Downloaded 149 times


![Interaction Model [Synchronous vs
Asynchronous]](https://image.slidesharecdn.com/2-190924094753/75/Distributed-Systems-Introduction-and-Importance-79-2048.jpg)

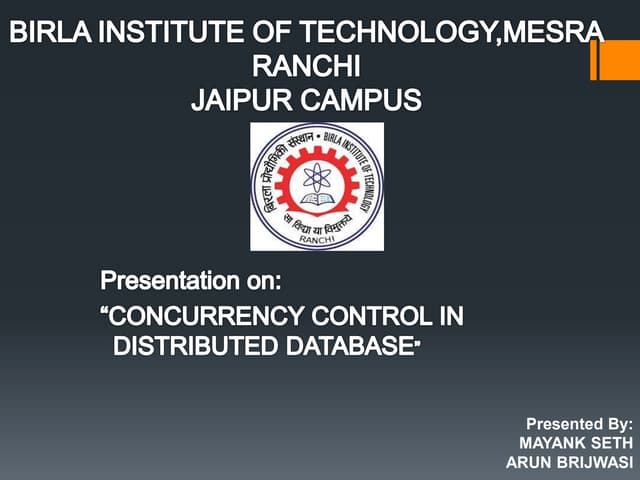
![BSS Algorithm ...
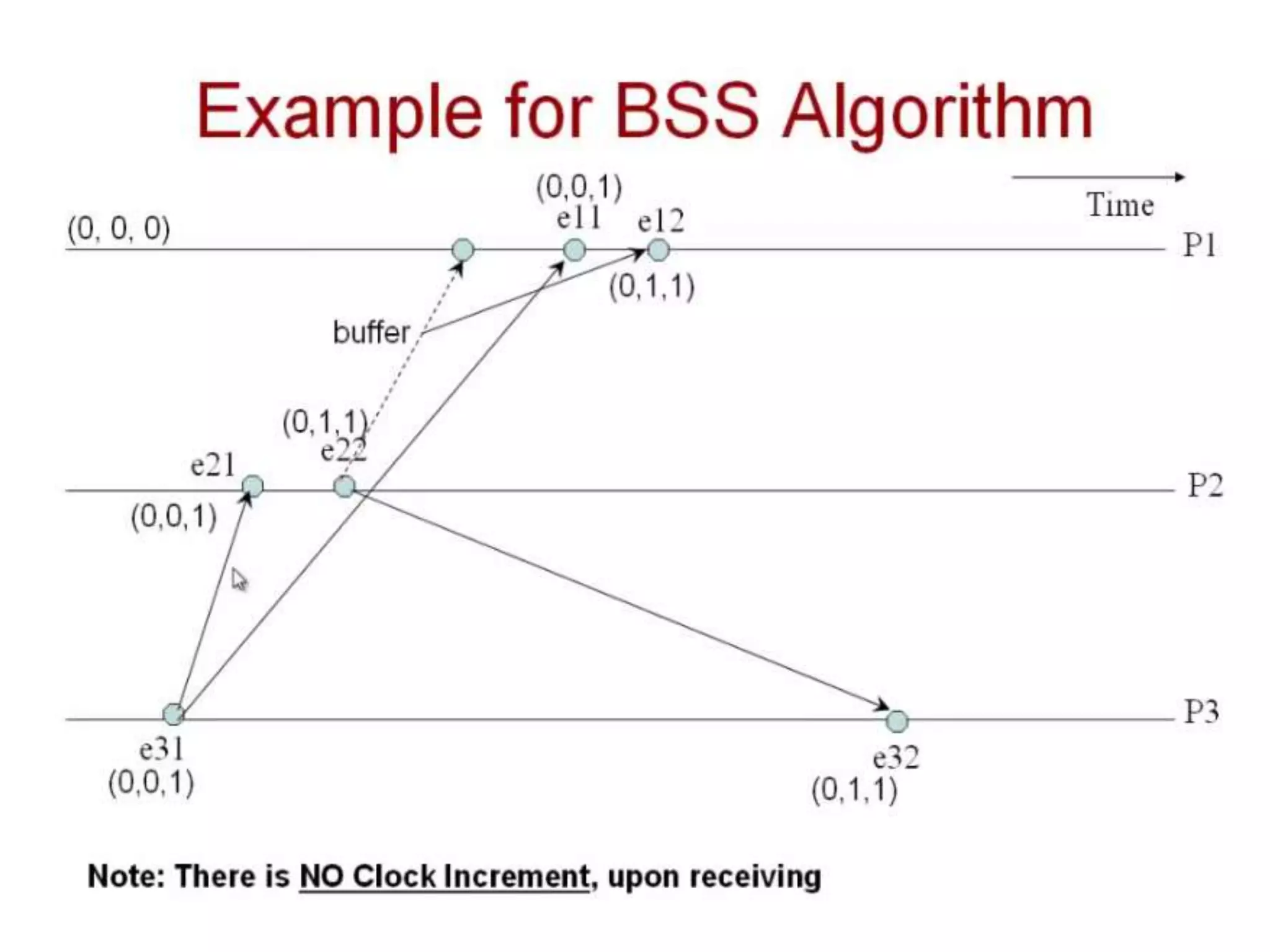
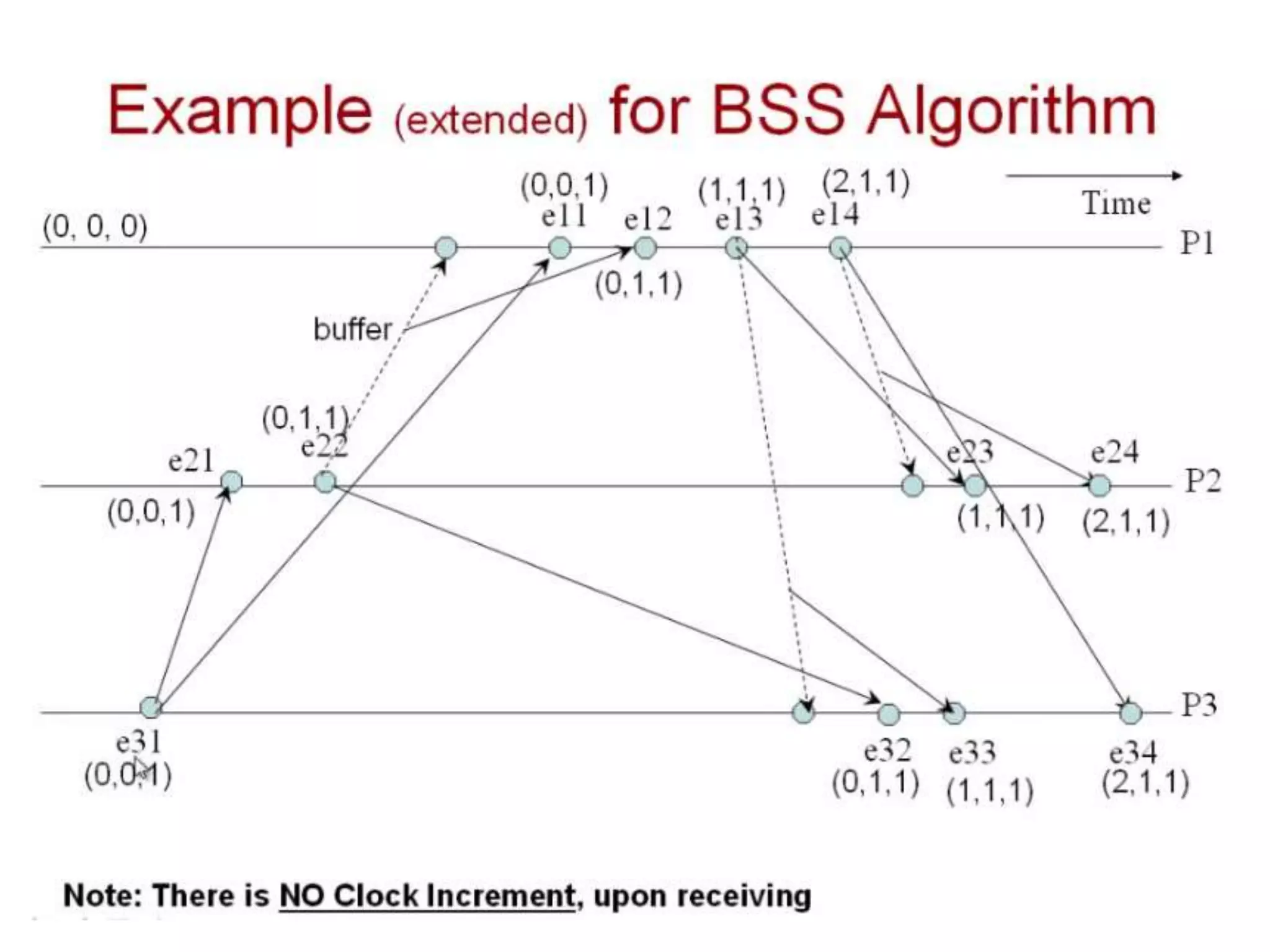
1. Process Pi increments the vector time VTpi[i], time stamps,
and broadcasts the message m. VTpi[i] - 1 denotes the number
of messages preceding m.
2. Pj != Pi receives m. m is delivered when:
a. VTpj[i] == VTm[i] – 1 [Pj has received all messages from Pi before m]
b. VTpj[k] >= VTm[k] for all k in {1,2,..n} - {i}, n is the
total number of processes. Delayed message are queued
in a sorted manner. [Pj has received all those messages received by Pi before m]
c. Concurrent messages are ordered by time of receipt.
3. When m is delivered at Pj, VTpj updated according Rule 2 of
vector clocks.
2(a) : Pj has received all Pi’s messages preceding m.
2(b): Pj has received all other messages received by Pi
before sending m.](https://image.slidesharecdn.com/2-190924094753/75/Distributed-Systems-Introduction-and-Importance-154-2048.jpg)
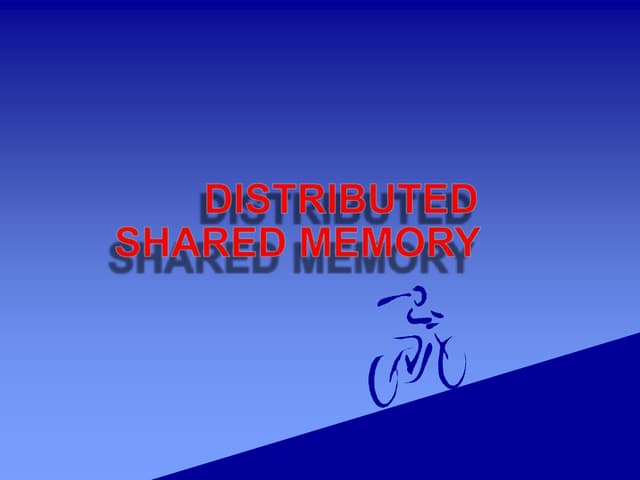
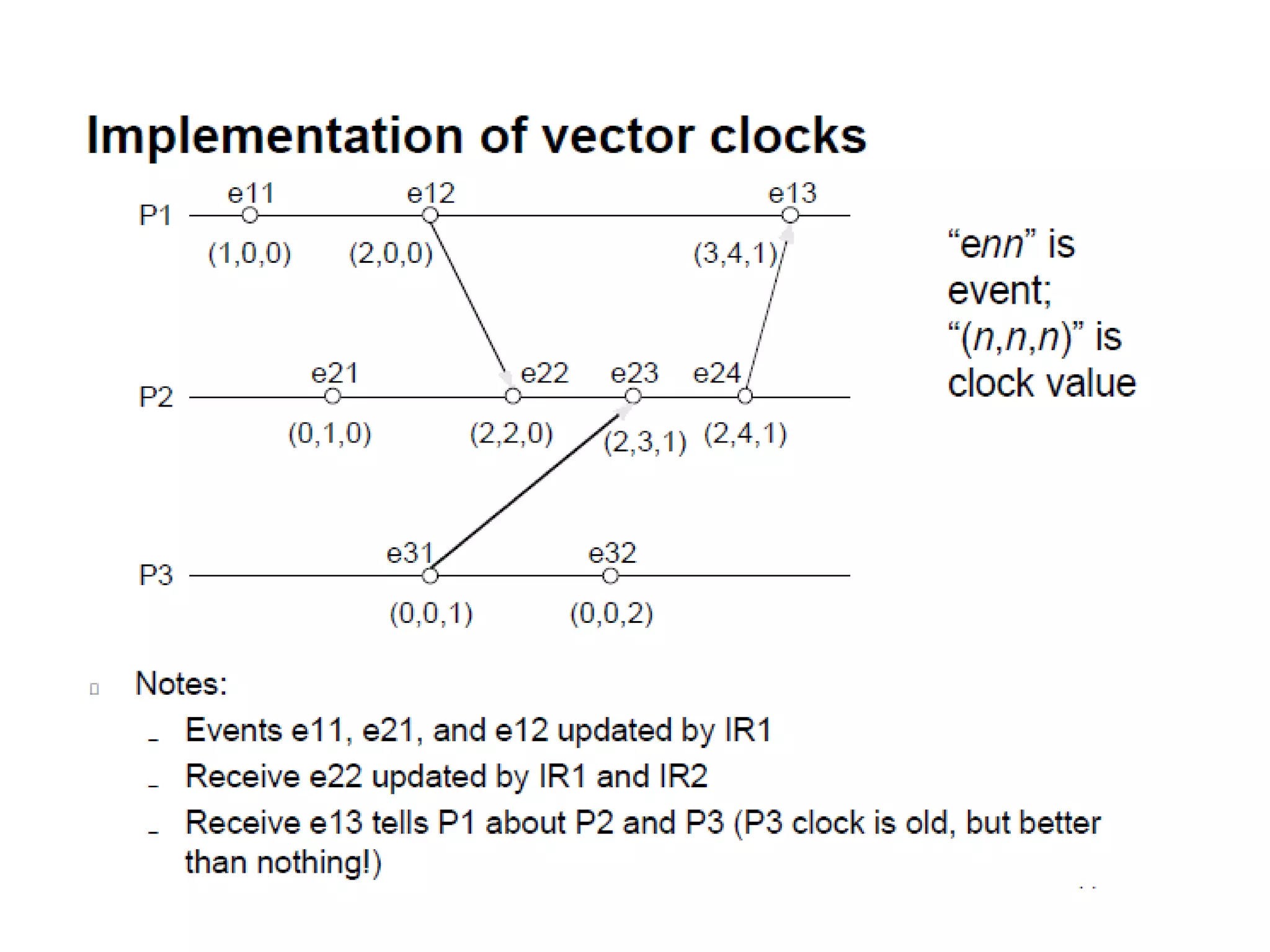
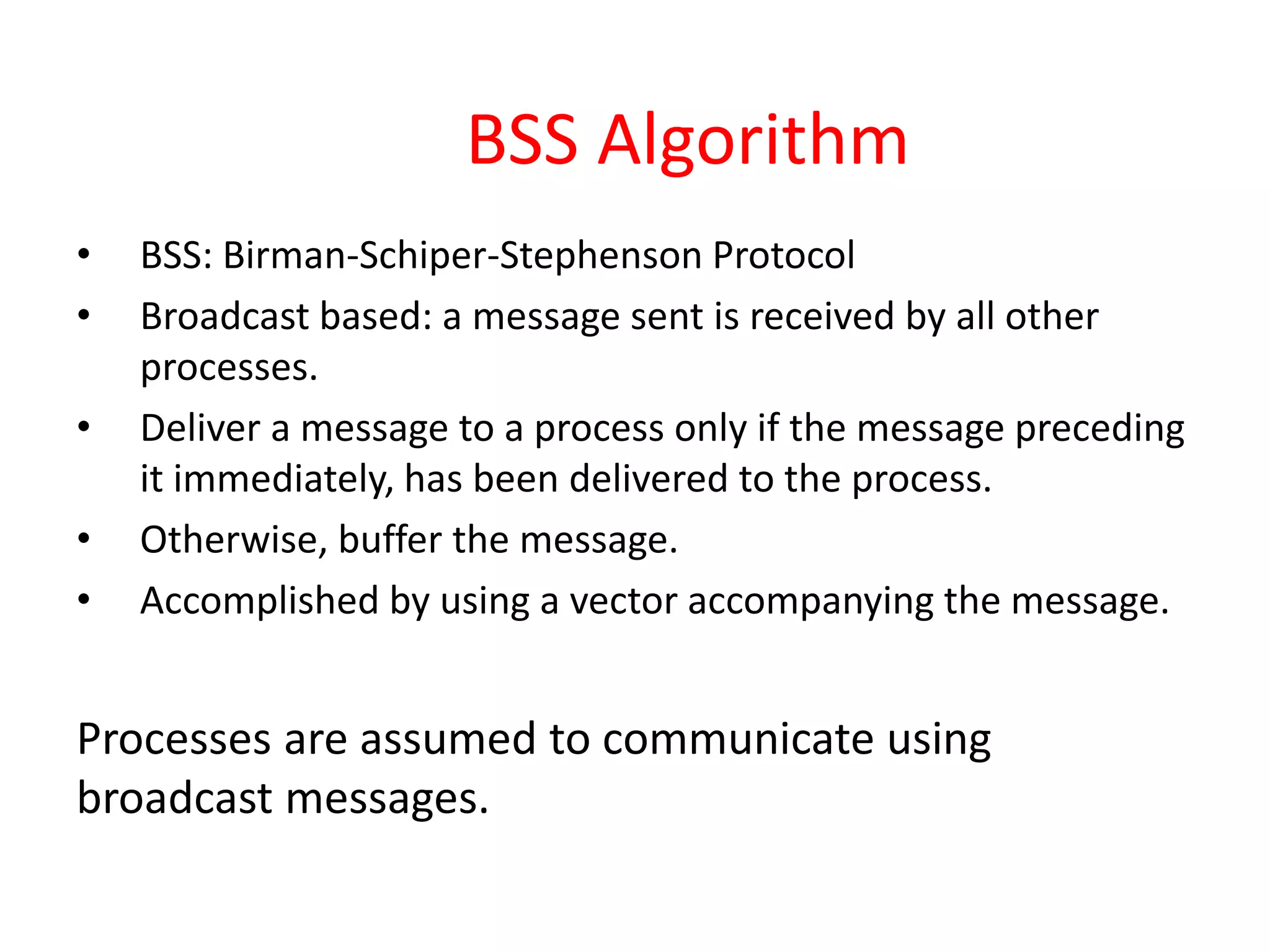
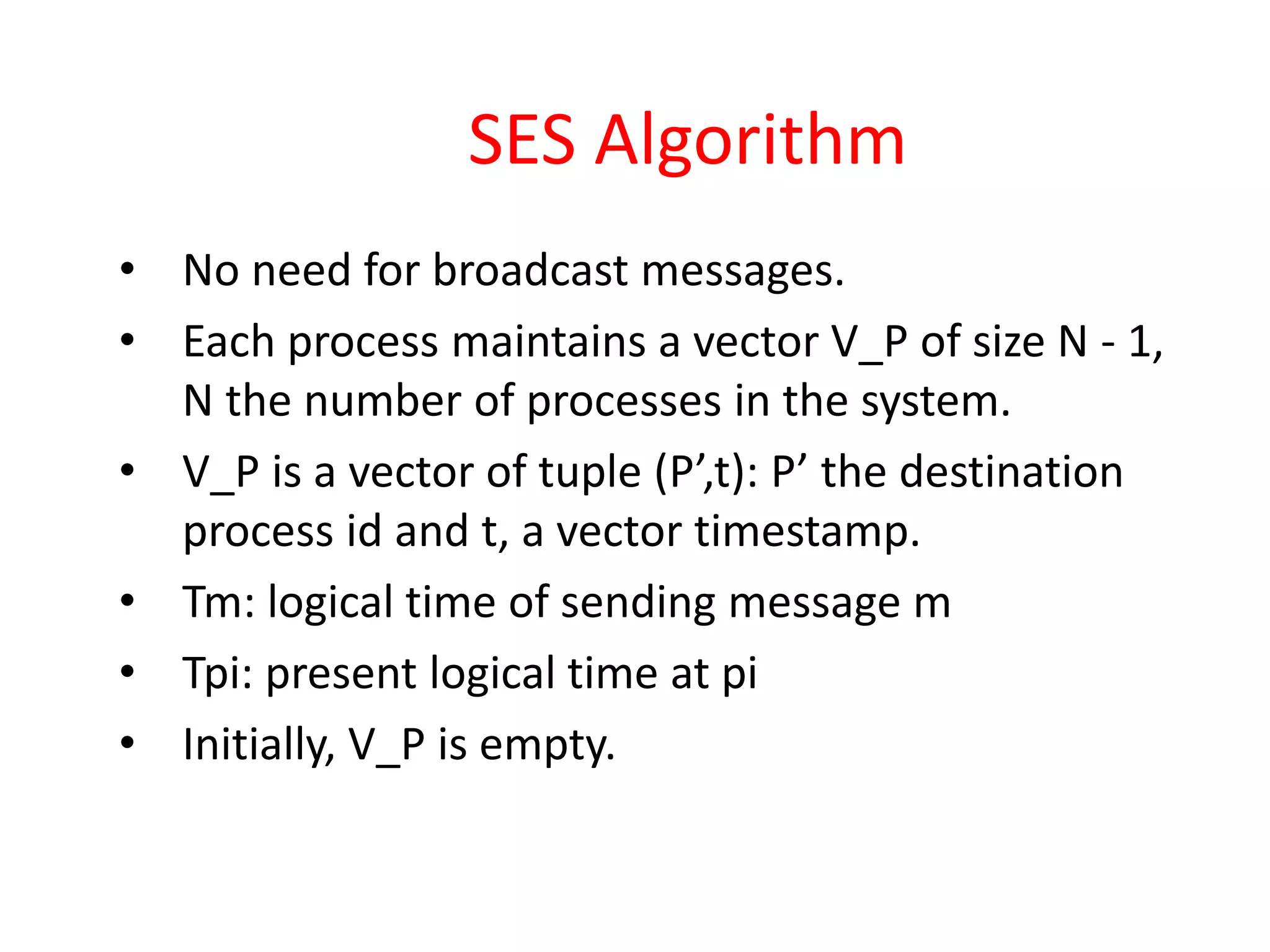
![• All messages are time stamped by the sending process.
[Note: This time is separate from the global time talked about in
the previous sections. Instead each element of the vector
corresponds to the number of messages sent (including this one)
to other processes.]
• A message can not be delivered until:
– All the messages before this one have been delivered locally.
– All the other messages that have been sent out from the
original processs has been accounted as delivered at the
receiving process.
• When a message is delivered, the clock is updated.
• This protocol requires that the processes communicate through
broadcast messages since this would ensure that only one
message could be received at any one time (thus concurrently
time stamped messages can be ordered).](https://image.slidesharecdn.com/2-190924094753/75/Distributed-Systems-Introduction-and-Importance-155-2048.jpg)














































































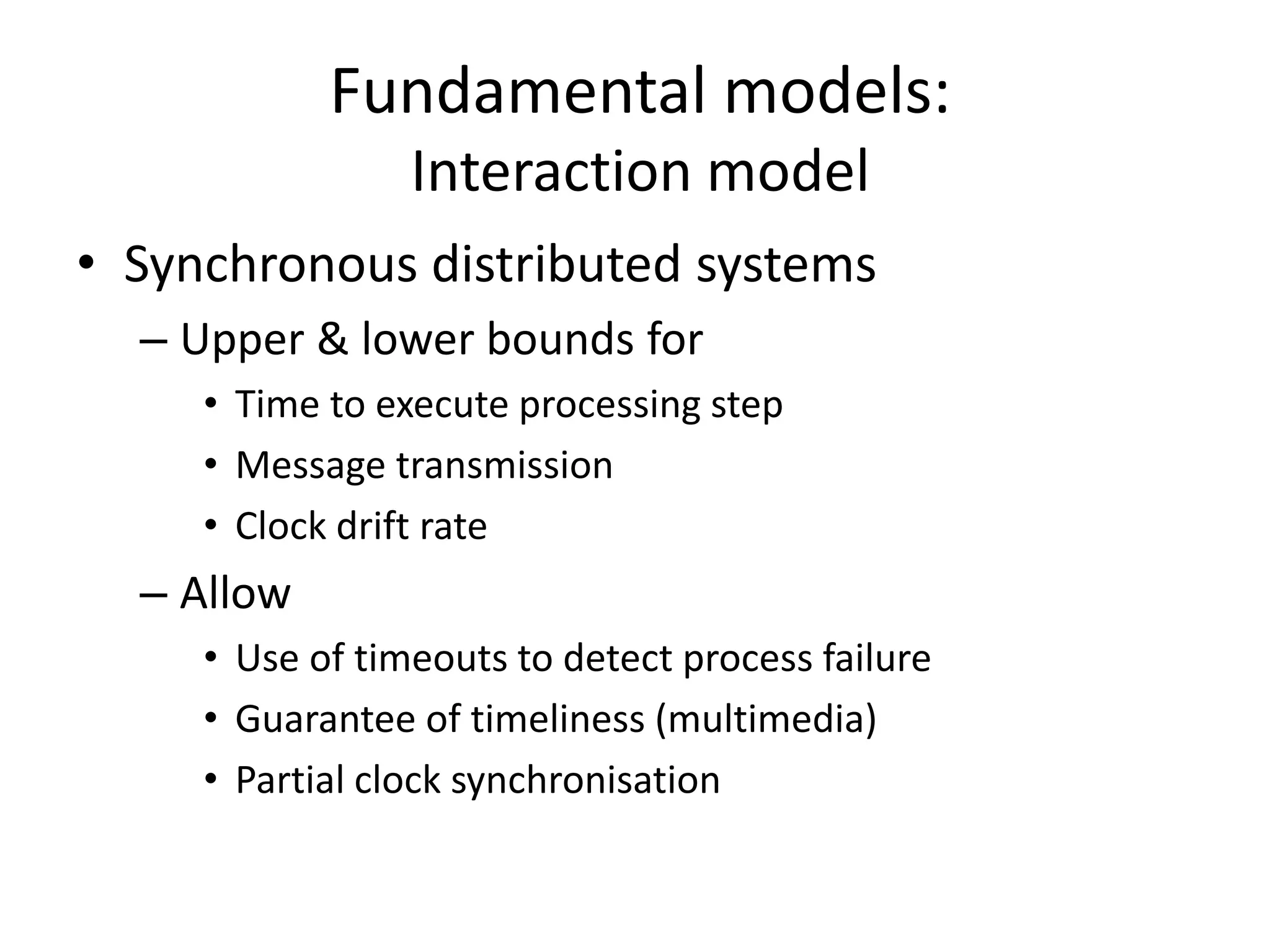
![Interaction Model [Synchronous vs
Asynchronous]](https://crownmelresort.com/image.slidesharecdn.com/2-190924094753/75/Distributed-Systems-Introduction-and-Importance-79-2048.jpg)










































































![BSS Algorithm ...
1. Process Pi increments the vector time VTpi[i], time stamps,
and broadcasts the message m. VTpi[i] - 1 denotes the number
of messages preceding m.
2. Pj != Pi receives m. m is delivered when:
a. VTpj[i] == VTm[i] – 1 [Pj has received all messages from Pi before m]
b. VTpj[k] >= VTm[k] for all k in {1,2,..n} - {i}, n is the
total number of processes. Delayed message are queued
in a sorted manner. [Pj has received all those messages received by Pi before m]
c. Concurrent messages are ordered by time of receipt.
3. When m is delivered at Pj, VTpj updated according Rule 2 of
vector clocks.
2(a) : Pj has received all Pi’s messages preceding m.
2(b): Pj has received all other messages received by Pi
before sending m.](https://crownmelresort.com/image.slidesharecdn.com/2-190924094753/75/Distributed-Systems-Introduction-and-Importance-154-2048.jpg)
![• All messages are time stamped by the sending process.
[Note: This time is separate from the global time talked about in
the previous sections. Instead each element of the vector
corresponds to the number of messages sent (including this one)
to other processes.]
• A message can not be delivered until:
– All the messages before this one have been delivered locally.
– All the other messages that have been sent out from the
original processs has been accounted as delivered at the
receiving process.
• When a message is delivered, the clock is updated.
• This protocol requires that the processes communicate through
broadcast messages since this would ensure that only one
message could be received at any one time (thus concurrently
time stamped messages can be ordered).](https://crownmelresort.com/image.slidesharecdn.com/2-190924094753/75/Distributed-Systems-Introduction-and-Importance-155-2048.jpg)




















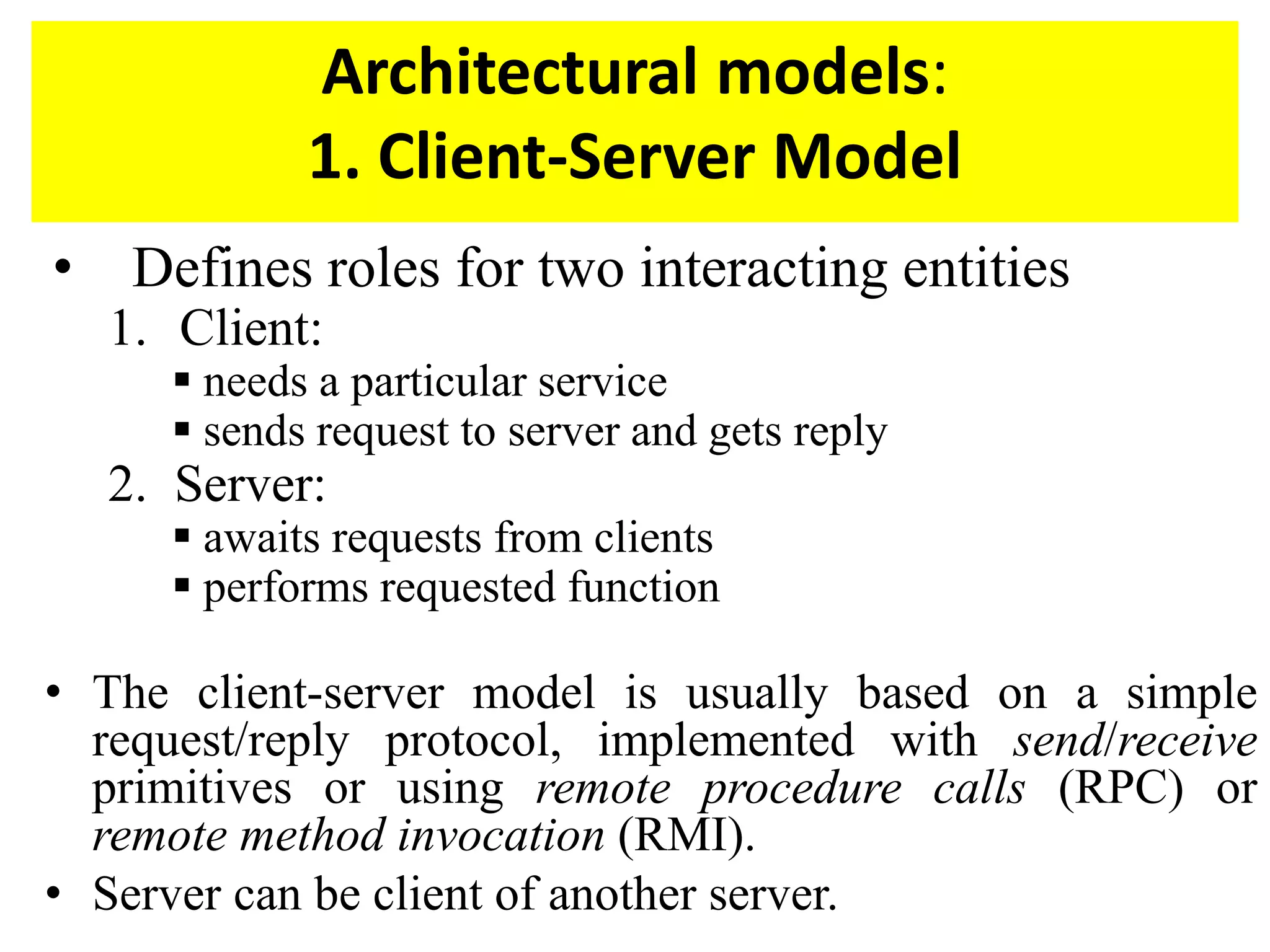
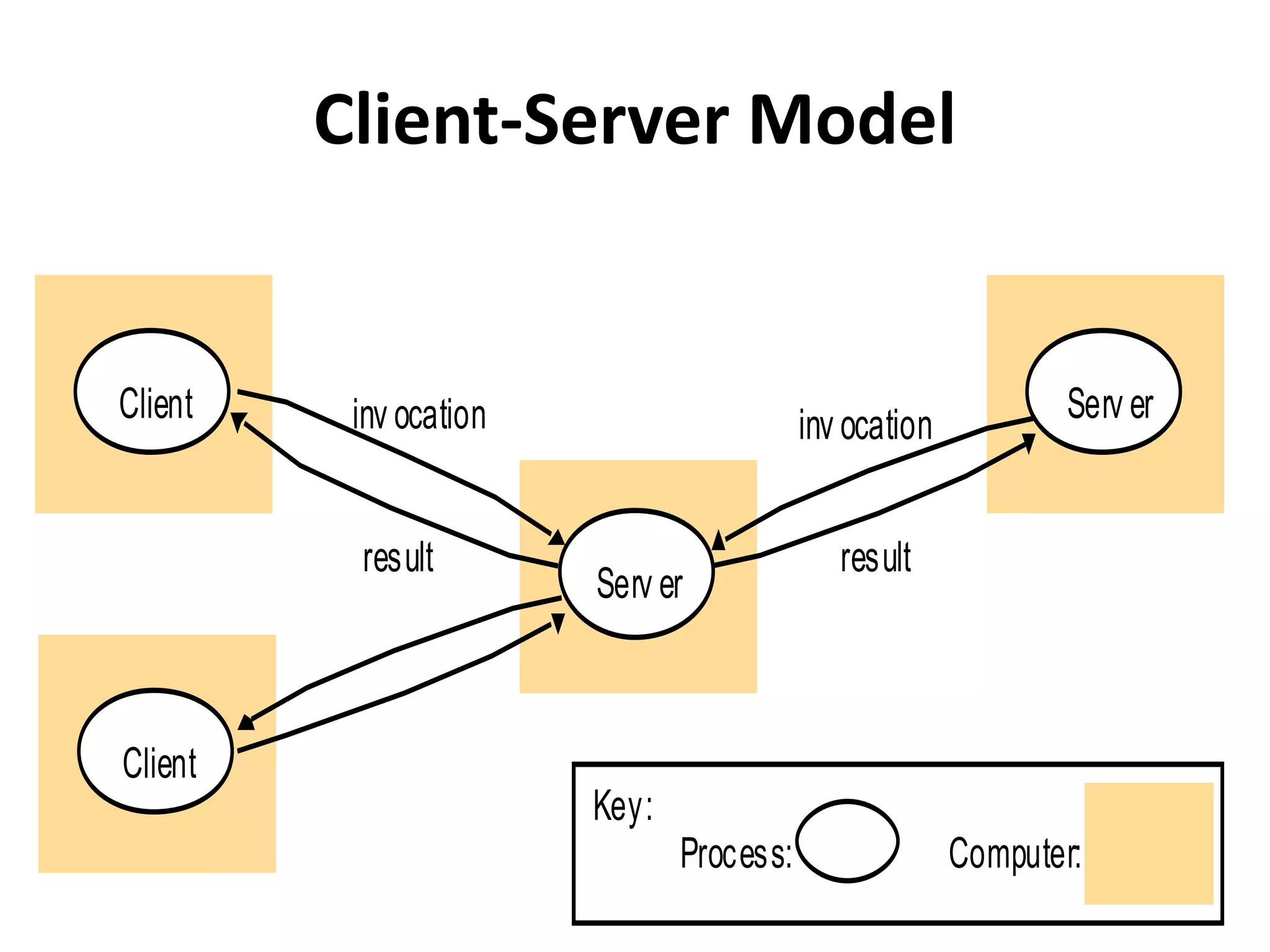
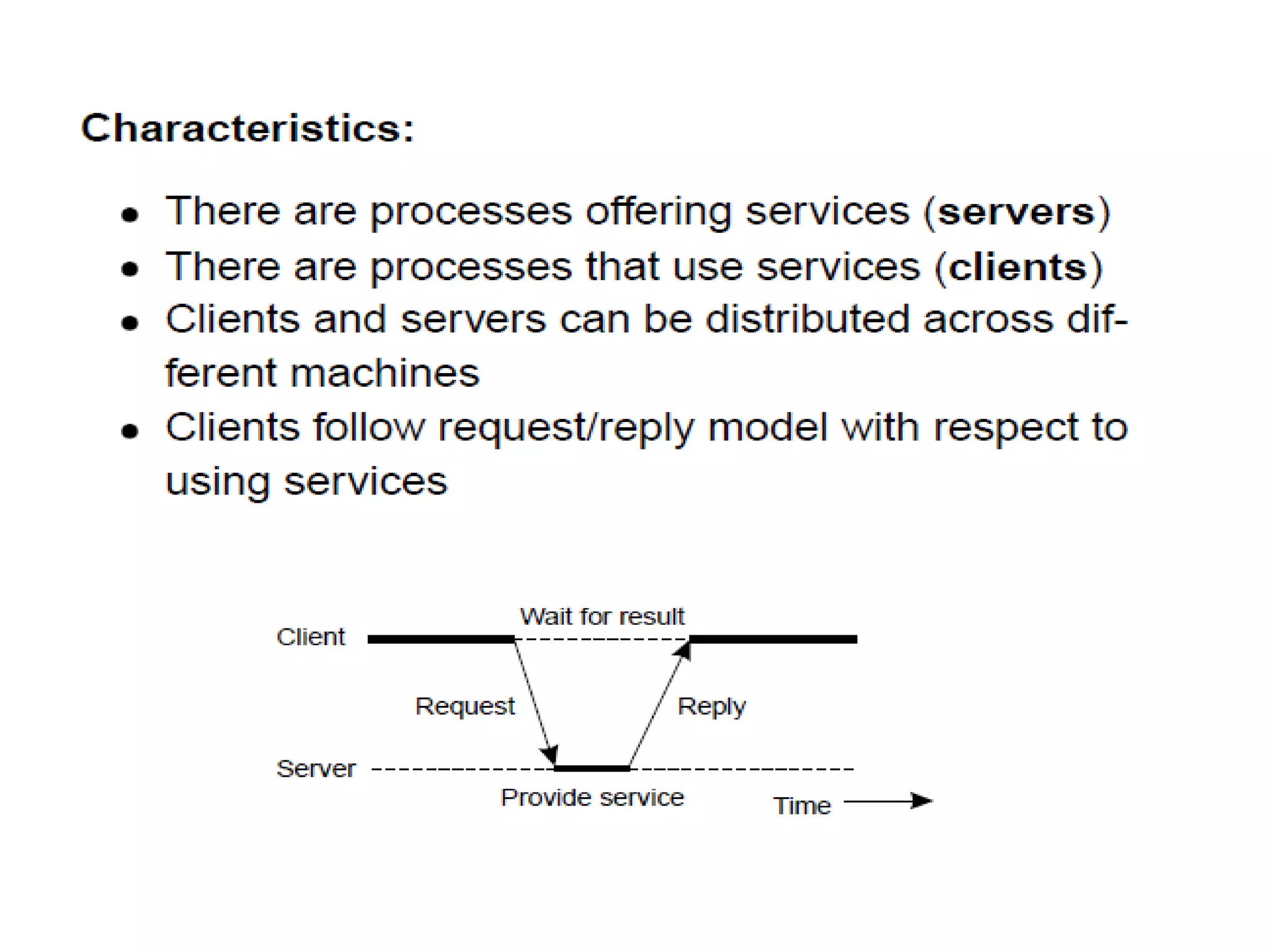
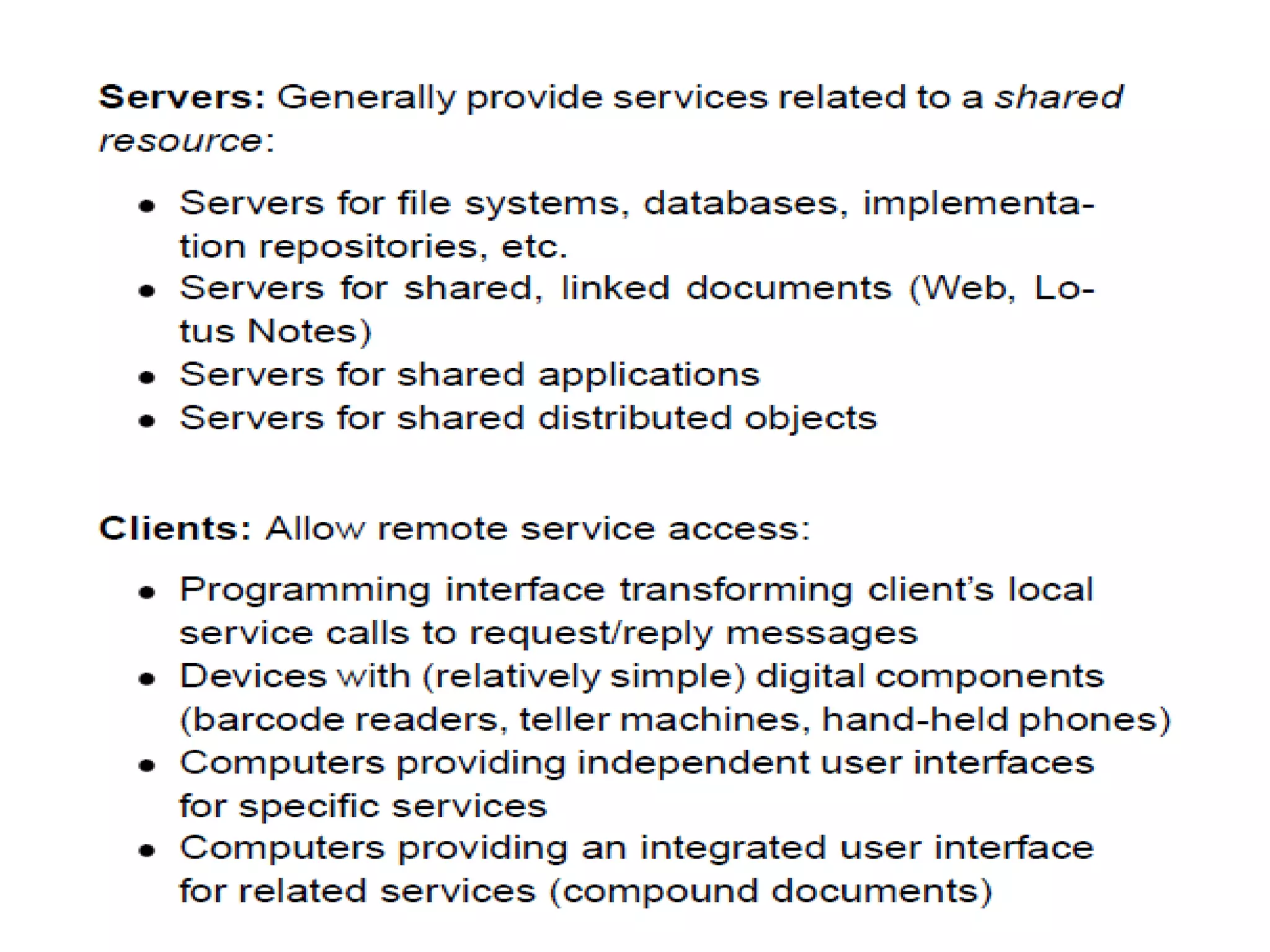
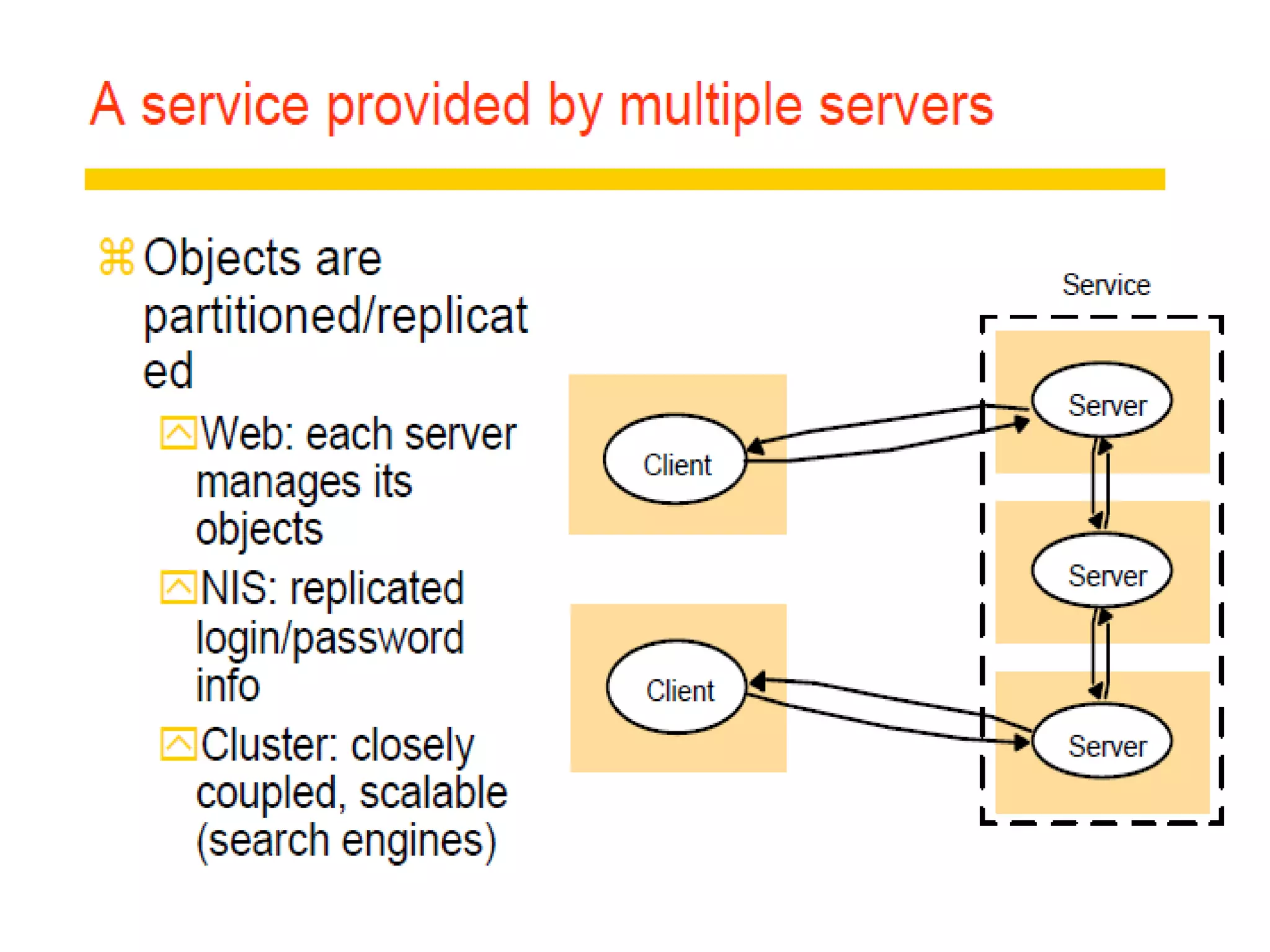
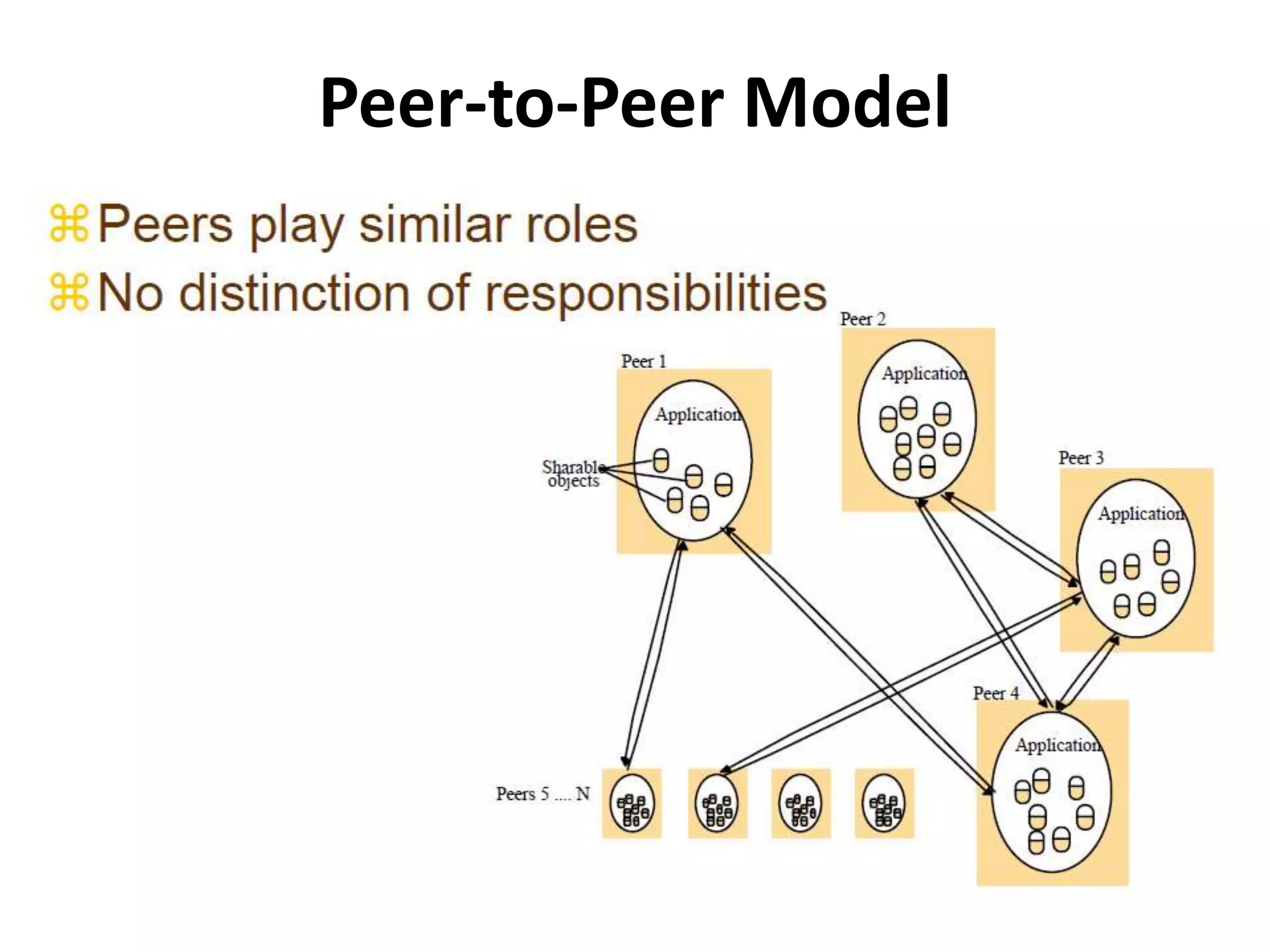
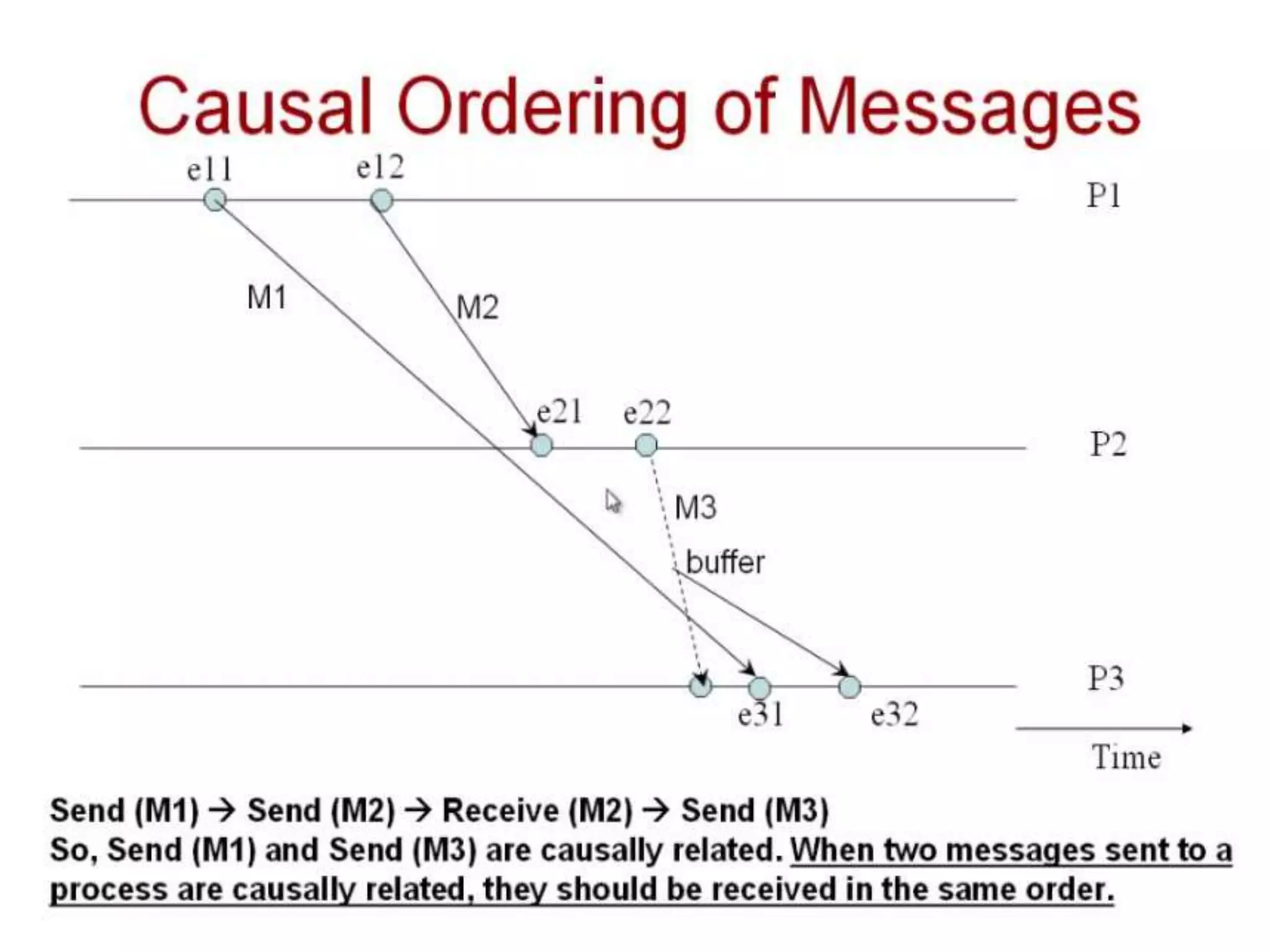
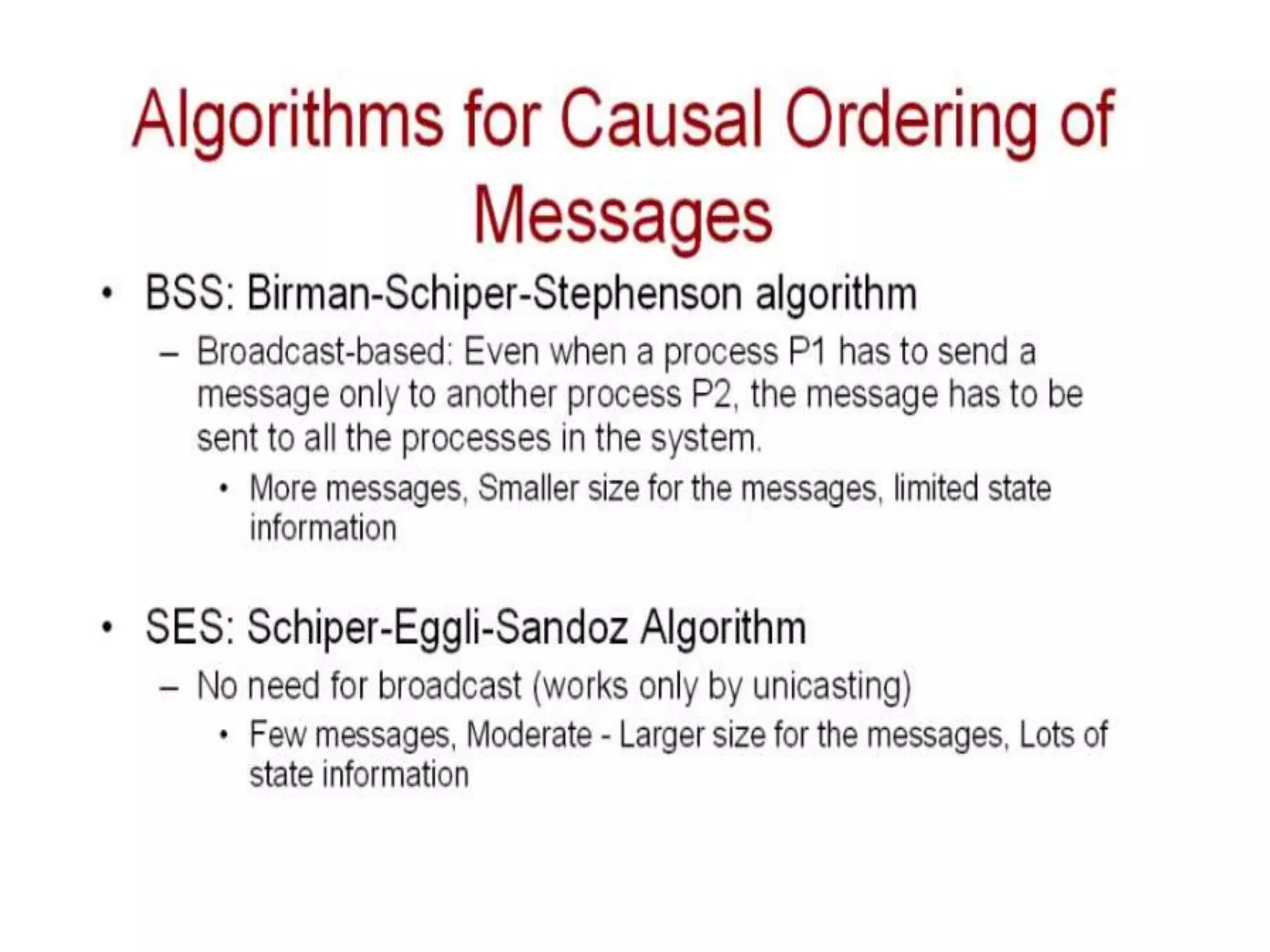
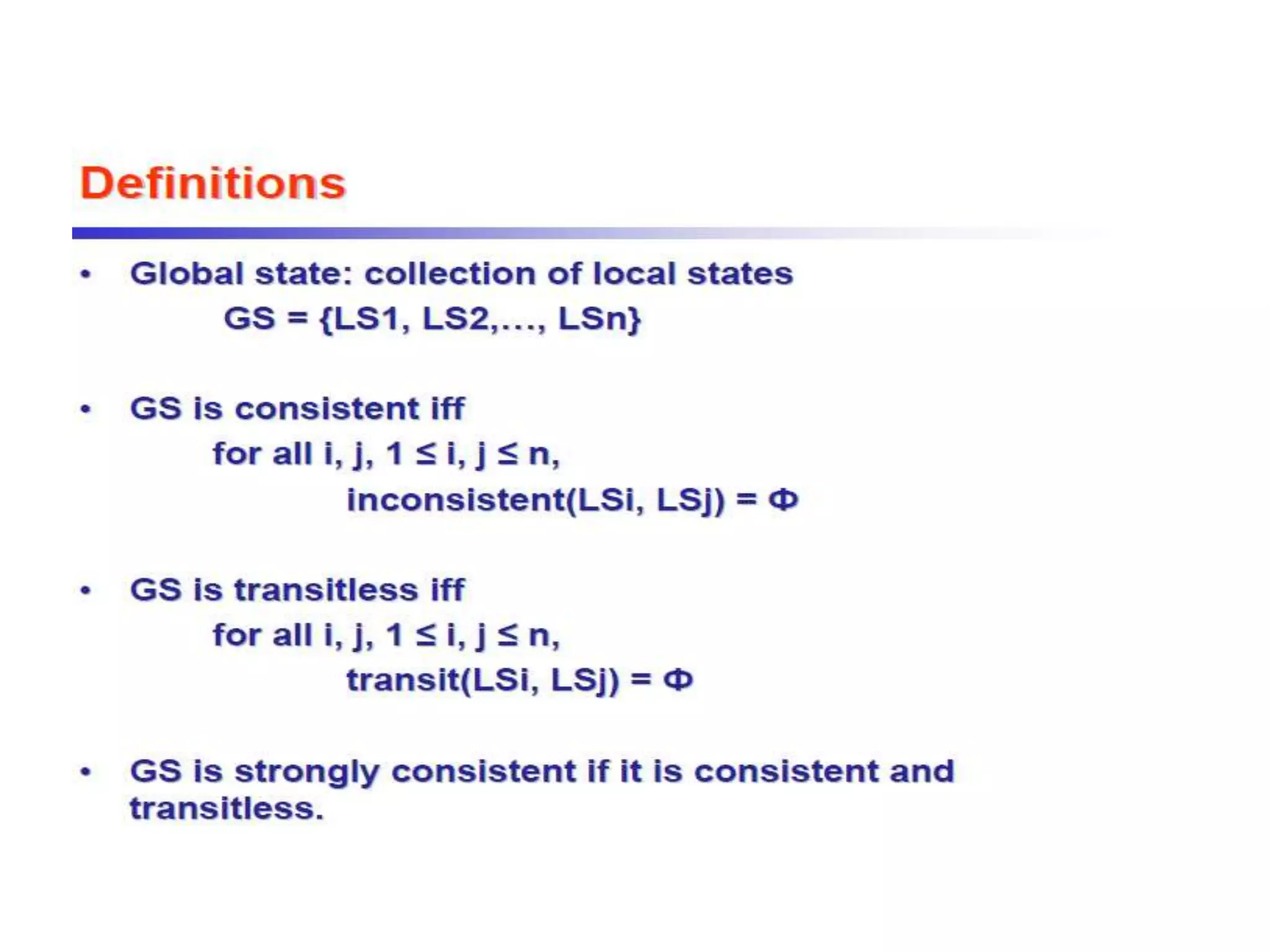
The document provides a comprehensive overview of distributed systems, covering their characterization, structural models (client-server and peer-to-peer), theoretical foundations including limitations and logical clocks, and challenges such as security and transparency. It discusses various factors affecting system reliability, performance, and interaction models while highlighting essential architectural considerations. Key concepts include message passing, handling of concurrency, and strategies for ensuring robustness in real-world applications, including fault tolerance and security mechanisms.