.
![International Journal of Electrical and Computer Engineering (IJECE)
Vol. 11, No. 1, February 2021, pp. 300~318
ISSN: 2088-8708, DOI: 10.11591/ijece.v11i1.pp300-318 300
Journal homepage: http://ijece.iaescore.com
Design of a model reference adaptive PID control algorithm
for a tank system
Yohan Darcy Mfoumboulou
Departement of Electrical, Electronic, and Computer Engineering,
Cape Peninsula University of Technology, South Africa
Article Info ABSTRACT
Article history:
Received Mar 31, 2020
Revised Jun 20, 2020
Accepted Jul 6, 2020
This paper describes the design of an adaptive controller based on model
reference adaptive PID control (MRAPIDC) to stabilize a two-tank process
when large variations of parameters and external disturbances affect
the closed-loop system. To achieve that, an innovative structure of
the adaptive PID controller is defined, an additional PI is designed to make
sure that the reference model produces stable output signals and three
adaptive gains are included to guarantee stability and robustness of
the closed-loop system. Then, the performance of the model reference
adaptive PID controller on the behaviour of the closed-loop system is
compared to a PI controller designed on MATLAB when both
closed-loop systems are under various conditions. The results demonstrate
that the MRAPIDC performs significantly better than the conventional
PI controller.
Keywords:
Adaptive
Linearization
MIT
MRAPIDC
Nonlinear
Parameters
Stability
This is an open access article under the CC BY-SA license.
Corresponding Author:
Yohan Darcy Mfoumboulou,
Departement of Electrical, Electronic and Computer Engineering,
Cape Peninsula University of Technology,
Bellville Campus, P.O Box 7530, South Africa.
Email: fabolous86yo@yahoo.fr
1. INTRODUCTION
Adaptive control of uncertain processes has become more and more important in industry. Adaptive
controllers differ from ordinary ones, because their parameters are variable, and there is a mechanism for
adjusting these parameters online based on signals in the system [1]. The design of an adaptive PI controller
to stabilize a mass damper-spring system under parameters’ uncertainties was proposed in [2]. The designed
adaptive PI controller adjusts to parameters’ variations, and the output of the process follows the set points,
regardless of the values of the parameters. But it does not guarantee stability when external disturbances and
large variations of parameters occur.
In [3], the design of a PID controller on MATLAB to maintain the level of liquid constant in
a coupled-tank system (CTS) was proposed. The control parameters were found using the trial and error
methodology and the results were analysed in MATLAB/Simulink environments. Proportional (P),
proportional integral (PI), proportional derivative (PD) and proportional integral derivative (PID) controllers
were applied on the process and their performances were compared to select the most suitable control
solution. The PID controller showed superior results, but it did not guarantee stability to disturbances and
variations of plant parameters.
Adaptive controllers, as opposed to conventional constant gain controllers (PID controllers),
are very effective in handling situations where the variations of parameters and environmental changes are
very frequent with the application of model reference adaptive control scheme in a first order system [4].](https://image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-1-2048.jpg)
![Int J Elec & Comp Eng ISSN: 2088-8708
Design of a model reference adaptive PID control… (Yohan Darcy Mfoumboulou)
301
They noticed that the newer adaptive control schemes could not cope with drastic changes in loads, inertias
and forces, unpredictable and sudden faults, or frequent, or unforeseen disturbances. Most conventional PID
controllers with constant gain were also unable to cope with these problems. For this reason, the authors
developed a control technique to solve these problems and added an adaptation gain to show the effects on
the system performance.
An adaptive control algorithm of a water tank model was simulated in [5]. It was concluded that,
compared to the one degree of freedom (1DOF) algorithm, the two degrees of freedom algorithm (2DOF)
reduced the control input demands, which was important from the practical point of view. But the 2DOF had
slower output response compared to the 1DOF.
A robust optimal adaptive control strategy was developed in [6] to deal with tracking problem of
a quadrotor unmanned aerial vehicle (UAV). The controller has a prominent ability to stabilize nonlinear
dynamic system of quadrotor, force the states to follow desired reference signals, and find optimal solution
for the tracking problem without control input saturation. The performance analysis of a conventional PID
controller and a MRAC was done in [7]. Cylindrical tank interacting and noninteracting systems were
selected as processes to be controlled. The results showed that the MRAC has better overshoot, settling time
and set-point tracking performance than the conventional PID controller.
The development of direct and indirect adaptive control methods to control the power in a TRIGA
MARK II reactor was proposed in [8]. The analysis showed that the adaptive algorithm offers overall better
results than the feedback control algorithm. The adaptive algorithm reduced the settling time up to 25% of
the nominal settling time.
A model reference adaptive controller without integral (MRACWI) parameter for position control of
a DC Motor was designed in [9]. The controller produced better performance in terms of settling time,
percentage overshoot and mean square error as compared with PID controller, standard MRAC and MRAC
with a sigma modification. A drawback of this algorithm is that its performance to variations of parameters
and external disturbances is unknown.
A comparison of the time specification performance between a conventional PID controller and
a modern sliding mode controller (SMC) for a nonlinear inverted pendulum system was done in [10].
The performances of both control strategies were assessed to see which one had better handling of
pendulum’s angle and cart’s position. The overall results of the analysis showed that the sliding mode
controller had faster rising time, better settling time and a much better percentage of overshoot compared to
the conventional PID. Both controllers did not have any steady state errors. Since the inverted pendulum is
a highly nonlinear system, this research showed two drawbacks. The authors did not investigate
the performance of the controllers when external disturbances and variations of parameters occur. These
studies would have made the investigation more realistic.
Advanced PID are also used in the medical sector, [11] proposed a fractional order PID controller
and an integer order PID controller for supressing epileptic activities. Both controllers showed great results to
stabilize the patient, but the fractional order PID controller is more suitable for implementation in FPGA
because it uses less flip-flops. Unfortunately, the study did not take in consideration sudden abnormal
activities of the brain cells to evaluate the time response taken by the controller to stabilize the patient.
This study is crucial to bring the patient back to a good health condition in the shortest time possible.
In [12], a novel data-driven sigmoid-based PI controller was designed to track the angular velocity
of dc motor powered by a dc/dc buck converter. The results of the investigations showed that the data-driven
sigmoid-based PI, which is tuned using global simultaneous perturbation stochastic approximation, yields
a better angular velocity tracking as compared to conventional PI and PI-Fuzzy. A drawback of this study is
that, the performance of the sigmoid-based controller was not evaluated for disturbance rejection.
In [13], the performance of the fractional order proportional-integral-derivative (FOPID) controllers
designed by using artificial bee colony (ABC) for fractional orders systems is compared to conventional PID
controller optimized by the ABC colony algorithm. The results of the simulations showed that the FOPID
controllers had significantly better performance compared to the conventional PID controllers. Unfortunately,
there was no study made to evaluate the performance of the controller when disturbances occur.
An adaptive safe experimentation dynamics (ASED) for data driven neuroendocrine-PID control of
MIMO Systems was designed in [14]. The performance of the ASED based method was compared to
the standard safe experimentation dynamics (SED) and simultaneous perturbation stochastic approximation
(SPSA) based methods. The results of the simulations showed that the ASED and SED based methods have
successfully solved the unstable convergence issue in the existing neuroendocrine-PID based standard SPSA.
Moreover, the presented ASED based algorithm outperforms the SED and the SPSA based methods in
the perspective of the control performance accuracy in terms of lower objective function, total norm error and
total norm input. A drawback of this research is that, the authors did not perform plant’s parameters changes
to see the influence of the adaptive gain of the ASED controller. The research gap and merit of the adaptive](https://image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-2-2048.jpg)
![ ISSN: 2088-8708
Int J Elec & Comp Eng, Vol. 11, No. 1, February 2021 : 300 - 318
302
PID controller developed in this paper compared to the other advanced PID controllers reviewed is that,
the proposed controller can stabilize the closed-loop system when variations of parameters and sudden
random disturbances occur simultaneously. None of the reviewed papers explored this scenario.
The main contribution of this paper is that it presents the design of a model reference adaptive PID
controller (MRAPIDC) based on the MIT approach to stabilize and optimize the linearized model of the two-
tank liquid level process affected by sudden changes of parameters and input disturbance. Then, a reference
model is developed based on control theory, and a PI regulator is designed on MATLAB to control
the reference model. The designed PI controller is a novel idea to add stability to the output signals of
the reference model, hence making the adaptive algorithm more robust. Another novelty of this research is
the inclusion of three new adaptive gains in the final structure of the MRAPIDC to make the closed-loop
system robust when large variations of parameters and sudden external disturbances occur simultaneously.
The controller keeps the percentage of overshoot of the closed-loop system below 10% and its recovery time
to sudden variations of parameters is lower than 5 seconds, which is a huge advantage compared to the other
adaptive controllers reviewed. Another advantage of this adaptive algorithm is that real-time tuning of
the three adaptive gains can be done to improve the performance of the closed-loop system. Furthermore,
the performance of the MRAPIDC is compared to a classic PI controller designed on MATLAB for
the linearized model of the two-tank system. The adaptive control algorithms, PI control algorithm and
the models of the closed-loop systems are simulated in MATLAB/Simulink.
The outline of this paper is as follows: the modelling and simulation of the process is proposed in
section 2. Section 3 discusses the design of a MRAPIDC based on model reference theory. The simulation
results are shown in section 4. Section 5 draws the conclusion.
2. MODELING AND SIMULATION OF THE TWO-TANK SYSTEM
In this paper, a two-tank liquid level system is selected as a plant to be controlled, because it is
a nonlinear inherently unstable system. The system is made of two-tank mounted above a reservoir, which
has the function of a storage element for liquid. The system has an independent pump to pump liquid from
the reservoir to the tanks. The two-tanks are interacting, which means that the liquid moves from one tank to
the other. When two tanks are state dependent, the interaction of liquid between the tanks exhibits a nonlinear
behaviour [15]. The simplified block diagram of the process is shown in Figure 1.
Figure 1. Block diagram of a two-tank liquid level process
The parameters of the two-tank liquid level system are the following:
ℎ1 = level of liquid in tank 1 in 𝑐𝑚
ℎ2 = level of liquid in tank 2 in 𝑐𝑚
𝐴1 = cross sectional area of tank 1 in 𝑐𝑚2](https://image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-3-2048.jpg)
![Int J Elec & Comp Eng ISSN: 2088-8708
Design of a model reference adaptive PID control… (Yohan Darcy Mfoumboulou)
303
𝐴2 = cross sectional area of tank 2 in 𝑐𝑚2
𝑎1 = cross sectional area of the outlet pipe in tank 1 in 𝑐𝑚2
𝑎2 = cross sectional area of the outlet pipe in tank 2 in 𝑐𝑚2
𝑄𝑖𝑛 = flow rate of liquid into tank 1 𝑐𝑚2
/𝑠𝑒𝑐
𝑄𝑜𝑢𝑡 = flow rate of liquid out of tank 2 𝑐𝑚2
/𝑠𝑒𝑐
𝛽1 = valve ratio of outlet pipe of tank 1
𝛽2 = valve ratio of the outlet pipe of tank 2
g = gravitational force
k = pump gain
u (t) = input voltage to the pump
The nonlinear equations of the two-tank liquid system model can be derived by applying
the Bernoulli’s law of conservation of mass [15]:
(1)
The nonlinear dynamic equations derived from tank 1 are:
(2)
(input flow)
(3)
The dynamic equations derived from tank 2 are:
(4)
(5)
At equilibrium for a continuous liquid level set-point, the derivative of the liquid levels in the tanks
must be zero ( ). In the scenario when: ; the system is state decoupled. Therefore,
to satisfy the conditions of the simulation of the liquid level system: , the level of liquid in tank 1
must be bigger than this of tank 2.
The state space representation of the nonlinear system is the following:
(6)
(7)
Then:
)
(
0
)
(
2
)
(
2
)
(
2
)
(
)
(
1
2
2
2
2
1
2
1
1
1
1
1
1
2
1
t
u
A
k
t
gh
A
a
t
h
g
A
a
t
h
g
A
a
dt
t
dh
dt
t
dh
(8)
out
in Q
Q
dt
dh
A
)
(
2
)
(
1
1
1
1
1 t
gh
a
Q
dt
t
dh
A in
in
Q
t
u
)
(
)
(
2
)
(
[
1
)
(
1
1
1
1
1
t
gh
a
t
ku
A
dt
t
dh
)
(
2
)
(
2
)
(
2
2
2
1
1
1
2
2 t
gh
a
t
gh
a
dt
t
dh
A
)
(
2
)
(
2
)
(
2
2
2
2
1
2
1
1
2
t
gh
A
a
t
gh
A
a
dt
t
dh
0
2
.
1
.
h
h 2
1 h
h
2
1 h
h
)
(
2
)
(
2
1
)
(
)
(
1
)
(
)
(
2
2
2
1
1
1
2
1
1
1
1
2
1
t
gh
a
t
gh
a
A
t
h
a
t
ku
A
dt
t
dh
dt
t
dh
T
T
h
h
h
h
C
y 2
1
2
1 1
0
](https://image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-4-2048.jpg)
![ ISSN: 2088-8708
Int J Elec & Comp Eng, Vol. 11, No. 1, February 2021 : 300 - 318
304
The parameters of the two-tank process are given in Table 1.
Table 1. Values of the parameters of the process
Parameters Values
75
1.5
1.5315195
0.6820043
981
30.0024
The next section is to derive a linearized model of the nonlinear tank process to find an accurate equivalence
of both models.
2.1. Linearization of the nonlinear model of the two-tank process
The linearization of the two-tank liquid system is performed around its operating points, and to
achieve that, only the linear terms of the Taylor series expansion of the nonlinear model are considered.
In (7) and (8) are considered to linearize the nonlinear model of the system.
Let define the state variables of the system:
ℎ1 = 𝑥1 = level of liquid in tank 1.
ℎ2 = 𝑥2 = level of liquid in tank 2.
By substituting ℎ1 and ℎ2, by 𝑥1 and 𝑥2 in (7) and (8), it is obtained:
[
𝑥
.
1
𝑥
.
2
] = [
−
𝛽1𝑎1
𝐴1
√2𝑔𝑥1
𝛽1𝑎1
𝐴2
√2𝑔𝑥1 −
𝛽2𝑎2
𝐴2
√2𝑔𝑥2
] + [
𝑘
𝐴1
0
] 𝑢 (9)
𝑦 = 𝐶[𝑥1 𝑥2]𝑇
= [0 1][𝑥1 𝑥2]𝑇
(10)
The (9) and (10) can be expressed by the standard nonlinear model:
𝑥
.
= 𝑓(𝑥) + 𝑔(𝑥)𝑢 = [
𝑓1(𝑥)
𝑓2(𝑥)
] + [
𝑔1(𝑥)
𝑔2(𝑥)
] 𝑢 (11)
𝑦 = 𝑜(𝑥) (12)
where: 𝑓(𝑥), 𝑔(𝑥) and 𝑜(𝑥) are the nonlinear vector functions of the state vector.
The linearization of the nonlinear model is performed according to Taylor series method.
The linearized model is derived based of the nonlinear functions 𝑓1 ,𝑓2, 𝑔1 and 𝑔2 . For the case of the two-
tank system, the nonlinear functions are:
𝑓1 = −
𝛽1𝑎1
𝐴1
√2𝑔𝑥1, 𝑔1 =
𝑘
𝐴1
𝑢 (13)
𝑓2 =
𝛽1𝑎1
𝐴2
√2𝑔𝑥1 −
𝛽2𝑎2
𝐴2
√2𝑔𝑥2, 𝑔2 = 0 (14)
The derivatives of the first function 𝑓1 according to the two states 𝑥1, 𝑥2 and the control input 𝑢:
𝜕
𝜕𝑥1
(𝑓1) =
𝜕
𝜕𝑥1
[−
𝛽1𝑎1
𝐴1
√2𝑔𝑥1]
T
T
h
h
h
h
C
y 2
1
2
1 1
0
)
(
, 2
2
1 cm
A
A
)
(
, 2
1
2 cm
a
a
1
2
)
sec
( 2
cm
g
k](https://image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-5-2048.jpg)
![Int J Elec & Comp Eng ISSN: 2088-8708
Design of a model reference adaptive PID control… (Yohan Darcy Mfoumboulou)
305
𝜕
𝜕𝑥1
(𝑓1) = −
𝑔𝛽1𝑎1
𝐴1√2𝑔𝑥1
(15)
Then:
𝜕
𝜕𝑥2
(𝑓1) =
𝜕
𝜕𝑥2
[−
𝛽1𝑎1
𝐴1
√2𝑔𝑥1]
𝜕
𝜕𝑥2
(𝑓1) = 0 (16)
The derivative according to 𝑢 is:
𝜕
𝜕𝑢
(𝑓1) = 0 (17)
Derivatives of the second function 𝑓2 according to the two states are:
𝜕
𝜕𝑥1
(𝑓2) =
𝜕
𝜕𝑥1
[
𝛽1𝑎1
𝐴2
√2𝑔𝑥1]
𝜕
𝜕𝑥1
(𝑓2) =
𝑔𝛽1𝑎1
𝐴2√2𝑔𝑥1
(18)
𝜕
𝜕𝑥2
(𝑓2) =
𝜕
𝜕𝑥2
[
𝛽1𝑎1
𝐴2
√2𝑔𝑥1 −
𝛽2𝑎2
𝐴2
√2𝑔𝑥2]
𝜕
𝜕𝑥2
(𝑓2) = −
𝑔𝛽2𝑎2
𝐴2√2𝑔𝑥2
(19)
The terms of the control matrix B can also be found with the same procedure:
Derivative of 𝑔1 per the two states:
𝜕
𝜕𝑥1
(𝑔1) =
𝜕
𝜕𝑥1
[
𝑘
𝐴1
]
𝜕
𝜕𝑥1
(𝑔1) = 0 (20)
For 𝑥2:
𝜕
𝜕𝑥2
(𝑔1) =
𝜕
𝜕𝑥2
[
𝑘
𝐴1
]
𝜕
𝜕𝑥2
(𝑔1) = 0 (21)
Derivative of 𝑔2 according to the two states:
𝜕
𝜕𝑥1
(𝑔2) = 0 (22)
𝜕
𝜕𝑥2
(𝑔2) = 0 (23)
After all the linearized expressions of the system are done, the linearized state space representation
of the two-tank process is:
[
𝑥
.
1
𝑥
.
2
] = [
−
𝑔𝛽1𝑎1
𝐴1√2𝑔𝑥1
0
𝑔𝛽1𝑎1
𝐴2√2𝑔𝑥1
(−
𝑔𝛽2𝑎2
𝐴2√2𝑔𝑥2
)
] [
𝑥1
𝑥2
] + [
𝑘
𝐴1
0
] 𝑢 (24)
𝑦 = [0 1] [
𝑥1
𝑥2
]](https://image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-6-2048.jpg)
![ ISSN: 2088-8708
Int J Elec & Comp Eng, Vol. 11, No. 1, February 2021 : 300 - 318
306
where the coefficients of the matrices defined in (24) are calculated for the equilibrium values of the state
variables given by (6) and (7). At equilibrium for continuous liquid level set-point, the derivative must be
zero (ℎ1
̇ = ℎ2
̇ = 0). In the scenario when: ℎ1 = ℎ2, the system is state decoupled. Therefore, to satisfy
the conditions of the simulation of the liquid level system: ℎ1 > ℎ2. The model defined by (6) and (7) will be
used to develop the adaptive control algorithm.
3. DESIGN OF A MODEL-REFERENCE ADAPTIVE PID-CONTROLLER
The Massachusetts Institute of Technology (MIT) rule is a gradient rule. It was derived at MIT in its
instrumentation laboratory, hence its name. The MIT rule is the original approach to model reference
adaptive control (MRAC) [15, 16]. To give a representation of the MIT rule, let consider 𝜃 as an adjustable
parameter of a controller. The desired closed-loop response of the output is 𝑦𝑚; and the error between
the output 𝑦 of the closed-loop system and the output 𝑦𝑚 of the refrerence model is ε. In the paper,
the desired output 𝑦𝑚 is proposed to be determined by a reference model output. To define the MIT rule,
let consider the following loss function [17]:
𝐽(𝜃) =
1
2
𝜀2
(25)
It is necessary to determine at every moment of time the parameters of the controller in such a way that the
function 𝐽(𝜃) is minimized.
The MIT fundamental approach consists of adjusting the parameters of the closed-loop system such
that the loss function described in (25) is minimized. To minimize the function 𝐽(𝜃), a realistic approach
would be to change the parameters of the system in the direction of the negative gradient of 𝐽:
𝑑𝜃
𝑑𝑡
= −𝛾
𝜕𝐽
𝜕𝜃
= −𝛾𝜀 (
𝜕𝜀
𝜕𝜃
) (26)
where: 𝛾 is an adaptation gain; and (
𝜕𝜀
𝜕𝜃
) is the sensitivity derivative function of the system towards its time-
varying parameters. 𝜃 represents in this case, the time varying parameters of the controller.
In (26) is the MIT rule. The sensitivity derivative expresses how the adjustable parameters influence
the error. In general, it is assumed that the parameter changes are slower than the other variables of
the system. Hence, the sensitivity derivative (
𝜕𝜀
𝜕𝜃
) can be evaluated by assuming that the adjustable parameter
𝜃 is constant. To summarize, the following steps can be used to design an adaptive controller based on
the MIT rule:
Define the coefficients of the transfer function of a plant with unknown parameters.
Choose a reference model.
Choose a control algorithm to achieve perfect model tracking.
Define the error of the closed-loop system.
Derive the expressions of the control parameters.
Apply the negative gradient of 𝐽 to find the updating parameters.
3.1. Determination of the transfer function coefficients for the linearized model
The state space representation of the tank process is represented as given in (24):
[
𝑥
.
1
𝑥
.
2
] = [
−
𝑔𝛽1𝑎1
𝐴1√2𝑔𝑥1
0
𝑔𝛽1𝑎1
𝐴2√2𝑔𝑥1
(−
𝑔𝛽2𝑎2
𝐴2√2𝑔𝑥2
)
] [
𝑥1
𝑥2
] + [
𝑘
𝐴1
0
] 𝑢
𝑦 = [0 1] [
𝑥1
𝑥2
]
To make mathematical calculations much simpler, (24) is rewritten as:
[
𝑥̇1
𝑥̇2
] = [
𝑇11 0
𝑇21 𝑇22
] [
𝑥1
𝑥2
] + [
𝑘
𝐴1
0
] 𝑢
𝑦 = [0 1] [
𝑥1
𝑥2
]](https://image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-7-2048.jpg)
![Int J Elec & Comp Eng ISSN: 2088-8708
Design of a model reference adaptive PID control… (Yohan Darcy Mfoumboulou)
307
where:
𝑇11 = −
𝑔𝛽1𝑎1
𝐴1√2𝑔𝑥1
; 𝑇21 =
𝑔𝛽1𝑎1
𝐴2√2𝑔𝑥1
; 𝑇22 = −
𝑔𝛽2𝑎2
𝐴2√2𝑔𝑥2
The matrices of the state space model can be represented as:
𝐴 = [
𝑇11 0
𝑇21 𝑇22
] ; 𝐵 = [
𝑘
𝐴1
0
]; 𝐶 = [0 1]; and 𝐷 = 0.
To transform the state space model of the linearized system to transfer function, the following
formula is applied [18]:
𝑇𝑓(𝑠) =
𝑁(𝑠)
𝑃(𝑠)
= 𝐶(𝑠𝐼 − 𝐴)−1
𝐵 + 𝐷
where I is the identity matrix, and:
𝑠𝐼 = [
𝑠 0
0 𝑠
]
The calculation of the transfer function of the linearized model is the following:
𝑇𝑓(𝑠) = [0 1] × ([
𝑠 0
0 𝑠
] − [
𝑇11 0
𝑇21 𝑇22
])
−1
× [
𝑘
𝐴1
0
]
𝑇𝑓(𝑠) = [0 1] × ([
(𝑠 − 𝑇11) 0
−𝑇21 (𝑠 − 𝑇22)
])
−1
× [
𝑘
𝐴1
0
]
Then:
𝑇𝑓(𝑠) = [0 1] × [
𝑎𝑑𝑗 [
(𝑠 − 𝑇11) 0
−𝑇21 (𝑠 − 𝑇22
]
|
(𝑠 − 𝑇11) 0
−𝑇21 (𝑠 − 𝑇22)
|
] × [
𝑘
𝐴1
0
]
𝑇𝑓(𝑠) = [0 1] ×
[
[
(𝑠 − 𝑇22) 0
𝑇21 (𝑠 − 𝑇11)
]
[𝑠2 + (−𝑇11 − 𝑇22)𝑠 + 𝑇11𝑇22]
]
× [
𝑘
𝐴1
0
]
𝑇𝑓(𝑠) = [0 1] ×
[
[
(𝑠 − 𝑇22) × (
𝑘
𝐴1
)
𝑇21 (
𝑘
𝐴1
)
]
[𝑠2 + (−𝑇11 − 𝑇22)𝑠 + 𝑇11𝑇22]
]
𝑇𝑓(𝑠) = [
(𝑜) × (𝑠 − 𝑇22) × (
𝑘
𝐴1
) + (1) × 𝑇21 (
𝑘
𝐴1
)
[𝑠2 + (−𝑇11 − 𝑇22)𝑠 + 𝑇11𝑇22]
]
The final representation of the transfer function of the linearized model is:](https://image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-8-2048.jpg)
![ ISSN: 2088-8708
Int J Elec & Comp Eng, Vol. 11, No. 1, February 2021 : 300 - 318
308
𝑇𝑓(𝑠) =
𝑇21 (
𝑘
𝐴1
)
𝑠2 + (−𝑇11 − 𝑇22)𝑠 + 𝑇11𝑇22
The design of the model reference adaptive PID controller to stabilize the developed linearized model is
described in the next section.
3.2. Procedure to design the model-reference adaptive PID-controller (MRAPIDC) for the linearized
model of the two-tank liquid level system
To make the derivation of the adaptive PID controller much simpler mathematically, the final
expression of the transfer function of the linearized model is simplified as:
𝐺(𝑠) =
𝑎3
𝑎0𝑠2 + 𝑎1𝑠 + 𝑎2
where:
𝑇𝑓(𝑠) = 𝐺(𝑠); 𝑎0 = 1; 𝑎1 = (−𝑇11 − 𝑇22); 𝑎2 = 𝑇11𝑇22 𝑎3 = 𝑇21 (
𝑘
𝐴1
)
The parameters of the new transfer function are defined as:
𝑎1 = 𝜃1𝑙1, 𝑎2 = 𝜃2𝑙2 and 𝑎3 = 𝜃3𝑙3.
𝜃1, 𝜃2 and 𝜃3 are the varying parameters; and 𝑙1, 𝑙2 and 𝑙3 are the fixed parameters of the process.
3.2.1. Design of the desired linear reference model
The linearized model of the tank system is of a second order. Therefore, the linear reference model
can be designed as a typical second order transfer function as follows:
From the design specifications, the values of the dominant poles can be obtained as follows:
𝑅(𝑠) =
𝜔𝑛
2
𝑠2+2𝜔𝑛𝜁𝑠+𝜔𝑛
2 =
𝑌𝑚(𝑠)
𝑅𝑖𝑛(𝑠)
(27)
where: 𝑅(𝑠) is the transfer function of the reference model, 𝑌𝑚 is the output of the reference model and 𝑅𝑖𝑛 is
its input.
Then the output of the reference model is:
𝑌𝑚(𝑠) =
𝜔𝑛
2
𝑠2+2𝜁𝜔𝑛𝑠+𝜔𝑛
2 𝑅𝑖𝑛(𝑠) (28)
To guarantee the stability of the closed-loop system, the reference model must meet the following
design characteristics:
Percentage of Overshoot (PO): 8%
Settling time: 2 seconds
T ime delay: 0 second
Steady state error: 0
From the design specifications, the values of the dominant poles can be obtained as follows [19, 20]:
The damping ratio for a percentage of overshoot (PO) of 8% is:
𝜁 = √
(𝑙𝑛
𝑃𝑂
100%
)2
𝜋2+(𝑙𝑛
𝑃𝑂
100%
)2
𝜁 = √
𝑙𝑛( 0.08)2
𝜋2 + 𝑙𝑛( 0.08)2
= 0.63](https://image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-9-2048.jpg)
![Int J Elec & Comp Eng ISSN: 2088-8708
Design of a model reference adaptive PID control… (Yohan Darcy Mfoumboulou)
309
The phase angle of the dominant poles is:
𝜑 = 𝑐𝑜𝑠−1
( 𝜁) = 𝑐𝑜𝑠−1
( 0.63)
𝜑 = 50.95∘
The values of the real and imaginary poles are calculated as follow:
𝑅𝑒 𝑎 𝑙(𝑠) = −
4
𝑇𝑠
= −
4
2𝑠
= −2
𝐼𝑚 𝑎 𝑔(𝑠) = 𝑅𝑒 𝑎 𝑙(𝑠) × 𝑡𝑎𝑛( 𝜑) = −2 𝑡𝑎𝑛( 50.95∘
)
𝐼𝑚 𝑎 𝑔(𝑠) = −2.46𝑖
The value of the first dominant pole is:
𝑃1 = 𝑅𝑒 𝑎 𝑙(𝑠) + 𝐼𝑚 𝑎 𝑔(𝑠)
𝑃1 = −2 − 2.46𝑖
The natural frequency of the reference model is found based on the polynomial of the dominant poles:
𝑃𝑑𝑜𝑚(𝑠) = (𝑠 + 2 + 2.46𝑖)(𝑠 + 2 − 2.46𝑖)
𝑃𝑑𝑜𝑚(𝑠) = 𝑠2
+ 4𝑠 + 10.0516
𝜔𝑛 = √10.0516 = 3.17𝑟𝑎𝑑/𝑠
The desired closed-loop transfer function of the reference model is:
𝑅(𝑠) =
10.0516
𝑠2 + 4𝑠 + 10.0516
To ensure stability and robustness of the closed-loop system when large variations of parameters
occur, a proportional integral (PI) controller is designed on MATLAB for the reference model R(s) using
the programming command line 𝑝𝑖𝑑 (𝐾𝑝, 𝐾𝑖) [21, 22]. The parameters 𝐾𝑝 and 𝐾𝑖 are tunned to find their
optimal values. This additional PI has also the ability to guarantee stability when sudden external
disturbances affecting the two-tank process occur. The parameters of the PI controller are:
𝐾𝑝 = 0.001 and 𝐾𝑖 = 4
The transfer function of the PI controller is the following:
𝐺𝑃𝐼(𝑠) =
𝐾𝑝𝑠 + 𝐾𝑖
𝑠
=
0.001𝑠 + 4
𝑠
3.2.2. Selection of the control algorithm to achieve perfect model tracking
To achieve perfect model tracking, the following proportional integral derivative (PID) control
algorithm is selected for the process as:
𝑢(𝑡) = 𝑘𝑝𝑒(𝑡) + 𝑘𝑖 ∫ 𝑒(𝑡)𝑑𝑡 − 𝑘𝑑 𝑦̇(𝑡) (29)
where: 𝑘𝑝 is the proportional gain; 𝑘𝑖 is the integral gain; 𝑘𝑑 is the derivative gain; 𝑦 is the plant output;
and 𝑒(𝑡) = 𝑟𝑖𝑛(𝑡) − 𝑦(𝑡), with 𝑟𝑖𝑛(𝑡) as the input of the reference model.
The representation of the PID controller in Laplace domain is:
𝑈(𝑠) = 𝐾𝑝𝐸(𝑠) +
1
𝑠
𝐾𝑖𝐸(𝑠) − 𝑠𝐾𝑑𝑌(𝑠) (30)](https://image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-10-2048.jpg)
![ ISSN: 2088-8708
Int J Elec & Comp Eng, Vol. 11, No. 1, February 2021 : 300 - 318
310
The output 𝑌(𝑠) of the two-tank liquid level process can be found as follows:
𝑌(𝑠) = 𝐺(𝑠)𝑈(𝑠) (31)
The substitution of (30) into (31) gives:
𝑌(𝑠) = 𝐺(𝑠) [𝐾𝑝𝐸(𝑠) +
1
𝑠
𝐾𝑖𝐸(𝑠) − 𝑠𝐾𝑑𝑌(𝑠)]
The closed-loop system is:
𝑌(𝑠) = 𝐺(𝑠)𝐸(𝑠) [𝐾𝑝 +
1
𝑠
𝐾𝑖] − 𝑠𝐾𝑑𝑌(𝑠)𝐺(𝑠) (32)
It is known that:
𝐸(𝑠) = 𝑅𝑖𝑛(𝑠) − 𝑌(𝑠)
Then 𝐸(𝑠) is substituted in (32):
𝑌(𝑠) = 𝐺(𝑠)[𝑅𝑖𝑛(𝑠) − 𝑌(𝑠)] [𝐾𝑝 +
1
𝑠
𝐾𝑖] − 𝑠𝐾𝑑𝑌(𝑠)𝐺(𝑠)
𝑌(𝑠) + [𝐾𝑝 +
1
𝑠
𝐾𝑖 + 𝑠𝐾𝑑] 𝐺(𝑠)𝑌(𝑠) = 𝐺(𝑠)𝑅𝑖𝑛(𝑠) [𝐾𝑝 +
1
𝑠
𝐾𝑖]
𝑌(𝑠) [1 + (𝐾𝑝 +
1
𝑠
𝐾𝑖 + 𝑠𝐾𝑑)𝐺(𝑠)] = 𝐺(𝑠)𝑅𝑖𝑛(𝑠) [𝐾𝑝 +
1
𝑠
𝐾𝑖]
𝑌(𝑠) =
[𝑠𝐾𝑝𝐺(𝑠)+𝐾𝑖𝐺(𝑠)]𝑅𝑖𝑛(𝑠)
𝑠2𝐾𝑑𝐺(𝑠)+(1+𝐾𝑝𝐺(𝑠))𝑠+𝐾𝑖𝐺(𝑠)
(33)
The PID coefficients are not known. It is necessary to determine them in such a way that the PID
controller has adaptive behaviour towards the parameters variations of the process to be controlled.
The design of the PID controller is further done in the time domain. In the time domain, (33) can be written
as given in [2-23], because of the following:
The model parameters vary at every moment of time.
The adaptive controller must change its parameters also at every moment of time.
To convert (28) to the time domain, a differential operator is introduced [23]. In (36) represents the
cost function in (25), and 𝜃 = 𝑘𝑝, 𝑘𝑖, 𝑘𝑑.
Following [2-23], the representation of (33) in the time domain is:
)
(
))
(
1
(
)
(
)
(
)
(
)
(
)
( 2
t
g
k
p
t
g
k
t
g
k
p
t
r
t
g
k
t
g
pk
t
y
i
p
d
in
i
p
(34)
where: 𝑝 is a differential operator.
3.2.3. Determination of the error between the plant states and the reference model states
The tracking error of the closed-loop system and the reference model is [24, 25]:
𝜀(𝑡) = 𝑦(𝑡) − 𝑦𝑚(𝑡) (35)
Substituting (28) and (34) in (35) gives:
𝜀(𝑡) =
[𝑝𝑘𝑝𝑔(𝑡)+𝑘𝑖𝑔(𝑡)]𝑟𝑖𝑛(𝑡)
𝑝2𝑘𝑑𝑔(𝑡)+(1+𝑘𝑝𝑔(𝑡))𝑝+𝑘𝑖𝑔(𝑡)
−
𝜔𝑛
2
𝑝2+2𝜁𝜔𝑛𝑝+𝜔𝑛
2 𝑟𝑖𝑛(𝑡) (36)](https://image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-11-2048.jpg)

![ ISSN: 2088-8708
Int J Elec & Comp Eng, Vol. 11, No. 1, February 2021 : 300 - 318
312
4. SIMULATION RESULTS
The Simulink diagram of the closed-loop system with the derived adaptive PID controller is shown
in Figure 2. The simulation is done in MATLAB/Simulink environment. The closed-loop system is made of
the following subsystems:
Plant model represented as a second order transfer function.
Reference model.
Adaptation control algorithms.
Figure 2. Simulink diagram of the adaptive control algorithm based on the MIT rule
The simulations are done to evaluate the performance of the adaptive scheme under the following
parameters:
The set-points are: 10cm and 13cm.
The values of the adaptation gains are: 𝛾𝑝
= 28.5, 𝛾𝑖
= 1.18 × 10−3
and 𝛾𝑑
= −15.
A random disturbance of magnitude 0.8 and frequency 0.1 Hertz occurs at the output of the plant.
𝛽1
(valve ratio of the outlet pipe tank 1) and 𝛽2
(valve ratio of the outlet pipe of tank 2) are unknown, but
their values are bounded to a range of values.
𝛽1
varies within the following interval: [1.22522 1.9895]. The values: 1.3784; 1.5315195; 1.6081 and
1.6847 are selected randomly.
𝛽2
varies within the following interval: [0.545603 0.818405]. The values: 0.5661; 0.6820043; 0.6615
and 0.7502 are randomly selected.
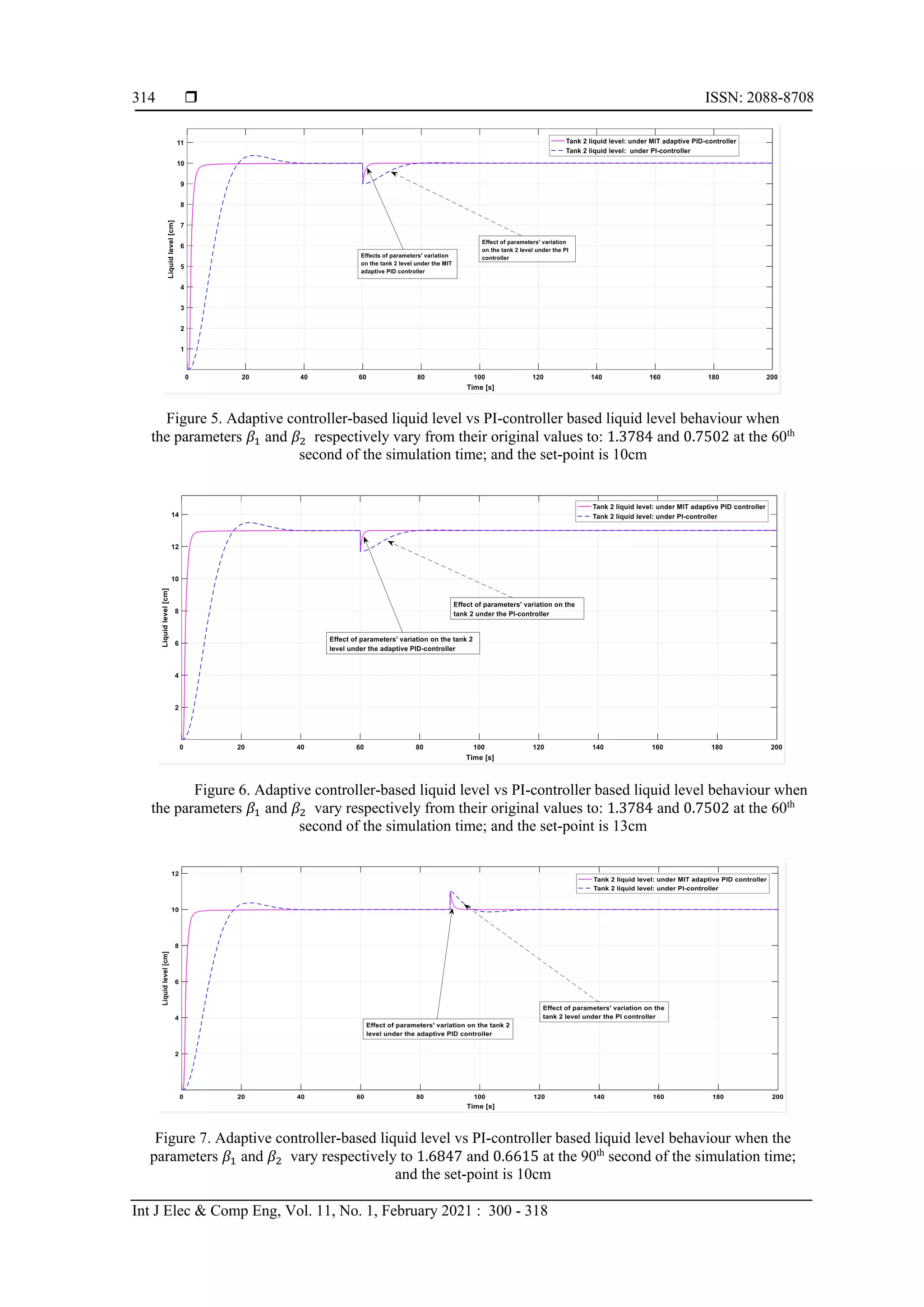
4.1. Case 1: Simulation of the closed-loop adaptive system where there are no variations of
the parameters
The simulation shows the following results:
The graphs of the level of liquid 𝑦 in Tank 2.
𝛽1 (valve ratio of the outlet pipe tank 1) and 𝛽2 (valve ratio of the outlet pipe of tank 2) are at their
original values: 𝛽1 = 1.5315195 and 𝛽2 = 0.6820043.
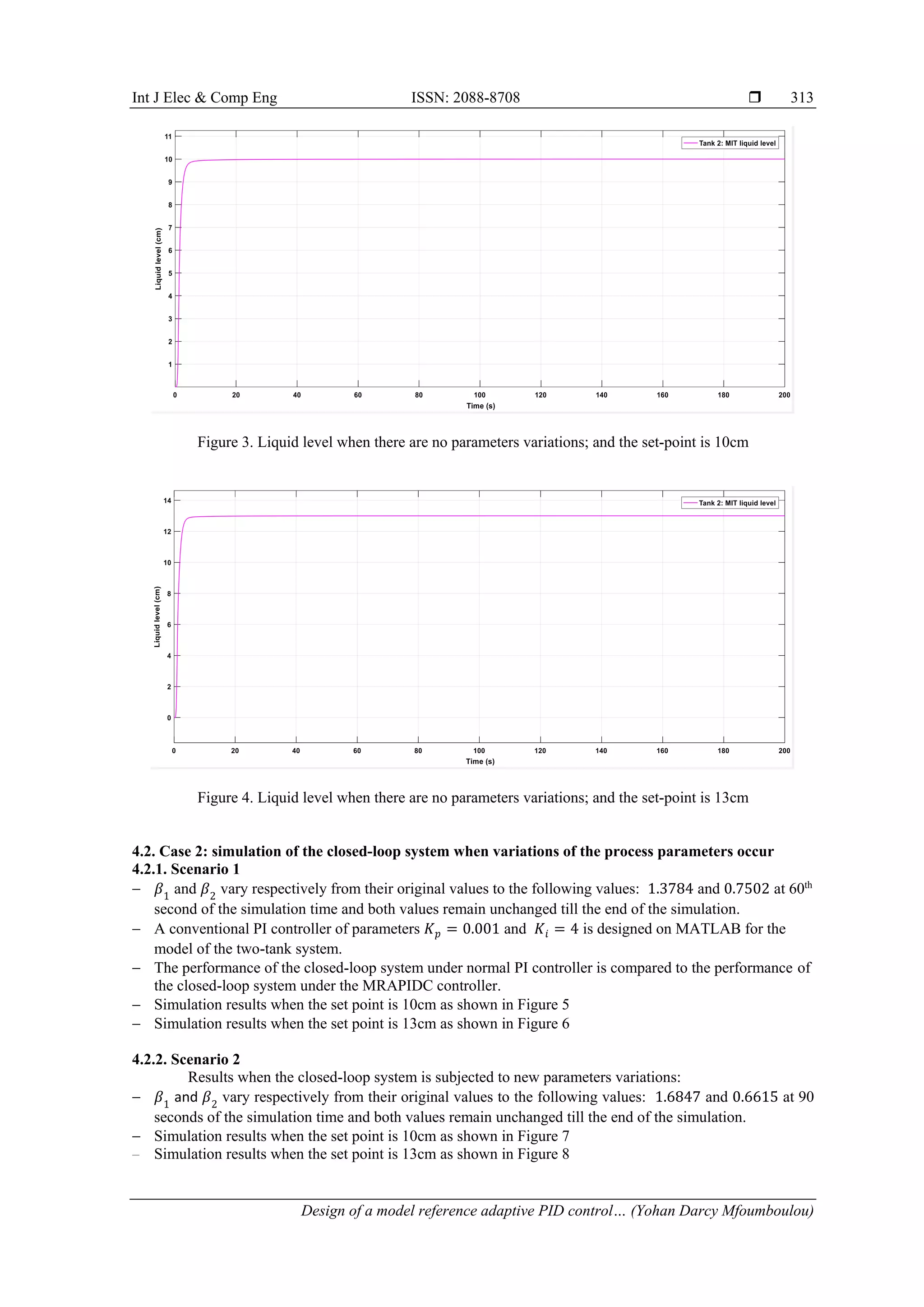
Simulation results when the set point is 10cm as shown in Figure 3.
Simulation results when the set point is 13cm as shown in Figure 4.
The results of the simulations show that the designed model reference adaptive PID-controller has
excellent tracking performance, good rising time and it does not have any overshoot and steady state error.](https://image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-13-2048.jpg)

![Int J Elec & Comp Eng ISSN: 2088-8708
Design of a model reference adaptive PID control… (Yohan Darcy Mfoumboulou)
317
Figure 11. Adaptive controller-based liquid level vs PI-controller based liquid level when at the 50th
second
of the simulation time; 𝛽1 and 𝛽2 vary respectively from their original values to: 1.6081 and 0.5661,
at the same time a random input disturbance occurs and both remain unchanged till the end of the simulation;
the set-point is 13cm
The results of the simulation show that the adaptive PID controller is robust to parameters’
variations and rejects input disturbance, while the conventional PI controller shows an unstable convergence
behaviour. The performance of the adaptive PID controller is outstanding.
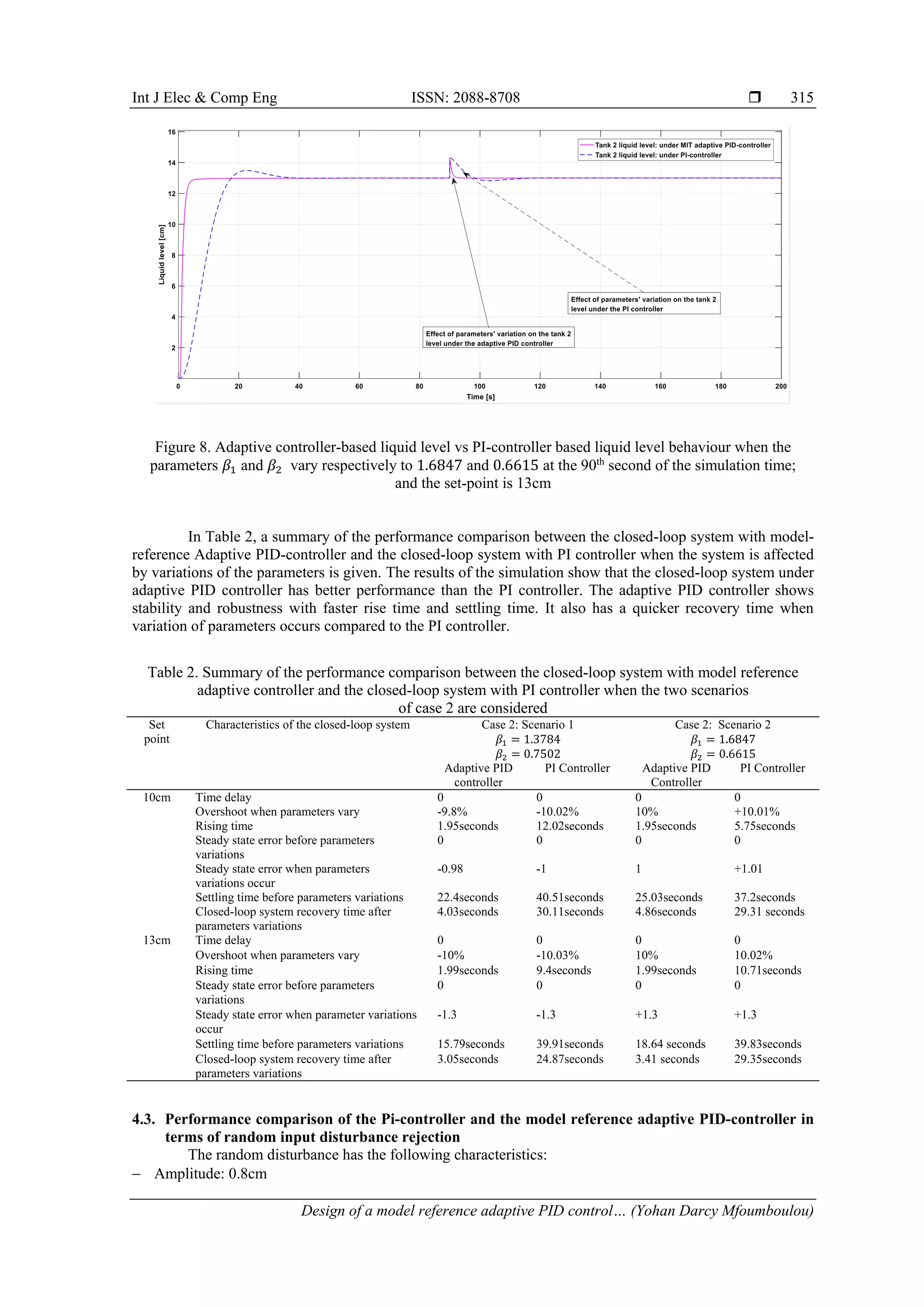
4.4. Analysis of the design specification achievement
In the previous sections, the two-tank liquid level system is subjected to parameters’ variation and
random input disturbances, both are applied to the closed-loop system in different conditions.
The various simulations of the two-tank liquid level process reveal the following observations:
The adaptive PID controller and the system adapt to the changes of plant parameters.
The adaptive PID controller and the system reject random input disturbances.
The stability of the system is achieved.
The error signals go to zero.
The plant output always follows the reference model and the set-points trajectories regardless of the
bounded values of the varying parameters, and the introduction of random input disturbances.
5. CONCLUSION
In this paper, the first contribution is the design and derivation of the Adaptive PID controller based
on the MIT approach. Then, the performances of a standard PI controller designed on MATLAB and a new
model reference adaptive PID controller designed based on MIT technique are compared for a two-tank
process subjected to parameters variations and disturbances. The model reference adaptive PID controller can
stabilize the closed-loop system when variations of parameters occur at a speed eight times faster than the
conventional PI controller, which is a significant improvement.
The designed model reference adaptive PID controller showed outstanding performances and is
recommended as control method to be used for the stabilization of the closed-loop system subjected to
internal parameters variations and external random disturbances. For future research, the algorithm can be
improved to implement multiple model reference methodologies in real-time to push the boundaries of
the control algorithm.
REFERENCES
[1] J. Slotine, “Applied Nonlinear Control,” Prentice Hall, New Jersey, 1991.
[2] S. Coman, “Model Reference Adaptive Control for a Dc Electrical Drive,” Bulletin of the Transilvania University
of Brasov. Engineering Sciences. Series, vol. 6, no. 2, 2013.
[3] M. A Fellani and A. M. Gabaj, “PID Controller Design for Two Tanks Liquid Level Control System Using
Matlab,” International Journal of Electrical and Computer Engineering (IJECE), vol. 3, no. 3, pp. 436-442, 2015.](https://image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-18-2048.jpg)
![ ISSN: 2088-8708
Int J Elec & Comp Eng, Vol. 11, No. 1, February 2021 : 300 - 318
318
[4] P. Swarnkar, et al., “Effect of Adaptation Gain in Model Reference Adaptive Controlled Second Order System,”
Engineering, Technology & Applied Science Research, vol. 1, no. 3, pp. 70-75 2011.
[5] J. Vojtesek, et al., “Simulation of 1DOF and 2DOF adaptive control of the water tank model,” Proceedings - 29th
European Conference on Modelling and Simulation (ECMS), 2015.
[6] M. Navabi and H. Mirzaei, “Robust Optimal Adaptive Trajectory Tracking Control of Quadrotor Helicopter,” Latin
American Journal Solids and Structures, vol. 14, pp. 1040-1063, 2017.
[7] G. Nandhinipriyanka, et al., “Design of model reference adaptive controller for cylinder tank system,” International
Journal of Pure and Applied Mathematics, vol. 118, no. 20, 2018.
[8] M. S. Minhat, et al., “Adaptive control method for core power control in TRIGA Mark II reactor,” IOP Conference
Series: Materials Science and Engineering, 2018.
[9] M. H. A. Jalil, et al., “Model Reference Adaptive Controller without Integral (MRACWI) for Position Control of a
DC Motor,” Applications of modelling and simulation, vol. 3, pp. 18-27, 2019.
[10] A. N. K. Nasir, et al., “Performance comparison between sliding mode control (SMC) and PD-PID controllers
for a nonlinear inverted pendulum system,” World Academy of Science, Engineering and Technology, vol. 71,
pp. 400-405, 2010.
[11] A. Soltan, et al., “Fractional order PID system for supressing epileptic activities,” IEEE International Conference
on Applied System Invention (ICASI), pp. 338-341, 2018.
[12] M. A. Ahmad and R. R. Ismail, “A data-driven sigmoid-based PI controller for buck-converter powered DC
motor,” IEEE Synposium on Computer Applications and Industrial Electronics (ISCAIE), pp. 81-86, 2017.
[13] H. Senberber and A. Bagis, “Fractional PID controller design for fractional order systems using ABC algorithm,”
IEEE Electronics, pp. 1-7, 2017.
[14] M. R. B. Ghazali, et al., “Adaptive safe experimentation dynamics for data-driven neuroendocrine-PID control of
MIMO systems,” IETE Journal of Research, pp. 1-14, 2019.
[15] Y. D. Mfoumboulou and R. Tzoneva, “Development of a Model Reference Digital Adaptive Control Algorithm for
a Linearized Model of a Nonlinear Process,” International Journal of Applied Engineering Research, vol. 13,
no. 23, pp. 16662-16675, 2018.
[16] N. Winston, et al., “Design and performance comparison of different adaptive control schemes for pitch angle
control in a twin–rotor MIMO system,” International Journal of Electrical and Computer Engineering (IJECE),
vol. 9, no. 5, pp. 4114-4129, 2019.
[17] K. J. Astrom and B. Wittenmark, “Adaptive Control,” Second Edition, Dover Publications, 2008.
[18] N. Nise, “Control Systems Engineering Eighth Edition,” John Wiley & Sons, Limited, 2019.
[19] K. Ogata, “Modern Control Engineering Fourth Edition,” Upper Saddle River, New Jersey, Prentice Hall, 2002.
[20] Y. D Mfoumboulou, “Development of nonlinear control algorithms for implementation in distributed system,”
Master Thesis, Cape Peninsula University of Technology, 2014.
[21] MathWorks, “Control System toolbox user’s guide 2016a,” The MathWorks, Inc., 2016.
[22] A.B. Campo, “PID Control Design,” MATLAB - A Fundamental Tool for Scientific Computing and Engineering
Applications, vol. 1, pp. 3-18, 2012.
[23] S. Coman and C. Boldisor, “Adaptive Pi Controller Design to Control a Mass - Damper - Spring Process,” Bulletin
of the Transilvania University of Brasov, vol. 7, no. 2, 2014.
[24] T. Basten, et al., “Model-Based Design of Adaptive Embedded Systems,” Model-based design of adaptive
embedded systems. Verlag London: Springer, vol. 22, 2013.
[25] E. Kurniawan, et al., “Model-Based Control for Tracking and Rejection of Periodic Signals,” 7th International
Conference on Information Technology and Electrical Engineering (ICITEE), pp. 548-552, 2015.
BIOGRAPHY OF AUTHOR
Dr. Yohan Darcy Mfoumboulou is a post doctorate fellow at Cape Peninsula University of
Technology (CPUT). His research interests are in the fields of Classical and Modern Control,
Advanced Nonlinear Control, Real-Time Distributed Control Systems, Linear and Nonlinear
Adaptive Networked Control, Digital Adaptive Control and Process Control and
Instrumentation.](https://image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-19-2048.jpg)
![International Journal of Electrical and Computer Engineering (IJECE)
Vol. 11, No. 1, February 2021, pp. 300~318
ISSN: 2088-8708, DOI: 10.11591/ijece.v11i1.pp300-318 300
Journal homepage: http://ijece.iaescore.com
Design of a model reference adaptive PID control algorithm
for a tank system
Yohan Darcy Mfoumboulou
Departement of Electrical, Electronic, and Computer Engineering,
Cape Peninsula University of Technology, South Africa
Article Info ABSTRACT
Article history:
Received Mar 31, 2020
Revised Jun 20, 2020
Accepted Jul 6, 2020
This paper describes the design of an adaptive controller based on model
reference adaptive PID control (MRAPIDC) to stabilize a two-tank process
when large variations of parameters and external disturbances affect
the closed-loop system. To achieve that, an innovative structure of
the adaptive PID controller is defined, an additional PI is designed to make
sure that the reference model produces stable output signals and three
adaptive gains are included to guarantee stability and robustness of
the closed-loop system. Then, the performance of the model reference
adaptive PID controller on the behaviour of the closed-loop system is
compared to a PI controller designed on MATLAB when both
closed-loop systems are under various conditions. The results demonstrate
that the MRAPIDC performs significantly better than the conventional
PI controller.
Keywords:
Adaptive
Linearization
MIT
MRAPIDC
Nonlinear
Parameters
Stability
This is an open access article under the CC BY-SA license.
Corresponding Author:
Yohan Darcy Mfoumboulou,
Departement of Electrical, Electronic and Computer Engineering,
Cape Peninsula University of Technology,
Bellville Campus, P.O Box 7530, South Africa.
Email: fabolous86yo@yahoo.fr
1. INTRODUCTION
Adaptive control of uncertain processes has become more and more important in industry. Adaptive
controllers differ from ordinary ones, because their parameters are variable, and there is a mechanism for
adjusting these parameters online based on signals in the system [1]. The design of an adaptive PI controller
to stabilize a mass damper-spring system under parameters’ uncertainties was proposed in [2]. The designed
adaptive PI controller adjusts to parameters’ variations, and the output of the process follows the set points,
regardless of the values of the parameters. But it does not guarantee stability when external disturbances and
large variations of parameters occur.
In [3], the design of a PID controller on MATLAB to maintain the level of liquid constant in
a coupled-tank system (CTS) was proposed. The control parameters were found using the trial and error
methodology and the results were analysed in MATLAB/Simulink environments. Proportional (P),
proportional integral (PI), proportional derivative (PD) and proportional integral derivative (PID) controllers
were applied on the process and their performances were compared to select the most suitable control
solution. The PID controller showed superior results, but it did not guarantee stability to disturbances and
variations of plant parameters.
Adaptive controllers, as opposed to conventional constant gain controllers (PID controllers),
are very effective in handling situations where the variations of parameters and environmental changes are
very frequent with the application of model reference adaptive control scheme in a first order system [4].](https://crownmelresort.com/image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-1-2048.jpg)
![Int J Elec & Comp Eng ISSN: 2088-8708
Design of a model reference adaptive PID control… (Yohan Darcy Mfoumboulou)
301
They noticed that the newer adaptive control schemes could not cope with drastic changes in loads, inertias
and forces, unpredictable and sudden faults, or frequent, or unforeseen disturbances. Most conventional PID
controllers with constant gain were also unable to cope with these problems. For this reason, the authors
developed a control technique to solve these problems and added an adaptation gain to show the effects on
the system performance.
An adaptive control algorithm of a water tank model was simulated in [5]. It was concluded that,
compared to the one degree of freedom (1DOF) algorithm, the two degrees of freedom algorithm (2DOF)
reduced the control input demands, which was important from the practical point of view. But the 2DOF had
slower output response compared to the 1DOF.
A robust optimal adaptive control strategy was developed in [6] to deal with tracking problem of
a quadrotor unmanned aerial vehicle (UAV). The controller has a prominent ability to stabilize nonlinear
dynamic system of quadrotor, force the states to follow desired reference signals, and find optimal solution
for the tracking problem without control input saturation. The performance analysis of a conventional PID
controller and a MRAC was done in [7]. Cylindrical tank interacting and noninteracting systems were
selected as processes to be controlled. The results showed that the MRAC has better overshoot, settling time
and set-point tracking performance than the conventional PID controller.
The development of direct and indirect adaptive control methods to control the power in a TRIGA
MARK II reactor was proposed in [8]. The analysis showed that the adaptive algorithm offers overall better
results than the feedback control algorithm. The adaptive algorithm reduced the settling time up to 25% of
the nominal settling time.
A model reference adaptive controller without integral (MRACWI) parameter for position control of
a DC Motor was designed in [9]. The controller produced better performance in terms of settling time,
percentage overshoot and mean square error as compared with PID controller, standard MRAC and MRAC
with a sigma modification. A drawback of this algorithm is that its performance to variations of parameters
and external disturbances is unknown.
A comparison of the time specification performance between a conventional PID controller and
a modern sliding mode controller (SMC) for a nonlinear inverted pendulum system was done in [10].
The performances of both control strategies were assessed to see which one had better handling of
pendulum’s angle and cart’s position. The overall results of the analysis showed that the sliding mode
controller had faster rising time, better settling time and a much better percentage of overshoot compared to
the conventional PID. Both controllers did not have any steady state errors. Since the inverted pendulum is
a highly nonlinear system, this research showed two drawbacks. The authors did not investigate
the performance of the controllers when external disturbances and variations of parameters occur. These
studies would have made the investigation more realistic.
Advanced PID are also used in the medical sector, [11] proposed a fractional order PID controller
and an integer order PID controller for supressing epileptic activities. Both controllers showed great results to
stabilize the patient, but the fractional order PID controller is more suitable for implementation in FPGA
because it uses less flip-flops. Unfortunately, the study did not take in consideration sudden abnormal
activities of the brain cells to evaluate the time response taken by the controller to stabilize the patient.
This study is crucial to bring the patient back to a good health condition in the shortest time possible.
In [12], a novel data-driven sigmoid-based PI controller was designed to track the angular velocity
of dc motor powered by a dc/dc buck converter. The results of the investigations showed that the data-driven
sigmoid-based PI, which is tuned using global simultaneous perturbation stochastic approximation, yields
a better angular velocity tracking as compared to conventional PI and PI-Fuzzy. A drawback of this study is
that, the performance of the sigmoid-based controller was not evaluated for disturbance rejection.
In [13], the performance of the fractional order proportional-integral-derivative (FOPID) controllers
designed by using artificial bee colony (ABC) for fractional orders systems is compared to conventional PID
controller optimized by the ABC colony algorithm. The results of the simulations showed that the FOPID
controllers had significantly better performance compared to the conventional PID controllers. Unfortunately,
there was no study made to evaluate the performance of the controller when disturbances occur.
An adaptive safe experimentation dynamics (ASED) for data driven neuroendocrine-PID control of
MIMO Systems was designed in [14]. The performance of the ASED based method was compared to
the standard safe experimentation dynamics (SED) and simultaneous perturbation stochastic approximation
(SPSA) based methods. The results of the simulations showed that the ASED and SED based methods have
successfully solved the unstable convergence issue in the existing neuroendocrine-PID based standard SPSA.
Moreover, the presented ASED based algorithm outperforms the SED and the SPSA based methods in
the perspective of the control performance accuracy in terms of lower objective function, total norm error and
total norm input. A drawback of this research is that, the authors did not perform plant’s parameters changes
to see the influence of the adaptive gain of the ASED controller. The research gap and merit of the adaptive](https://crownmelresort.com/image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-2-2048.jpg)
![ ISSN: 2088-8708
Int J Elec & Comp Eng, Vol. 11, No. 1, February 2021 : 300 - 318
302
PID controller developed in this paper compared to the other advanced PID controllers reviewed is that,
the proposed controller can stabilize the closed-loop system when variations of parameters and sudden
random disturbances occur simultaneously. None of the reviewed papers explored this scenario.
The main contribution of this paper is that it presents the design of a model reference adaptive PID
controller (MRAPIDC) based on the MIT approach to stabilize and optimize the linearized model of the two-
tank liquid level process affected by sudden changes of parameters and input disturbance. Then, a reference
model is developed based on control theory, and a PI regulator is designed on MATLAB to control
the reference model. The designed PI controller is a novel idea to add stability to the output signals of
the reference model, hence making the adaptive algorithm more robust. Another novelty of this research is
the inclusion of three new adaptive gains in the final structure of the MRAPIDC to make the closed-loop
system robust when large variations of parameters and sudden external disturbances occur simultaneously.
The controller keeps the percentage of overshoot of the closed-loop system below 10% and its recovery time
to sudden variations of parameters is lower than 5 seconds, which is a huge advantage compared to the other
adaptive controllers reviewed. Another advantage of this adaptive algorithm is that real-time tuning of
the three adaptive gains can be done to improve the performance of the closed-loop system. Furthermore,
the performance of the MRAPIDC is compared to a classic PI controller designed on MATLAB for
the linearized model of the two-tank system. The adaptive control algorithms, PI control algorithm and
the models of the closed-loop systems are simulated in MATLAB/Simulink.
The outline of this paper is as follows: the modelling and simulation of the process is proposed in
section 2. Section 3 discusses the design of a MRAPIDC based on model reference theory. The simulation
results are shown in section 4. Section 5 draws the conclusion.
2. MODELING AND SIMULATION OF THE TWO-TANK SYSTEM
In this paper, a two-tank liquid level system is selected as a plant to be controlled, because it is
a nonlinear inherently unstable system. The system is made of two-tank mounted above a reservoir, which
has the function of a storage element for liquid. The system has an independent pump to pump liquid from
the reservoir to the tanks. The two-tanks are interacting, which means that the liquid moves from one tank to
the other. When two tanks are state dependent, the interaction of liquid between the tanks exhibits a nonlinear
behaviour [15]. The simplified block diagram of the process is shown in Figure 1.
Figure 1. Block diagram of a two-tank liquid level process
The parameters of the two-tank liquid level system are the following:
ℎ1 = level of liquid in tank 1 in 𝑐𝑚
ℎ2 = level of liquid in tank 2 in 𝑐𝑚
𝐴1 = cross sectional area of tank 1 in 𝑐𝑚2](https://crownmelresort.com/image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-3-2048.jpg)
![Int J Elec & Comp Eng ISSN: 2088-8708
Design of a model reference adaptive PID control… (Yohan Darcy Mfoumboulou)
303
𝐴2 = cross sectional area of tank 2 in 𝑐𝑚2
𝑎1 = cross sectional area of the outlet pipe in tank 1 in 𝑐𝑚2
𝑎2 = cross sectional area of the outlet pipe in tank 2 in 𝑐𝑚2
𝑄𝑖𝑛 = flow rate of liquid into tank 1 𝑐𝑚2
/𝑠𝑒𝑐
𝑄𝑜𝑢𝑡 = flow rate of liquid out of tank 2 𝑐𝑚2
/𝑠𝑒𝑐
𝛽1 = valve ratio of outlet pipe of tank 1
𝛽2 = valve ratio of the outlet pipe of tank 2
g = gravitational force
k = pump gain
u (t) = input voltage to the pump
The nonlinear equations of the two-tank liquid system model can be derived by applying
the Bernoulli’s law of conservation of mass [15]:
(1)
The nonlinear dynamic equations derived from tank 1 are:
(2)
(input flow)
(3)
The dynamic equations derived from tank 2 are:
(4)
(5)
At equilibrium for a continuous liquid level set-point, the derivative of the liquid levels in the tanks
must be zero ( ). In the scenario when: ; the system is state decoupled. Therefore,
to satisfy the conditions of the simulation of the liquid level system: , the level of liquid in tank 1
must be bigger than this of tank 2.
The state space representation of the nonlinear system is the following:
(6)
(7)
Then:
)
(
0
)
(
2
)
(
2
)
(
2
)
(
)
(
1
2
2
2
2
1
2
1
1
1
1
1
1
2
1
t
u
A
k
t
gh
A
a
t
h
g
A
a
t
h
g
A
a
dt
t
dh
dt
t
dh
(8)
out
in Q
Q
dt
dh
A
)
(
2
)
(
1
1
1
1
1 t
gh
a
Q
dt
t
dh
A in
in
Q
t
u
)
(
)
(
2
)
(
[
1
)
(
1
1
1
1
1
t
gh
a
t
ku
A
dt
t
dh
)
(
2
)
(
2
)
(
2
2
2
1
1
1
2
2 t
gh
a
t
gh
a
dt
t
dh
A
)
(
2
)
(
2
)
(
2
2
2
2
1
2
1
1
2
t
gh
A
a
t
gh
A
a
dt
t
dh
0
2
.
1
.
h
h 2
1 h
h
2
1 h
h
)
(
2
)
(
2
1
)
(
)
(
1
)
(
)
(
2
2
2
1
1
1
2
1
1
1
1
2
1
t
gh
a
t
gh
a
A
t
h
a
t
ku
A
dt
t
dh
dt
t
dh
T
T
h
h
h
h
C
y 2
1
2
1 1
0
](https://crownmelresort.com/image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-4-2048.jpg)
![ ISSN: 2088-8708
Int J Elec & Comp Eng, Vol. 11, No. 1, February 2021 : 300 - 318
304
The parameters of the two-tank process are given in Table 1.
Table 1. Values of the parameters of the process
Parameters Values
75
1.5
1.5315195
0.6820043
981
30.0024
The next section is to derive a linearized model of the nonlinear tank process to find an accurate equivalence
of both models.
2.1. Linearization of the nonlinear model of the two-tank process
The linearization of the two-tank liquid system is performed around its operating points, and to
achieve that, only the linear terms of the Taylor series expansion of the nonlinear model are considered.
In (7) and (8) are considered to linearize the nonlinear model of the system.
Let define the state variables of the system:
ℎ1 = 𝑥1 = level of liquid in tank 1.
ℎ2 = 𝑥2 = level of liquid in tank 2.
By substituting ℎ1 and ℎ2, by 𝑥1 and 𝑥2 in (7) and (8), it is obtained:
[
𝑥
.
1
𝑥
.
2
] = [
−
𝛽1𝑎1
𝐴1
√2𝑔𝑥1
𝛽1𝑎1
𝐴2
√2𝑔𝑥1 −
𝛽2𝑎2
𝐴2
√2𝑔𝑥2
] + [
𝑘
𝐴1
0
] 𝑢 (9)
𝑦 = 𝐶[𝑥1 𝑥2]𝑇
= [0 1][𝑥1 𝑥2]𝑇
(10)
The (9) and (10) can be expressed by the standard nonlinear model:
𝑥
.
= 𝑓(𝑥) + 𝑔(𝑥)𝑢 = [
𝑓1(𝑥)
𝑓2(𝑥)
] + [
𝑔1(𝑥)
𝑔2(𝑥)
] 𝑢 (11)
𝑦 = 𝑜(𝑥) (12)
where: 𝑓(𝑥), 𝑔(𝑥) and 𝑜(𝑥) are the nonlinear vector functions of the state vector.
The linearization of the nonlinear model is performed according to Taylor series method.
The linearized model is derived based of the nonlinear functions 𝑓1 ,𝑓2, 𝑔1 and 𝑔2 . For the case of the two-
tank system, the nonlinear functions are:
𝑓1 = −
𝛽1𝑎1
𝐴1
√2𝑔𝑥1, 𝑔1 =
𝑘
𝐴1
𝑢 (13)
𝑓2 =
𝛽1𝑎1
𝐴2
√2𝑔𝑥1 −
𝛽2𝑎2
𝐴2
√2𝑔𝑥2, 𝑔2 = 0 (14)
The derivatives of the first function 𝑓1 according to the two states 𝑥1, 𝑥2 and the control input 𝑢:
𝜕
𝜕𝑥1
(𝑓1) =
𝜕
𝜕𝑥1
[−
𝛽1𝑎1
𝐴1
√2𝑔𝑥1]
T
T
h
h
h
h
C
y 2
1
2
1 1
0
)
(
, 2
2
1 cm
A
A
)
(
, 2
1
2 cm
a
a
1
2
)
sec
( 2
cm
g
k](https://crownmelresort.com/image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-5-2048.jpg)
![Int J Elec & Comp Eng ISSN: 2088-8708
Design of a model reference adaptive PID control… (Yohan Darcy Mfoumboulou)
305
𝜕
𝜕𝑥1
(𝑓1) = −
𝑔𝛽1𝑎1
𝐴1√2𝑔𝑥1
(15)
Then:
𝜕
𝜕𝑥2
(𝑓1) =
𝜕
𝜕𝑥2
[−
𝛽1𝑎1
𝐴1
√2𝑔𝑥1]
𝜕
𝜕𝑥2
(𝑓1) = 0 (16)
The derivative according to 𝑢 is:
𝜕
𝜕𝑢
(𝑓1) = 0 (17)
Derivatives of the second function 𝑓2 according to the two states are:
𝜕
𝜕𝑥1
(𝑓2) =
𝜕
𝜕𝑥1
[
𝛽1𝑎1
𝐴2
√2𝑔𝑥1]
𝜕
𝜕𝑥1
(𝑓2) =
𝑔𝛽1𝑎1
𝐴2√2𝑔𝑥1
(18)
𝜕
𝜕𝑥2
(𝑓2) =
𝜕
𝜕𝑥2
[
𝛽1𝑎1
𝐴2
√2𝑔𝑥1 −
𝛽2𝑎2
𝐴2
√2𝑔𝑥2]
𝜕
𝜕𝑥2
(𝑓2) = −
𝑔𝛽2𝑎2
𝐴2√2𝑔𝑥2
(19)
The terms of the control matrix B can also be found with the same procedure:
Derivative of 𝑔1 per the two states:
𝜕
𝜕𝑥1
(𝑔1) =
𝜕
𝜕𝑥1
[
𝑘
𝐴1
]
𝜕
𝜕𝑥1
(𝑔1) = 0 (20)
For 𝑥2:
𝜕
𝜕𝑥2
(𝑔1) =
𝜕
𝜕𝑥2
[
𝑘
𝐴1
]
𝜕
𝜕𝑥2
(𝑔1) = 0 (21)
Derivative of 𝑔2 according to the two states:
𝜕
𝜕𝑥1
(𝑔2) = 0 (22)
𝜕
𝜕𝑥2
(𝑔2) = 0 (23)
After all the linearized expressions of the system are done, the linearized state space representation
of the two-tank process is:
[
𝑥
.
1
𝑥
.
2
] = [
−
𝑔𝛽1𝑎1
𝐴1√2𝑔𝑥1
0
𝑔𝛽1𝑎1
𝐴2√2𝑔𝑥1
(−
𝑔𝛽2𝑎2
𝐴2√2𝑔𝑥2
)
] [
𝑥1
𝑥2
] + [
𝑘
𝐴1
0
] 𝑢 (24)
𝑦 = [0 1] [
𝑥1
𝑥2
]](https://crownmelresort.com/image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-6-2048.jpg)
![ ISSN: 2088-8708
Int J Elec & Comp Eng, Vol. 11, No. 1, February 2021 : 300 - 318
306
where the coefficients of the matrices defined in (24) are calculated for the equilibrium values of the state
variables given by (6) and (7). At equilibrium for continuous liquid level set-point, the derivative must be
zero (ℎ1
̇ = ℎ2
̇ = 0). In the scenario when: ℎ1 = ℎ2, the system is state decoupled. Therefore, to satisfy
the conditions of the simulation of the liquid level system: ℎ1 > ℎ2. The model defined by (6) and (7) will be
used to develop the adaptive control algorithm.
3. DESIGN OF A MODEL-REFERENCE ADAPTIVE PID-CONTROLLER
The Massachusetts Institute of Technology (MIT) rule is a gradient rule. It was derived at MIT in its
instrumentation laboratory, hence its name. The MIT rule is the original approach to model reference
adaptive control (MRAC) [15, 16]. To give a representation of the MIT rule, let consider 𝜃 as an adjustable
parameter of a controller. The desired closed-loop response of the output is 𝑦𝑚; and the error between
the output 𝑦 of the closed-loop system and the output 𝑦𝑚 of the refrerence model is ε. In the paper,
the desired output 𝑦𝑚 is proposed to be determined by a reference model output. To define the MIT rule,
let consider the following loss function [17]:
𝐽(𝜃) =
1
2
𝜀2
(25)
It is necessary to determine at every moment of time the parameters of the controller in such a way that the
function 𝐽(𝜃) is minimized.
The MIT fundamental approach consists of adjusting the parameters of the closed-loop system such
that the loss function described in (25) is minimized. To minimize the function 𝐽(𝜃), a realistic approach
would be to change the parameters of the system in the direction of the negative gradient of 𝐽:
𝑑𝜃
𝑑𝑡
= −𝛾
𝜕𝐽
𝜕𝜃
= −𝛾𝜀 (
𝜕𝜀
𝜕𝜃
) (26)
where: 𝛾 is an adaptation gain; and (
𝜕𝜀
𝜕𝜃
) is the sensitivity derivative function of the system towards its time-
varying parameters. 𝜃 represents in this case, the time varying parameters of the controller.
In (26) is the MIT rule. The sensitivity derivative expresses how the adjustable parameters influence
the error. In general, it is assumed that the parameter changes are slower than the other variables of
the system. Hence, the sensitivity derivative (
𝜕𝜀
𝜕𝜃
) can be evaluated by assuming that the adjustable parameter
𝜃 is constant. To summarize, the following steps can be used to design an adaptive controller based on
the MIT rule:
Define the coefficients of the transfer function of a plant with unknown parameters.
Choose a reference model.
Choose a control algorithm to achieve perfect model tracking.
Define the error of the closed-loop system.
Derive the expressions of the control parameters.
Apply the negative gradient of 𝐽 to find the updating parameters.
3.1. Determination of the transfer function coefficients for the linearized model
The state space representation of the tank process is represented as given in (24):
[
𝑥
.
1
𝑥
.
2
] = [
−
𝑔𝛽1𝑎1
𝐴1√2𝑔𝑥1
0
𝑔𝛽1𝑎1
𝐴2√2𝑔𝑥1
(−
𝑔𝛽2𝑎2
𝐴2√2𝑔𝑥2
)
] [
𝑥1
𝑥2
] + [
𝑘
𝐴1
0
] 𝑢
𝑦 = [0 1] [
𝑥1
𝑥2
]
To make mathematical calculations much simpler, (24) is rewritten as:
[
𝑥̇1
𝑥̇2
] = [
𝑇11 0
𝑇21 𝑇22
] [
𝑥1
𝑥2
] + [
𝑘
𝐴1
0
] 𝑢
𝑦 = [0 1] [
𝑥1
𝑥2
]](https://crownmelresort.com/image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-7-2048.jpg)
![Int J Elec & Comp Eng ISSN: 2088-8708
Design of a model reference adaptive PID control… (Yohan Darcy Mfoumboulou)
307
where:
𝑇11 = −
𝑔𝛽1𝑎1
𝐴1√2𝑔𝑥1
; 𝑇21 =
𝑔𝛽1𝑎1
𝐴2√2𝑔𝑥1
; 𝑇22 = −
𝑔𝛽2𝑎2
𝐴2√2𝑔𝑥2
The matrices of the state space model can be represented as:
𝐴 = [
𝑇11 0
𝑇21 𝑇22
] ; 𝐵 = [
𝑘
𝐴1
0
]; 𝐶 = [0 1]; and 𝐷 = 0.
To transform the state space model of the linearized system to transfer function, the following
formula is applied [18]:
𝑇𝑓(𝑠) =
𝑁(𝑠)
𝑃(𝑠)
= 𝐶(𝑠𝐼 − 𝐴)−1
𝐵 + 𝐷
where I is the identity matrix, and:
𝑠𝐼 = [
𝑠 0
0 𝑠
]
The calculation of the transfer function of the linearized model is the following:
𝑇𝑓(𝑠) = [0 1] × ([
𝑠 0
0 𝑠
] − [
𝑇11 0
𝑇21 𝑇22
])
−1
× [
𝑘
𝐴1
0
]
𝑇𝑓(𝑠) = [0 1] × ([
(𝑠 − 𝑇11) 0
−𝑇21 (𝑠 − 𝑇22)
])
−1
× [
𝑘
𝐴1
0
]
Then:
𝑇𝑓(𝑠) = [0 1] × [
𝑎𝑑𝑗 [
(𝑠 − 𝑇11) 0
−𝑇21 (𝑠 − 𝑇22
]
|
(𝑠 − 𝑇11) 0
−𝑇21 (𝑠 − 𝑇22)
|
] × [
𝑘
𝐴1
0
]
𝑇𝑓(𝑠) = [0 1] ×
[
[
(𝑠 − 𝑇22) 0
𝑇21 (𝑠 − 𝑇11)
]
[𝑠2 + (−𝑇11 − 𝑇22)𝑠 + 𝑇11𝑇22]
]
× [
𝑘
𝐴1
0
]
𝑇𝑓(𝑠) = [0 1] ×
[
[
(𝑠 − 𝑇22) × (
𝑘
𝐴1
)
𝑇21 (
𝑘
𝐴1
)
]
[𝑠2 + (−𝑇11 − 𝑇22)𝑠 + 𝑇11𝑇22]
]
𝑇𝑓(𝑠) = [
(𝑜) × (𝑠 − 𝑇22) × (
𝑘
𝐴1
) + (1) × 𝑇21 (
𝑘
𝐴1
)
[𝑠2 + (−𝑇11 − 𝑇22)𝑠 + 𝑇11𝑇22]
]
The final representation of the transfer function of the linearized model is:](https://crownmelresort.com/image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-8-2048.jpg)
![ ISSN: 2088-8708
Int J Elec & Comp Eng, Vol. 11, No. 1, February 2021 : 300 - 318
308
𝑇𝑓(𝑠) =
𝑇21 (
𝑘
𝐴1
)
𝑠2 + (−𝑇11 − 𝑇22)𝑠 + 𝑇11𝑇22
The design of the model reference adaptive PID controller to stabilize the developed linearized model is
described in the next section.
3.2. Procedure to design the model-reference adaptive PID-controller (MRAPIDC) for the linearized
model of the two-tank liquid level system
To make the derivation of the adaptive PID controller much simpler mathematically, the final
expression of the transfer function of the linearized model is simplified as:
𝐺(𝑠) =
𝑎3
𝑎0𝑠2 + 𝑎1𝑠 + 𝑎2
where:
𝑇𝑓(𝑠) = 𝐺(𝑠); 𝑎0 = 1; 𝑎1 = (−𝑇11 − 𝑇22); 𝑎2 = 𝑇11𝑇22 𝑎3 = 𝑇21 (
𝑘
𝐴1
)
The parameters of the new transfer function are defined as:
𝑎1 = 𝜃1𝑙1, 𝑎2 = 𝜃2𝑙2 and 𝑎3 = 𝜃3𝑙3.
𝜃1, 𝜃2 and 𝜃3 are the varying parameters; and 𝑙1, 𝑙2 and 𝑙3 are the fixed parameters of the process.
3.2.1. Design of the desired linear reference model
The linearized model of the tank system is of a second order. Therefore, the linear reference model
can be designed as a typical second order transfer function as follows:
From the design specifications, the values of the dominant poles can be obtained as follows:
𝑅(𝑠) =
𝜔𝑛
2
𝑠2+2𝜔𝑛𝜁𝑠+𝜔𝑛
2 =
𝑌𝑚(𝑠)
𝑅𝑖𝑛(𝑠)
(27)
where: 𝑅(𝑠) is the transfer function of the reference model, 𝑌𝑚 is the output of the reference model and 𝑅𝑖𝑛 is
its input.
Then the output of the reference model is:
𝑌𝑚(𝑠) =
𝜔𝑛
2
𝑠2+2𝜁𝜔𝑛𝑠+𝜔𝑛
2 𝑅𝑖𝑛(𝑠) (28)
To guarantee the stability of the closed-loop system, the reference model must meet the following
design characteristics:
Percentage of Overshoot (PO): 8%
Settling time: 2 seconds
T ime delay: 0 second
Steady state error: 0
From the design specifications, the values of the dominant poles can be obtained as follows [19, 20]:
The damping ratio for a percentage of overshoot (PO) of 8% is:
𝜁 = √
(𝑙𝑛
𝑃𝑂
100%
)2
𝜋2+(𝑙𝑛
𝑃𝑂
100%
)2
𝜁 = √
𝑙𝑛( 0.08)2
𝜋2 + 𝑙𝑛( 0.08)2
= 0.63](https://crownmelresort.com/image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-9-2048.jpg)
![Int J Elec & Comp Eng ISSN: 2088-8708
Design of a model reference adaptive PID control… (Yohan Darcy Mfoumboulou)
309
The phase angle of the dominant poles is:
𝜑 = 𝑐𝑜𝑠−1
( 𝜁) = 𝑐𝑜𝑠−1
( 0.63)
𝜑 = 50.95∘
The values of the real and imaginary poles are calculated as follow:
𝑅𝑒 𝑎 𝑙(𝑠) = −
4
𝑇𝑠
= −
4
2𝑠
= −2
𝐼𝑚 𝑎 𝑔(𝑠) = 𝑅𝑒 𝑎 𝑙(𝑠) × 𝑡𝑎𝑛( 𝜑) = −2 𝑡𝑎𝑛( 50.95∘
)
𝐼𝑚 𝑎 𝑔(𝑠) = −2.46𝑖
The value of the first dominant pole is:
𝑃1 = 𝑅𝑒 𝑎 𝑙(𝑠) + 𝐼𝑚 𝑎 𝑔(𝑠)
𝑃1 = −2 − 2.46𝑖
The natural frequency of the reference model is found based on the polynomial of the dominant poles:
𝑃𝑑𝑜𝑚(𝑠) = (𝑠 + 2 + 2.46𝑖)(𝑠 + 2 − 2.46𝑖)
𝑃𝑑𝑜𝑚(𝑠) = 𝑠2
+ 4𝑠 + 10.0516
𝜔𝑛 = √10.0516 = 3.17𝑟𝑎𝑑/𝑠
The desired closed-loop transfer function of the reference model is:
𝑅(𝑠) =
10.0516
𝑠2 + 4𝑠 + 10.0516
To ensure stability and robustness of the closed-loop system when large variations of parameters
occur, a proportional integral (PI) controller is designed on MATLAB for the reference model R(s) using
the programming command line 𝑝𝑖𝑑 (𝐾𝑝, 𝐾𝑖) [21, 22]. The parameters 𝐾𝑝 and 𝐾𝑖 are tunned to find their
optimal values. This additional PI has also the ability to guarantee stability when sudden external
disturbances affecting the two-tank process occur. The parameters of the PI controller are:
𝐾𝑝 = 0.001 and 𝐾𝑖 = 4
The transfer function of the PI controller is the following:
𝐺𝑃𝐼(𝑠) =
𝐾𝑝𝑠 + 𝐾𝑖
𝑠
=
0.001𝑠 + 4
𝑠
3.2.2. Selection of the control algorithm to achieve perfect model tracking
To achieve perfect model tracking, the following proportional integral derivative (PID) control
algorithm is selected for the process as:
𝑢(𝑡) = 𝑘𝑝𝑒(𝑡) + 𝑘𝑖 ∫ 𝑒(𝑡)𝑑𝑡 − 𝑘𝑑 𝑦̇(𝑡) (29)
where: 𝑘𝑝 is the proportional gain; 𝑘𝑖 is the integral gain; 𝑘𝑑 is the derivative gain; 𝑦 is the plant output;
and 𝑒(𝑡) = 𝑟𝑖𝑛(𝑡) − 𝑦(𝑡), with 𝑟𝑖𝑛(𝑡) as the input of the reference model.
The representation of the PID controller in Laplace domain is:
𝑈(𝑠) = 𝐾𝑝𝐸(𝑠) +
1
𝑠
𝐾𝑖𝐸(𝑠) − 𝑠𝐾𝑑𝑌(𝑠) (30)](https://crownmelresort.com/image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-10-2048.jpg)
![ ISSN: 2088-8708
Int J Elec & Comp Eng, Vol. 11, No. 1, February 2021 : 300 - 318
310
The output 𝑌(𝑠) of the two-tank liquid level process can be found as follows:
𝑌(𝑠) = 𝐺(𝑠)𝑈(𝑠) (31)
The substitution of (30) into (31) gives:
𝑌(𝑠) = 𝐺(𝑠) [𝐾𝑝𝐸(𝑠) +
1
𝑠
𝐾𝑖𝐸(𝑠) − 𝑠𝐾𝑑𝑌(𝑠)]
The closed-loop system is:
𝑌(𝑠) = 𝐺(𝑠)𝐸(𝑠) [𝐾𝑝 +
1
𝑠
𝐾𝑖] − 𝑠𝐾𝑑𝑌(𝑠)𝐺(𝑠) (32)
It is known that:
𝐸(𝑠) = 𝑅𝑖𝑛(𝑠) − 𝑌(𝑠)
Then 𝐸(𝑠) is substituted in (32):
𝑌(𝑠) = 𝐺(𝑠)[𝑅𝑖𝑛(𝑠) − 𝑌(𝑠)] [𝐾𝑝 +
1
𝑠
𝐾𝑖] − 𝑠𝐾𝑑𝑌(𝑠)𝐺(𝑠)
𝑌(𝑠) + [𝐾𝑝 +
1
𝑠
𝐾𝑖 + 𝑠𝐾𝑑] 𝐺(𝑠)𝑌(𝑠) = 𝐺(𝑠)𝑅𝑖𝑛(𝑠) [𝐾𝑝 +
1
𝑠
𝐾𝑖]
𝑌(𝑠) [1 + (𝐾𝑝 +
1
𝑠
𝐾𝑖 + 𝑠𝐾𝑑)𝐺(𝑠)] = 𝐺(𝑠)𝑅𝑖𝑛(𝑠) [𝐾𝑝 +
1
𝑠
𝐾𝑖]
𝑌(𝑠) =
[𝑠𝐾𝑝𝐺(𝑠)+𝐾𝑖𝐺(𝑠)]𝑅𝑖𝑛(𝑠)
𝑠2𝐾𝑑𝐺(𝑠)+(1+𝐾𝑝𝐺(𝑠))𝑠+𝐾𝑖𝐺(𝑠)
(33)
The PID coefficients are not known. It is necessary to determine them in such a way that the PID
controller has adaptive behaviour towards the parameters variations of the process to be controlled.
The design of the PID controller is further done in the time domain. In the time domain, (33) can be written
as given in [2-23], because of the following:
The model parameters vary at every moment of time.
The adaptive controller must change its parameters also at every moment of time.
To convert (28) to the time domain, a differential operator is introduced [23]. In (36) represents the
cost function in (25), and 𝜃 = 𝑘𝑝, 𝑘𝑖, 𝑘𝑑.
Following [2-23], the representation of (33) in the time domain is:
)
(
))
(
1
(
)
(
)
(
)
(
)
(
)
( 2
t
g
k
p
t
g
k
t
g
k
p
t
r
t
g
k
t
g
pk
t
y
i
p
d
in
i
p
(34)
where: 𝑝 is a differential operator.
3.2.3. Determination of the error between the plant states and the reference model states
The tracking error of the closed-loop system and the reference model is [24, 25]:
𝜀(𝑡) = 𝑦(𝑡) − 𝑦𝑚(𝑡) (35)
Substituting (28) and (34) in (35) gives:
𝜀(𝑡) =
[𝑝𝑘𝑝𝑔(𝑡)+𝑘𝑖𝑔(𝑡)]𝑟𝑖𝑛(𝑡)
𝑝2𝑘𝑑𝑔(𝑡)+(1+𝑘𝑝𝑔(𝑡))𝑝+𝑘𝑖𝑔(𝑡)
−
𝜔𝑛
2
𝑝2+2𝜁𝜔𝑛𝑝+𝜔𝑛
2 𝑟𝑖𝑛(𝑡) (36)](https://crownmelresort.com/image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-11-2048.jpg)

![ ISSN: 2088-8708
Int J Elec & Comp Eng, Vol. 11, No. 1, February 2021 : 300 - 318
312
4. SIMULATION RESULTS
The Simulink diagram of the closed-loop system with the derived adaptive PID controller is shown
in Figure 2. The simulation is done in MATLAB/Simulink environment. The closed-loop system is made of
the following subsystems:
Plant model represented as a second order transfer function.
Reference model.
Adaptation control algorithms.
Figure 2. Simulink diagram of the adaptive control algorithm based on the MIT rule
The simulations are done to evaluate the performance of the adaptive scheme under the following
parameters:
The set-points are: 10cm and 13cm.
The values of the adaptation gains are: 𝛾𝑝
= 28.5, 𝛾𝑖
= 1.18 × 10−3
and 𝛾𝑑
= −15.
A random disturbance of magnitude 0.8 and frequency 0.1 Hertz occurs at the output of the plant.
𝛽1
(valve ratio of the outlet pipe tank 1) and 𝛽2
(valve ratio of the outlet pipe of tank 2) are unknown, but
their values are bounded to a range of values.
𝛽1
varies within the following interval: [1.22522 1.9895]. The values: 1.3784; 1.5315195; 1.6081 and
1.6847 are selected randomly.
𝛽2
varies within the following interval: [0.545603 0.818405]. The values: 0.5661; 0.6820043; 0.6615
and 0.7502 are randomly selected.
4.1. Case 1: Simulation of the closed-loop adaptive system where there are no variations of
the parameters
The simulation shows the following results:
The graphs of the level of liquid 𝑦 in Tank 2.
𝛽1 (valve ratio of the outlet pipe tank 1) and 𝛽2 (valve ratio of the outlet pipe of tank 2) are at their
original values: 𝛽1 = 1.5315195 and 𝛽2 = 0.6820043.
Simulation results when the set point is 10cm as shown in Figure 3.
Simulation results when the set point is 13cm as shown in Figure 4.
The results of the simulations show that the designed model reference adaptive PID-controller has
excellent tracking performance, good rising time and it does not have any overshoot and steady state error.](https://crownmelresort.com/image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-13-2048.jpg)




![Int J Elec & Comp Eng ISSN: 2088-8708
Design of a model reference adaptive PID control… (Yohan Darcy Mfoumboulou)
317
Figure 11. Adaptive controller-based liquid level vs PI-controller based liquid level when at the 50th
second
of the simulation time; 𝛽1 and 𝛽2 vary respectively from their original values to: 1.6081 and 0.5661,
at the same time a random input disturbance occurs and both remain unchanged till the end of the simulation;
the set-point is 13cm
The results of the simulation show that the adaptive PID controller is robust to parameters’
variations and rejects input disturbance, while the conventional PI controller shows an unstable convergence
behaviour. The performance of the adaptive PID controller is outstanding.
4.4. Analysis of the design specification achievement
In the previous sections, the two-tank liquid level system is subjected to parameters’ variation and
random input disturbances, both are applied to the closed-loop system in different conditions.
The various simulations of the two-tank liquid level process reveal the following observations:
The adaptive PID controller and the system adapt to the changes of plant parameters.
The adaptive PID controller and the system reject random input disturbances.
The stability of the system is achieved.
The error signals go to zero.
The plant output always follows the reference model and the set-points trajectories regardless of the
bounded values of the varying parameters, and the introduction of random input disturbances.
5. CONCLUSION
In this paper, the first contribution is the design and derivation of the Adaptive PID controller based
on the MIT approach. Then, the performances of a standard PI controller designed on MATLAB and a new
model reference adaptive PID controller designed based on MIT technique are compared for a two-tank
process subjected to parameters variations and disturbances. The model reference adaptive PID controller can
stabilize the closed-loop system when variations of parameters occur at a speed eight times faster than the
conventional PI controller, which is a significant improvement.
The designed model reference adaptive PID controller showed outstanding performances and is
recommended as control method to be used for the stabilization of the closed-loop system subjected to
internal parameters variations and external random disturbances. For future research, the algorithm can be
improved to implement multiple model reference methodologies in real-time to push the boundaries of
the control algorithm.
REFERENCES
[1] J. Slotine, “Applied Nonlinear Control,” Prentice Hall, New Jersey, 1991.
[2] S. Coman, “Model Reference Adaptive Control for a Dc Electrical Drive,” Bulletin of the Transilvania University
of Brasov. Engineering Sciences. Series, vol. 6, no. 2, 2013.
[3] M. A Fellani and A. M. Gabaj, “PID Controller Design for Two Tanks Liquid Level Control System Using
Matlab,” International Journal of Electrical and Computer Engineering (IJECE), vol. 3, no. 3, pp. 436-442, 2015.](https://crownmelresort.com/image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-18-2048.jpg)
![ ISSN: 2088-8708
Int J Elec & Comp Eng, Vol. 11, No. 1, February 2021 : 300 - 318
318
[4] P. Swarnkar, et al., “Effect of Adaptation Gain in Model Reference Adaptive Controlled Second Order System,”
Engineering, Technology & Applied Science Research, vol. 1, no. 3, pp. 70-75 2011.
[5] J. Vojtesek, et al., “Simulation of 1DOF and 2DOF adaptive control of the water tank model,” Proceedings - 29th
European Conference on Modelling and Simulation (ECMS), 2015.
[6] M. Navabi and H. Mirzaei, “Robust Optimal Adaptive Trajectory Tracking Control of Quadrotor Helicopter,” Latin
American Journal Solids and Structures, vol. 14, pp. 1040-1063, 2017.
[7] G. Nandhinipriyanka, et al., “Design of model reference adaptive controller for cylinder tank system,” International
Journal of Pure and Applied Mathematics, vol. 118, no. 20, 2018.
[8] M. S. Minhat, et al., “Adaptive control method for core power control in TRIGA Mark II reactor,” IOP Conference
Series: Materials Science and Engineering, 2018.
[9] M. H. A. Jalil, et al., “Model Reference Adaptive Controller without Integral (MRACWI) for Position Control of a
DC Motor,” Applications of modelling and simulation, vol. 3, pp. 18-27, 2019.
[10] A. N. K. Nasir, et al., “Performance comparison between sliding mode control (SMC) and PD-PID controllers
for a nonlinear inverted pendulum system,” World Academy of Science, Engineering and Technology, vol. 71,
pp. 400-405, 2010.
[11] A. Soltan, et al., “Fractional order PID system for supressing epileptic activities,” IEEE International Conference
on Applied System Invention (ICASI), pp. 338-341, 2018.
[12] M. A. Ahmad and R. R. Ismail, “A data-driven sigmoid-based PI controller for buck-converter powered DC
motor,” IEEE Synposium on Computer Applications and Industrial Electronics (ISCAIE), pp. 81-86, 2017.
[13] H. Senberber and A. Bagis, “Fractional PID controller design for fractional order systems using ABC algorithm,”
IEEE Electronics, pp. 1-7, 2017.
[14] M. R. B. Ghazali, et al., “Adaptive safe experimentation dynamics for data-driven neuroendocrine-PID control of
MIMO systems,” IETE Journal of Research, pp. 1-14, 2019.
[15] Y. D. Mfoumboulou and R. Tzoneva, “Development of a Model Reference Digital Adaptive Control Algorithm for
a Linearized Model of a Nonlinear Process,” International Journal of Applied Engineering Research, vol. 13,
no. 23, pp. 16662-16675, 2018.
[16] N. Winston, et al., “Design and performance comparison of different adaptive control schemes for pitch angle
control in a twin–rotor MIMO system,” International Journal of Electrical and Computer Engineering (IJECE),
vol. 9, no. 5, pp. 4114-4129, 2019.
[17] K. J. Astrom and B. Wittenmark, “Adaptive Control,” Second Edition, Dover Publications, 2008.
[18] N. Nise, “Control Systems Engineering Eighth Edition,” John Wiley & Sons, Limited, 2019.
[19] K. Ogata, “Modern Control Engineering Fourth Edition,” Upper Saddle River, New Jersey, Prentice Hall, 2002.
[20] Y. D Mfoumboulou, “Development of nonlinear control algorithms for implementation in distributed system,”
Master Thesis, Cape Peninsula University of Technology, 2014.
[21] MathWorks, “Control System toolbox user’s guide 2016a,” The MathWorks, Inc., 2016.
[22] A.B. Campo, “PID Control Design,” MATLAB - A Fundamental Tool for Scientific Computing and Engineering
Applications, vol. 1, pp. 3-18, 2012.
[23] S. Coman and C. Boldisor, “Adaptive Pi Controller Design to Control a Mass - Damper - Spring Process,” Bulletin
of the Transilvania University of Brasov, vol. 7, no. 2, 2014.
[24] T. Basten, et al., “Model-Based Design of Adaptive Embedded Systems,” Model-based design of adaptive
embedded systems. Verlag London: Springer, vol. 22, 2013.
[25] E. Kurniawan, et al., “Model-Based Control for Tracking and Rejection of Periodic Signals,” 7th International
Conference on Information Technology and Electrical Engineering (ICITEE), pp. 548-552, 2015.
BIOGRAPHY OF AUTHOR
Dr. Yohan Darcy Mfoumboulou is a post doctorate fellow at Cape Peninsula University of
Technology (CPUT). His research interests are in the fields of Classical and Modern Control,
Advanced Nonlinear Control, Real-Time Distributed Control Systems, Linear and Nonlinear
Adaptive Networked Control, Digital Adaptive Control and Process Control and
Instrumentation.](https://crownmelresort.com/image.slidesharecdn.com/3122700ce6jul20jun31mary-210319084947/75/Design-of-a-model-reference-adaptive-PID-control-algorithm-for-a-tank-system-19-2048.jpg)