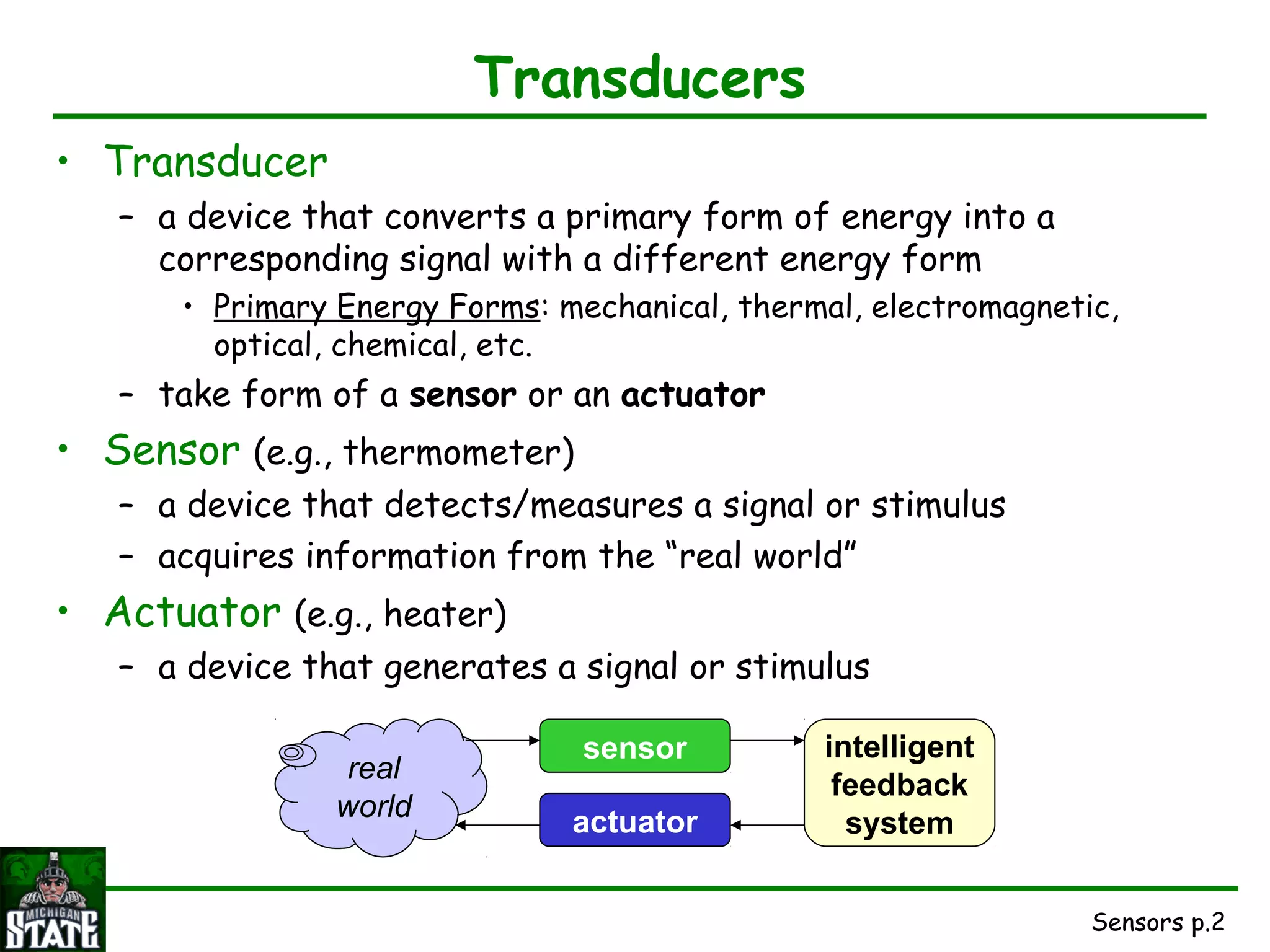
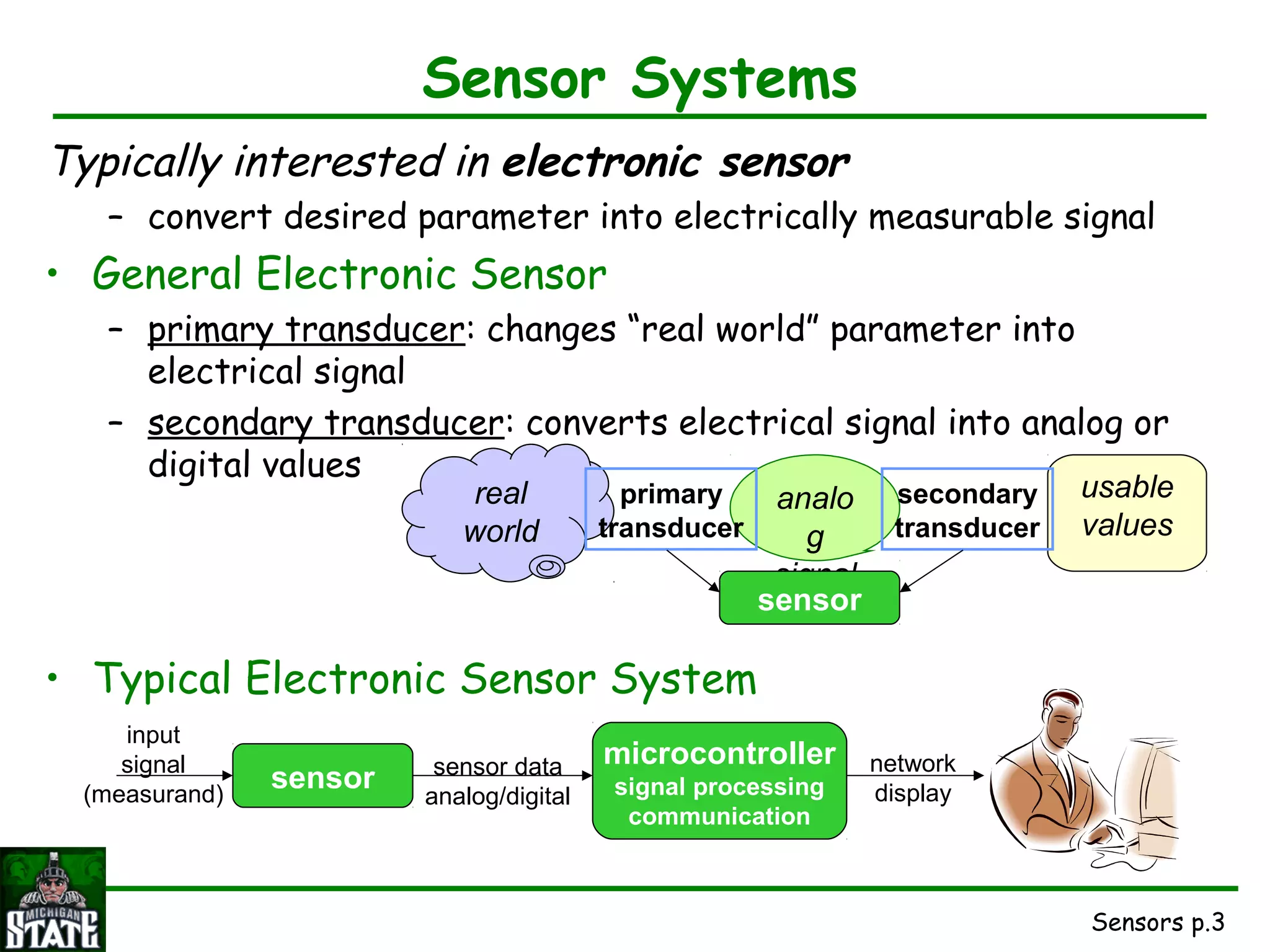
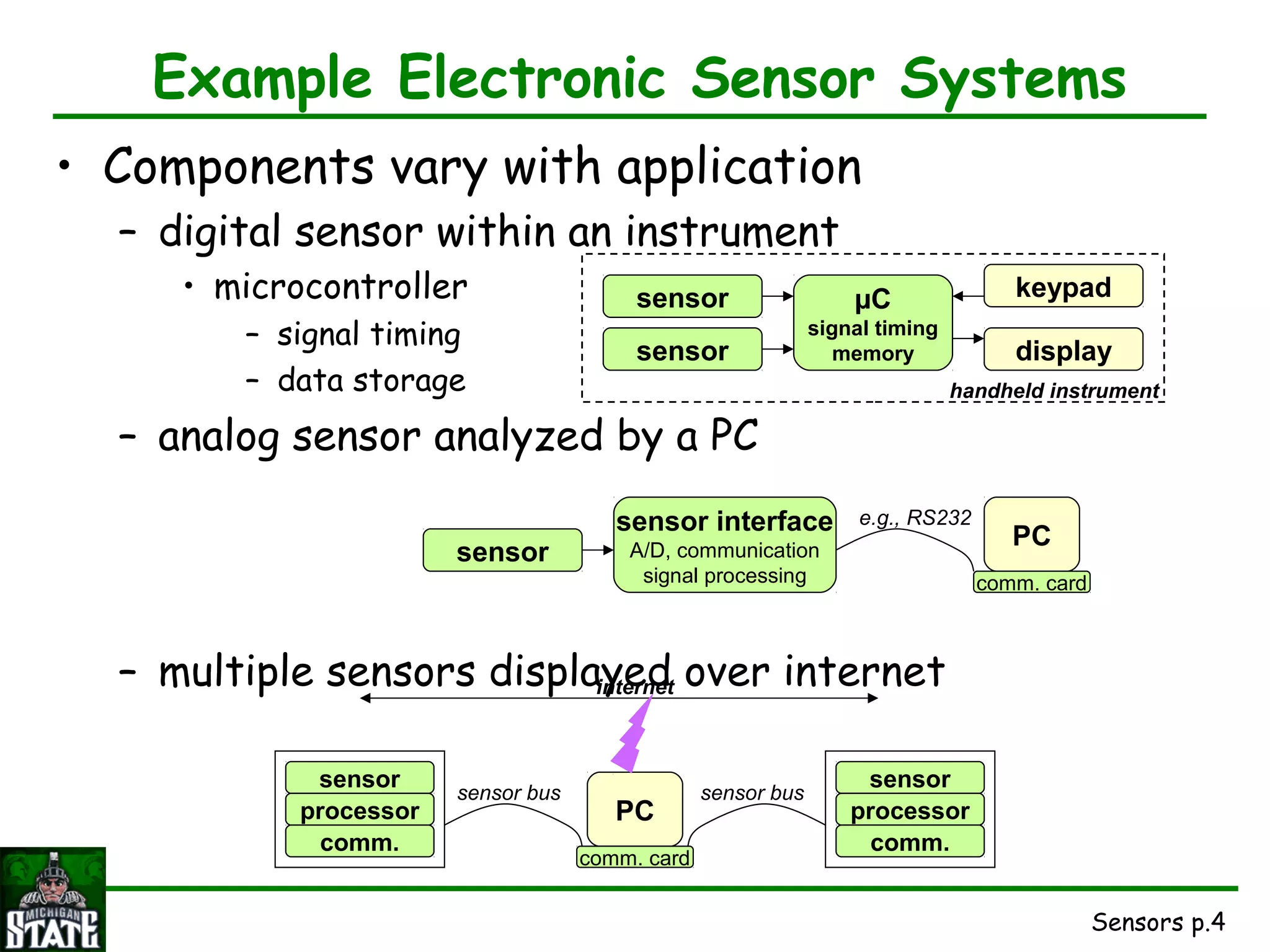
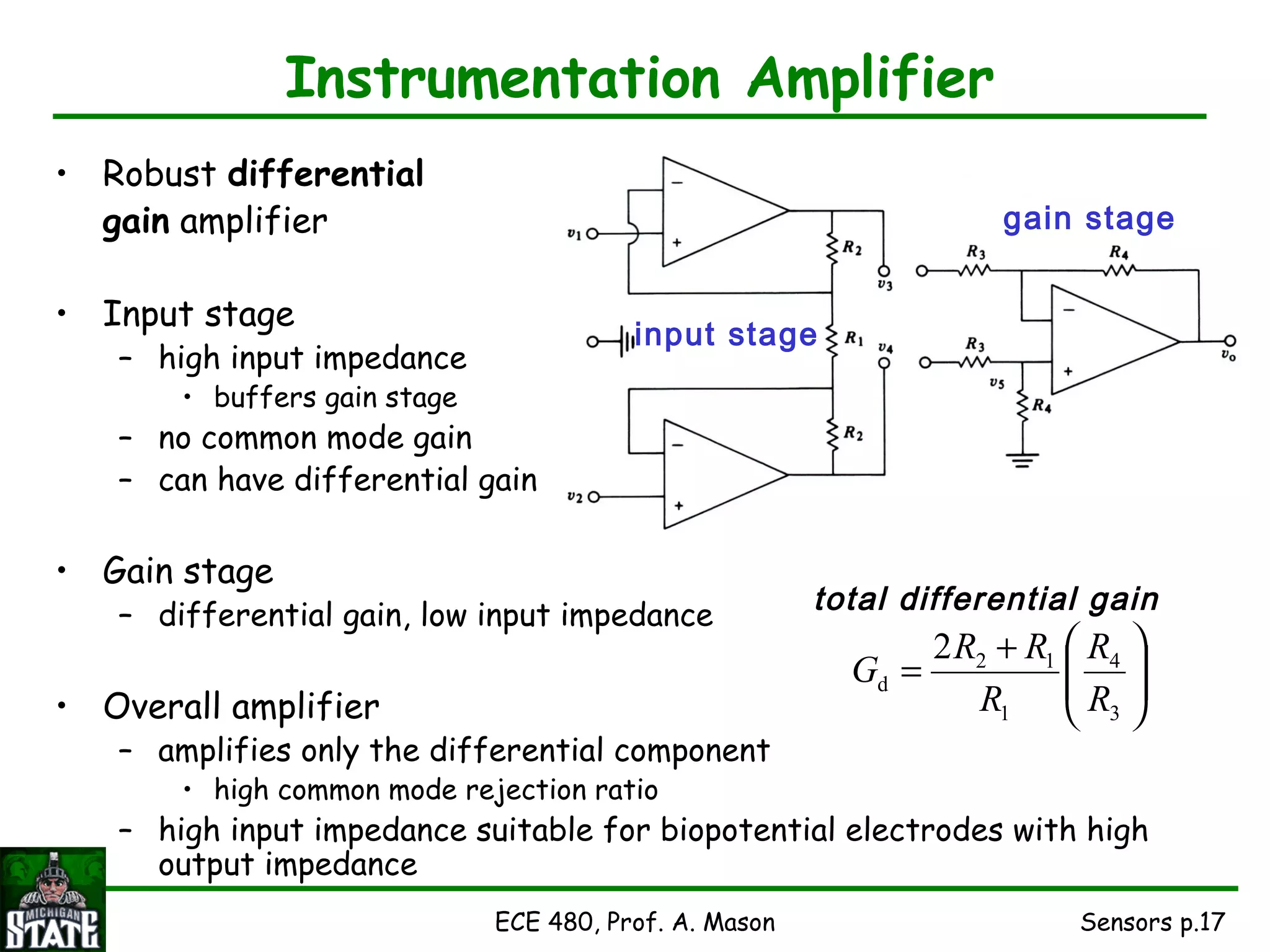
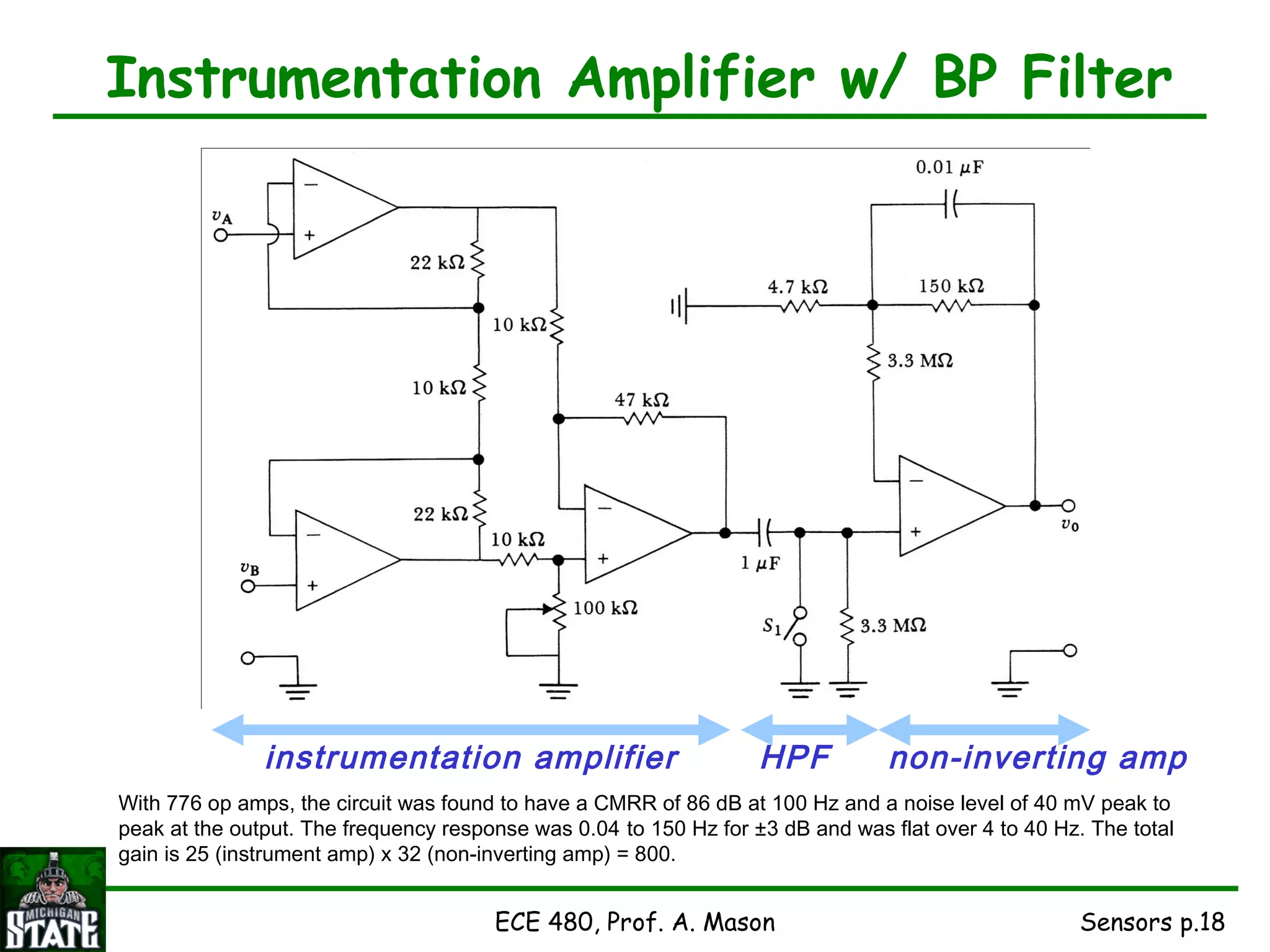
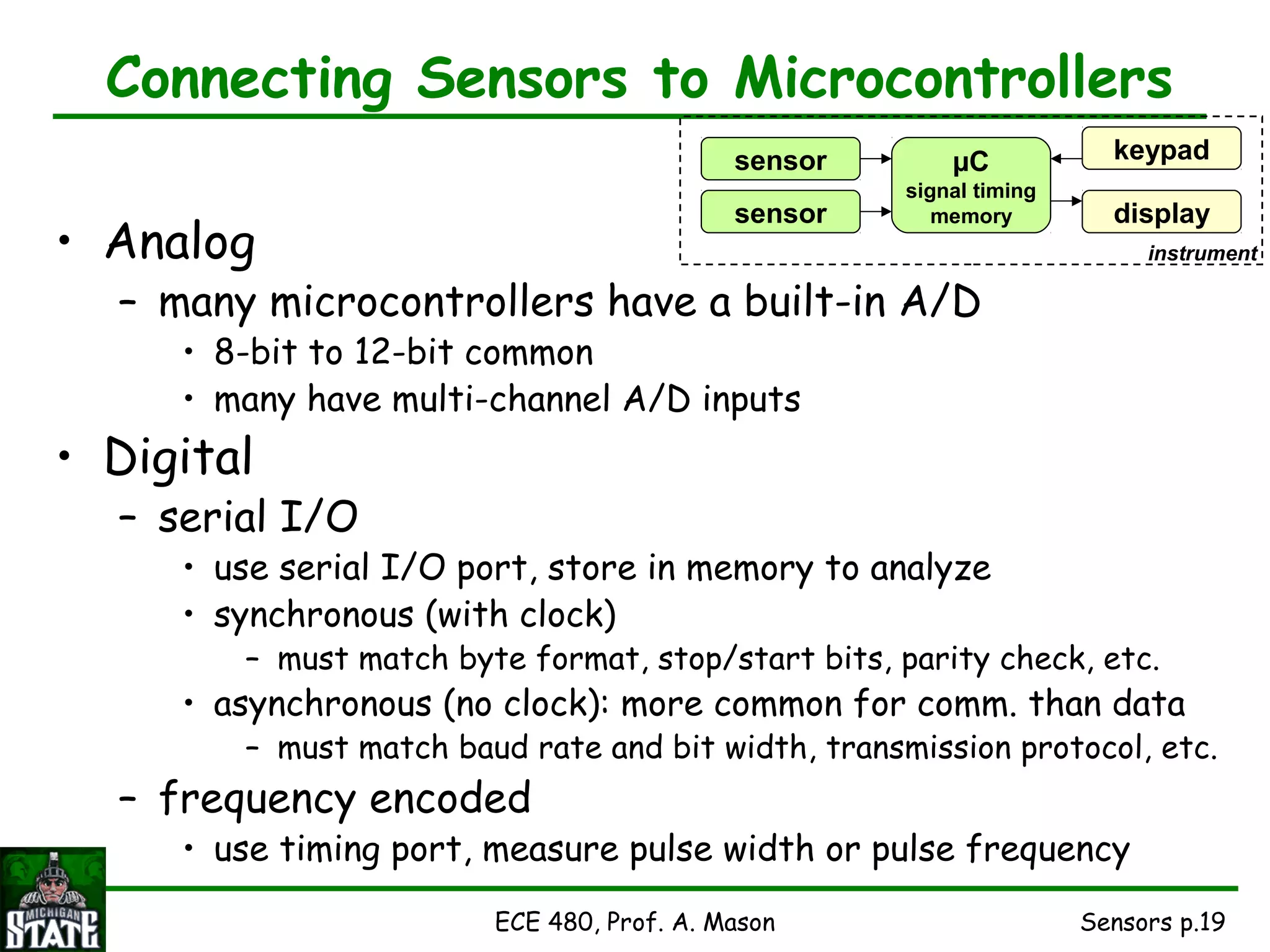
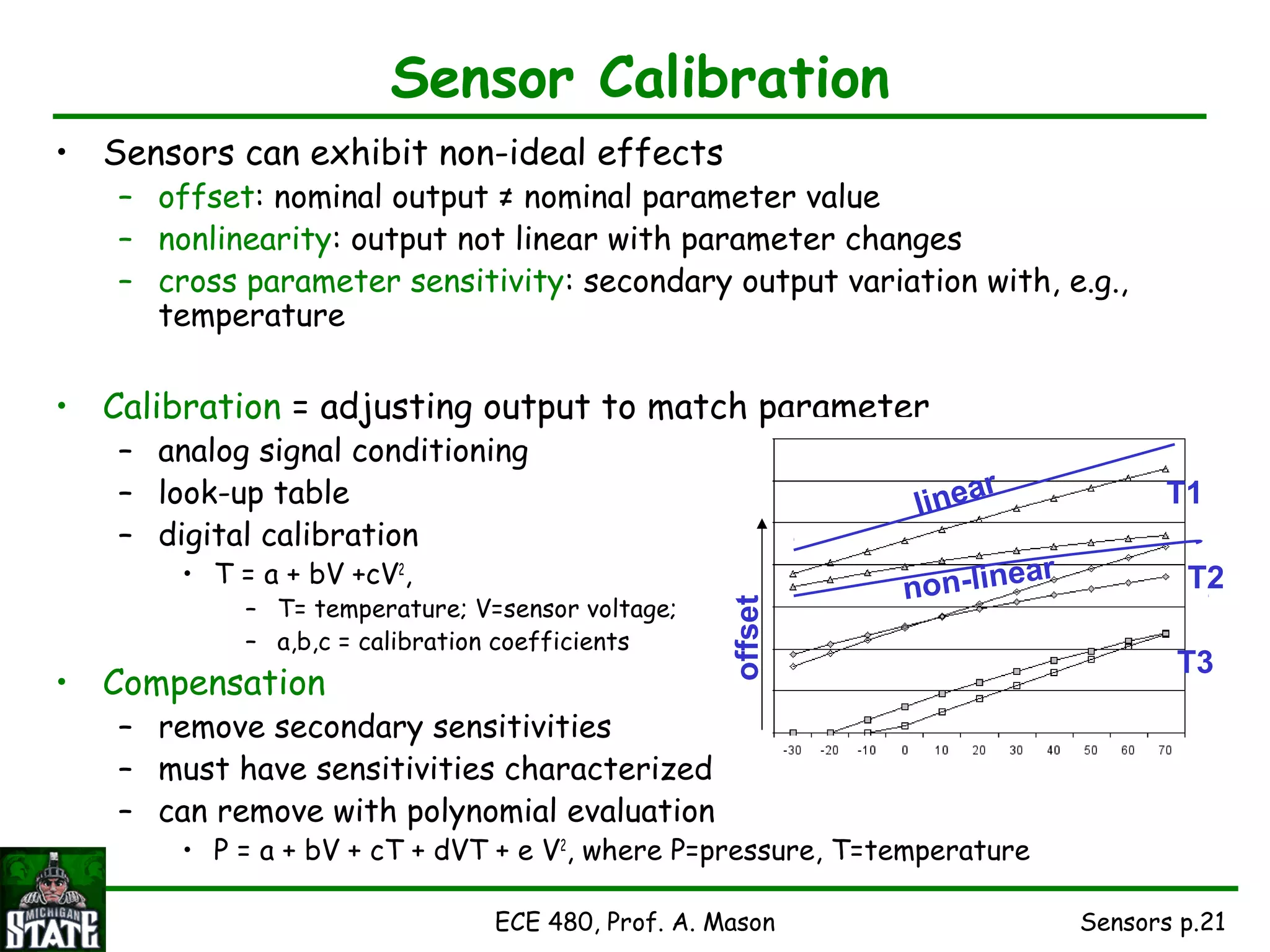
The document discusses sensors and transducers. It defines a transducer as a device that converts one form of energy to another, with sensors detecting signals from the real world and actuators generating signals. Electronic sensors typically use primary transducers to convert a parameter into an electrical signal, and secondary transducers to further process the signal. Common sensor components and configurations are described such as op-amps, instrumentation amplifiers, and connecting sensors to microcontrollers and networks. The document also covers transducer types including mechanical, thermal, optical, and chemical. Sensor calibration techniques are discussed to address non-ideal sensor effects.