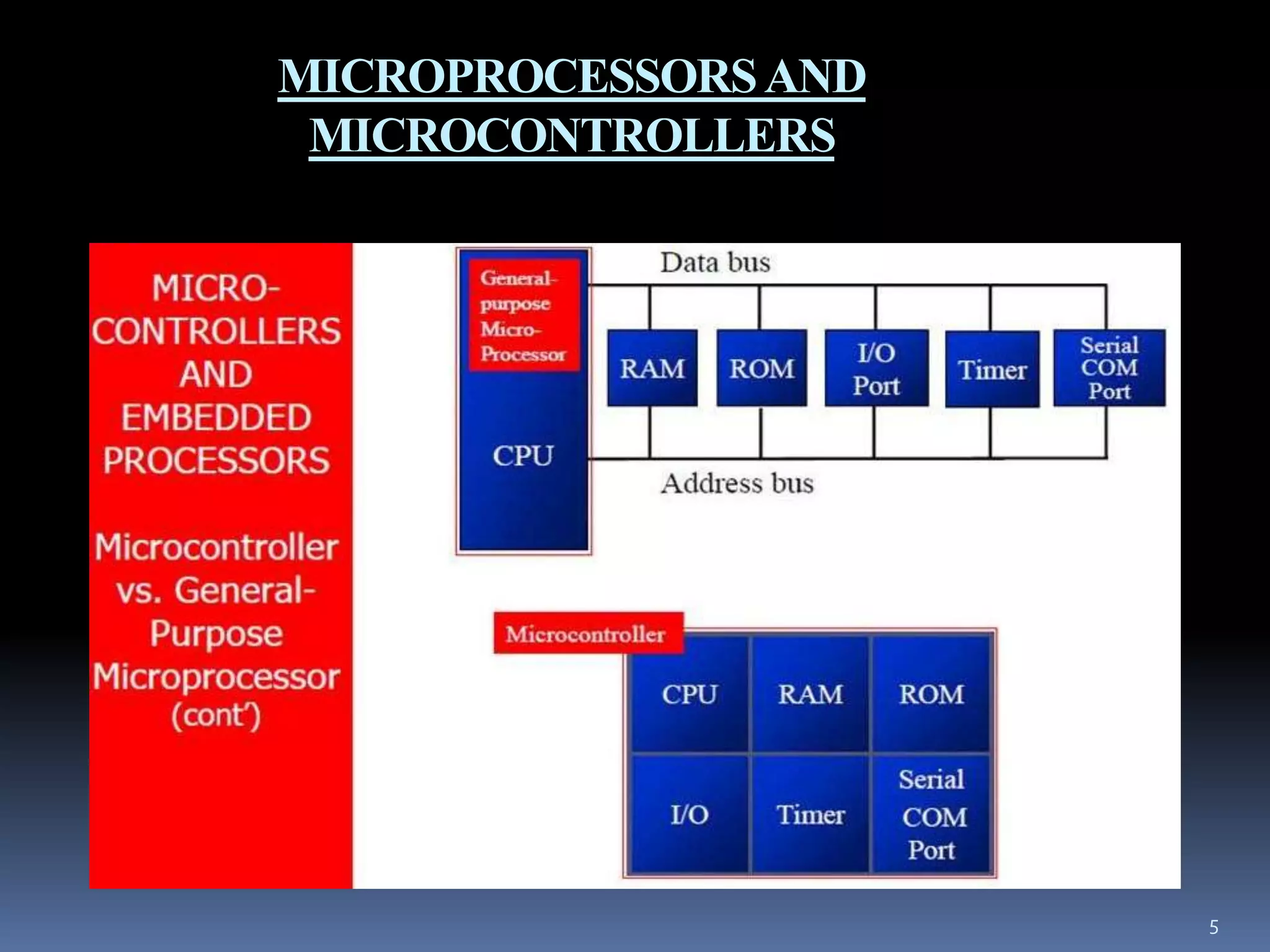
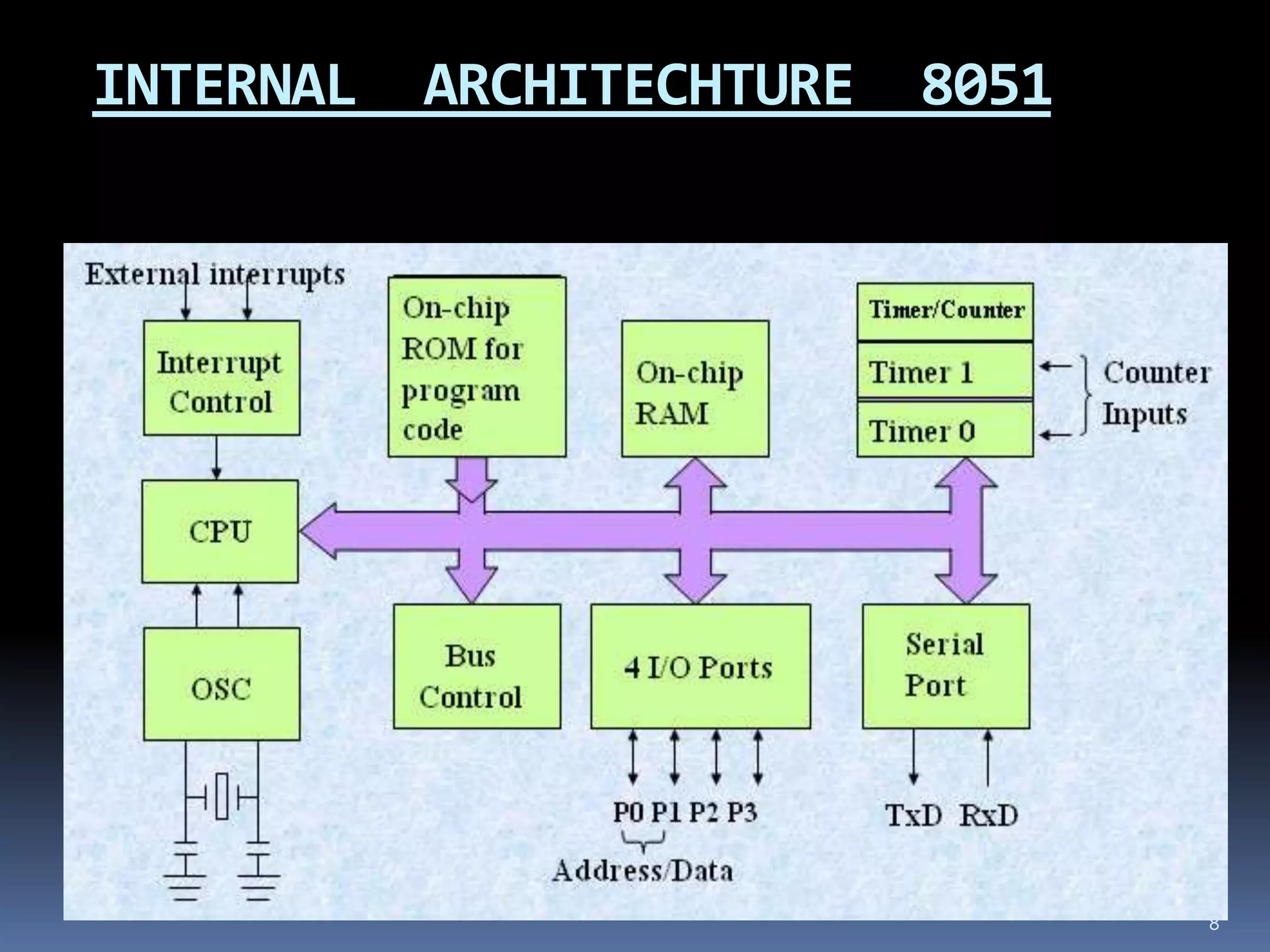
An embedded system is a specialized computer system that is part of a larger mechanical or electrical system. It performs predefined tasks, unlike a general purpose computer. The document discusses embedded systems and provides examples like refrigerators and mobile phones. It also describes microprocessors, microcontrollers, and the 8051 microcontroller architecture in detail. Applications of embedded systems mentioned include signal processing, distributed control, and small systems.


















































































![ANPARA THERMAL POWER STATION[1] sangam.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/anparathermalpowerstation1sangam-251121115219-9261cde4-thumbnail.jpg?width=640&height=640&fit=bounds)













