Downloaded 47 times
![Simulated Annealing
- Just like hill climbing algorithm
- Allows downhill step to escape local maxima
- Uses a control parameter T, that is high at starting and gradually decreases
towards 0
- A bad move from A to B [ f(A) > f(B) ] is accepted with probability:
P = e ( f(B) - f(A) ) / T
- Higher T, likelihood of making bad move is high
- As T tends to 0, P tends to 0. It means, it acts as hill climbing algorithm](https://image.slidesharecdn.com/ai-ch3-180714035247/75/Searching-Algorithm-15-2048.jpg)














![Simulated Annealing
- Just like hill climbing algorithm
- Allows downhill step to escape local maxima
- Uses a control parameter T, that is high at starting and gradually decreases
towards 0
- A bad move from A to B [ f(A) > f(B) ] is accepted with probability:
P = e ( f(B) - f(A) ) / T
- Higher T, likelihood of making bad move is high
- As T tends to 0, P tends to 0. It means, it acts as hill climbing algorithm](https://crownmelresort.com/image.slidesharecdn.com/ai-ch3-180714035247/75/Searching-Algorithm-15-2048.jpg)











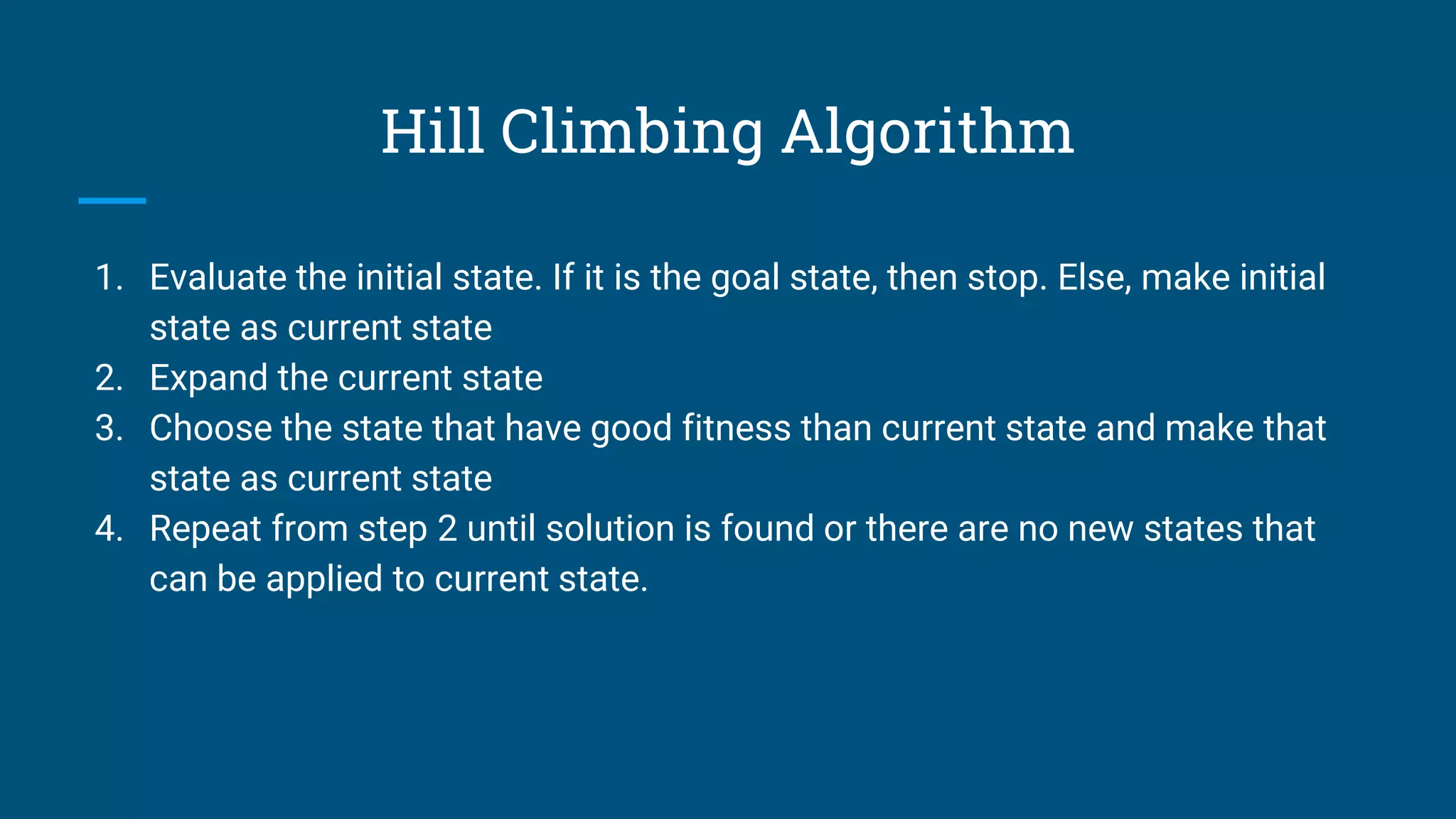
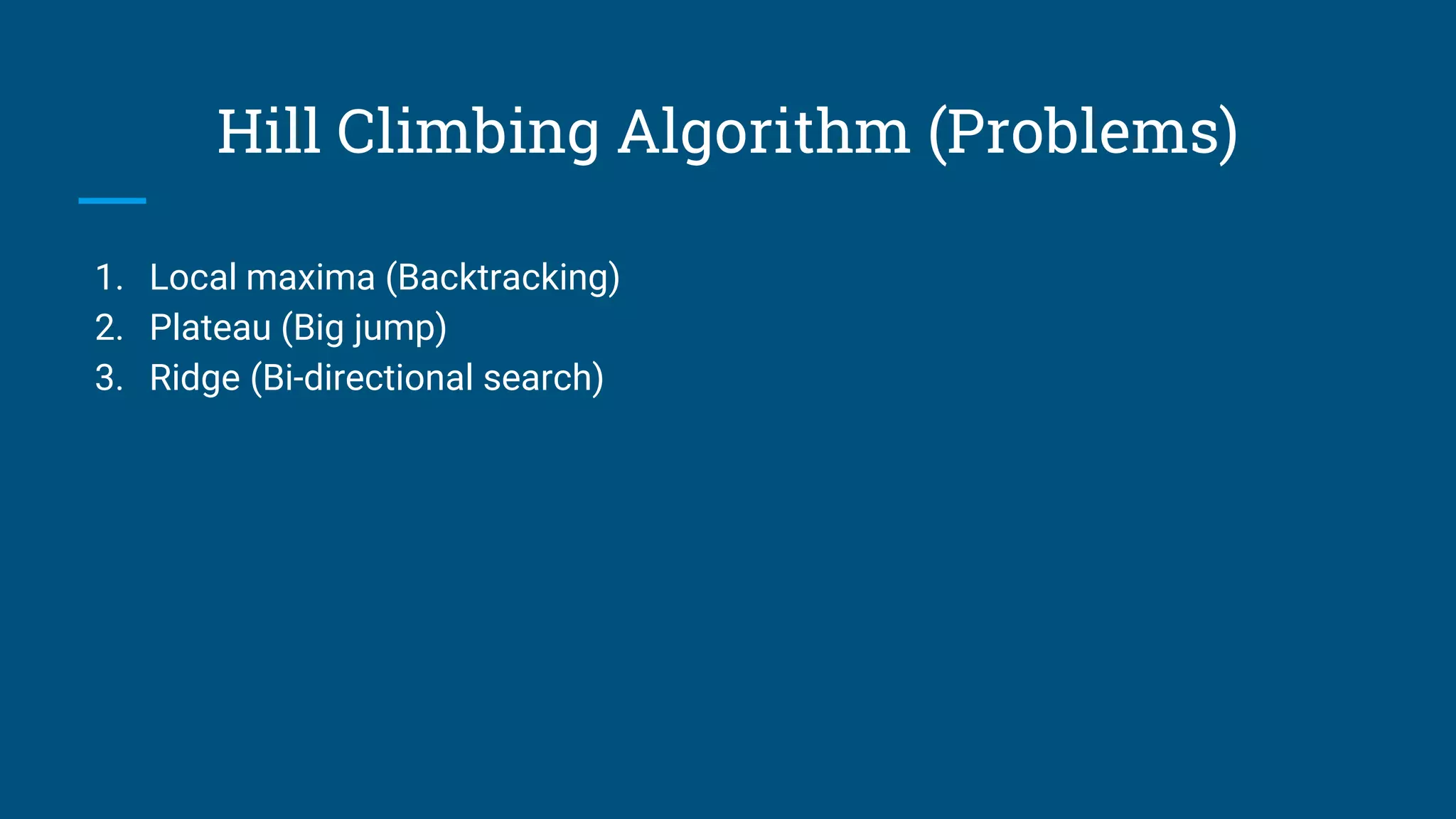
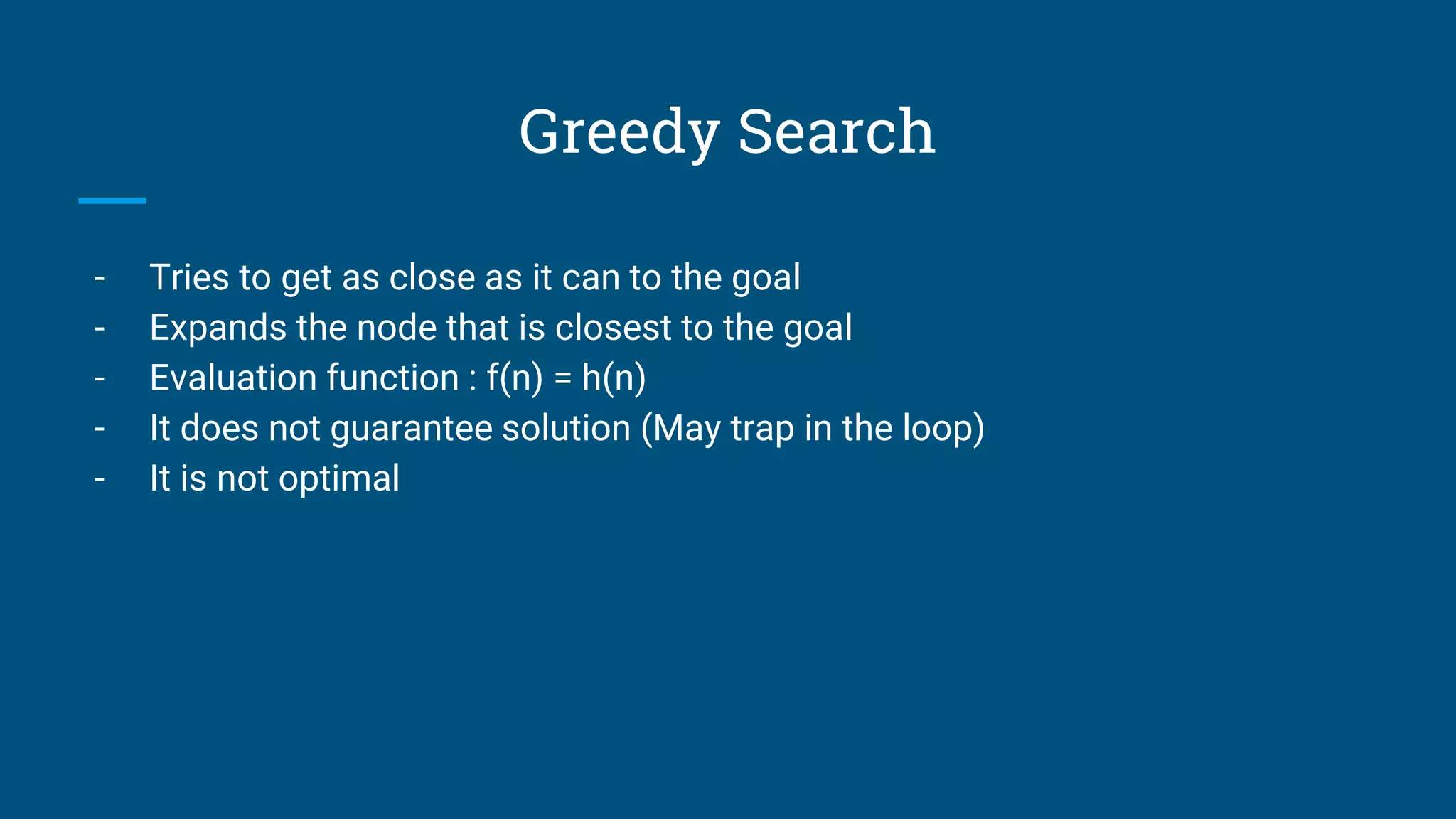
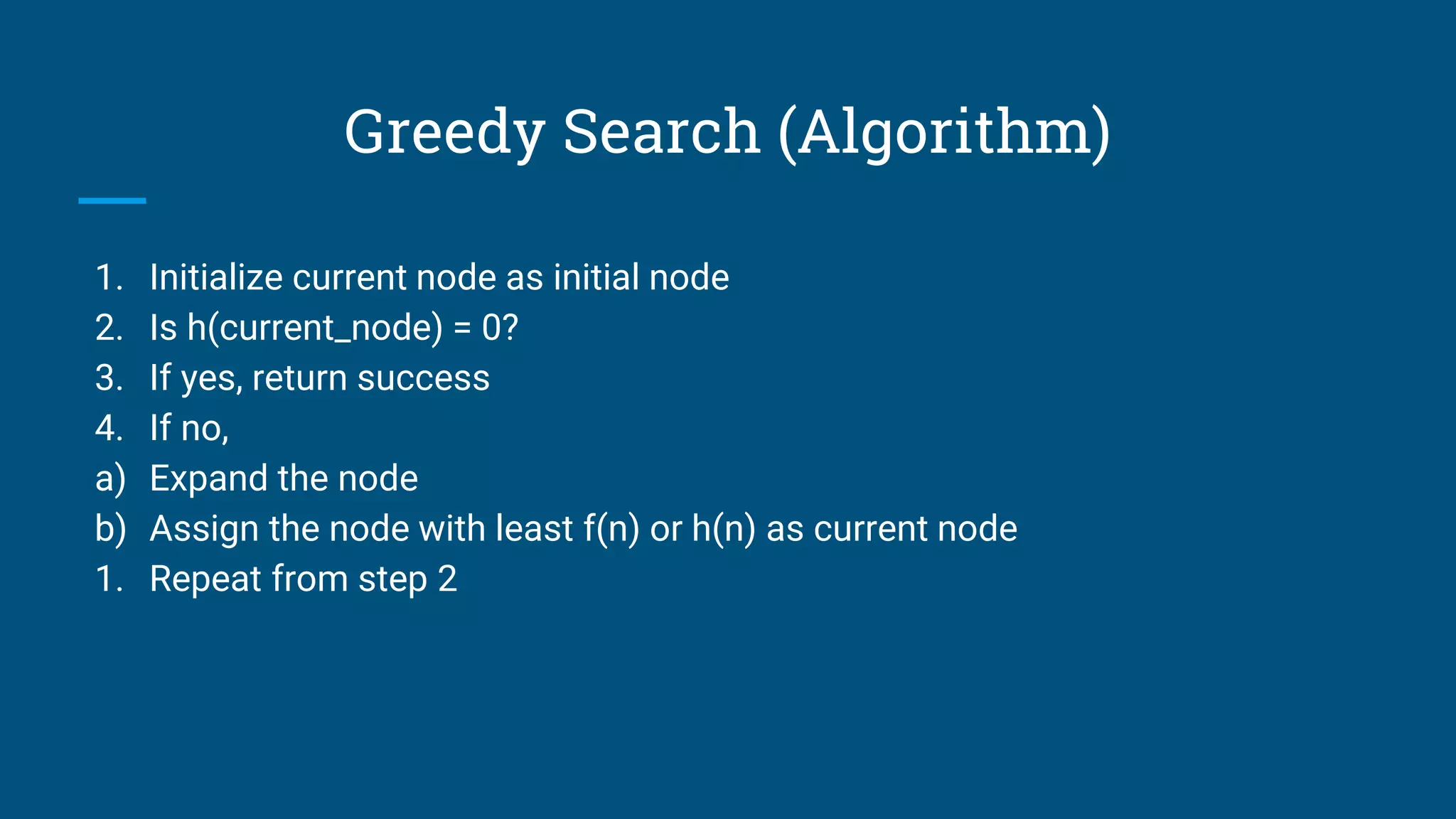
The document details various search techniques in artificial intelligence, distinguishing between uninformed (e.g., BFS, DFS) and informed searches (e.g., A*, greedy search). It discusses the algorithms' characteristics, complexities, and practical applications, such as the use of heuristics in informed searches and strategies like hill climbing and minimax. Additionally, it covers optimizations like alpha-beta pruning to improve efficiency in search processes.


























































![ANPARA THERMAL POWER STATION[1] sangam.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/anparathermalpowerstation1sangam-251121115219-9261cde4-thumbnail.jpg?width=640&height=640&fit=bounds)
















