Downloaded 194 times

![3. MATLAB Code:
Part-1. Image Processing Code:
F = menu('Choose a database set','Test Set','Train Set');
if F==1
K = menu('Choose a file','Test A');
if K == 1
loop=3
for i=1:loop
string = ['testa' num2str(i) '.tif'];
Rimages{i} = imread(string);
end
end
end;
if F==2
loop=3
L = menu('Choose a file','Train A');
if L == 1
for i=1:loop
string = ['traina' num2str(i) '.tif'];
Rimages{i} = imread(string);
end
end
end
for i=1:loop
T_{i}=imresize(Rimages{i},[150,140]);
x = [0 -1 1];
y = [0 1 -1]';
dx_{i} = convn(T_{i},x,'same');
dy_{i} = convn(T_{i},y,'same');
gradient_{i} = dy_{i} ./dx_{i};
theta_{i} = atan(gradient_{i});
cl{i}= im2col(theta_{i},[1 1],'sliding');
N{i} = (cl{i}*180)/3.14159265359;
c1{i}=(N{i}>0)&(N{i}<10);
s1{i}=sum(c1{i});
c2{i}=(N{i}>10.0001)&(N{i}<20);
s2{i}=sum(c2{i});
c3{i}=(N{i}>20.0001)&(N{i}<30);
sum(c3{i});
s3{i}=sum(c3{i});
c4{i}=(N{i}>30.0001)&(N{i}<40);
sum(c4{i});
s4{i}=sum(c4{i});
c5{i}=(N{i}>40.0001)&(N{i}<50);
sum(c5{i});
s5{i}=sum(c5{i});
c6{i}=(N{i}>50.0001)&(N{i}<60);
sum(c6{i});
s6{i}=sum(c6{i});](https://image.slidesharecdn.com/report-150301082220-conversion-gate01/75/Hand-Gesture-Recognition-using-Neural-Network-7-2048.jpg)
![c7{i}=(N{i}>60.0001)&(N{i}<70);
sum(c7{i});
s7{i}=sum(c7{i});
c8{i}=(N{i}>70.0001)&(N{i}<80);
sum(c8{i});
s8{i}=sum(c8{i});
c9{i}=(N{i}>80.0001)&(N{i}<90);
sum(c9{i});
s9{i}=sum(c9{i});
c10{i}=(N{i}>90.0001)&(N{i}<100);
sum(c10{i});
s10{i}=sum(c10{i});
c11{i}=(N{i}>-89.9)&(N{i}<-80);
sum(c11{i});
s11{i}=sum(c11{i});
c12{i}=(N{i}>-80.0001)&(N{i}<-70);
sum(c12{i});
s12{i}=sum(c12{i});
c13{i}=(N{i}>-70.0001)&(N{i}<-60);
sum(c13{i});
s13{i}=sum(c13{i});
c14{i}=(N{i}>-60.0001)&(N{i}<-50);
sum(c14{i});
s14{i}=sum(c14{i});
c15{i}=(N{i}>-50.0001)&(N{i}<-40);
sum(c15{i});
s15{i}=sum(c15{i});
c16{i}=(N{i}>-40.0001)&(N{i}<-30);
sum(c16{i});
s16{i}=sum(c16{i});
c17{i}=(N{i}>-30.0001)&(N{i}<-20);
sum(c17{i});
s17{i}=sum(c17{i});
c18{i}=(N{i}>-20.0001)&(N{i}<-10);
sum(c18{i});
s18{i}=sum(c18{i});
c19{i}=(N{i}>-10.0001)&(N{i}<-0.0001);
sum(c19{i});
s19{i}=sum(c19{i});
D{i}= [s1{i} s2{i} s3{i} s4{i} s5{i} s6{i} s7{i} s8{i} s9{i} s10{i} s11{i} s12{i} s13{i} s14{i} s15{i} s16{i}
s17{i} s18{i} s19{i}];
D1=D.';
end;
Part-2. Neural Network Code:
fid = fopen('train.txt','rt');
P1 = fscanf(fid,'%f',[19,inf]);
P=P1.';
P=dct(P);](https://image.slidesharecdn.com/report-150301082220-conversion-gate01/75/Hand-Gesture-Recognition-using-Neural-Network-8-2048.jpg)
![fid = fopen('test.txt','rt');
TS1 = fscanf(fid,'%f',[19,inf]);
Z=TS1.';
Z=dct(Z);
fid = fopen('target.txt','rt');
T1 = fscanf(fid,'%f',[1,inf]);
T=T1.';
fid = fopen('a.txt','rt');
Y1 = fscanf(fid,'%f',[1,inf]);
Y=Y1.';
And now use Neural Network Toolbox and train the network and also validate and test the
network.
To start Neural Network Toolbox, use this command: nnstart
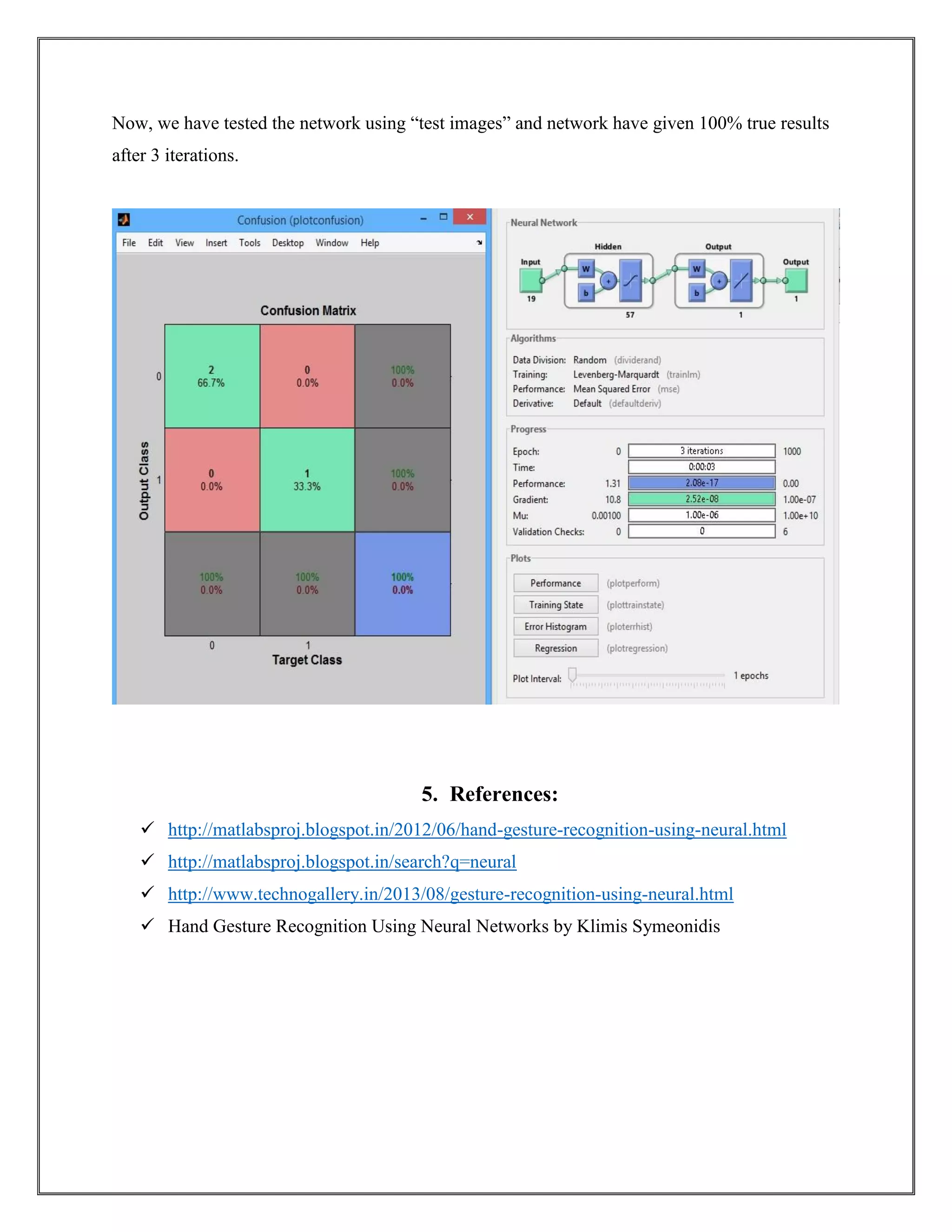
4. Results:
After training the neural network, we got 100% correct outputs for training; this means that
network is trained successfully.](https://image.slidesharecdn.com/report-150301082220-conversion-gate01/75/Hand-Gesture-Recognition-using-Neural-Network-9-2048.jpg)






![3. MATLAB Code:
Part-1. Image Processing Code:
F = menu('Choose a database set','Test Set','Train Set');
if F==1
K = menu('Choose a file','Test A');
if K == 1
loop=3
for i=1:loop
string = ['testa' num2str(i) '.tif'];
Rimages{i} = imread(string);
end
end
end;
if F==2
loop=3
L = menu('Choose a file','Train A');
if L == 1
for i=1:loop
string = ['traina' num2str(i) '.tif'];
Rimages{i} = imread(string);
end
end
end
for i=1:loop
T_{i}=imresize(Rimages{i},[150,140]);
x = [0 -1 1];
y = [0 1 -1]';
dx_{i} = convn(T_{i},x,'same');
dy_{i} = convn(T_{i},y,'same');
gradient_{i} = dy_{i} ./dx_{i};
theta_{i} = atan(gradient_{i});
cl{i}= im2col(theta_{i},[1 1],'sliding');
N{i} = (cl{i}*180)/3.14159265359;
c1{i}=(N{i}>0)&(N{i}<10);
s1{i}=sum(c1{i});
c2{i}=(N{i}>10.0001)&(N{i}<20);
s2{i}=sum(c2{i});
c3{i}=(N{i}>20.0001)&(N{i}<30);
sum(c3{i});
s3{i}=sum(c3{i});
c4{i}=(N{i}>30.0001)&(N{i}<40);
sum(c4{i});
s4{i}=sum(c4{i});
c5{i}=(N{i}>40.0001)&(N{i}<50);
sum(c5{i});
s5{i}=sum(c5{i});
c6{i}=(N{i}>50.0001)&(N{i}<60);
sum(c6{i});
s6{i}=sum(c6{i});](https://crownmelresort.com/image.slidesharecdn.com/report-150301082220-conversion-gate01/75/Hand-Gesture-Recognition-using-Neural-Network-7-2048.jpg)
![c7{i}=(N{i}>60.0001)&(N{i}<70);
sum(c7{i});
s7{i}=sum(c7{i});
c8{i}=(N{i}>70.0001)&(N{i}<80);
sum(c8{i});
s8{i}=sum(c8{i});
c9{i}=(N{i}>80.0001)&(N{i}<90);
sum(c9{i});
s9{i}=sum(c9{i});
c10{i}=(N{i}>90.0001)&(N{i}<100);
sum(c10{i});
s10{i}=sum(c10{i});
c11{i}=(N{i}>-89.9)&(N{i}<-80);
sum(c11{i});
s11{i}=sum(c11{i});
c12{i}=(N{i}>-80.0001)&(N{i}<-70);
sum(c12{i});
s12{i}=sum(c12{i});
c13{i}=(N{i}>-70.0001)&(N{i}<-60);
sum(c13{i});
s13{i}=sum(c13{i});
c14{i}=(N{i}>-60.0001)&(N{i}<-50);
sum(c14{i});
s14{i}=sum(c14{i});
c15{i}=(N{i}>-50.0001)&(N{i}<-40);
sum(c15{i});
s15{i}=sum(c15{i});
c16{i}=(N{i}>-40.0001)&(N{i}<-30);
sum(c16{i});
s16{i}=sum(c16{i});
c17{i}=(N{i}>-30.0001)&(N{i}<-20);
sum(c17{i});
s17{i}=sum(c17{i});
c18{i}=(N{i}>-20.0001)&(N{i}<-10);
sum(c18{i});
s18{i}=sum(c18{i});
c19{i}=(N{i}>-10.0001)&(N{i}<-0.0001);
sum(c19{i});
s19{i}=sum(c19{i});
D{i}= [s1{i} s2{i} s3{i} s4{i} s5{i} s6{i} s7{i} s8{i} s9{i} s10{i} s11{i} s12{i} s13{i} s14{i} s15{i} s16{i}
s17{i} s18{i} s19{i}];
D1=D.';
end;
Part-2. Neural Network Code:
fid = fopen('train.txt','rt');
P1 = fscanf(fid,'%f',[19,inf]);
P=P1.';
P=dct(P);](https://crownmelresort.com/image.slidesharecdn.com/report-150301082220-conversion-gate01/75/Hand-Gesture-Recognition-using-Neural-Network-8-2048.jpg)
![fid = fopen('test.txt','rt');
TS1 = fscanf(fid,'%f',[19,inf]);
Z=TS1.';
Z=dct(Z);
fid = fopen('target.txt','rt');
T1 = fscanf(fid,'%f',[1,inf]);
T=T1.';
fid = fopen('a.txt','rt');
Y1 = fscanf(fid,'%f',[1,inf]);
Y=Y1.';
And now use Neural Network Toolbox and train the network and also validate and test the
network.
To start Neural Network Toolbox, use this command: nnstart
4. Results:
After training the neural network, we got 100% correct outputs for training; this means that
network is trained successfully.](https://crownmelresort.com/image.slidesharecdn.com/report-150301082220-conversion-gate01/75/Hand-Gesture-Recognition-using-Neural-Network-9-2048.jpg)


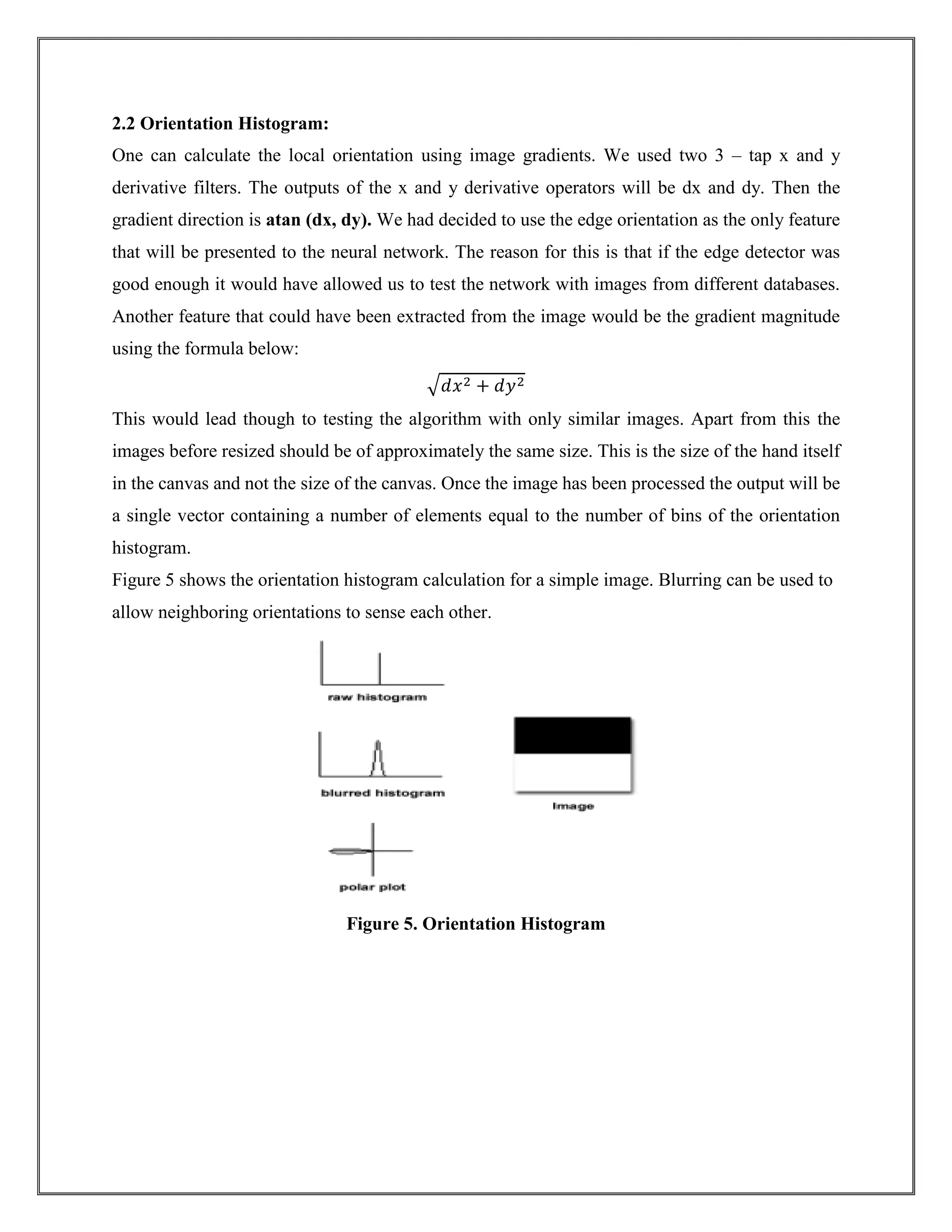
This report discusses a project on hand gesture recognition using neural networks, developed by students at VIT University. It highlights the importance of such technology for applications like computer games and machinery control, emphasizing static gesture recognition and the utilization of American Sign Language gestures. The project includes the creation of an image database, the implementation of computer vision algorithms, and successful training results with a neural network achieving 100% accuracy.





















































![[IJET-V1I5P9] Author: Prutha Gandhi, Dhanashri Dalvi, Pallavi Gaikwad, Shubha...](https://cdn.slidesharecdn.com/ss_thumbnails/ijet-v1i5p9-151120174839-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)






























