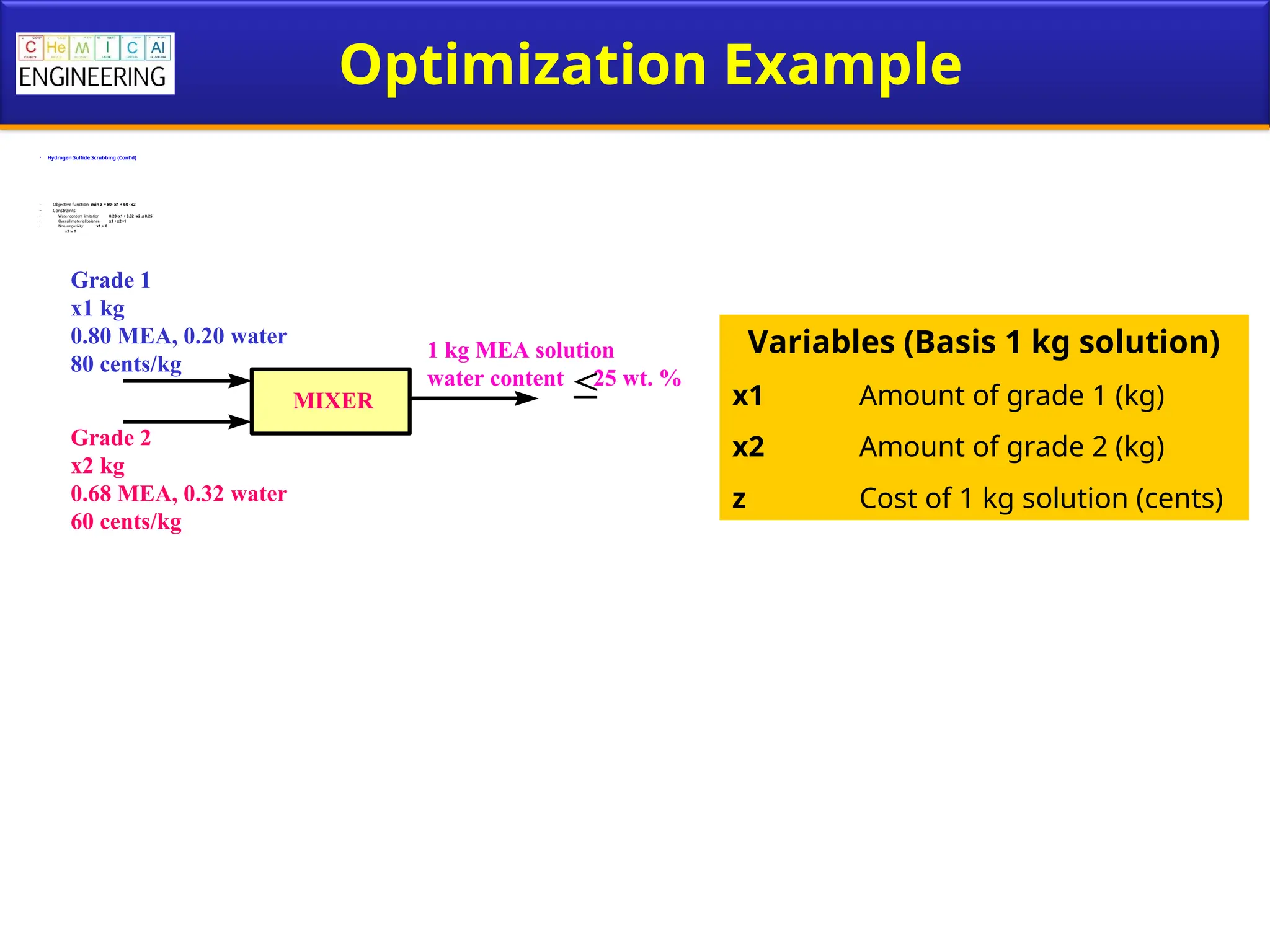
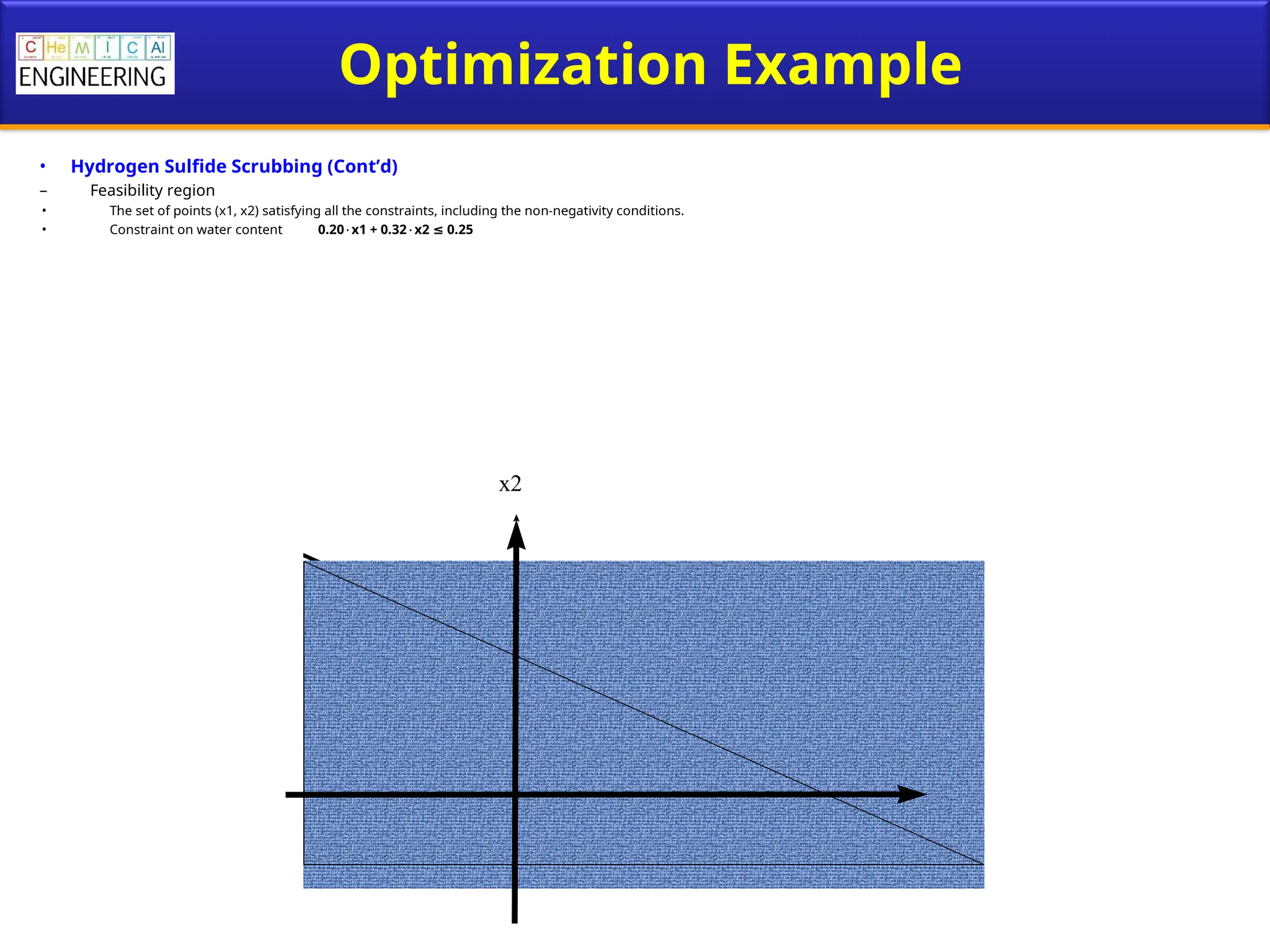
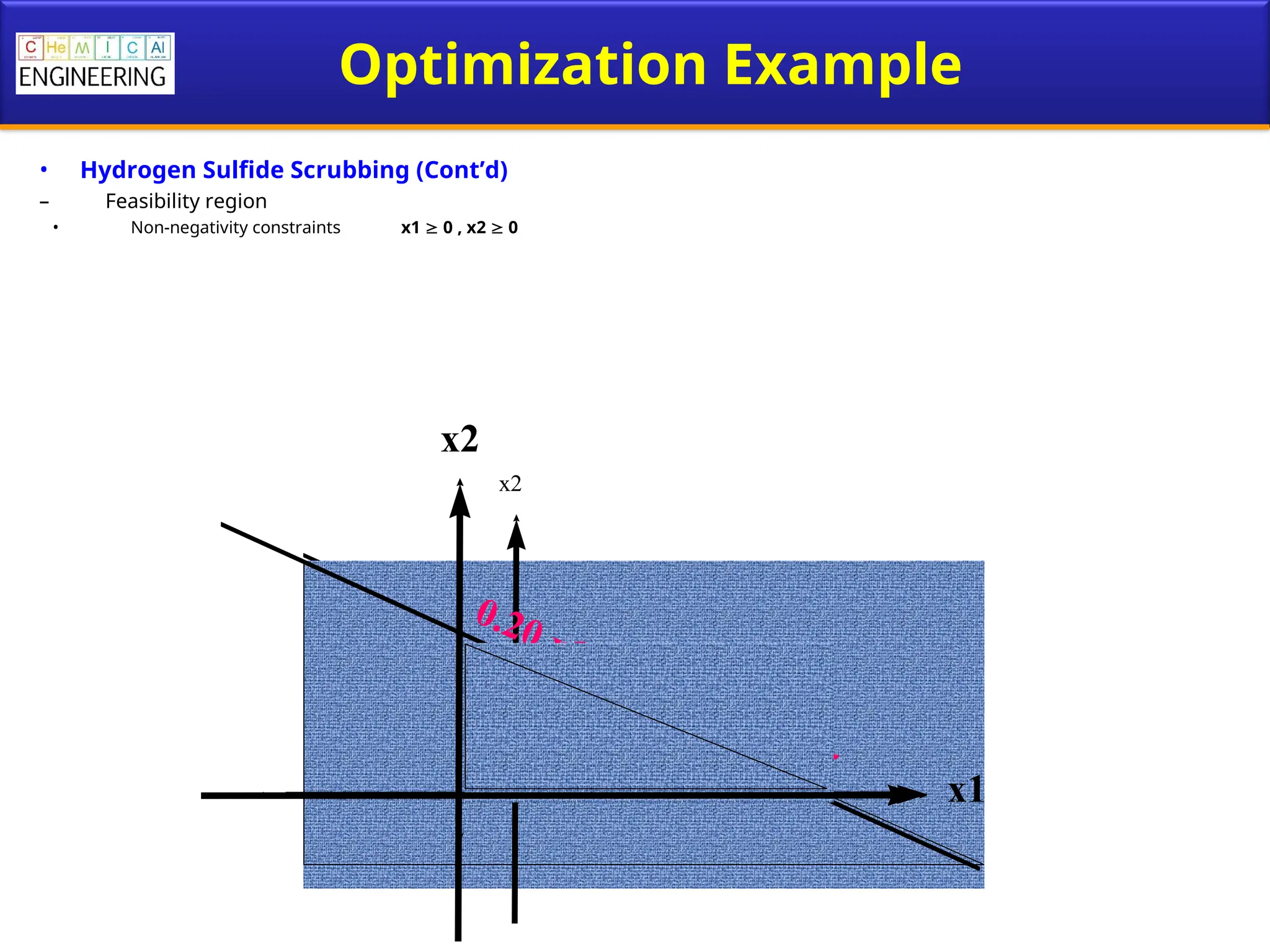
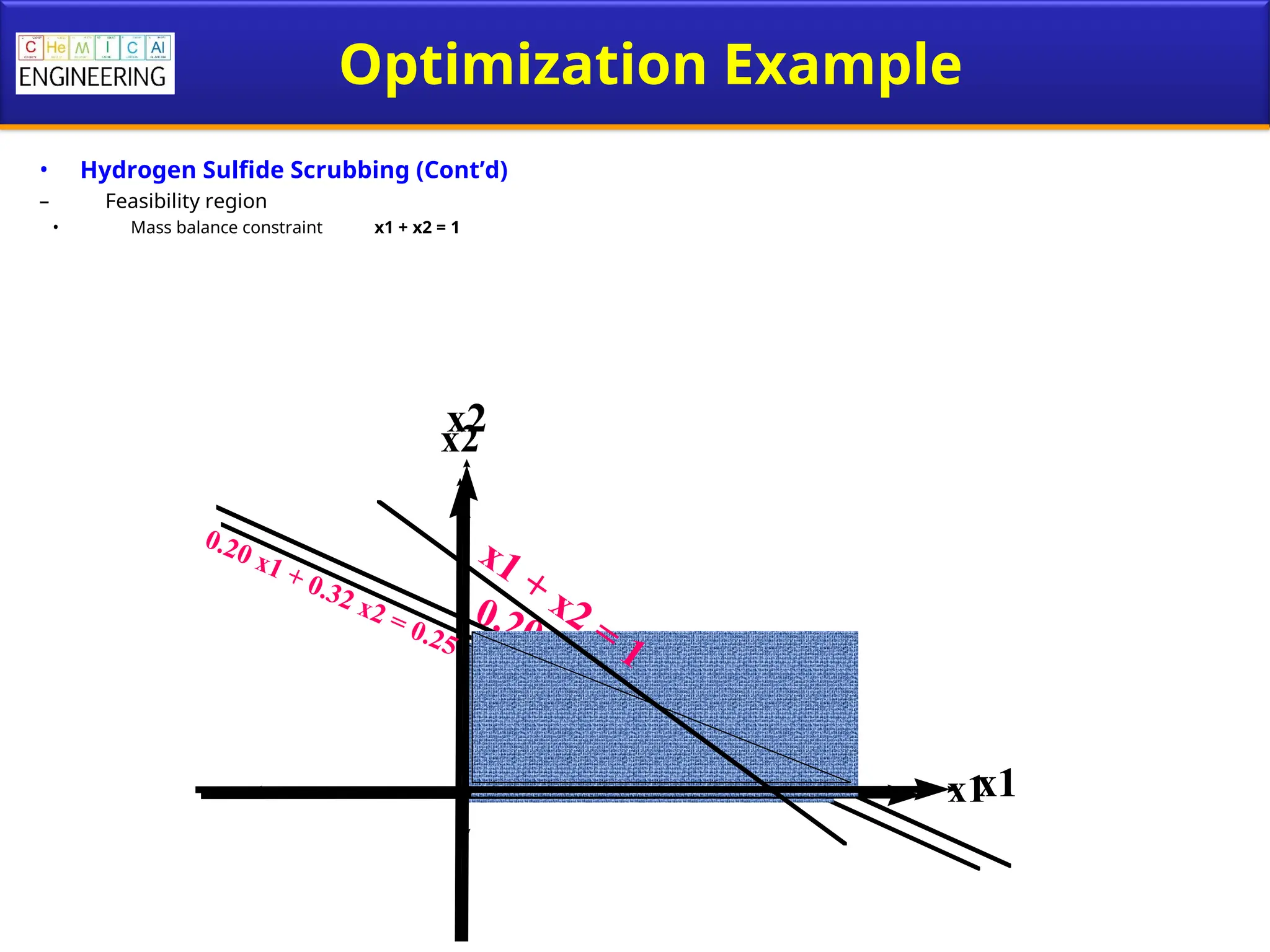
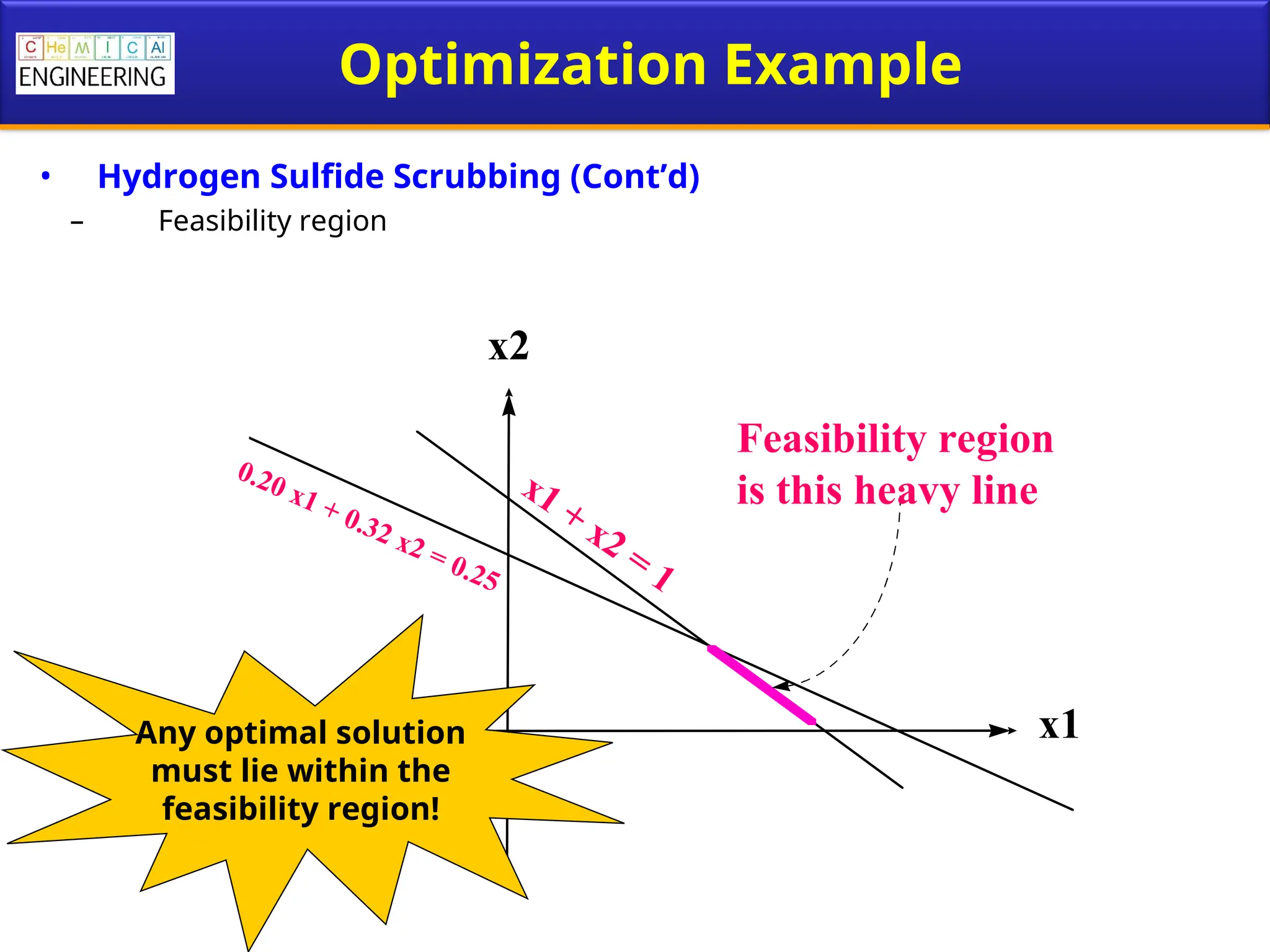
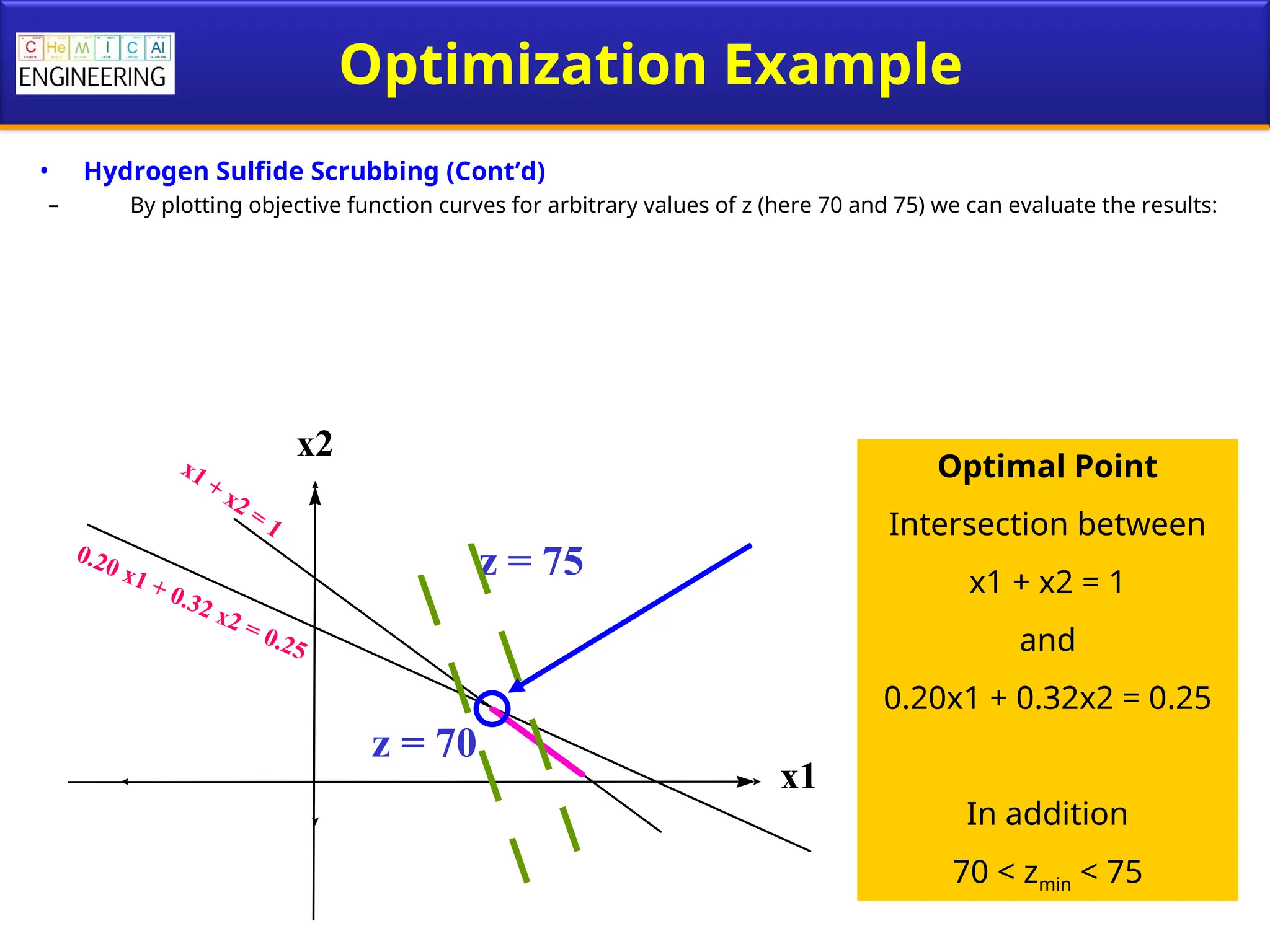
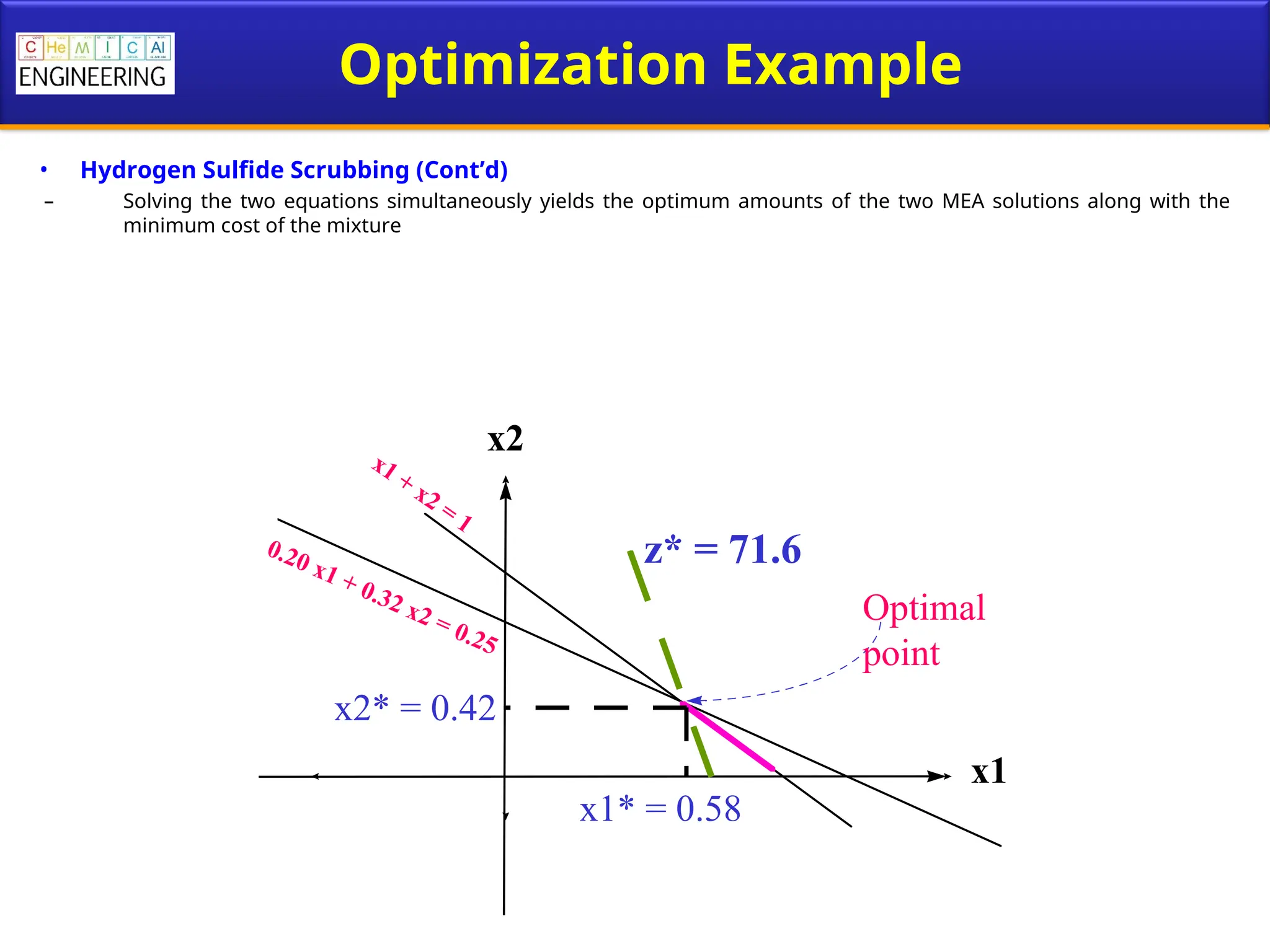
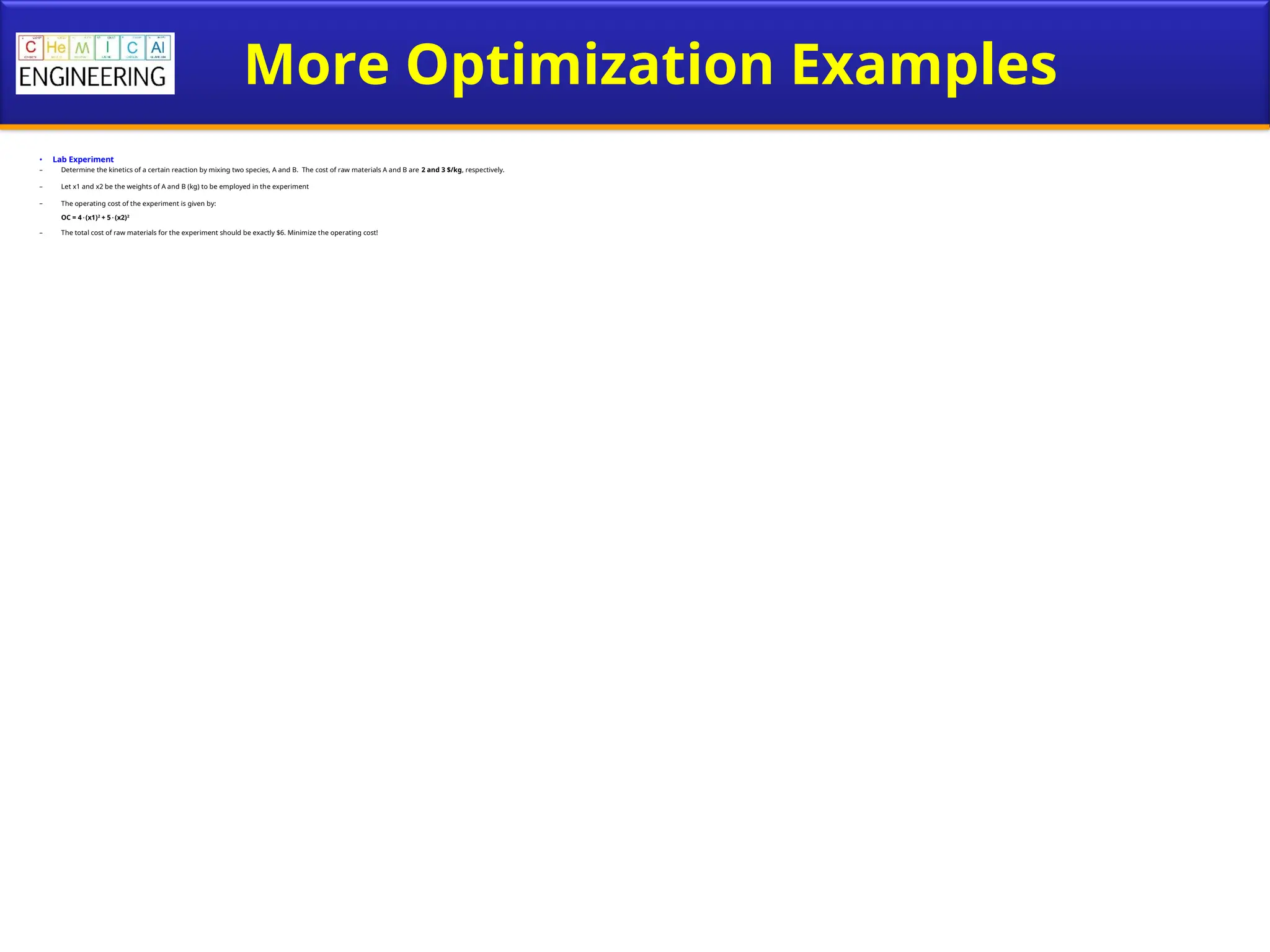
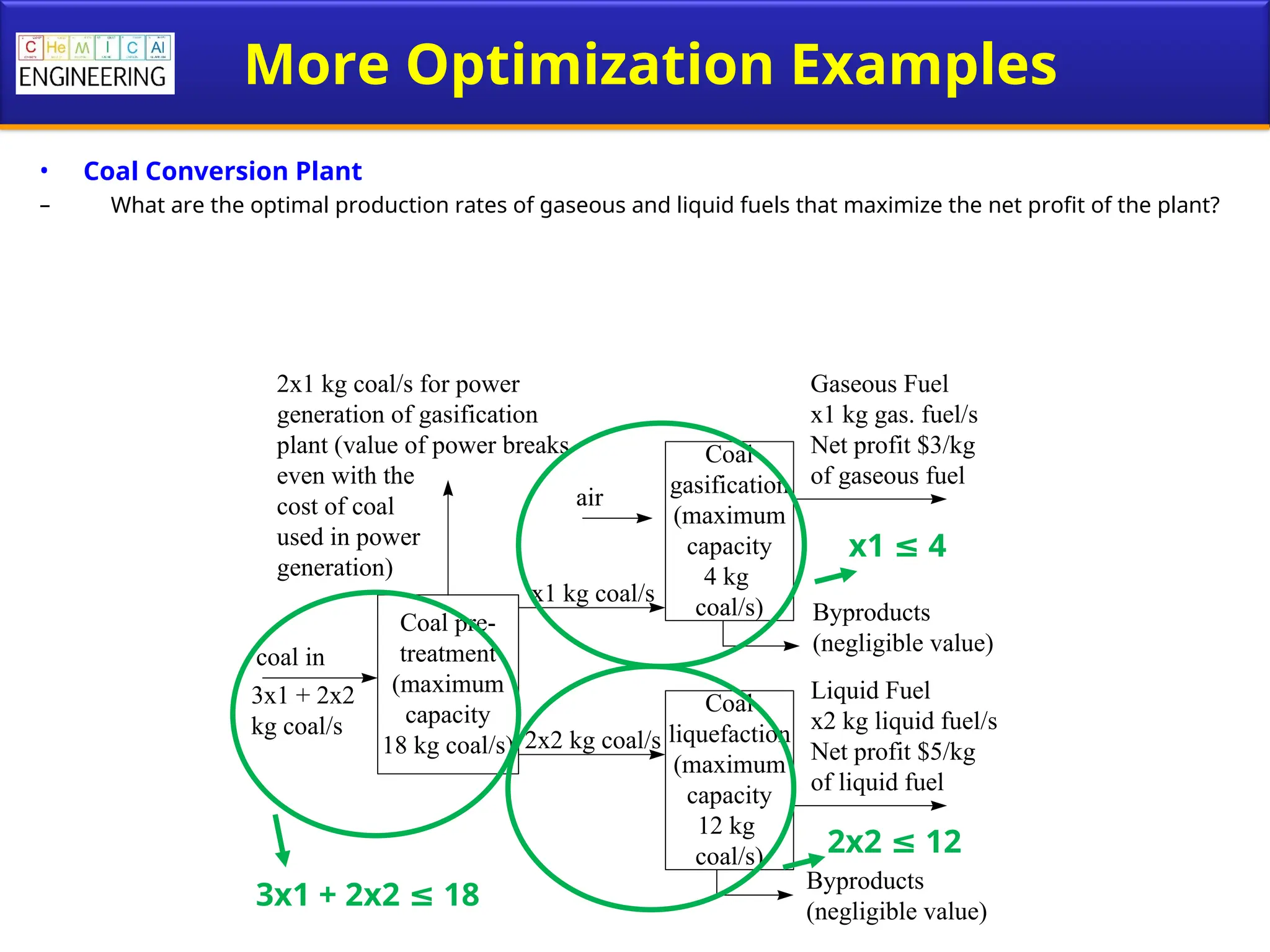
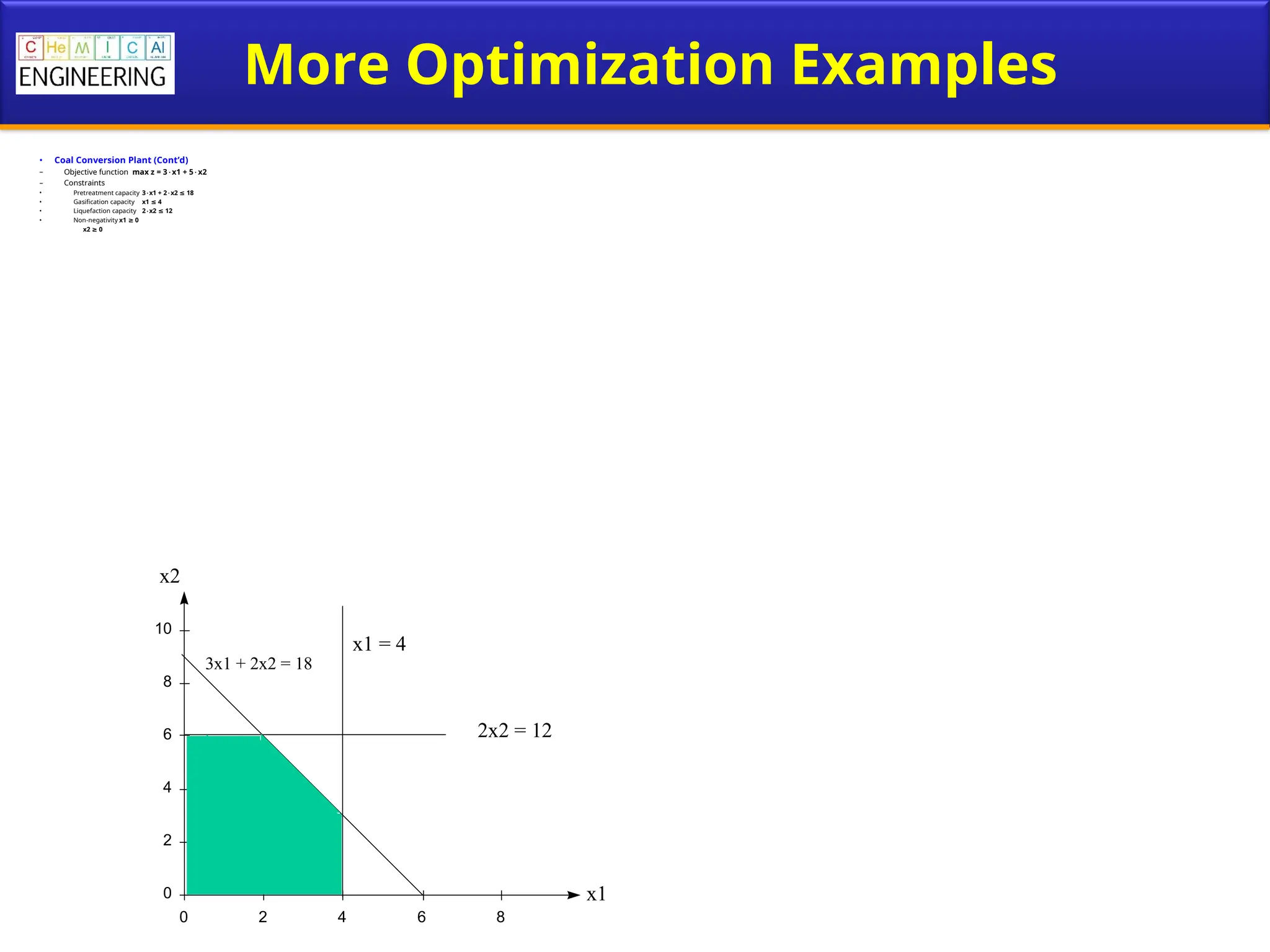
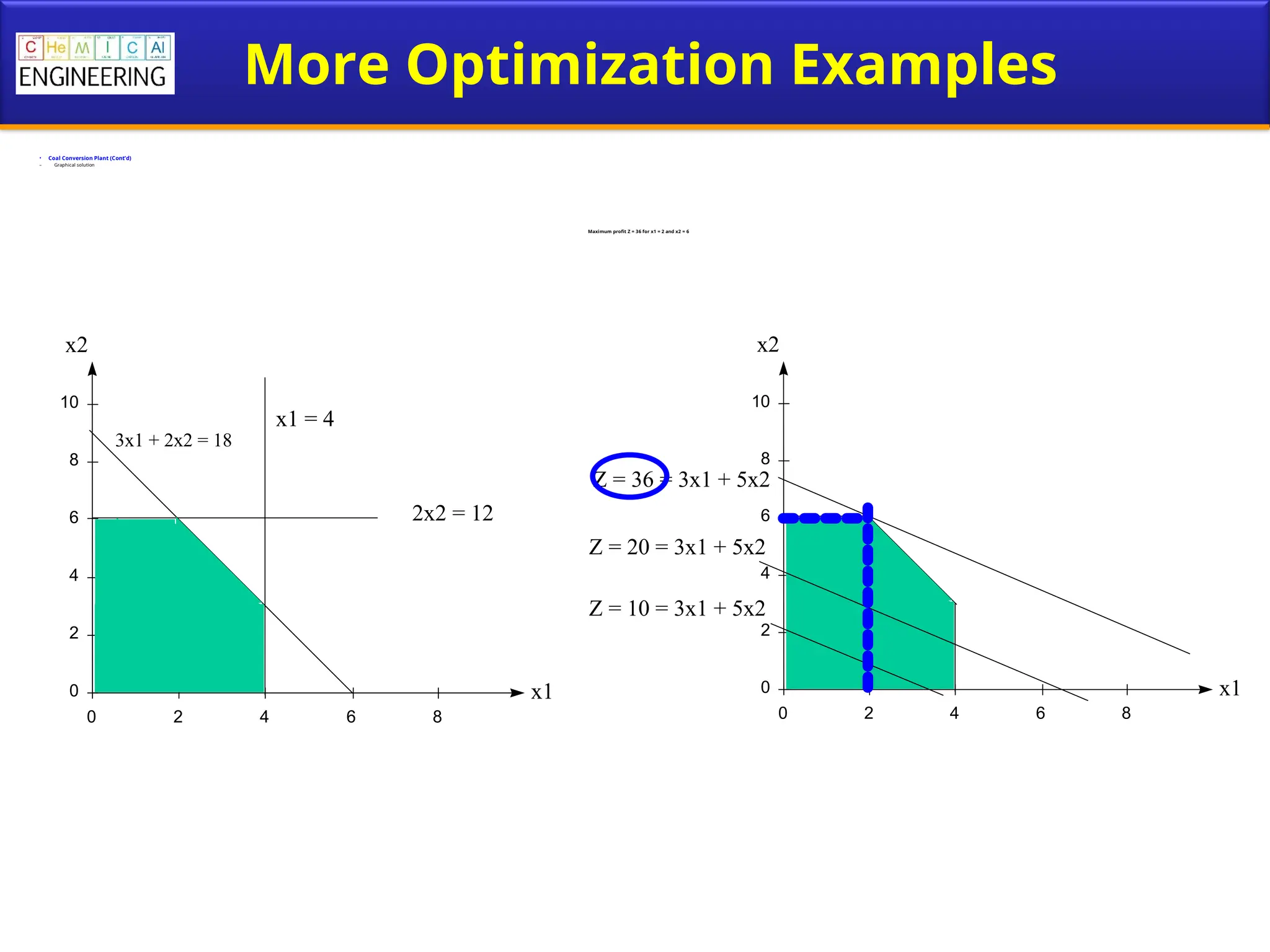
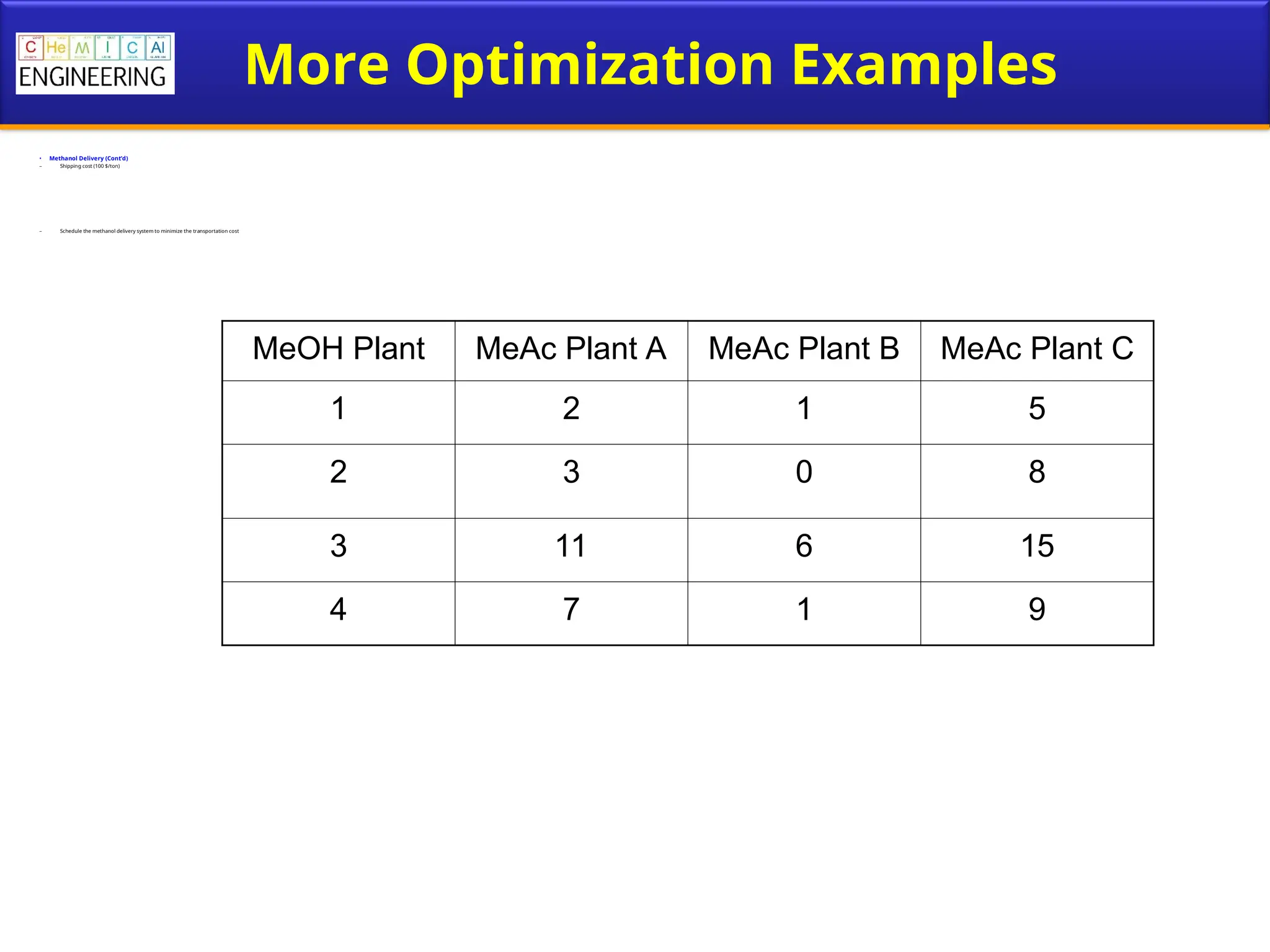
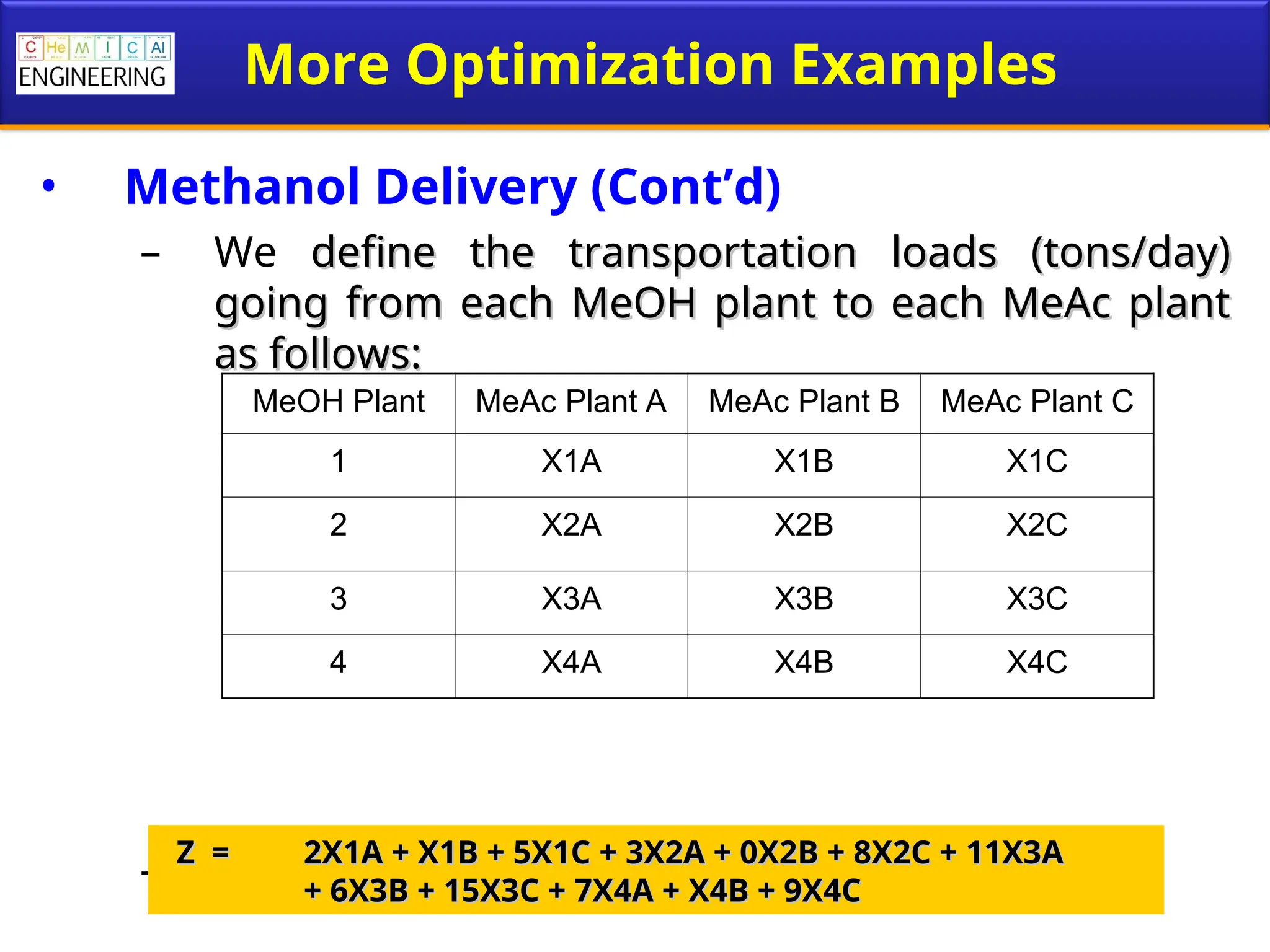
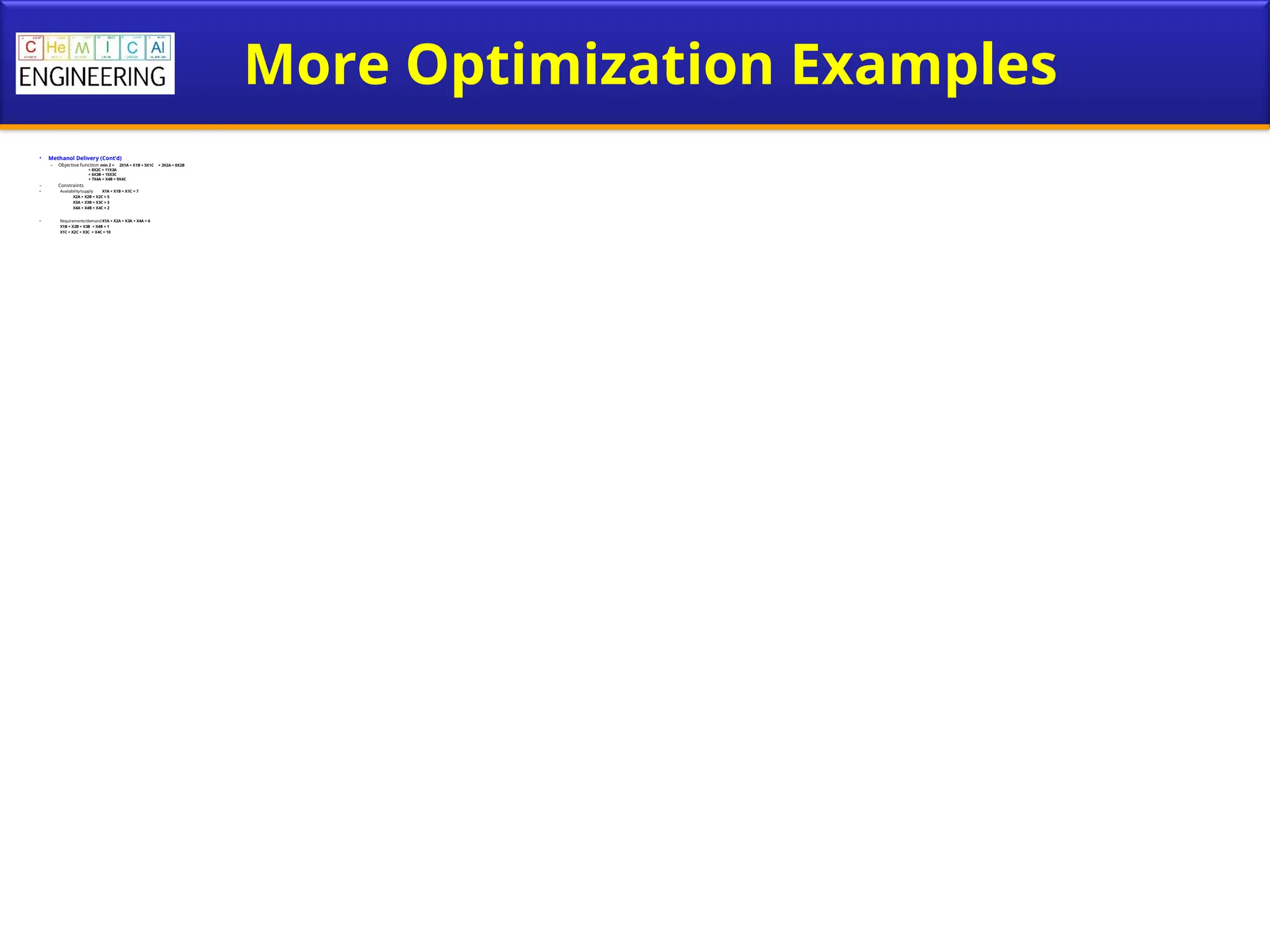
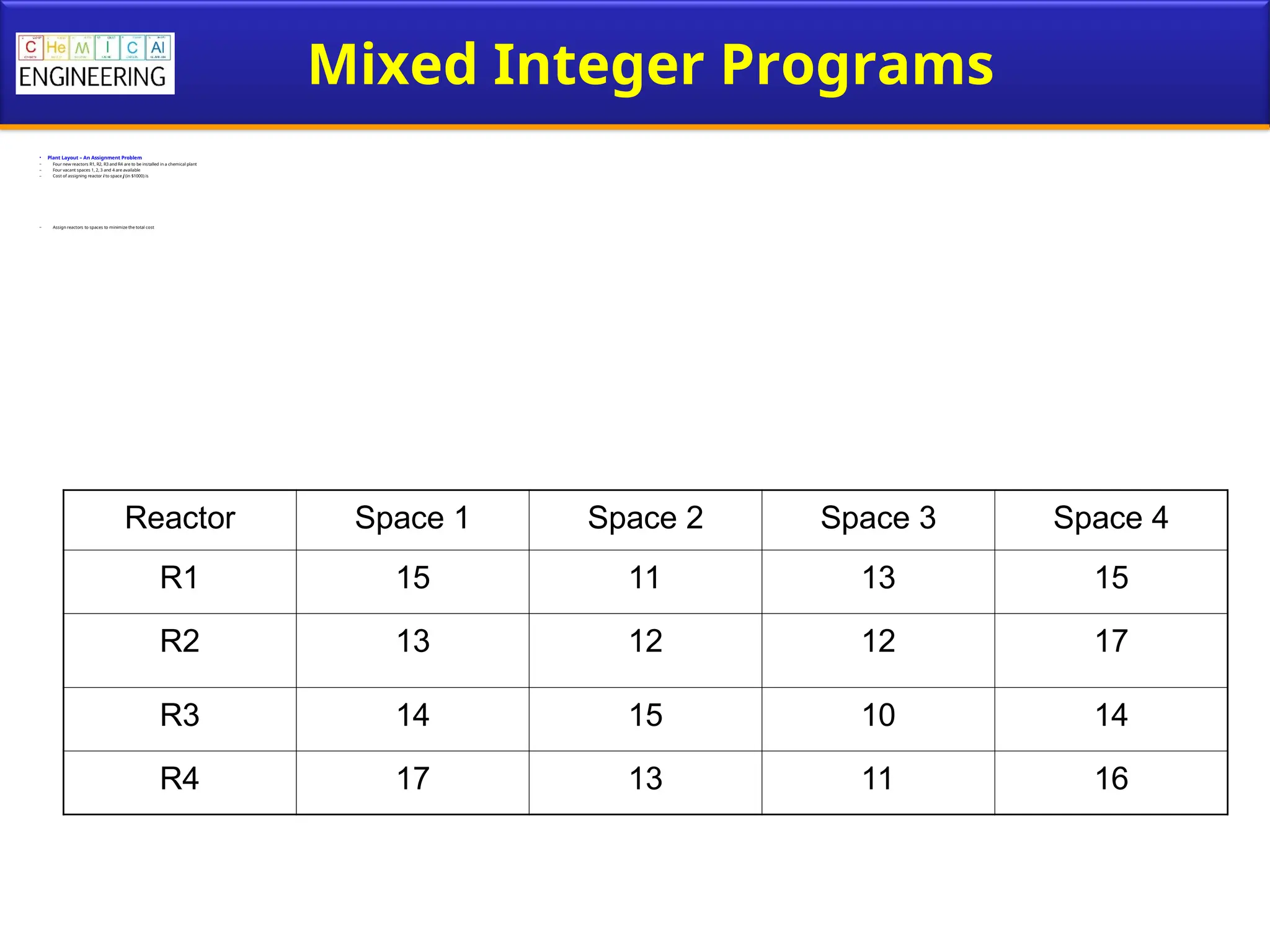
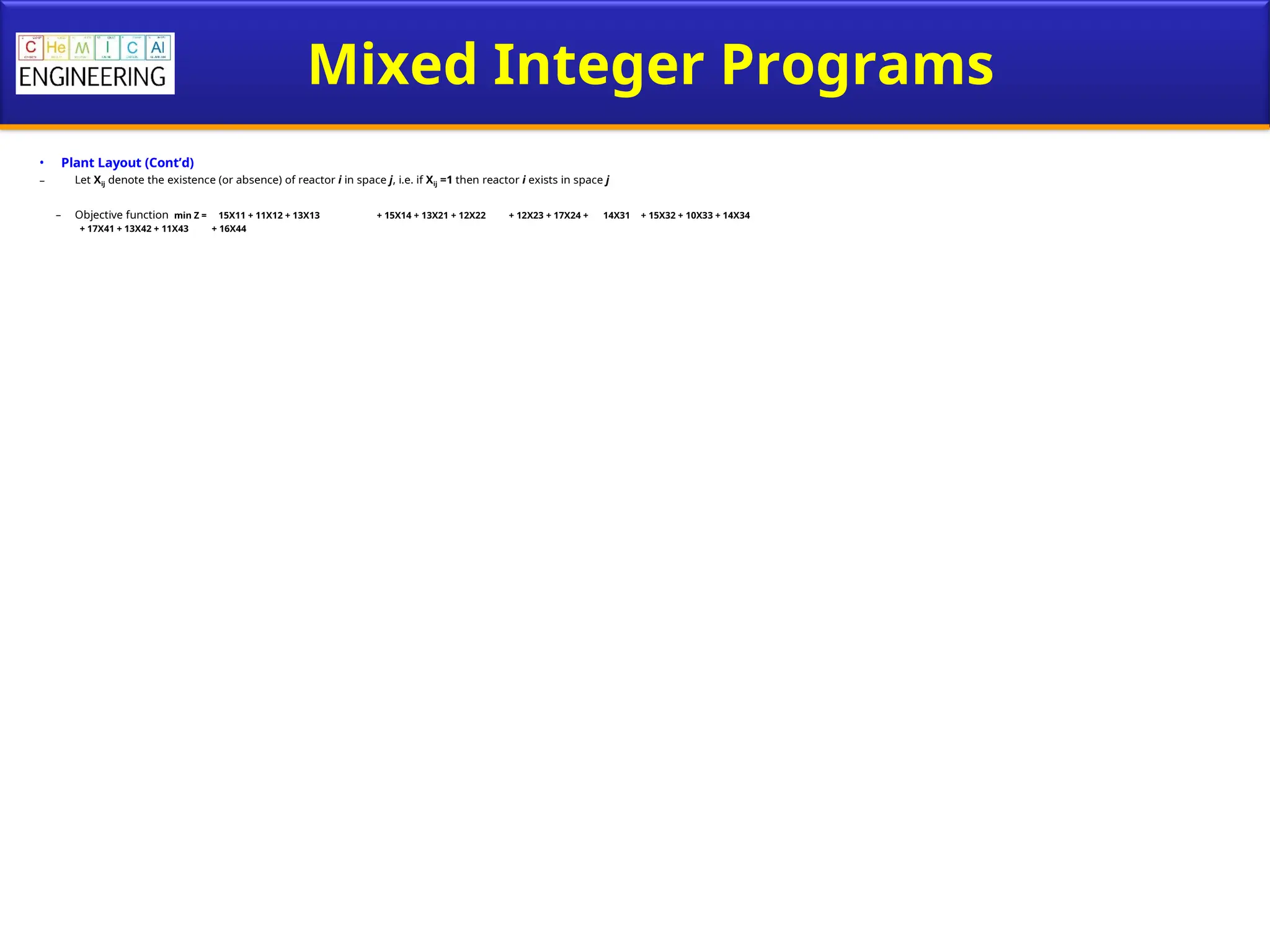
The document focuses on mathematical optimization within the context of chemical engineering education, discussing various optimization problems, their formulations, and classifications such as linear and non-linear programming. It provides examples such as optimizing reactor conversion, minimizing costs for solutions, and the assignment problem in plant layouts. Additionally, it emphasizes the principles of fair use regarding copyrighted educational materials used during online learning due to COVID-19.





























































































![ANPARA THERMAL POWER STATION[1] sangam.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/anparathermalpowerstation1sangam-251121115219-9261cde4-thumbnail.jpg?width=640&height=640&fit=bounds)







