Downloaded 66 times
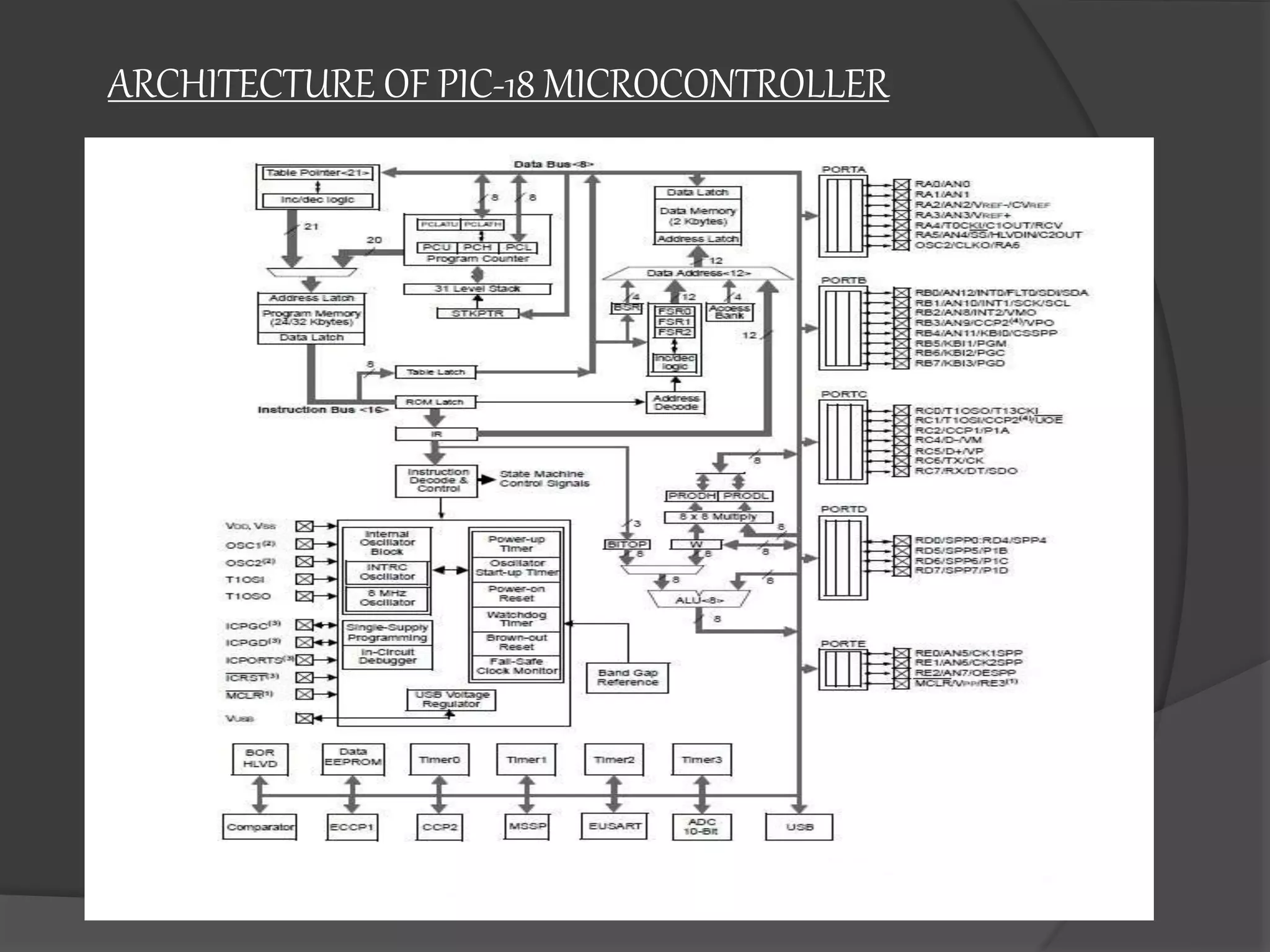
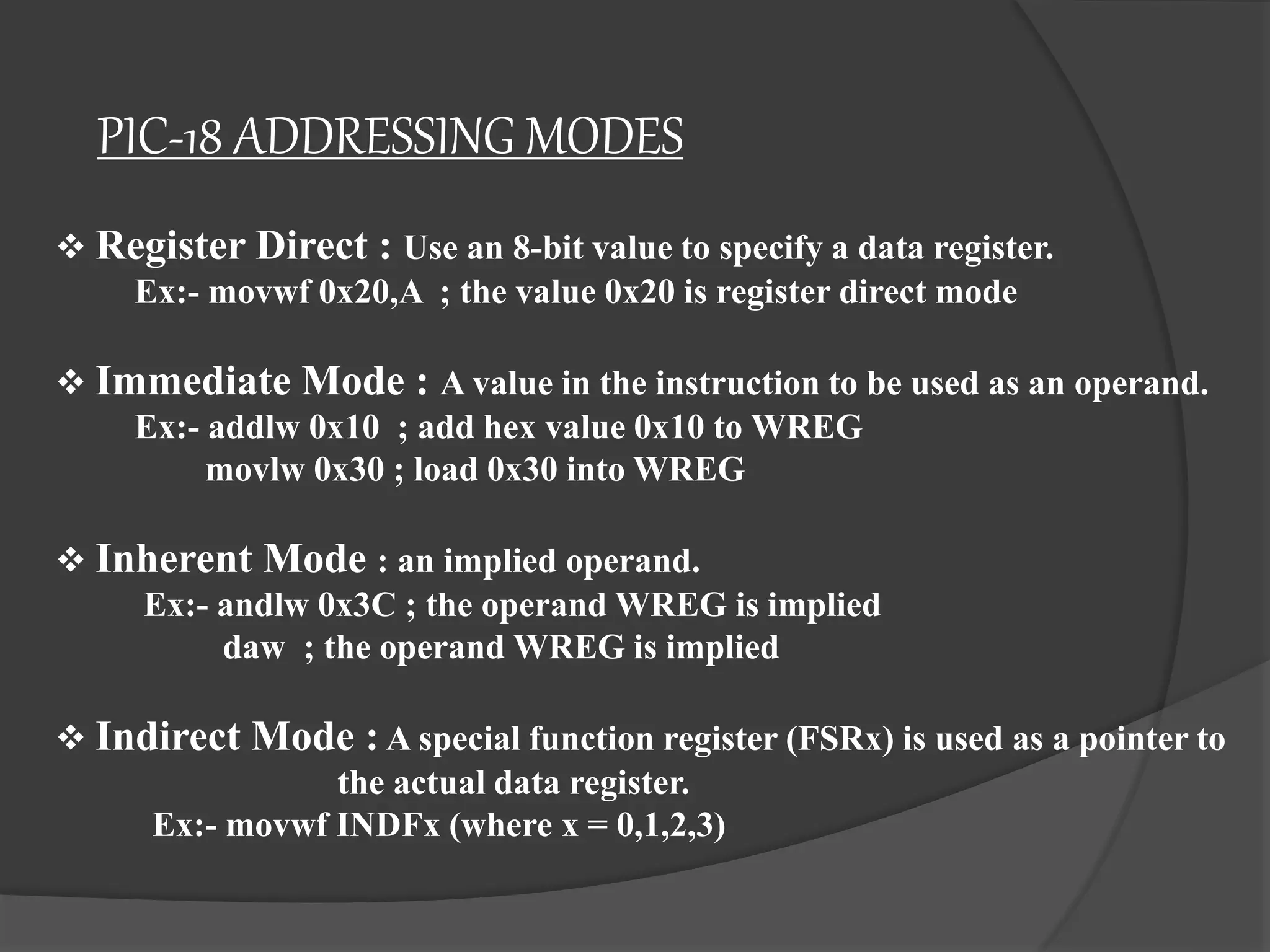
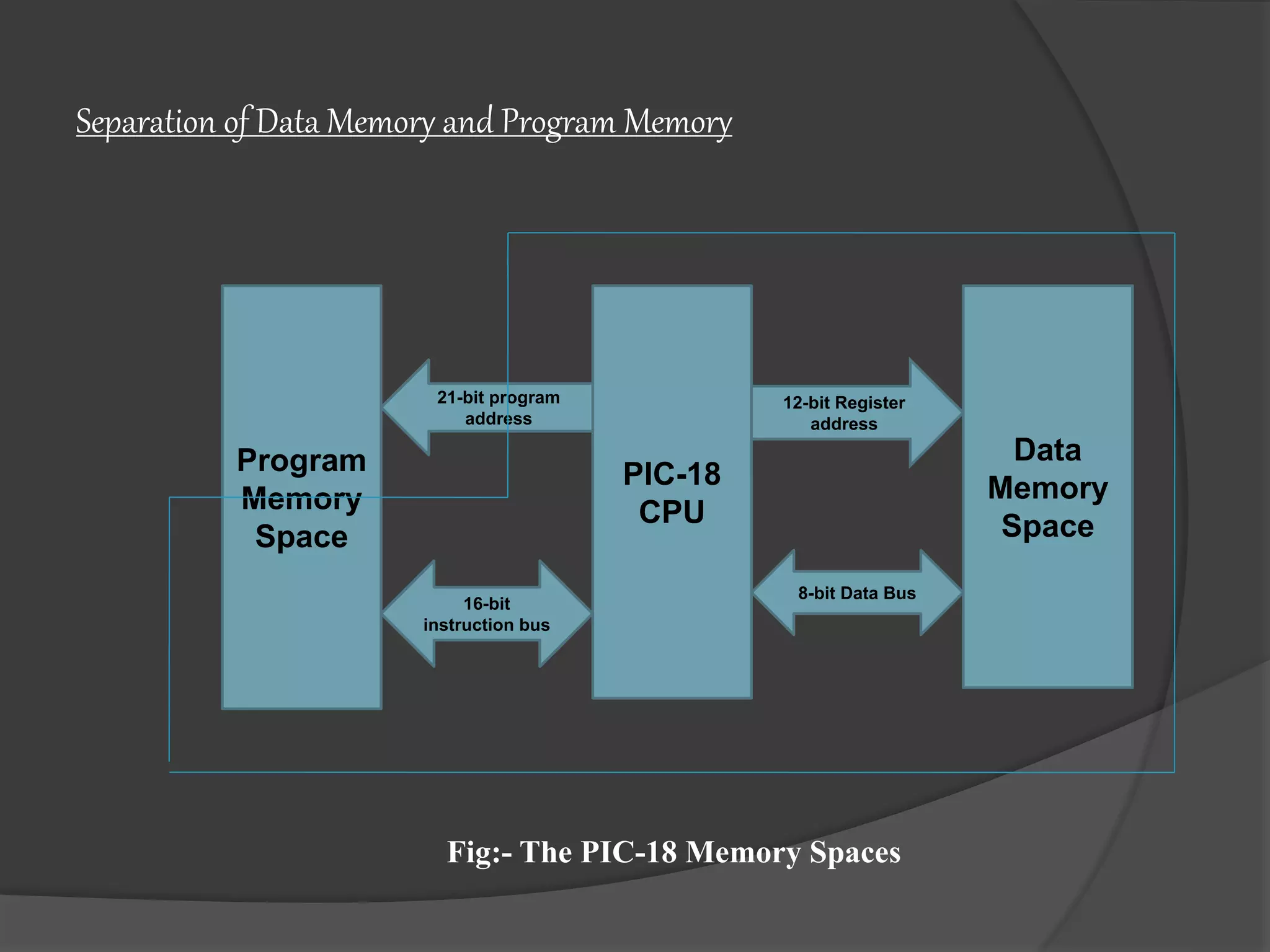
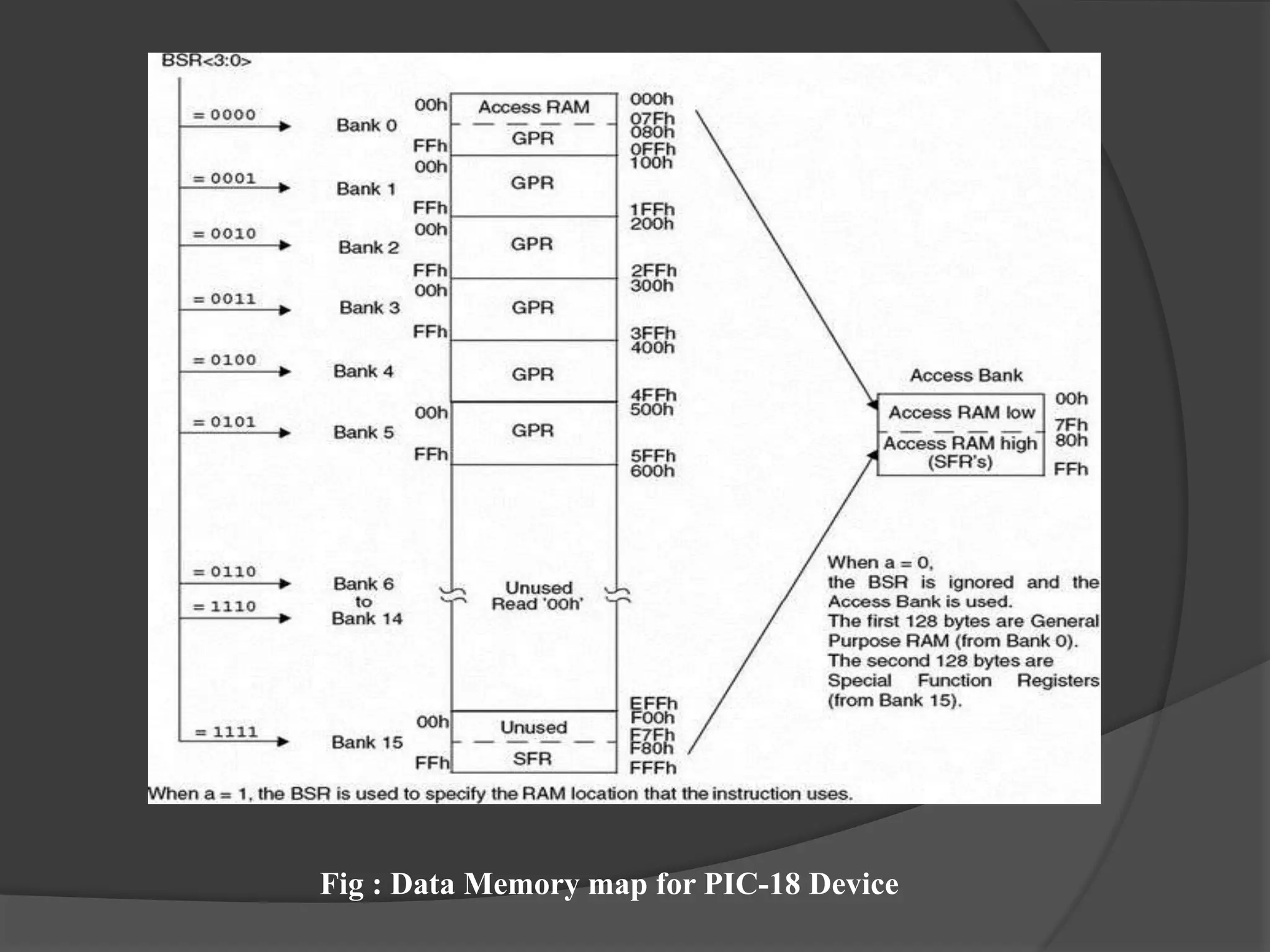
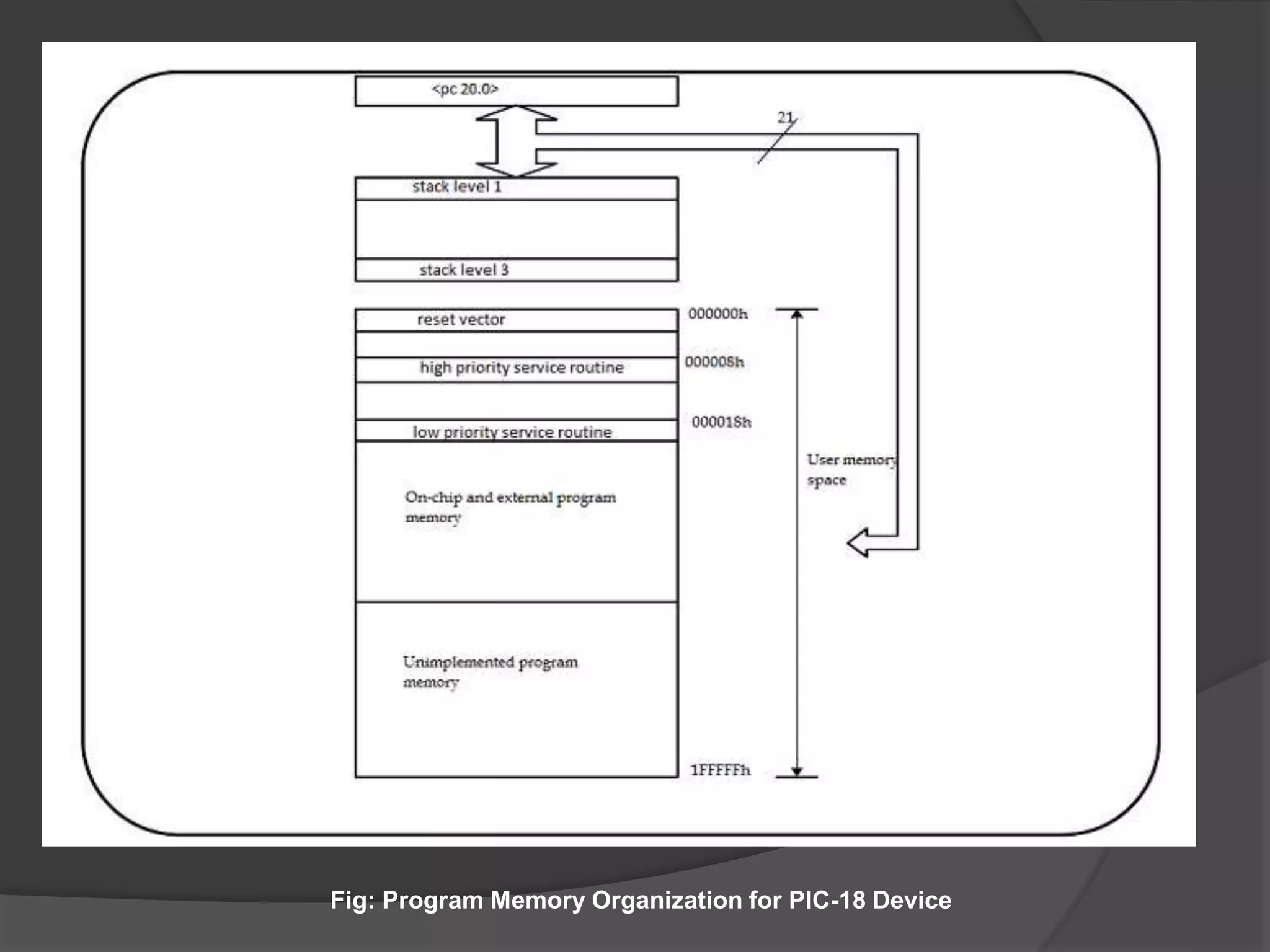
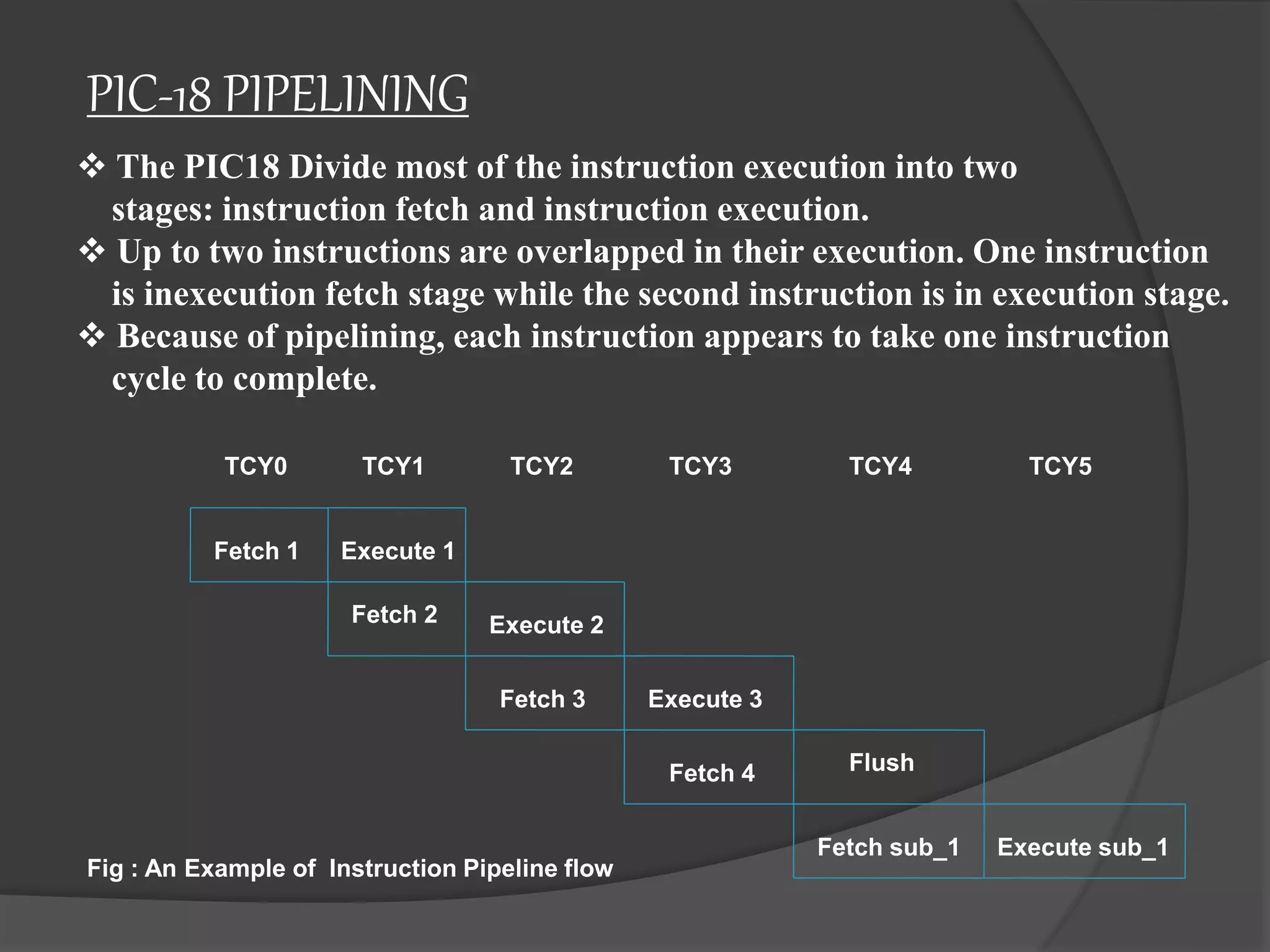

















This document provides an overview of the PIC-18 microcontroller. It describes the PIC-18's features such as its 8-bit architecture with 16-bit instruction sets, memory sizes including 256 bytes of EPROM and 2KB of SRAM. The document also discusses the PIC-18's addressing modes, memory organization with separate program and data memory spaces, and instruction pipelining capability.