Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
AhmedHussein521234
PDF, PPTX
100 views
INTRODUCTION AUTONOMOUS SYSTEMS LECTURE NOTES
INTRODUCTION AUTONOMOUS SYSTEMS
Engineering
◦
Related topics:
Autonomous Systems
•
Read more
0
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 40
2
/ 40
Most read
3
/ 40
4
/ 40
5
/ 40
6
/ 40
7
/ 40
8
/ 40
9
/ 40
10
/ 40
11
/ 40
12
/ 40
13
/ 40
14
/ 40
Most read
15
/ 40
16
/ 40
17
/ 40
18
/ 40
19
/ 40
20
/ 40
21
/ 40
22
/ 40
23
/ 40
24
/ 40
25
/ 40
26
/ 40
27
/ 40
28
/ 40
29
/ 40
30
/ 40
31
/ 40
32
/ 40
33
/ 40
34
/ 40
35
/ 40
36
/ 40
37
/ 40
38
/ 40
39
/ 40
40
/ 40
Most read
More Related Content
PPTX
VLSI Design Methodologies
by
Keshav
PPTX
Motor driver
by
Robotix 2011
PPTX
Tactile sensors and their robotic applications
by
Aasheesh Tandon
PPTX
Game Design Process
by
Martin Sillaots
PPT
AVR Fundamentals
by
Vinit Vyas
PDF
Modern Control - Lec07 - State Space Modeling of LTI Systems
by
Amr E. Mohamed
PPTX
Smart Steps Presentation
by
Rich Simmonds (LION)
PPT
Are video games art?
by
paddywroks
VLSI Design Methodologies
by
Keshav
Motor driver
by
Robotix 2011
Tactile sensors and their robotic applications
by
Aasheesh Tandon
Game Design Process
by
Martin Sillaots
AVR Fundamentals
by
Vinit Vyas
Modern Control - Lec07 - State Space Modeling of LTI Systems
by
Amr E. Mohamed
Smart Steps Presentation
by
Rich Simmonds (LION)
Are video games art?
by
paddywroks
What's hot
PPTX
73854-drone powerpoint templates.pptx
by
ahmedchammam
PDF
Approaches for Power Management Verification of SOC
by
DVClub
PPT
Core of the ES
by
VijayKumar5738
PDF
Introduction To Embedded Systems
by
anishgoel
PDF
Human machine interface
by
R A Akerkar
PPT
STate Space Analysis
by
Hussain K
PPTX
Introduction to Robotics
by
Garvit Arya
PPTX
Obstacle Avoidance ROBOT using ARDUINO
by
jovin Richard
PPTX
Pick and place robot ppt
by
svsanthoshkumar
PPTX
Arduino Interfacing with different sensors and motor
by
Amarjeetsingh Thakur
PPTX
Obstacle Avoidance Robotic Vehicle
by
Edgefxkits & Solutions
PPTX
Clock divider by 3
by
Ashok Reddy
PPT
Kinematic models and constraints.ppt
by
ssuser8698eb
DOCX
Autonomous Robotic Cleaner (ARC)
by
Hanna Diaz
PPTX
Textual Robot programming
by
CHEMGLOBE
PDF
Unit 3 Sensors and Actuators.pdf
by
ZoyaAli844417
PPTX
faults in digital systems
by
dennis gookyi
PPTX
Robotics of Quadruped Robot
by
홍배 김
PPTX
Proteus Circuit Simulation
by
Abdul Haseeb
PPTX
EC8791 UML-model train controller
by
RajalakshmiSermadurai
73854-drone powerpoint templates.pptx
by
ahmedchammam
Approaches for Power Management Verification of SOC
by
DVClub
Core of the ES
by
VijayKumar5738
Introduction To Embedded Systems
by
anishgoel
Human machine interface
by
R A Akerkar
STate Space Analysis
by
Hussain K
Introduction to Robotics
by
Garvit Arya
Obstacle Avoidance ROBOT using ARDUINO
by
jovin Richard
Pick and place robot ppt
by
svsanthoshkumar
Arduino Interfacing with different sensors and motor
by
Amarjeetsingh Thakur
Obstacle Avoidance Robotic Vehicle
by
Edgefxkits & Solutions
Clock divider by 3
by
Ashok Reddy
Kinematic models and constraints.ppt
by
ssuser8698eb
Autonomous Robotic Cleaner (ARC)
by
Hanna Diaz
Textual Robot programming
by
CHEMGLOBE
Unit 3 Sensors and Actuators.pdf
by
ZoyaAli844417
faults in digital systems
by
dennis gookyi
Robotics of Quadruped Robot
by
홍배 김
Proteus Circuit Simulation
by
Abdul Haseeb
EC8791 UML-model train controller
by
RajalakshmiSermadurai
Similar to INTRODUCTION AUTONOMOUS SYSTEMS LECTURE NOTES
PPTX
Cobots presentation for industrial applications
by
ssusere8a145
PPT
Behavior-based robotics
by
Preet Kanwal
PPT
1_1 Introduction to Robotics.ppt
by
seemasylvester
PDF
A Primer on Robotics
by
ijtsrd
PPTX
Introduction to Robotics process automation.pptx
by
Thasnishameer
PPTX
INTRODUCTION-TO-AUTOMATION-TECHNOLOGY (1).pptx
by
maningojewel7
PPTX
Introduction to Robotics Arduino UNO.pptx
by
shoban4145
PPTX
Emerging trends 1-Grp14.pptx
by
kimulikyobe1
PPTX
introduction to Robotics (the role of computer science)
by
RajeshSharma1041
PDF
Introduction to robotics and the advantages
by
Raveendran2
PPTX
Robotic introduction
by
Mohammad Sabouri
PPTX
Seminar PPT.pptx
by
YashBhowate2
PPT
enhance human capabilities, increase safety, and drive efficiency
by
trgiipm
PPT
robotS AND ROBOTICSOF HUMANS AND MACHINES
by
HimanshuJethwani
PPT
robots.ppt
by
aLife19
PPT
robots.ppt
by
UmaDeviAnanth
PDF
2017 04-20 hlavacautonomroboticsinczechrep
by
Roman Holy
PPTX
Group-3-Robotics.pptx
by
DavidAlesna1
PPT
Robotics
by
Hasnaeen Rahman
PPTX
Robotics ppt for computer science students.pptx
by
ShashankChaturvedi48
Cobots presentation for industrial applications
by
ssusere8a145
Behavior-based robotics
by
Preet Kanwal
1_1 Introduction to Robotics.ppt
by
seemasylvester
A Primer on Robotics
by
ijtsrd
Introduction to Robotics process automation.pptx
by
Thasnishameer
INTRODUCTION-TO-AUTOMATION-TECHNOLOGY (1).pptx
by
maningojewel7
Introduction to Robotics Arduino UNO.pptx
by
shoban4145
Emerging trends 1-Grp14.pptx
by
kimulikyobe1
introduction to Robotics (the role of computer science)
by
RajeshSharma1041
Introduction to robotics and the advantages
by
Raveendran2
Robotic introduction
by
Mohammad Sabouri
Seminar PPT.pptx
by
YashBhowate2
enhance human capabilities, increase safety, and drive efficiency
by
trgiipm
robotS AND ROBOTICSOF HUMANS AND MACHINES
by
HimanshuJethwani
robots.ppt
by
aLife19
robots.ppt
by
UmaDeviAnanth
2017 04-20 hlavacautonomroboticsinczechrep
by
Roman Holy
Group-3-Robotics.pptx
by
DavidAlesna1
Robotics
by
Hasnaeen Rahman
Robotics ppt for computer science students.pptx
by
ShashankChaturvedi48
Recently uploaded
PDF
Fluid-Mechanics with question and answer.pdf
by
sparunkumar1
PPTX
thermal_design_project_work_internship(updated)-1.pptx
by
shahveer210504
PDF
Event #3_ Build a Gemini Bot, Together with GitHub_private.pdf
by
3526ming
PDF
A Guide to Marine Air Compressors on Ships
by
Mahmoud Moghtaderi
PPTX
William Mulholland and the St. Francis Dam Disaster
by
Bob Mayer
PDF
HYDRAULIC TURBINES with question and answer.pdf
by
sparunkumar1
PDF
MODULE FOUR THEODOLITE SURVEY SY CIVIL 5449
by
Dr. BASWESHWAR JIRWANKAR
PPT
Verilog - FPGA data path controller Design Sequential circuit FSM based
by
kirtipfraoa
PDF
Modularity In Lyra - A new studio's experiences building their prototype on U...
by
patrickcastillo41
PDF
Register Now - 3rd International Conference on AI & Civil Engineering (AICiVi...
by
ieijjournal
PDF
Workshop practice theory course (Unit-1) By Varun Pratap Singh.pdf
by
Varun Pratap Singh
PDF
Best Marketplaces to Buy Snapchat Accounts in 2025.pdf
by
ys3ik6l8c3ftbz
PDF
Module-3_Deep Learning_22ISE74A_ISE_.pdf
by
Dr. Shivashankar
PDF
Decarbonizing Healthcare: Exploring the Potential for Electrification with IESVE
by
IES VE
PPTX
State Space Model of DC-DC Boost Converter
by
Porselvi T
PPTX
TRAY DRYER by Gulshan Athbhaiya.pptx
by
Gulshan Athbhaiya
DOCX
Kabirpawarpptof java practicalexp1 to 11.docx
by
nkpawar4413
PPTX
33 KV SUBSTATION.pptx FROM LAYOUT TO PROTECTION
by
PradipChanda5
PPTX
Joseph Hill Honors Thesis Presentation 2024
by
JoeHill71
PDF
Existing Building Survey - Edi Supriyanto & Partners.pdf
by
ProjectEngineer4
Fluid-Mechanics with question and answer.pdf
by
sparunkumar1
thermal_design_project_work_internship(updated)-1.pptx
by
shahveer210504
Event #3_ Build a Gemini Bot, Together with GitHub_private.pdf
by
3526ming
A Guide to Marine Air Compressors on Ships
by
Mahmoud Moghtaderi
William Mulholland and the St. Francis Dam Disaster
by
Bob Mayer
HYDRAULIC TURBINES with question and answer.pdf
by
sparunkumar1
MODULE FOUR THEODOLITE SURVEY SY CIVIL 5449
by
Dr. BASWESHWAR JIRWANKAR
Verilog - FPGA data path controller Design Sequential circuit FSM based
by
kirtipfraoa
Modularity In Lyra - A new studio's experiences building their prototype on U...
by
patrickcastillo41
Register Now - 3rd International Conference on AI & Civil Engineering (AICiVi...
by
ieijjournal
Workshop practice theory course (Unit-1) By Varun Pratap Singh.pdf
by
Varun Pratap Singh
Best Marketplaces to Buy Snapchat Accounts in 2025.pdf
by
ys3ik6l8c3ftbz
Module-3_Deep Learning_22ISE74A_ISE_.pdf
by
Dr. Shivashankar
Decarbonizing Healthcare: Exploring the Potential for Electrification with IESVE
by
IES VE
State Space Model of DC-DC Boost Converter
by
Porselvi T
TRAY DRYER by Gulshan Athbhaiya.pptx
by
Gulshan Athbhaiya
Kabirpawarpptof java practicalexp1 to 11.docx
by
nkpawar4413
33 KV SUBSTATION.pptx FROM LAYOUT TO PROTECTION
by
PradipChanda5
Joseph Hill Honors Thesis Presentation 2024
by
JoeHill71
Existing Building Survey - Edi Supriyanto & Partners.pdf
by
ProjectEngineer4
INTRODUCTION AUTONOMOUS SYSTEMS LECTURE NOTES
1.
Autonomous Systems 2024©
Pedro Lima Introduction AUTONOMOUS SYSTEMS Pedro U. Lima Instituto Superior Técnico/Instituto de Sistemas e Robótica April 2024 Course Handouts All rights reserved INTRODUCTION
2.
Autonomous Systems 2024©
Pedro Lima Introduction Autonomous Systems What is an Autonomous System? 2
3.
Autonomous Systems 2024©
Pedro Lima Introduction Autonomous Systems 3 AUTONOMY From Greek αυτονομία autonomia, noun of quality from αυτόνομος autonomos “independent, living by one’s own laws”, from αυτο auto- “self” + νόμος nomos “custom, law”. In Wikipedia
4.
Autonomous Systems 2024©
Pedro Lima Introduction Autonomous Systems 4 SYSTEM From late Latin systēma, from Ancient Greek σύστημα (sustēma), “organised whole, body”), from σύν (sun), “with, together”) + ἵστημι (histēmi), “I stand”). A collection of organized things. A way of organizing or planning. A whole composed of relationships among the members. In Wikipedia
5.
Autonomous Systems 2024©
Pedro Lima Introduction Autonomous Systems 5 AUTONOMOUS SYSTEM A collection of organized things, composed of relationships among them, and capable of living independently by its own laws
6.
Autonomous Systems 2024©
Pedro Lima Introduction Autonomous Systems 6 AUTONOMOUS AGENT An agent is anything that can be viewed as perceiving its environment through sensors and acting upon that environment through effectors (Russel & Norvig, 1995). Jennings and Wooldridge have three key concepts for an agent: • situatedness, • autonomy, • flexibility
7.
Autonomous Systems 2024©
Pedro Lima Introduction 8 AUTONOMOUS AGENTS • should be able to learn from experience • should be able to interact and even cooperate with other autonomous agents • should have means of handling the uncertainty associated to its sensor inputs and the effects of its actions over a surrounding , possibly dynamic, environment • should have means to take rational decisions, leading to some goal Autonomous Systems
8.
Autonomous Systems 2024©
Pedro Lima Introduction 9 Autonomous Systems AUTONOMOUS ROBOTS Autonomous robots are robots (embodied situated agents) which can perform desired tasks in unstructured environments without continuous human guidance. Many kinds of robots have some degree of autonomy. Different robots can be autonomous in different ways. In Wikipedia
9.
Autonomous Systems 2024©
Pedro Lima Introduction 10 Autonomous Systems AUTONOMOUS ROBOTS have the ability to • Gain information about the environment. • Work for an extended period without human intervention. • Move either all or part of itself throughout its operating environment without human assistance. • Avoid situations that are harmful to people, property, or itself. • An autonomous robot may also learn or gain new capabilities like adjusting strategies for accomplishing its task(s) or adapting to changing surroundings. In Wikipedia
10.
Autonomous Systems 2024©
Pedro Lima Introduction Artificial Intelligence vs Intelligent Robotics
11.
Autonomous Systems 2024©
Pedro Lima Introduction Advanced Robots
12.
Autonomous Systems 2024©
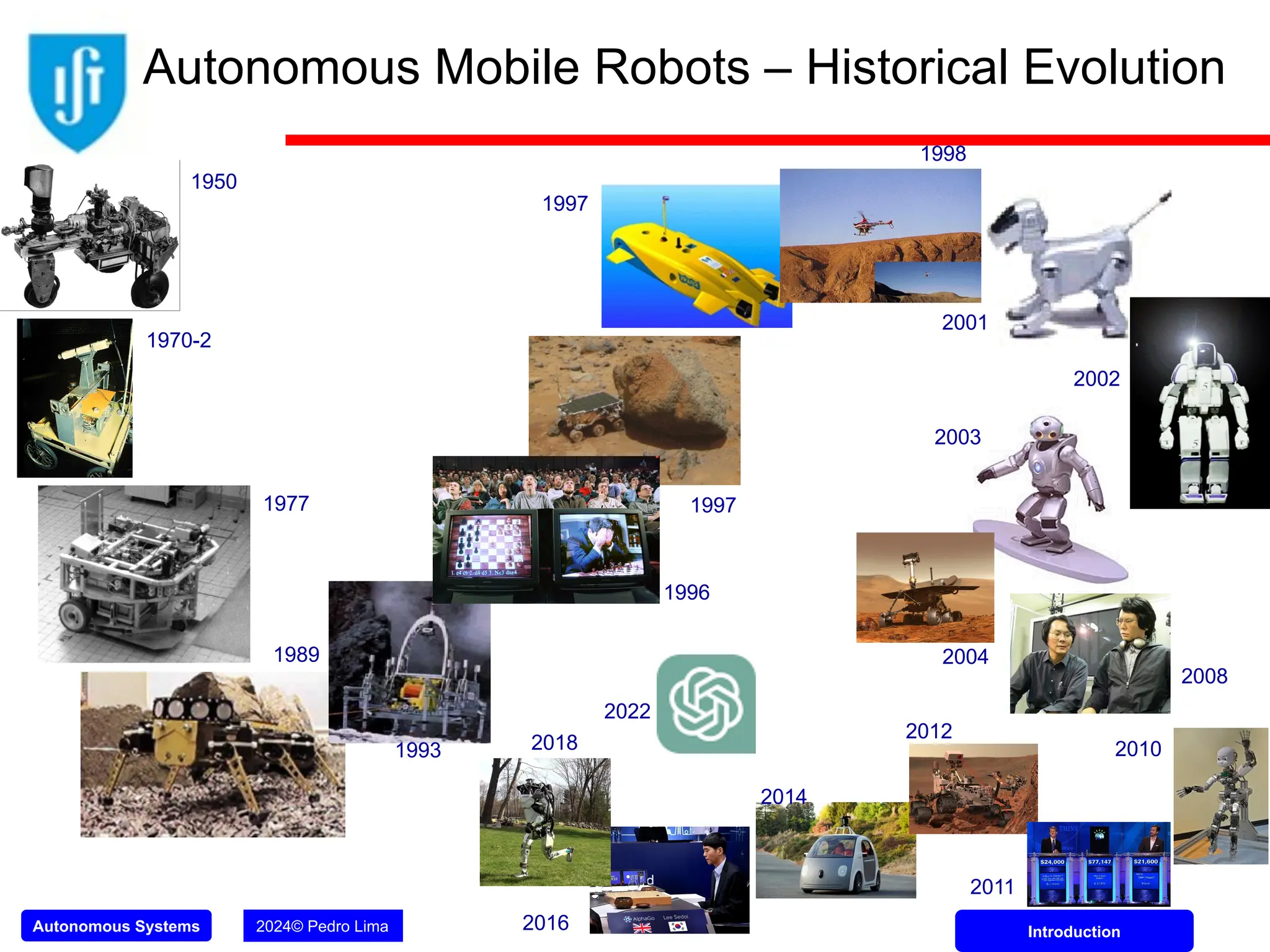
Pedro Lima Introduction 1950 1970-2 1977 1997 1989 1997 1998 1993 2002 2001 2003 Autonomous Mobile Robots – Historical Evolution 2008 2010 2004 2014 2012 2016 1996 2011 2018 2022
13.
Autonomous Systems 2024©
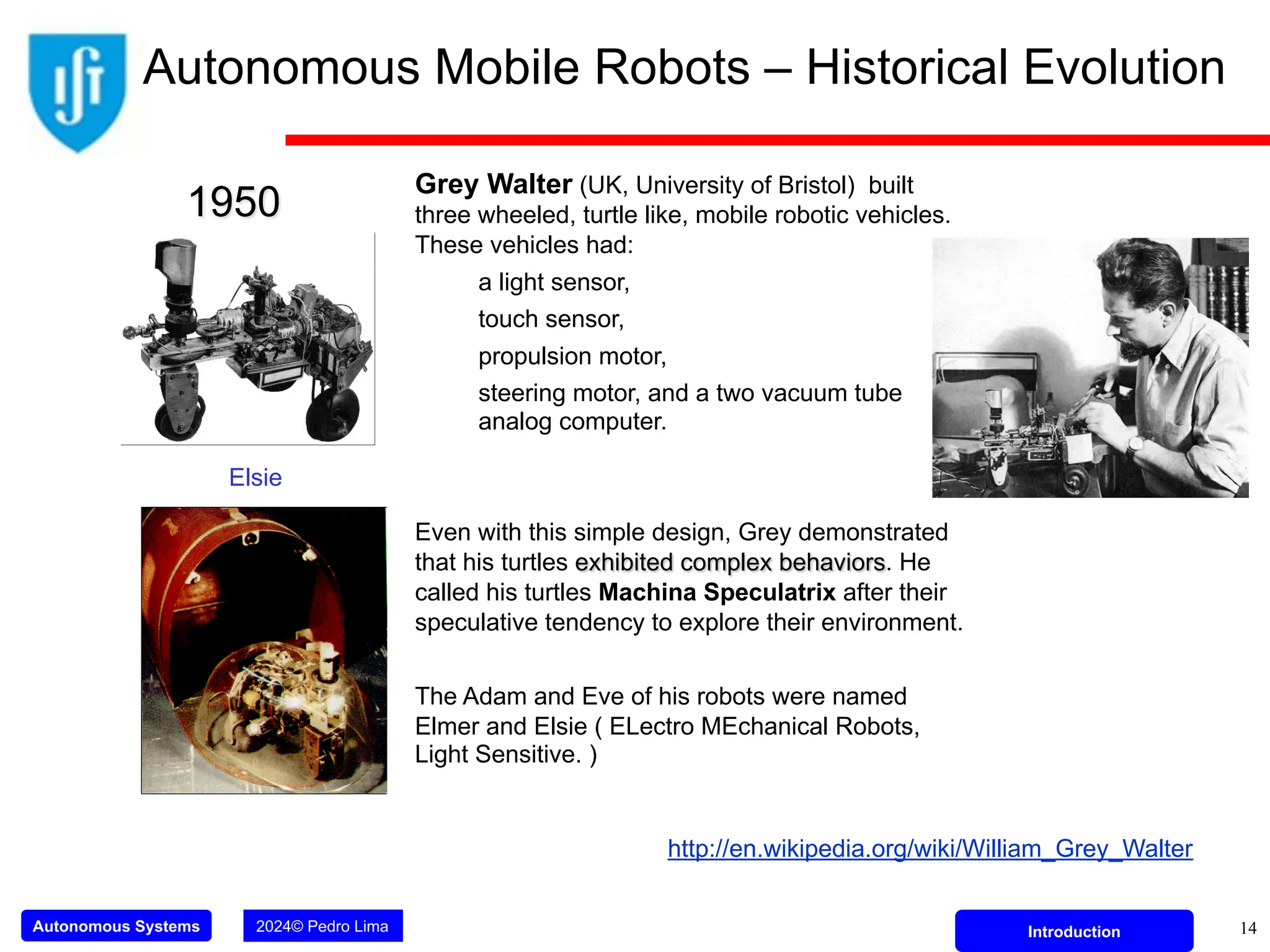
Pedro Lima Introduction Grey Walter (UK, University of Bristol) built three wheeled, turtle like, mobile robotic vehicles. These vehicles had: a light sensor, touch sensor, propulsion motor, steering motor, and a two vacuum tube analog computer. Even with this simple design, Grey demonstrated that his turtles exhibited complex behaviors. He called his turtles Machina Speculatrix after their speculative tendency to explore their environment. The Adam and Eve of his robots were named Elmer and Elsie ( ELectro MEchanical Robots, Light Sensitive. ) 1950 http://en.wikipedia.org/wiki/William_Grey_Walter Elsie 14 Autonomous Mobile Robots – Historical Evolution
14.
Autonomous Systems 2024©
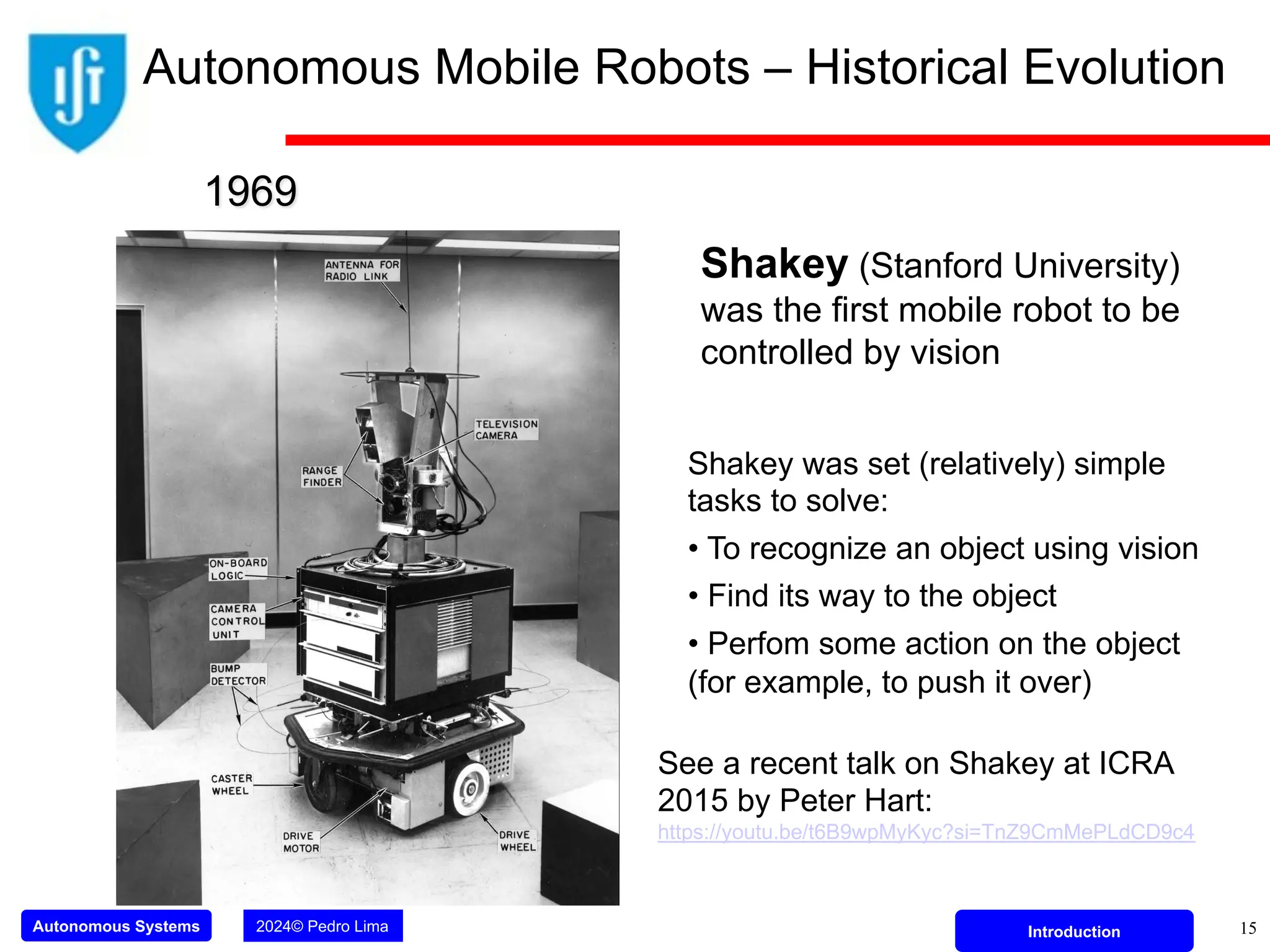
Pedro Lima Introduction Shakey (Stanford University) was the first mobile robot to be controlled by vision 1969 Shakey was set (relatively) simple tasks to solve: • To recognize an object using vision • Find its way to the object • Perfom some action on the object (for example, to push it over) 15 Autonomous Mobile Robots – Historical Evolution See a recent talk on Shakey at ICRA 2015 by Peter Hart: https://youtu.be/t6B9wpMyKyc?si=TnZ9CmMePLdCD9c4
15.
Autonomous Systems 2024©
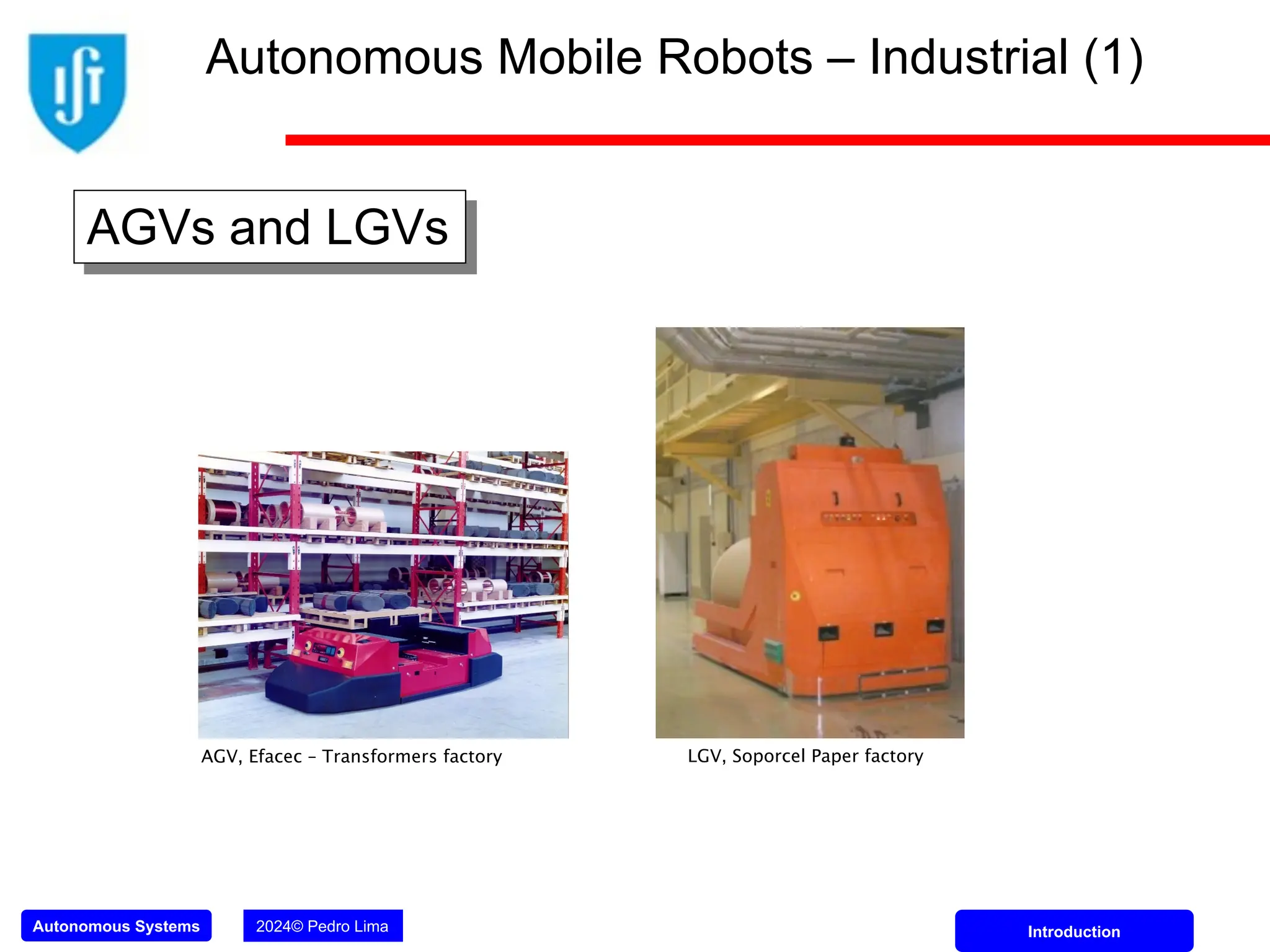
Pedro Lima Introduction AGV, Efacec – Transformers factory LGV, Soporcel Paper factory Autonomous Mobile Robots – Industrial (1) AGVs and LGVs
16.
Autonomous Systems 2024©
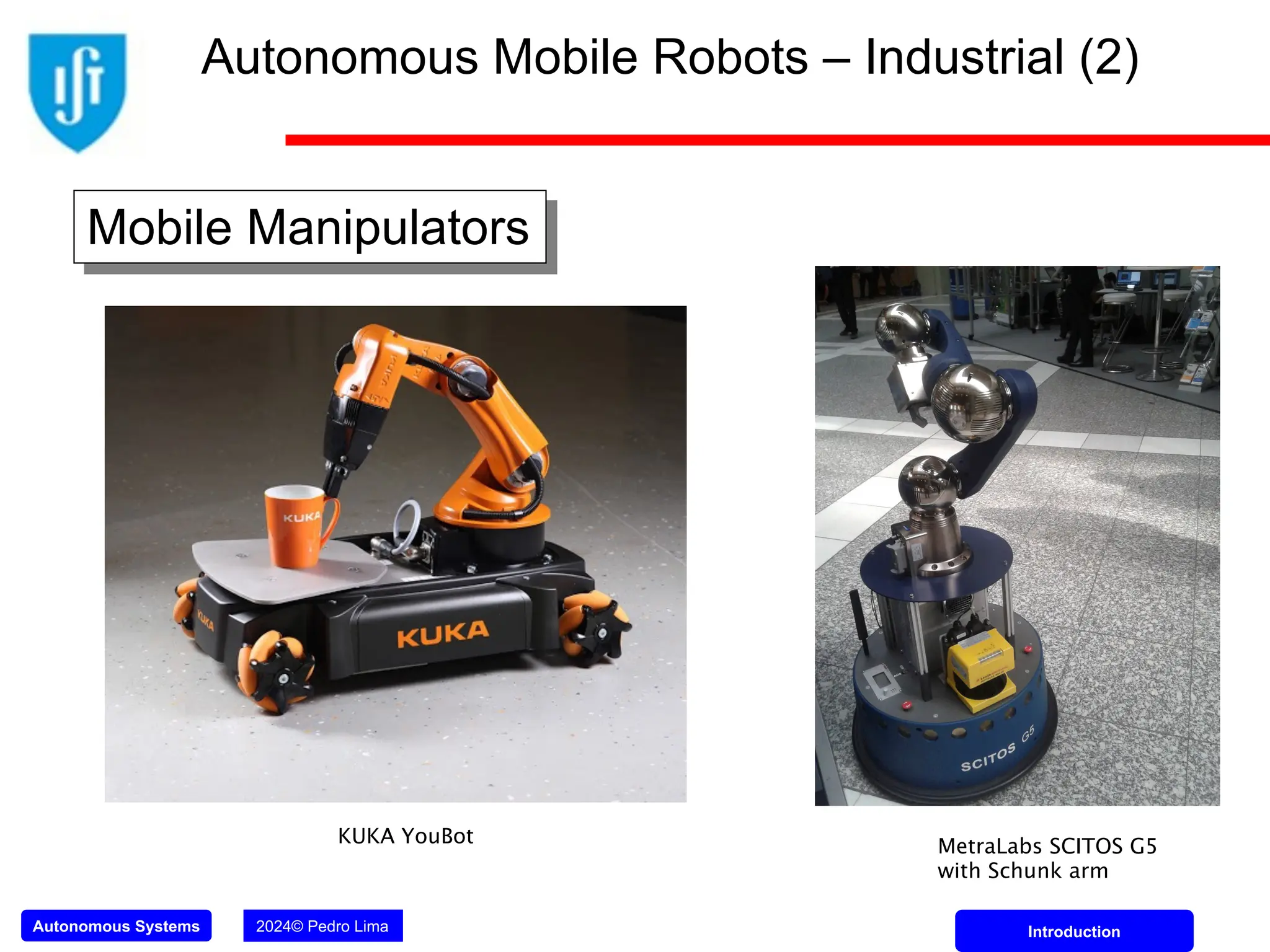
Pedro Lima Introduction Mobile Manipulators KUKA YouBot MetraLabs SCITOS G5 with Schunk arm Autonomous Mobile Robots – Industrial (2)
17.
Autonomous Systems 2024©
Pedro Lima Introduction KIVA Systems / Amazon Autonomous Mobile Robots – Industrial (3)
18.
Autonomous Systems 2024©
Pedro Lima Introduction BAXTER / Rethink Robotics BAXTER Autonomous Mobile Robots – Industrial (4)
19.
Autonomous Systems 2024©
Pedro Lima Introduction Autonomous Mobile Robots – Indoors
20.
Autonomous Systems 2024©
Pedro Lima Introduction Autonomous Mobile Robots – Field
21.
Autonomous Systems 2024©
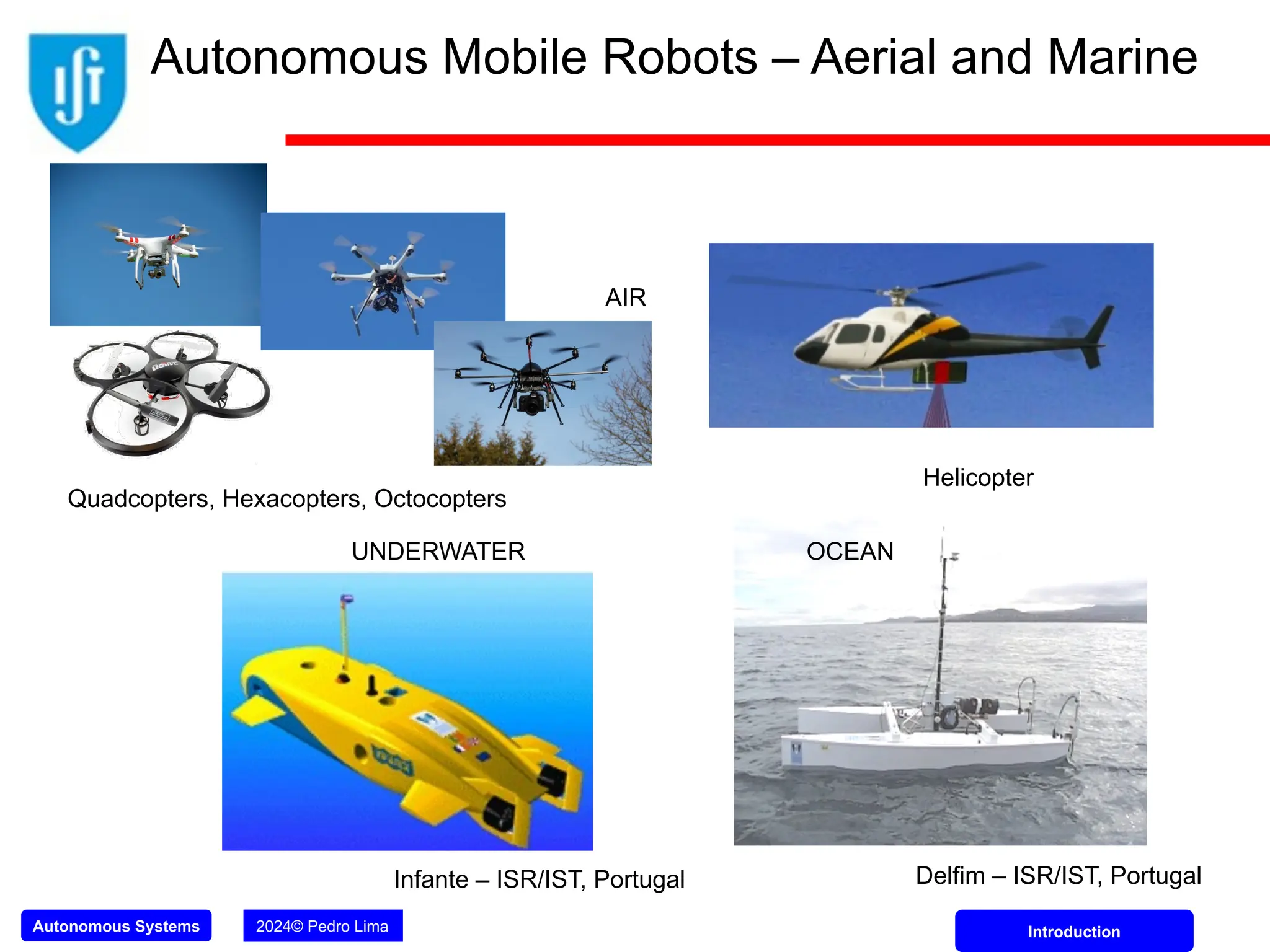
Pedro Lima Introduction Infante – ISR/IST, Portugal Helicopter AIR UNDERWATER OCEAN Delfim – ISR/IST, Portugal Autonomous Mobile Robots – Aerial and Marine Quadcopters, Hexacopters, Octocopters
22.
Autonomous Systems 2024©
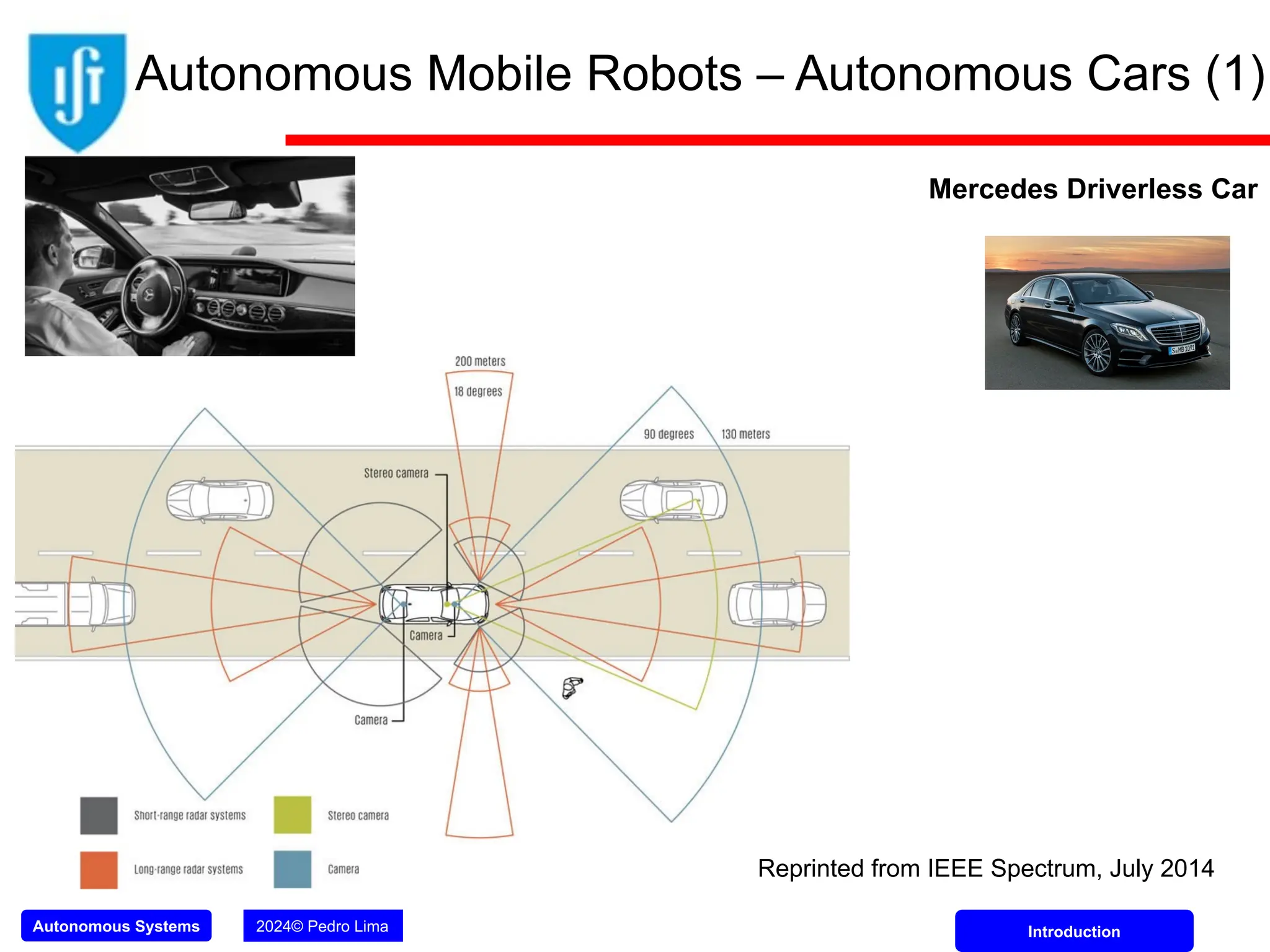
Pedro Lima Introduction Mercedes Driverless Car Autonomous Mobile Robots – Autonomous Cars (1) Reprinted from IEEE Spectrum, July 2014
23.
Autonomous Systems 2024©
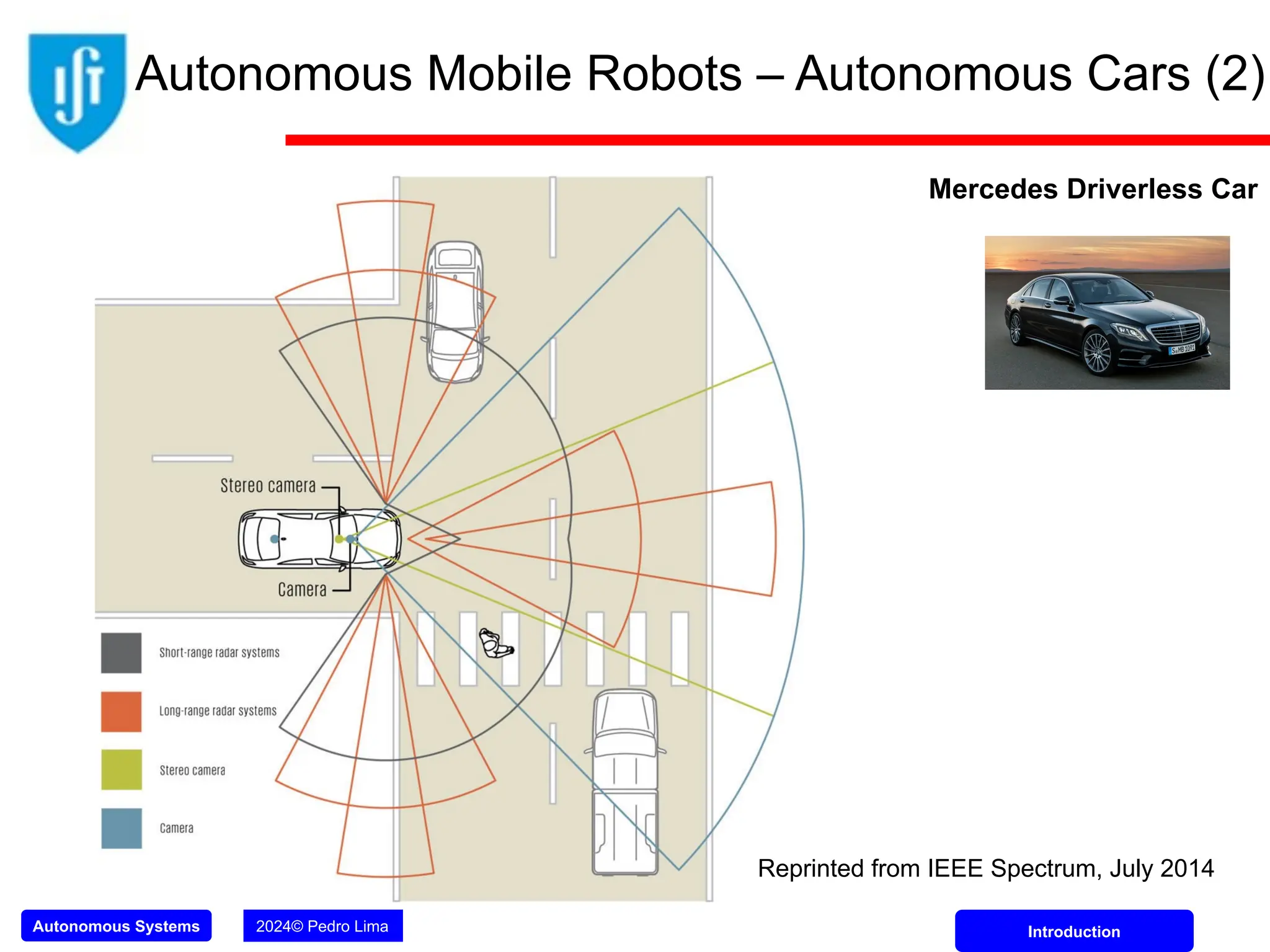
Pedro Lima Introduction Mercedes Driverless Car Autonomous Mobile Robots – Autonomous Cars (2) Reprinted from IEEE Spectrum, July 2014
24.
Autonomous Systems 2024©
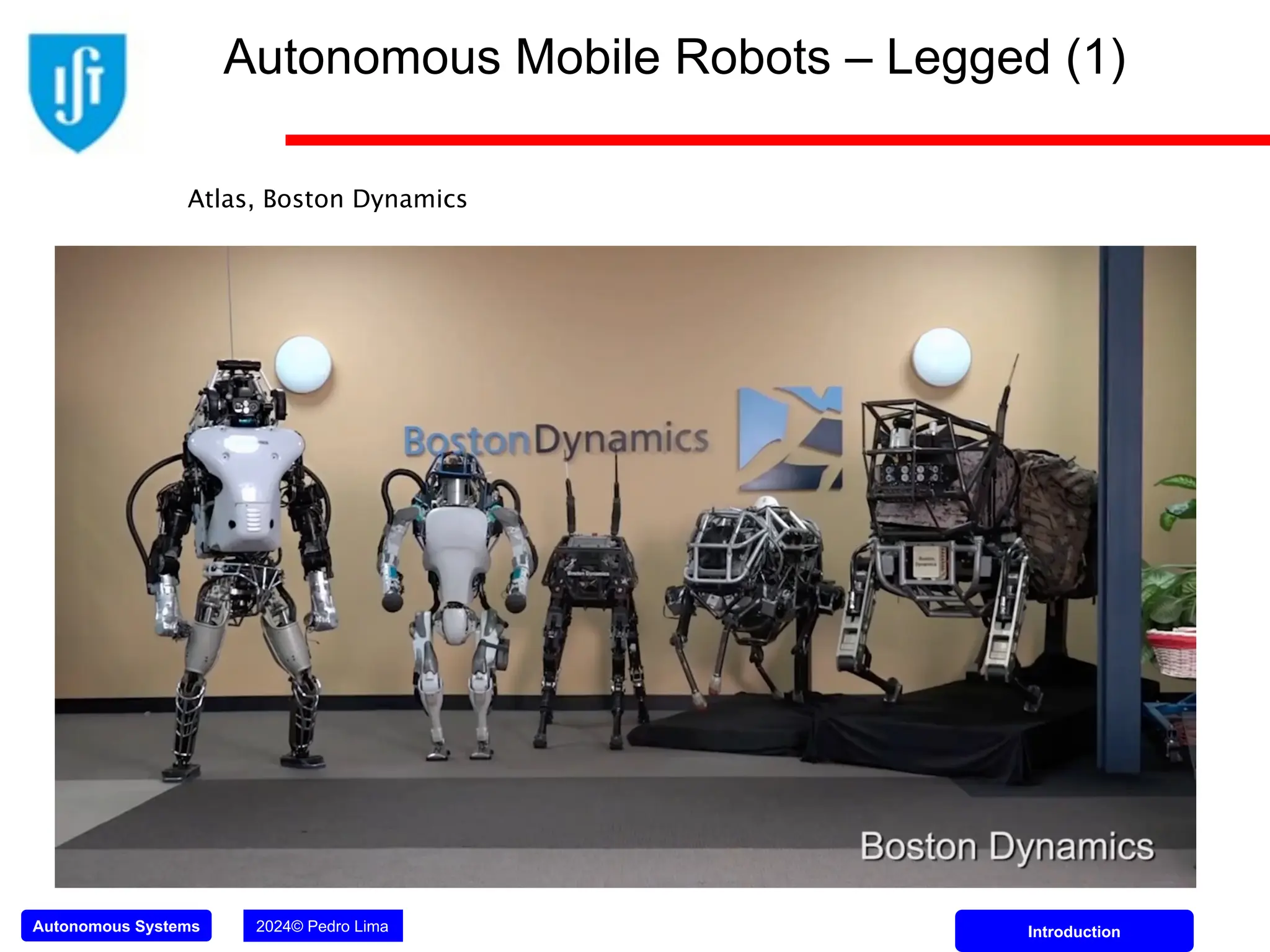
Pedro Lima Introduction Autonomous Mobile Robots – Legged (1) Atlas, Boston Dynamics
25.
Autonomous Systems 2024©
Pedro Lima Introduction Autonomous Mobile Robots – Legged (2) Quadrupede, Boston Dynamics
26.
Autonomous Systems 2024©
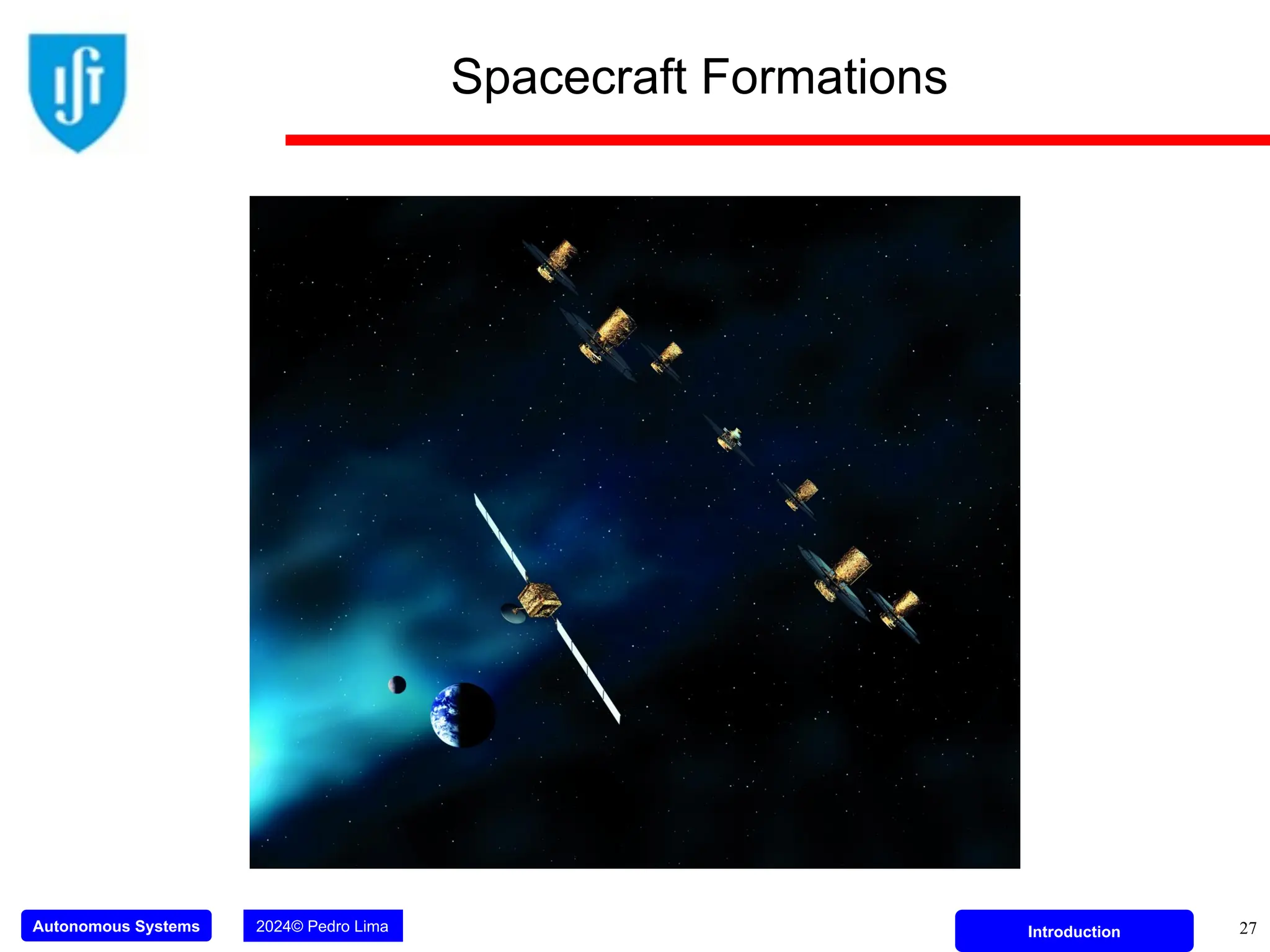
Pedro Lima Introduction Spacecraft Formations 27
27.
Autonomous Systems 2024©
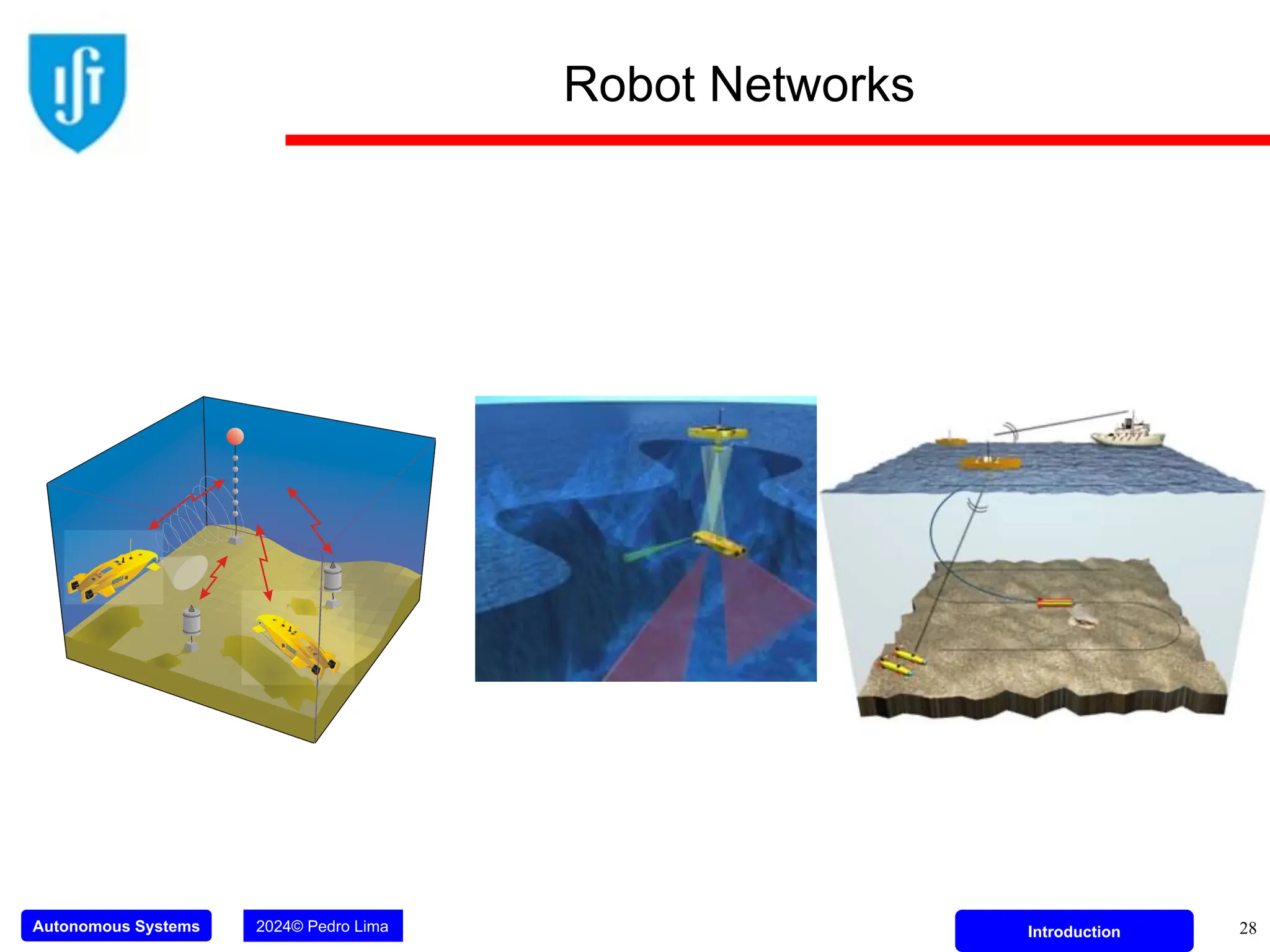
Pedro Lima Introduction Robot Networks 28
28.
Autonomous Systems 2024©
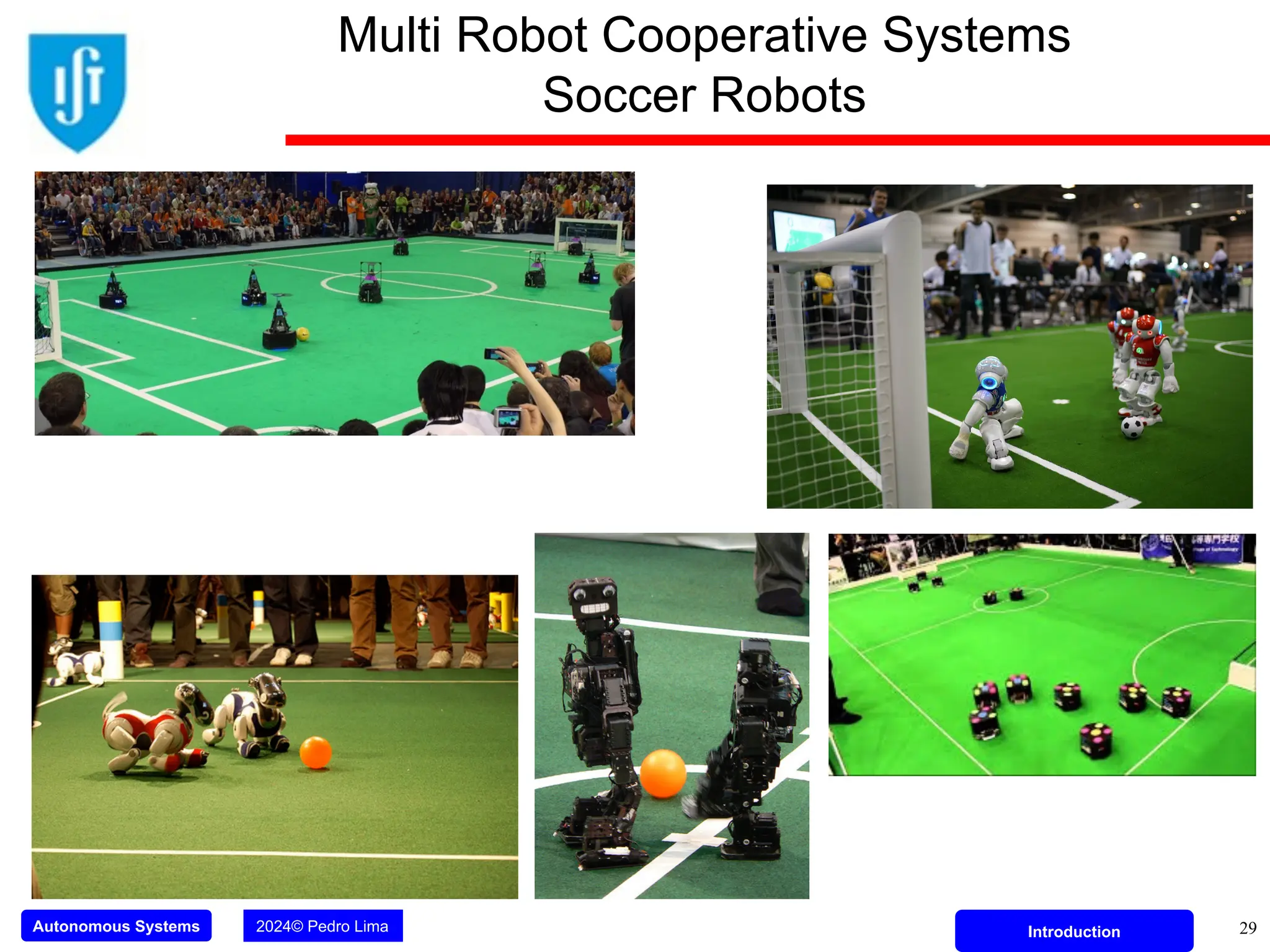
Pedro Lima Introduction 29 Multi Robot Cooperative Systems Soccer Robots
29.
Autonomous Systems 2024©
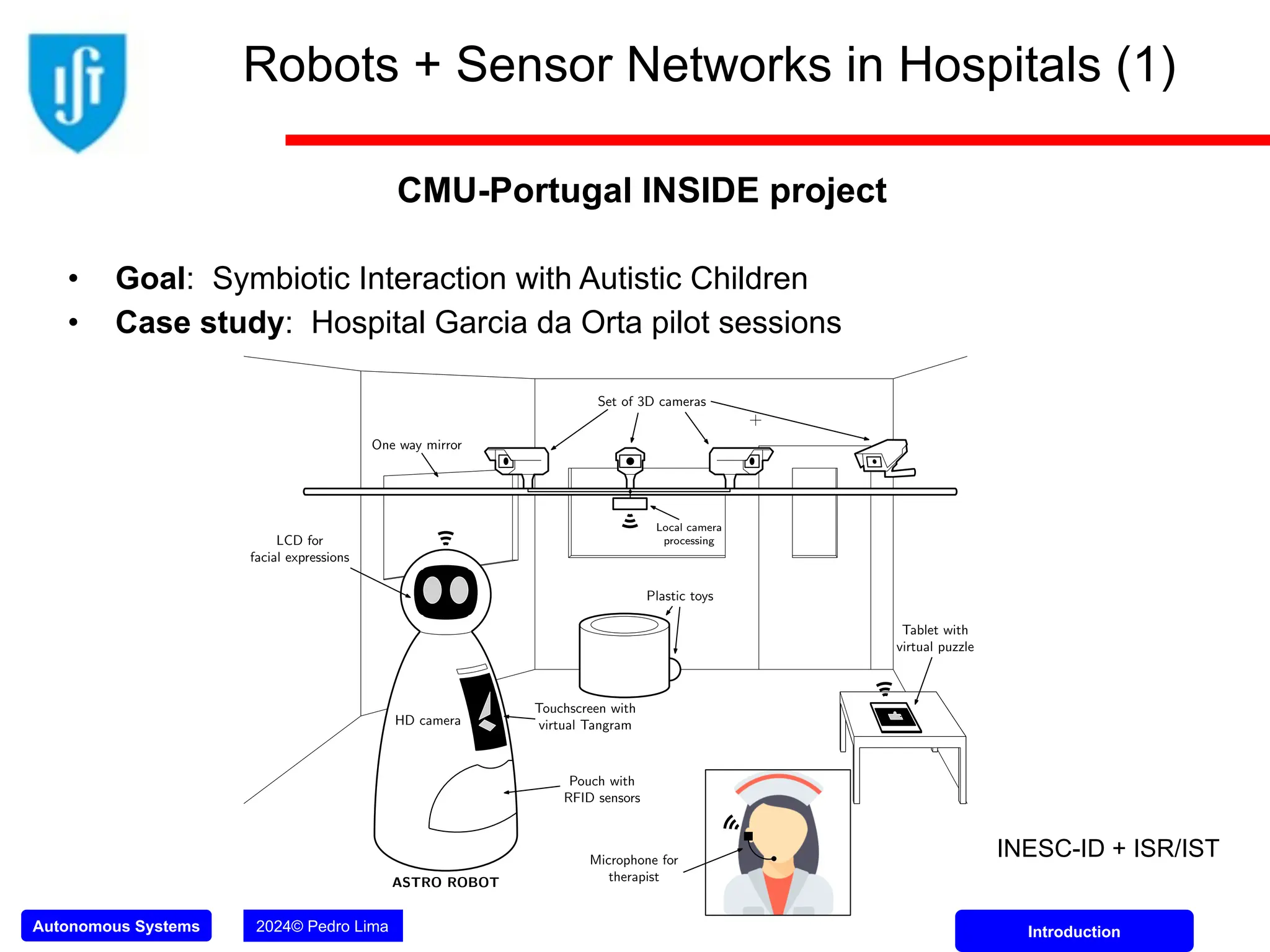
Pedro Lima Introduction Robots + Sensor Networks in Hospitals (1) • Goal: Symbiotic Interaction with Autistic Children • Case study: Hospital Garcia da Orta pilot sessions CMU-Portugal INSIDE project One way mirror Set of 3D cameras Plastic toys Tablet with virtual puzzle LCD for facial expressions ASTRO ROBOT Touchscreen with virtual Tangram Pouch with RFID sensors HD camera Local camera processing Microphone for therapist INESC-ID + ISR/IST
30.
Autonomous Systems 2024©
Pedro Lima Introduction Robots + Sensor Networks in Hospitals (2) CMU-Portugal INSIDE project INESC-ID + ISR/IST
31.
Autonomous Systems 2024©
Pedro Lima Introduction FP7 MOnarCH (Multi-Robot Cognitive Systems Operating in Hospitals) (Coordinated by ISR/IST) Robots + Sensor Networks in Hospitals (3)
32.
Autonomous Systems 2024©
Pedro Lima Introduction MBOT / “Gasparzinho” Evolution IDMind + ISR/IST
33.
Autonomous Systems 2024©
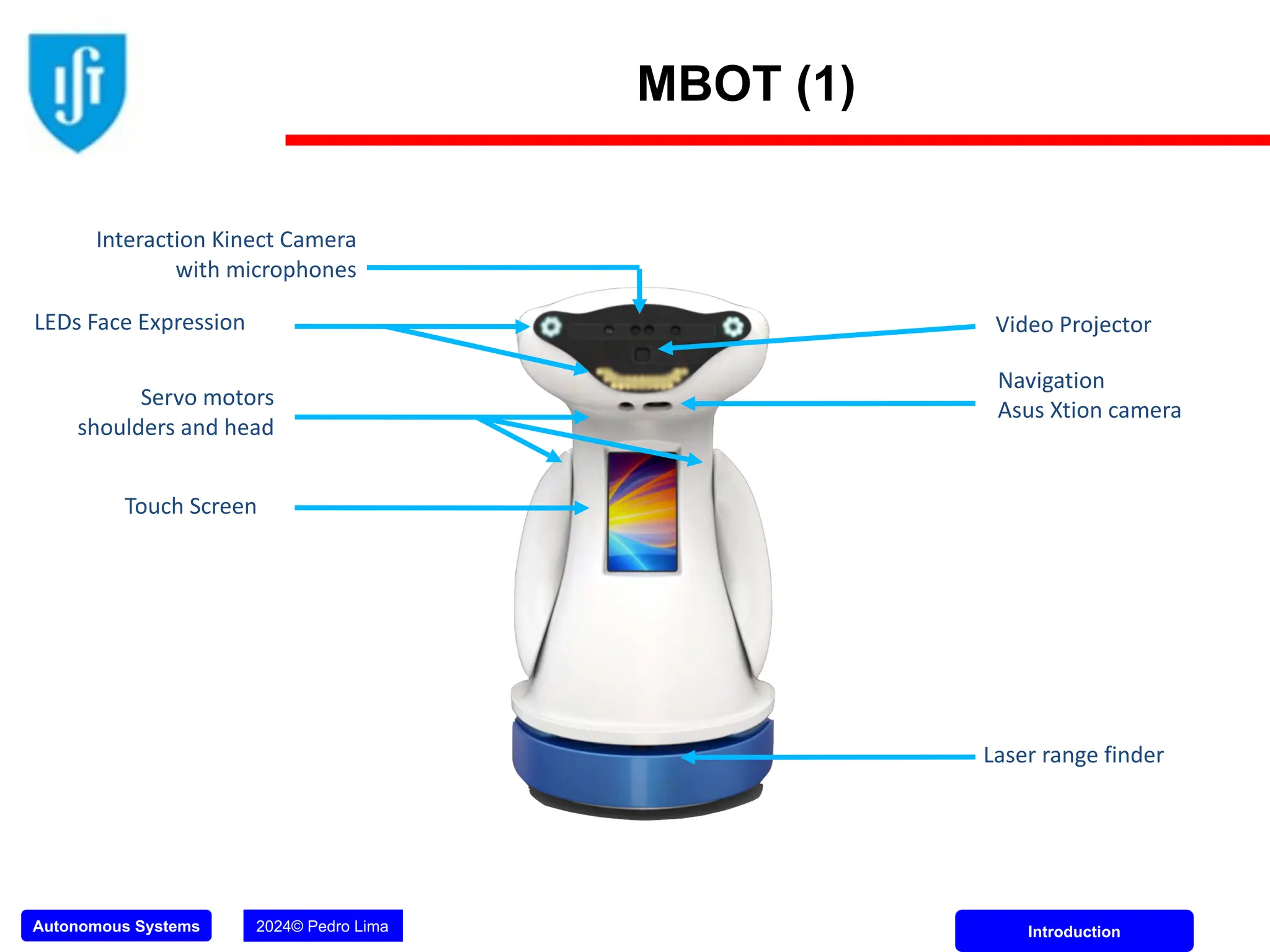
Pedro Lima Introduction MBOT (1) Touch Screen Video Projector LEDs Face Expression Interaction Kinect Camera with microphones Laser range finder Navigation Asus Xtion camera Servo motors shoulders and head
34.
Autonomous Systems 2024©
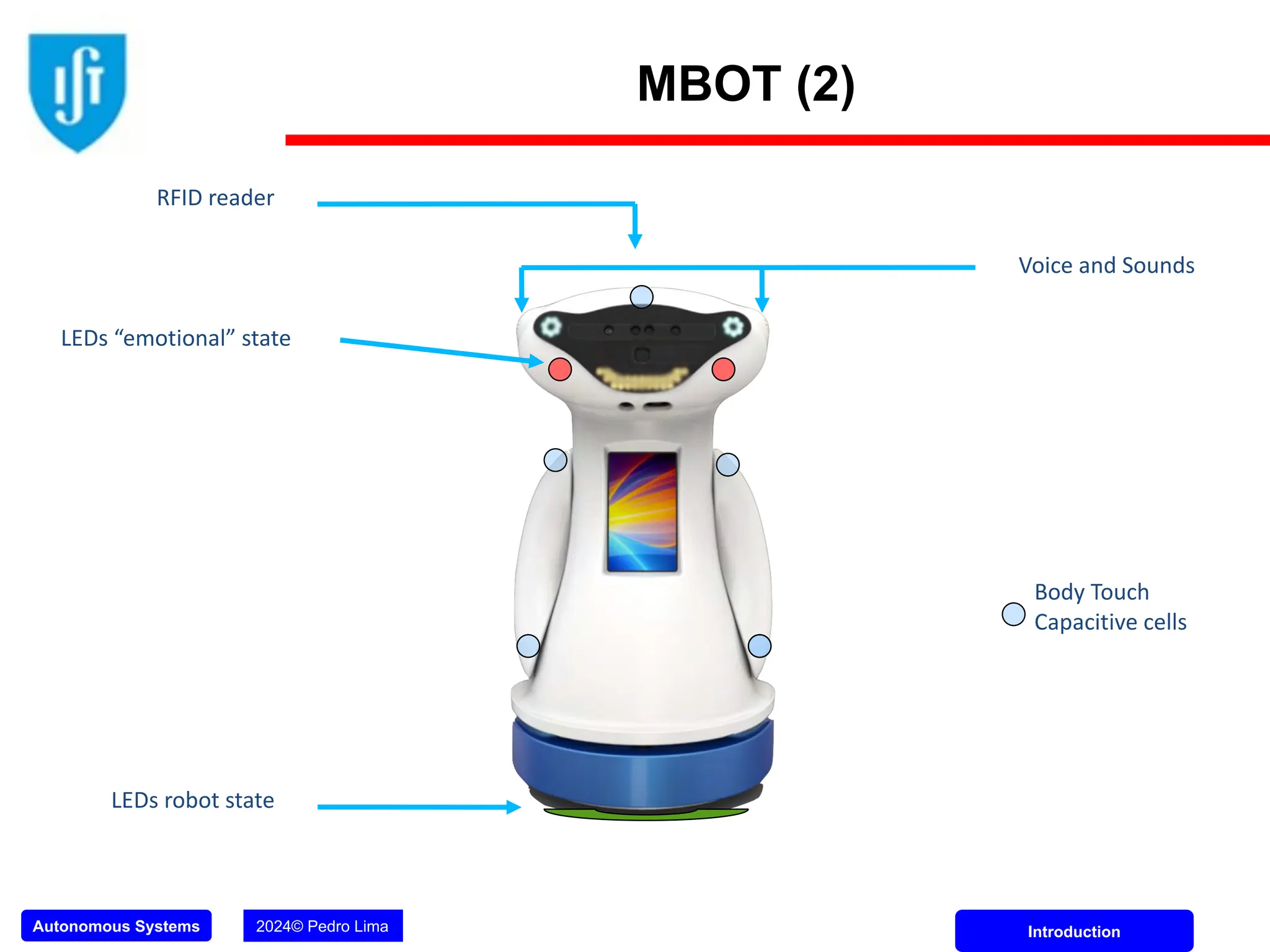
Pedro Lima Introduction Body Touch Capacitive cells Voice and Sounds LEDs “emotional” state LEDs robot state RFID reader MBOT (2)
35.
Autonomous Systems 2024©
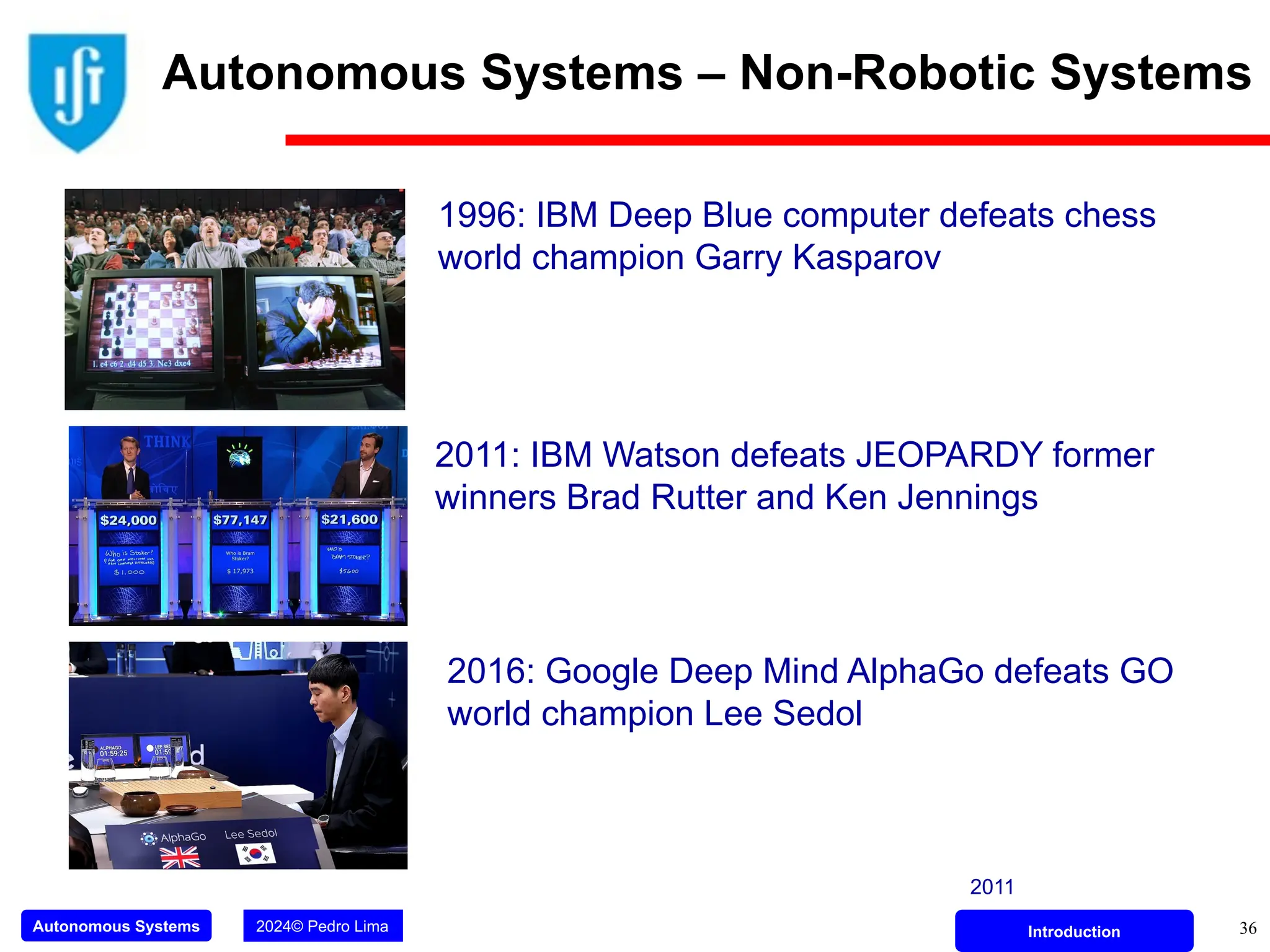
Pedro Lima Introduction Autonomous Systems – Non-Robotic Systems 36 1996: IBM Deep Blue computer defeats chess world champion Garry Kasparov 2011 2011: IBM Watson defeats JEOPARDY former winners Brad Rutter and Ken Jennings 2016: Google Deep Mind AlphaGo defeats GO world champion Lee Sedol
36.
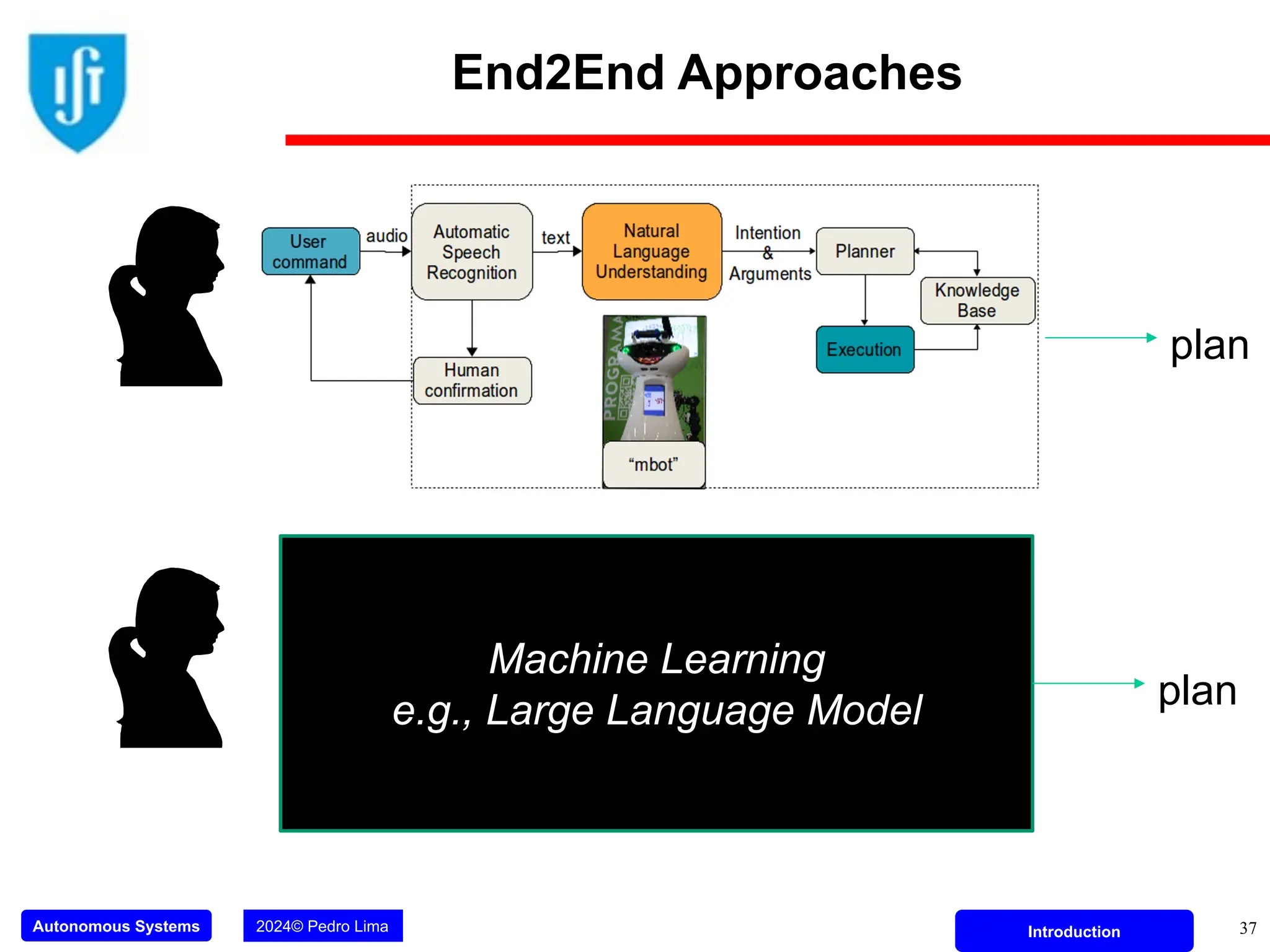
Autonomous Systems 2024©
Pedro Lima Introduction End2End Approaches 37 Machine Learning e.g., Large Language Model plan plan
37.
Autonomous Systems 2024©
Pedro Lima Introduction 38 Autonomous Networked Robot Systems ISR/IST SocRob@Home
38.
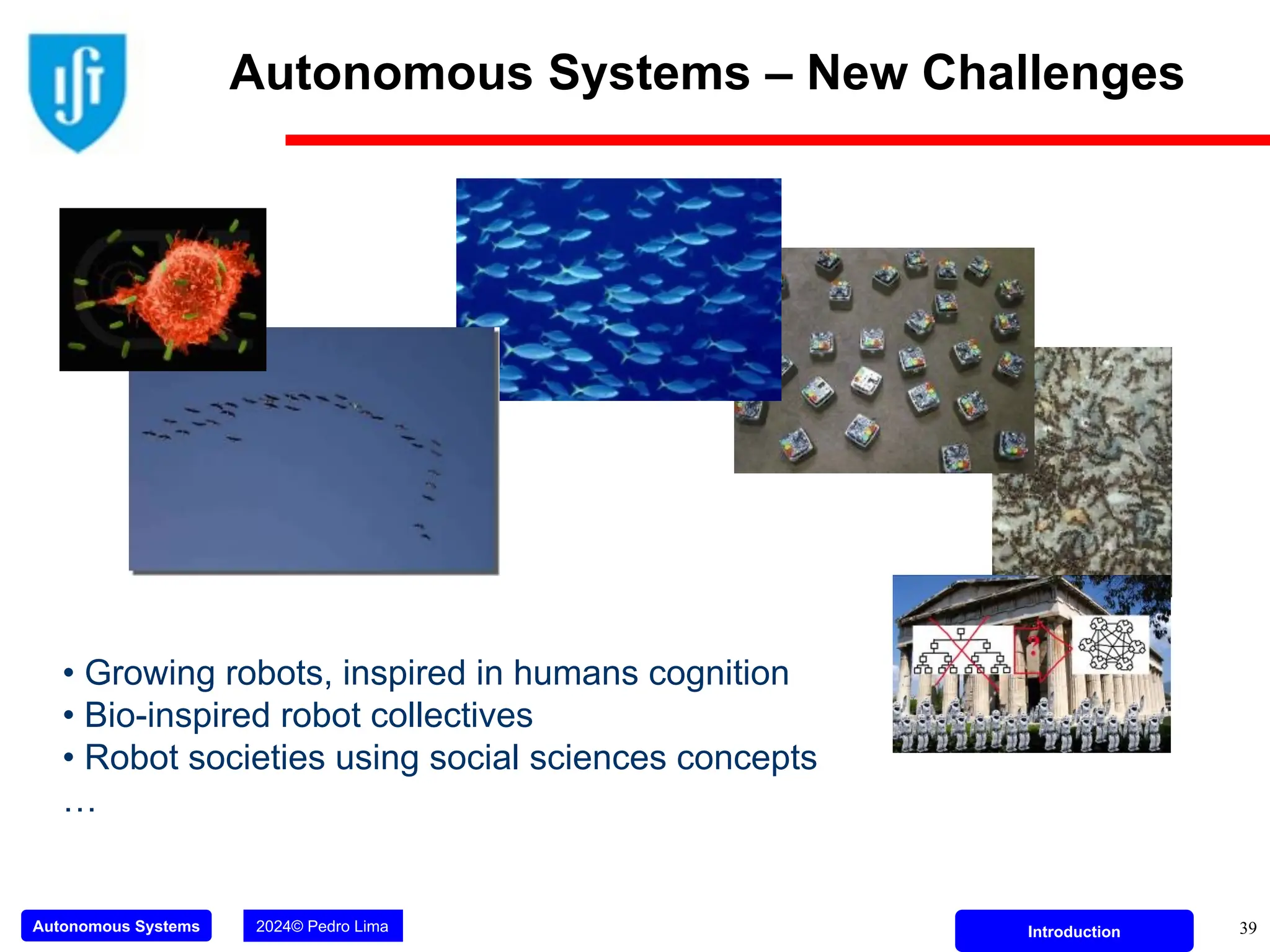
Autonomous Systems 2024©
Pedro Lima Introduction 39 • Growing robots, inspired in humans cognition • Bio-inspired robot collectives • Robot societies using social sciences concepts … Autonomous Systems – New Challenges
39.
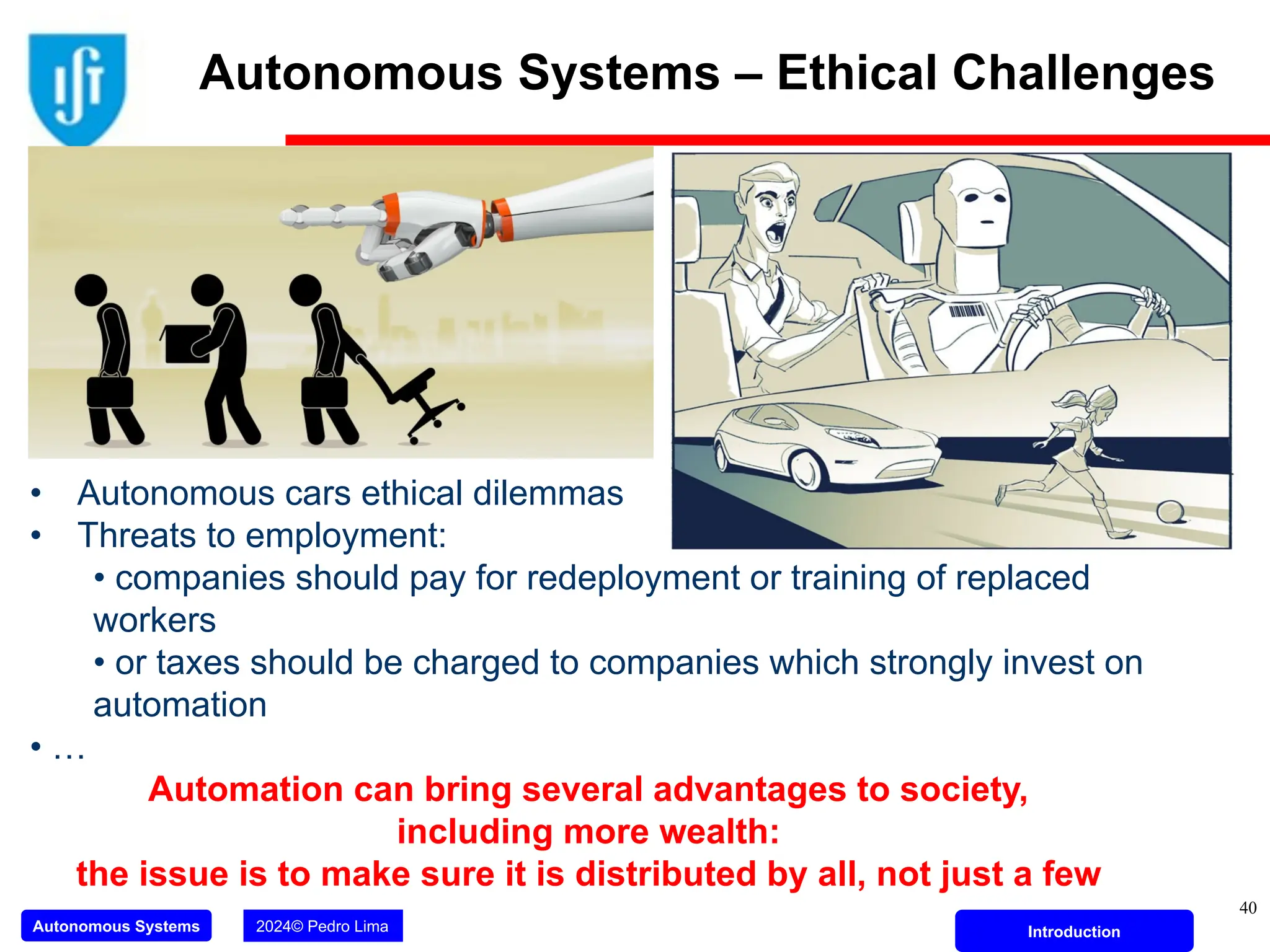
Autonomous Systems 2024©
Pedro Lima Introduction 40 • Autonomous cars ethical dilemmas • Threats to employment: • companies should pay for redeployment or training of replaced workers • or taxes should be charged to companies which strongly invest on automation • … Automation can bring several advantages to society, including more wealth: the issue is to make sure it is distributed by all, not just a few Autonomous Systems – Ethical Challenges
40.
Autonomous Systems 2024©
Pedro Lima Introduction Components of an Autonomous System An autonomous system (AS) is a combination of various physical (hardware) and computational (software) subsystems: – Acting and Moving – how does an AS actuate over its environment – Sensing – how does an AS measure properties of itself (e.g., its location) and of its environment – Reasoning and Planning – how does na AS map the measurements into actions, possibly planning short- and long-term actions and motions – Communication – how does a robot communicate with an outside operator and with other robots; how does it interact naturally with humans? Classical cycle: SENSING – PROCESSING - ACTING 41
Download