This document discusses optimization techniques for programming microcontrollers, emphasizing the importance of understanding hardware and compiler options. It highlights strategies for memory usage, code structure, and power management in resource-constrained environments. The presentation aims to guide developers in making informed decisions to improve efficiency while potentially sacrificing maintainability.
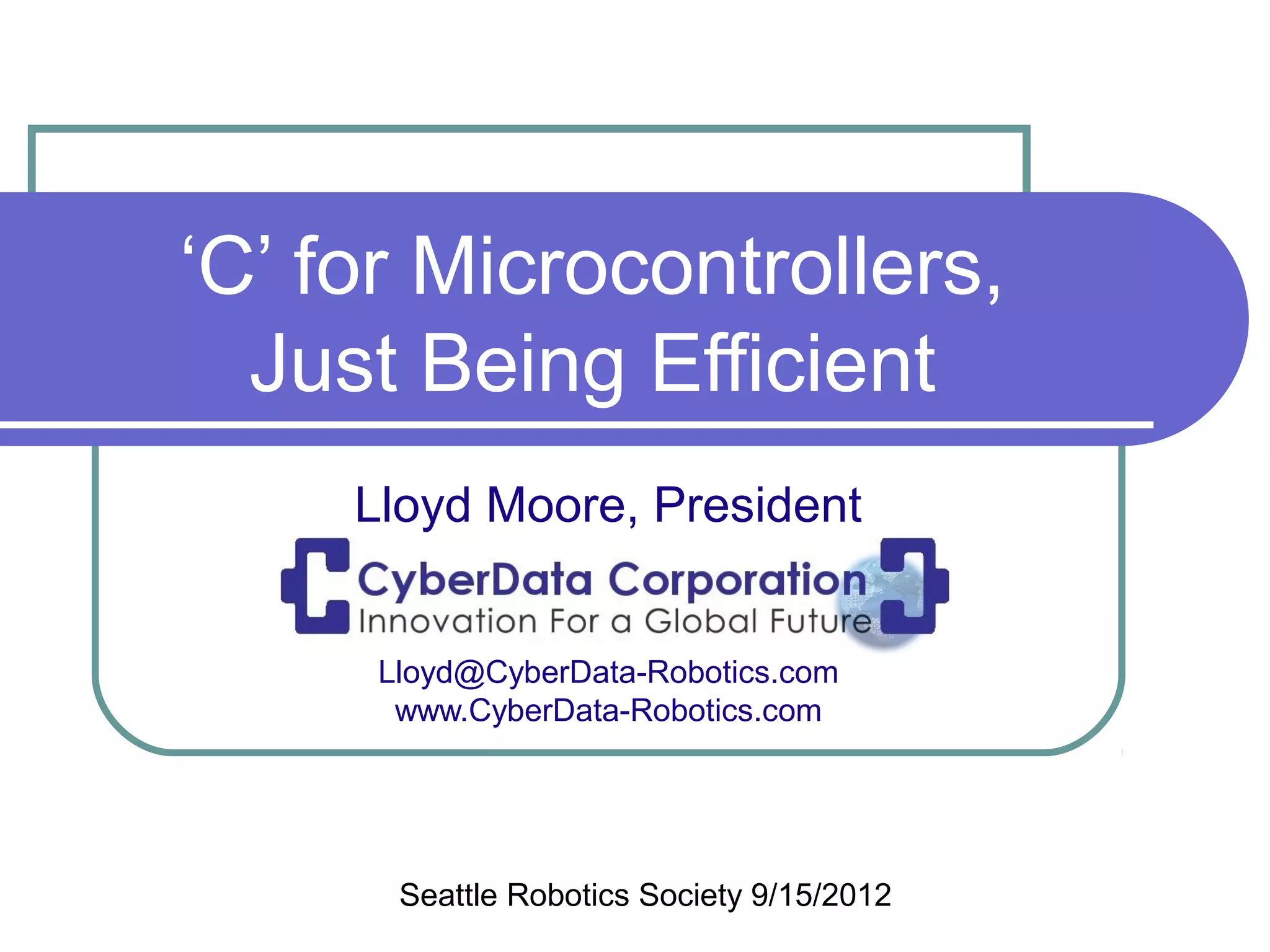
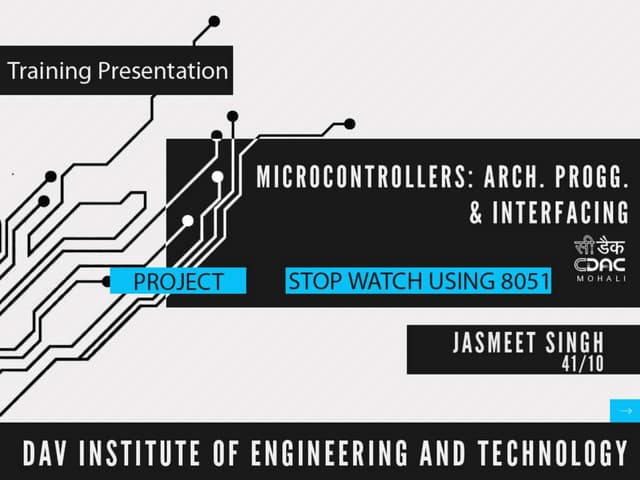
![Indexed Array vs Pointer on M8C
ucMode = g_Channels[uc_Channel].ucMode; ucMode = pChannel->ucMode;
01DC 52FC mov A,[X-4] 01ED 5201 mov A,[X+1]
01DE 5300 mov [__r1],A 01EF 5300 mov [__r1],A
01E0 5000 mov A,0
01F1 3E00 mvi A,[__r1]
01E2 08 push A
01E3 5100 mov A,[__r1] 01F3 5405 mov [X+5],A
01E5 08 push A
01E6 5000 mov A,0 Does the same thing
01E8 08 push A Saves 29 bytes of memory AND a
01E9 5007 mov A,7
01EB 08 push A
call to a 16 bit multiplication routine!
01EC 7C0000 xcall __mul16 Pointer version will be at least 4x
01EF 38FC add SP,-4 faster to execute as well, maybe 10x
01F1 5F0000 mov [__r1],[__rX] Most compilers not this bad – but you
01F4 5F0000 mov [__r0],[__rY] do find some!
01F7 060000 add[__r1],<_g_Channels
01FA 0E0000 adc[__r0],>_g_Channels
01FD 3E00 mvi A,[__r1]
01FF 5403 mov [X+3],A](https://image.slidesharecdn.com/cformicrocontrollers-130401144933-phpapp02/75/C-for-Microcontrollers-12-2048.jpg)











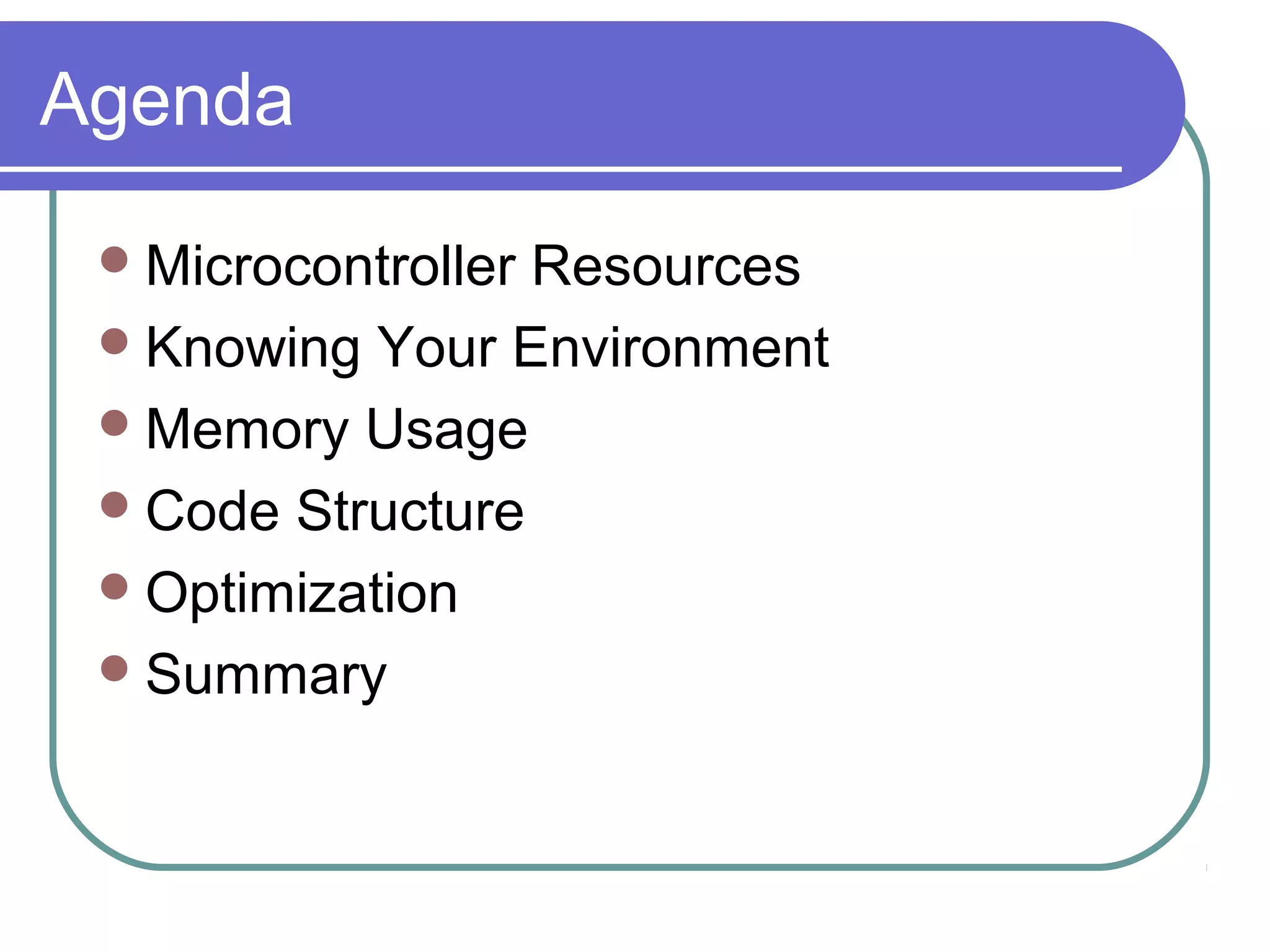
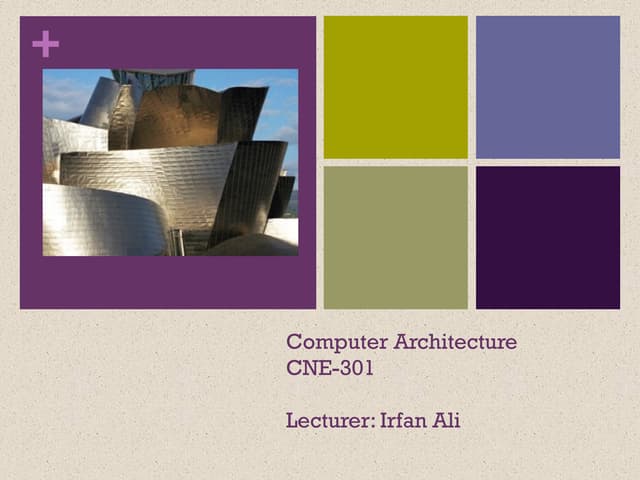
![Indexed Array vs Pointer on M8C
ucMode = g_Channels[uc_Channel].ucMode; ucMode = pChannel->ucMode;
01DC 52FC mov A,[X-4] 01ED 5201 mov A,[X+1]
01DE 5300 mov [__r1],A 01EF 5300 mov [__r1],A
01E0 5000 mov A,0
01F1 3E00 mvi A,[__r1]
01E2 08 push A
01E3 5100 mov A,[__r1] 01F3 5405 mov [X+5],A
01E5 08 push A
01E6 5000 mov A,0 Does the same thing
01E8 08 push A Saves 29 bytes of memory AND a
01E9 5007 mov A,7
01EB 08 push A
call to a 16 bit multiplication routine!
01EC 7C0000 xcall __mul16 Pointer version will be at least 4x
01EF 38FC add SP,-4 faster to execute as well, maybe 10x
01F1 5F0000 mov [__r1],[__rX] Most compilers not this bad – but you
01F4 5F0000 mov [__r0],[__rY] do find some!
01F7 060000 add[__r1],<_g_Channels
01FA 0E0000 adc[__r0],>_g_Channels
01FD 3E00 mvi A,[__r1]
01FF 5403 mov [X+3],A](https://crownmelresort.com/image.slidesharecdn.com/cformicrocontrollers-130401144933-phpapp02/75/C-for-Microcontrollers-12-2048.jpg)




























![[mobiconf 2014] Shazam mobile apps - Data Driven Project Management](https://cdn.slidesharecdn.com/ss_thumbnails/09-141003070755-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)








![[appclub] Shazam mobile apps - Data Driven Project Management](https://cdn.slidesharecdn.com/ss_thumbnails/10-141031065041-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)












![reductio [ad absurdum]](https://cdn.slidesharecdn.com/ss_thumbnails/taualywhssudecboubib-signature-40f4714a7511dbefb3f8b81978ee26a52b8bc17a56b46da771a1d673a5b4d7df-poli-170804175449-thumbnail.jpg?width=640&height=640&fit=bounds)


































![Support, Monitoring, Continuous Improvement & Scaling Agentic Automation [3/3]](https://cdn.slidesharecdn.com/ss_thumbnails/agenticcommunityseries-day3-cfd-251120170304-ddef8112-thumbnail.jpg?width=640&height=640&fit=bounds)