Download as PDF, PPTX

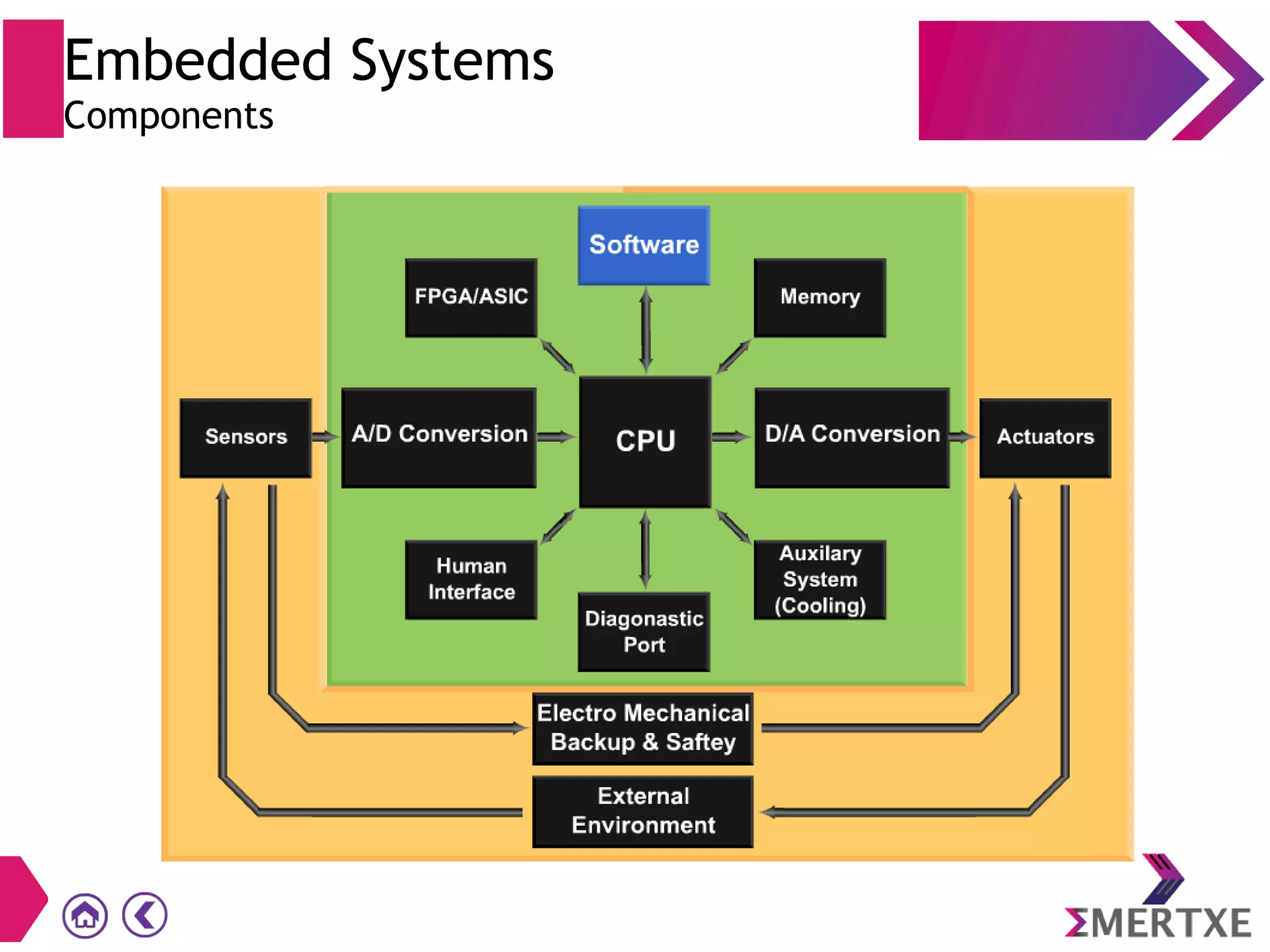



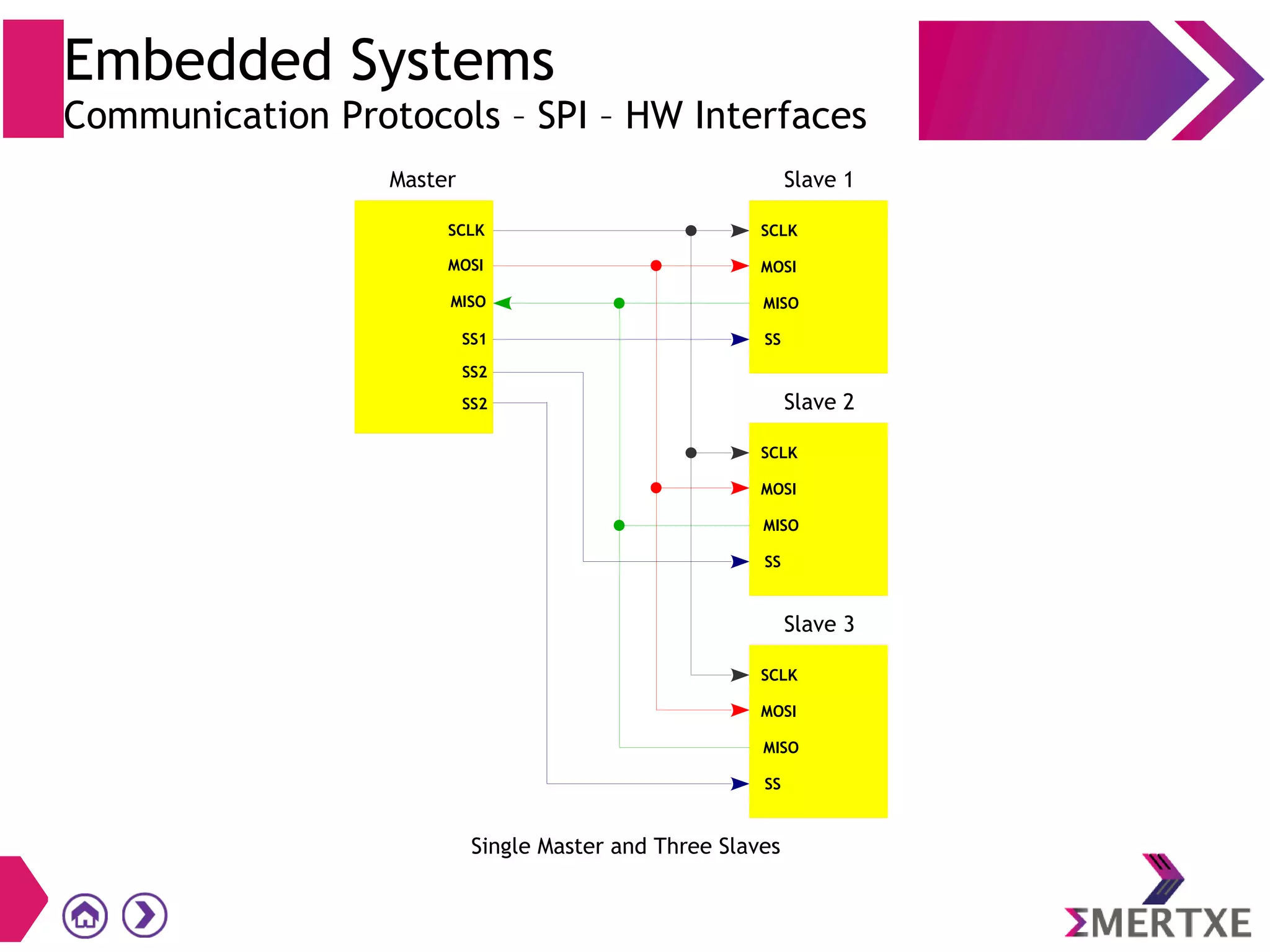
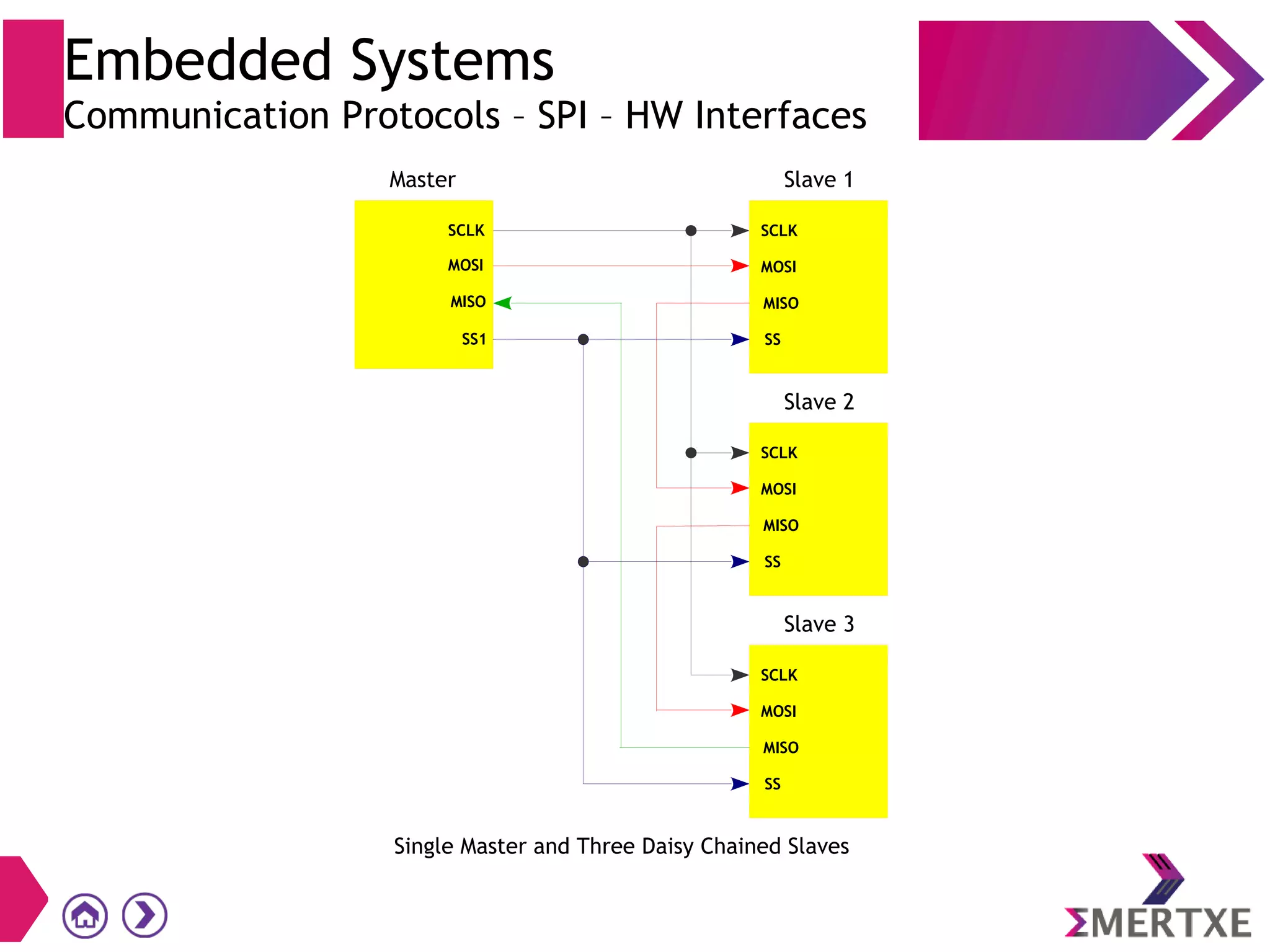

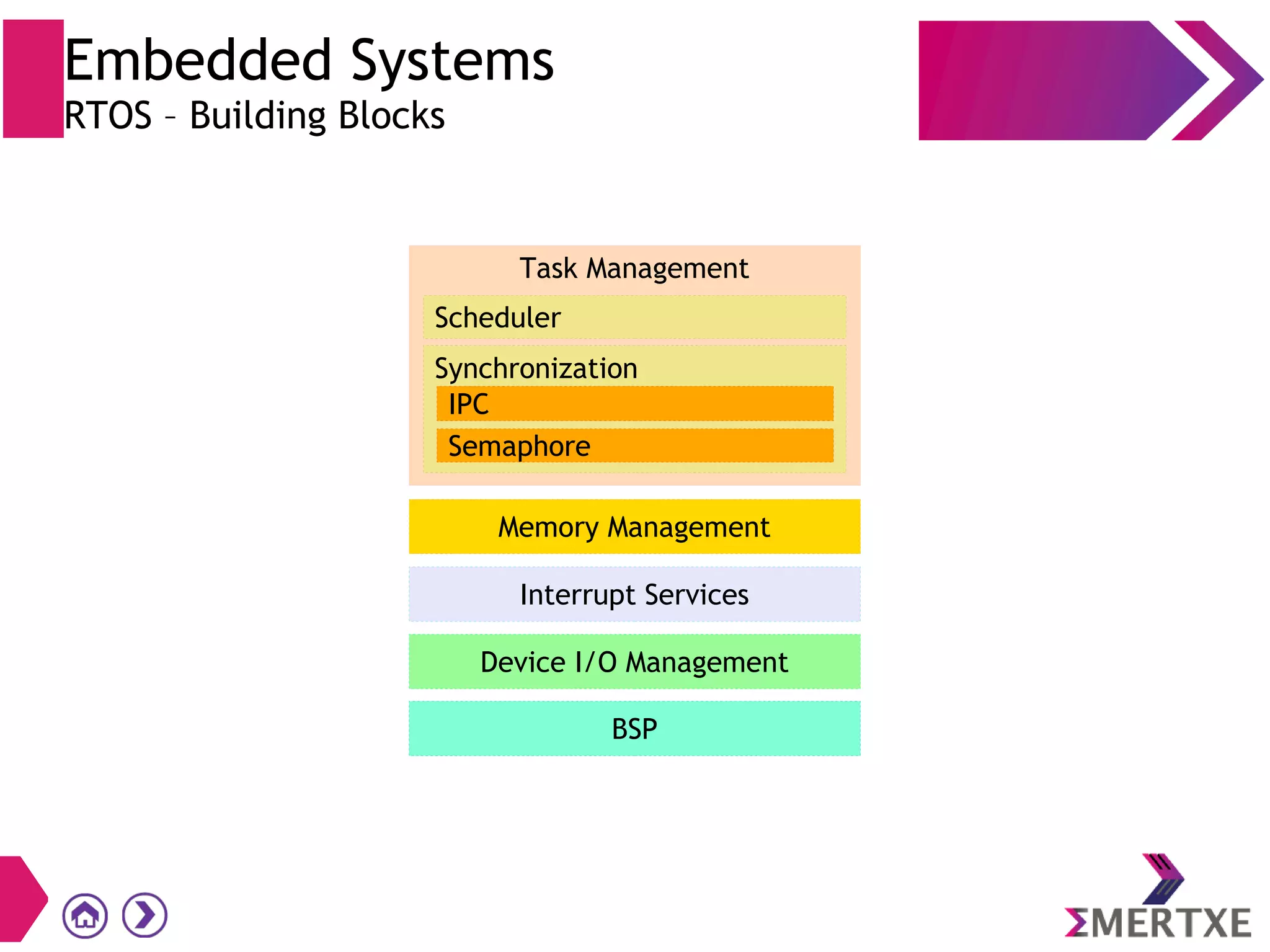






































This document provides an introduction to key concepts in embedded systems including embedded system components, requirements, trends, common design metrics, development tools, communication protocols like I2C and SPI, and real-time operating systems (RTOS). It defines embedded systems and how they differ from general purpose systems. It also discusses RTOS features like multitasking, task priority, inter-task communication, and how they help achieve real-time capabilities. Key sections of the RTOS are identified including task management, scheduling, synchronization, and interrupt handling.

















































































![Support, Monitoring, Continuous Improvement & Scaling Agentic Automation [3/3]](https://cdn.slidesharecdn.com/ss_thumbnails/agenticcommunityseries-day3-cfd-251120170304-ddef8112-thumbnail.jpg?width=640&height=640&fit=bounds)


