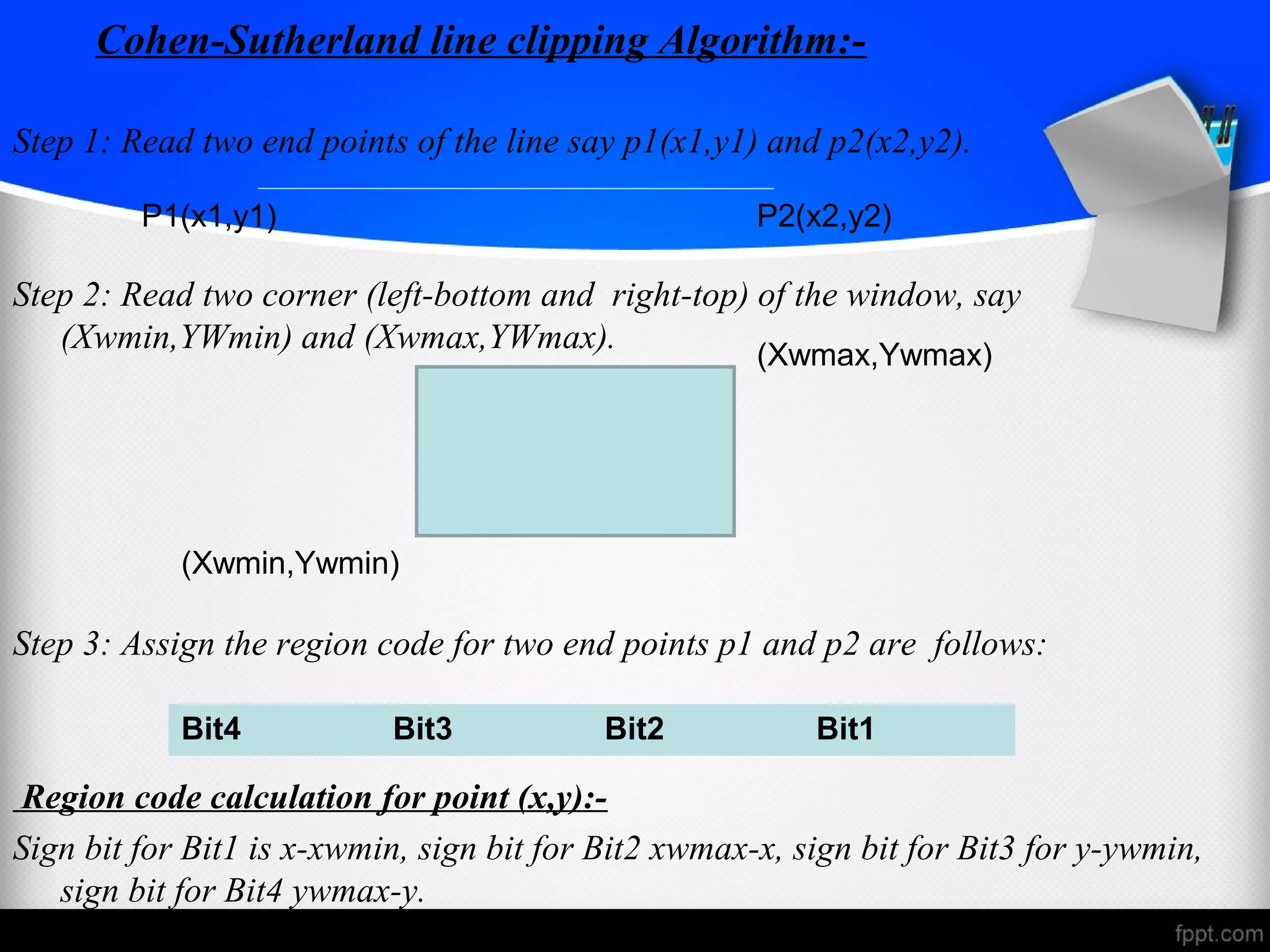
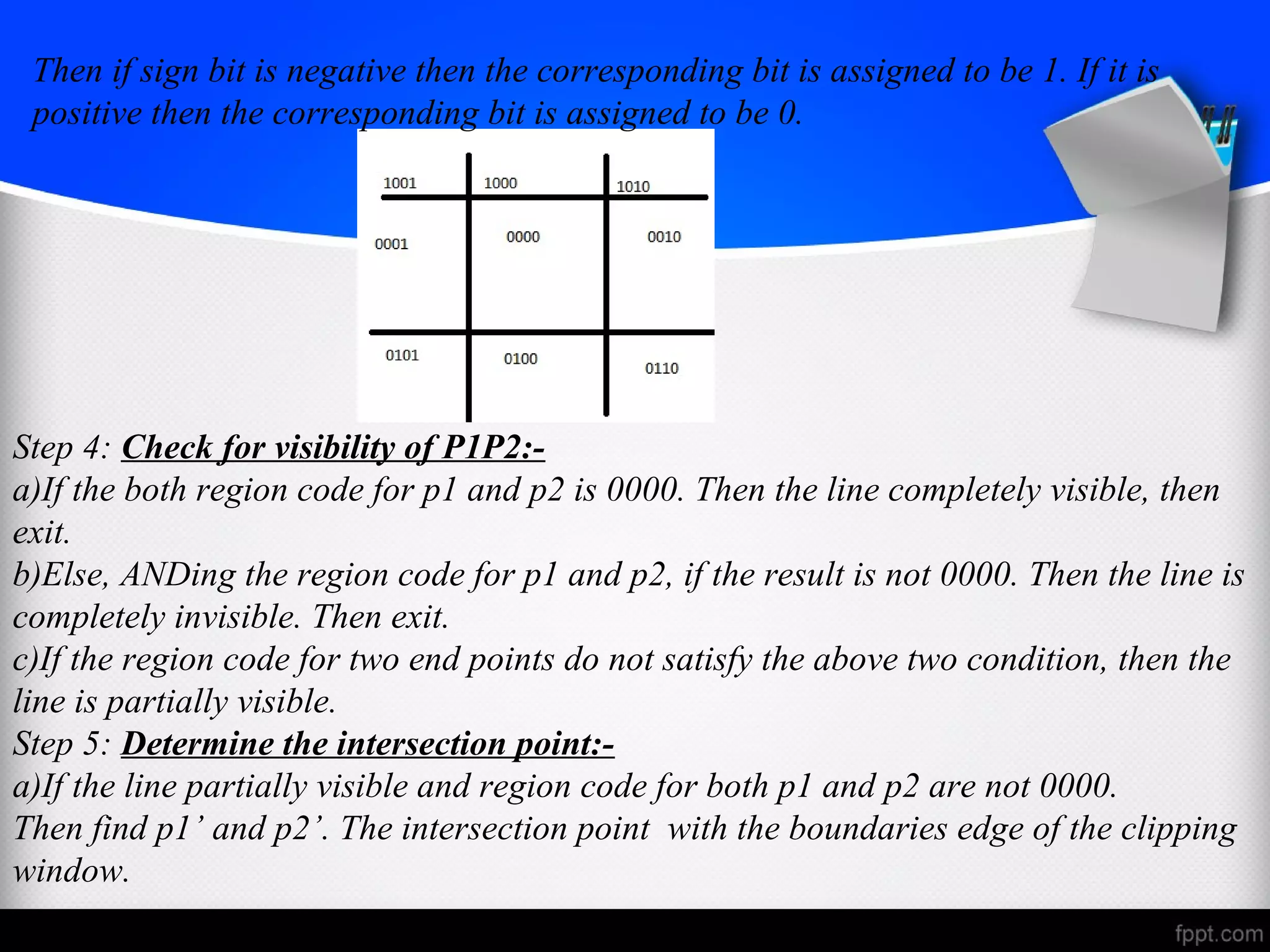
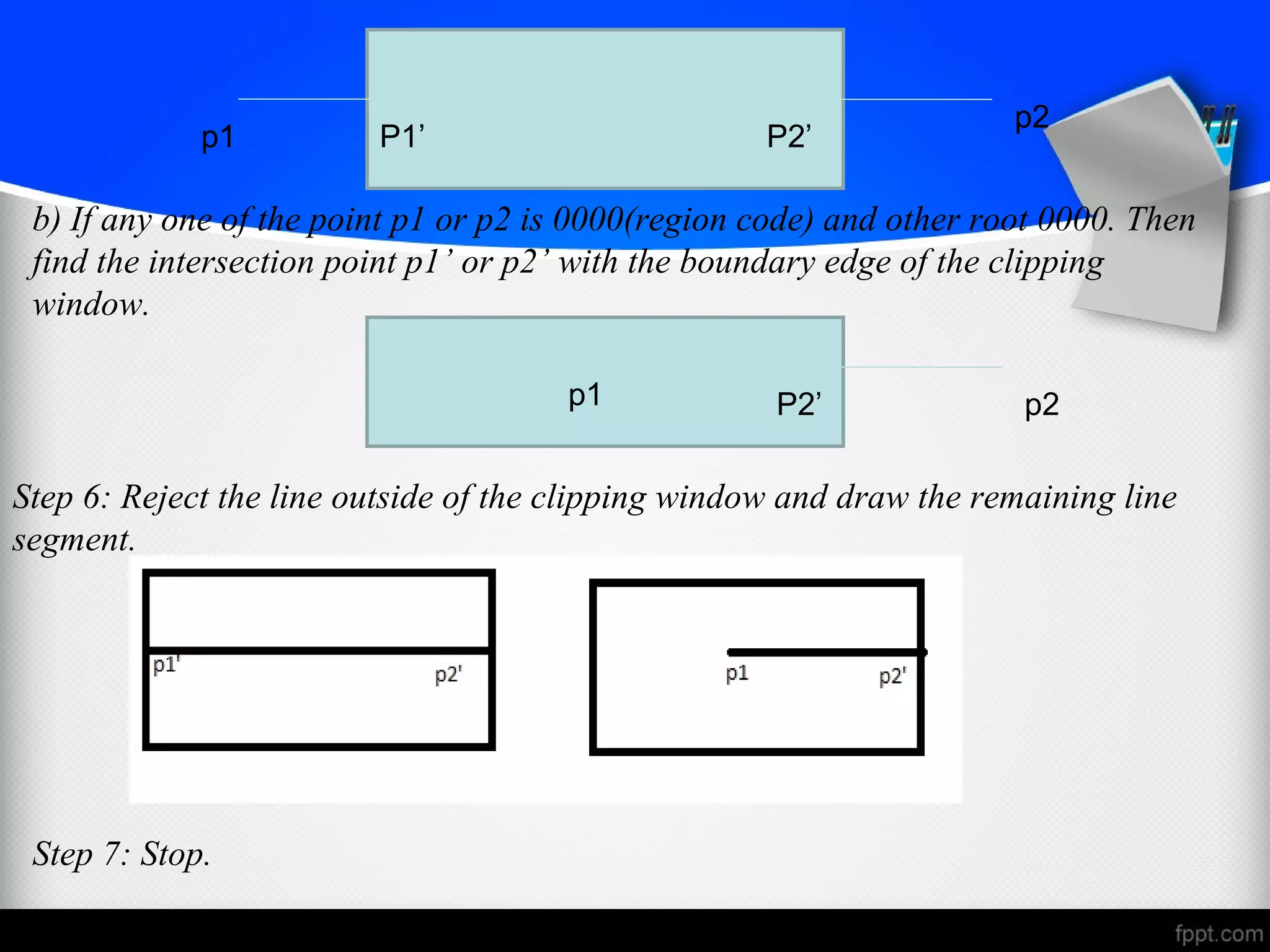
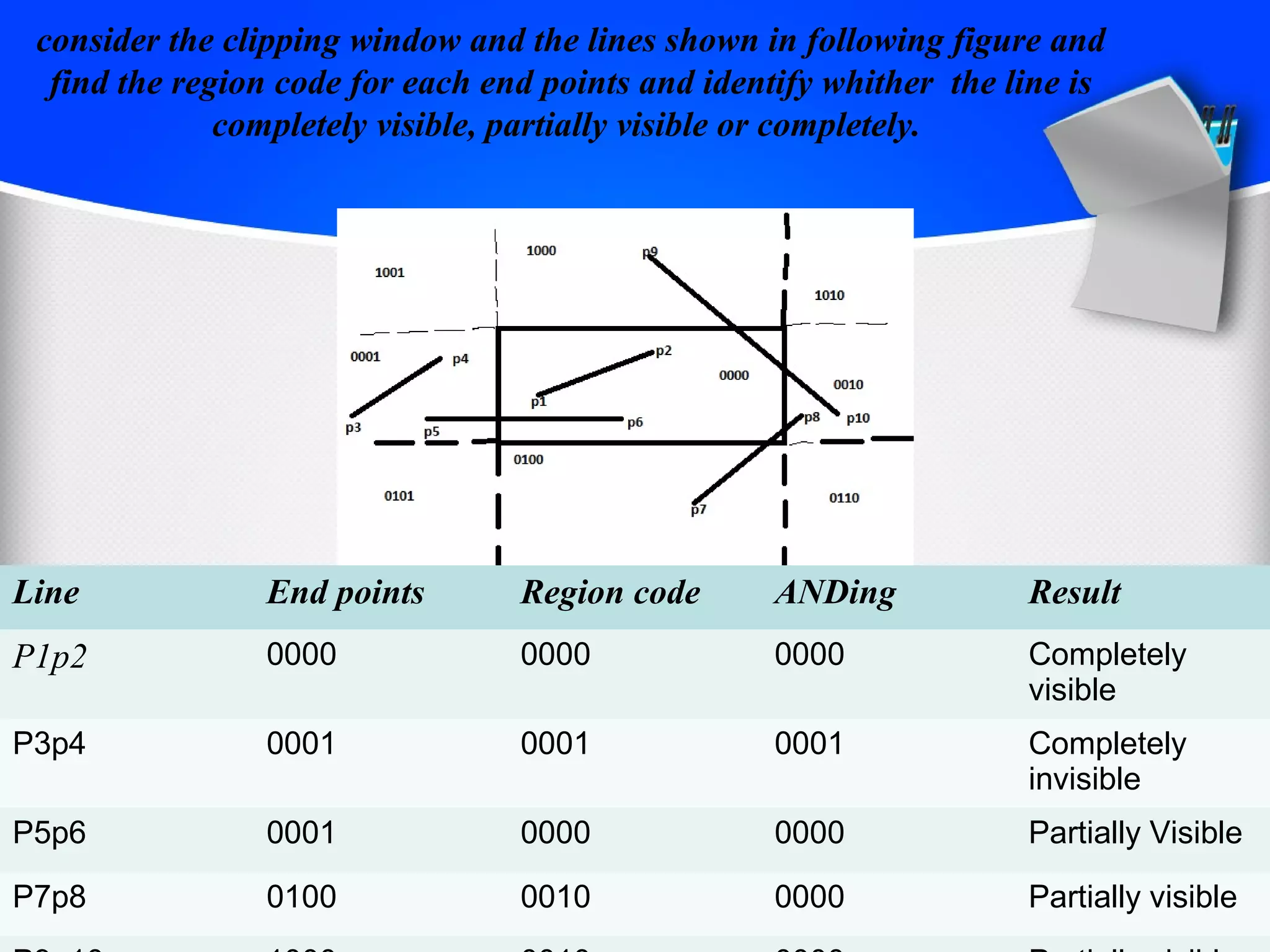
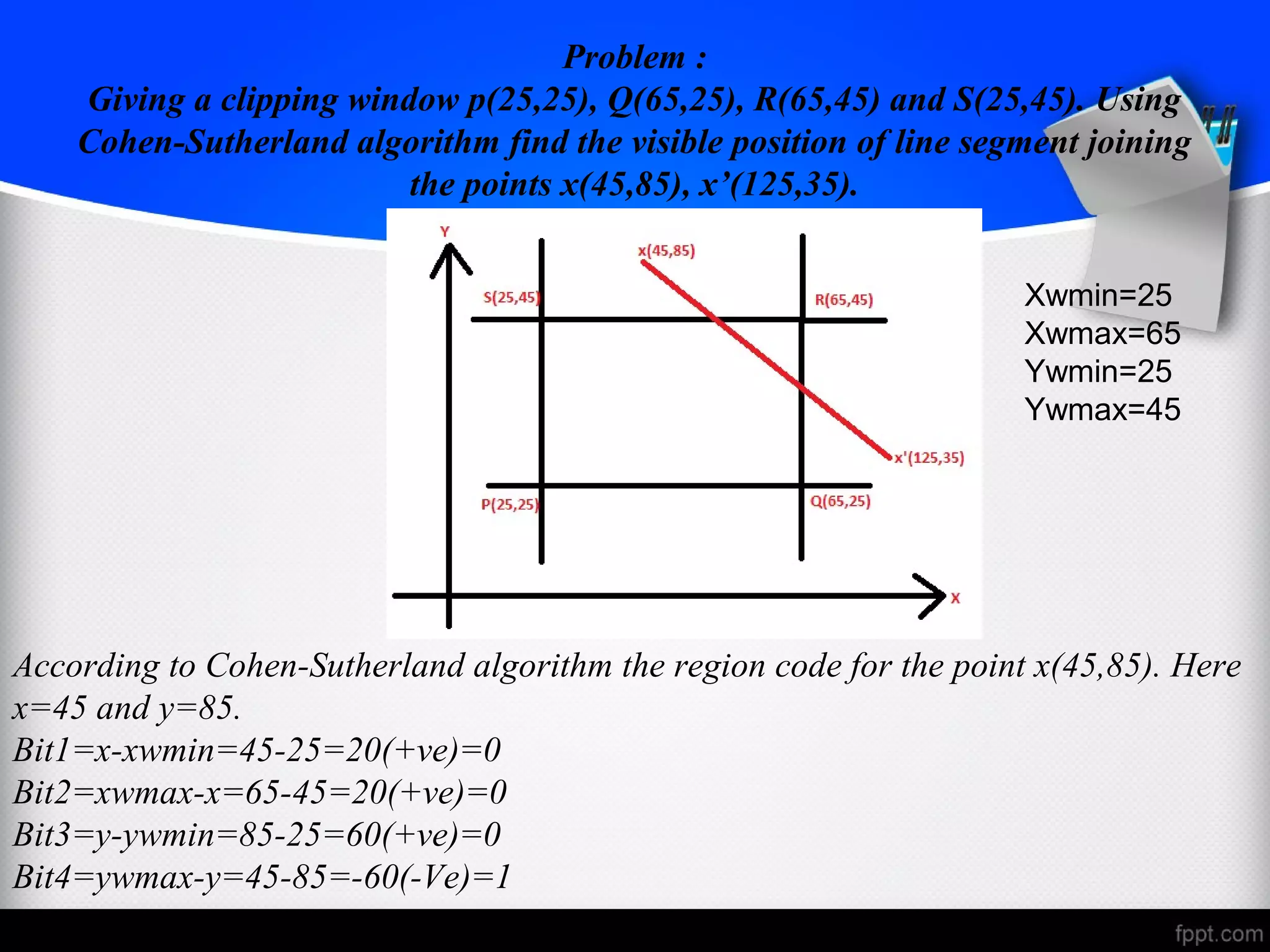
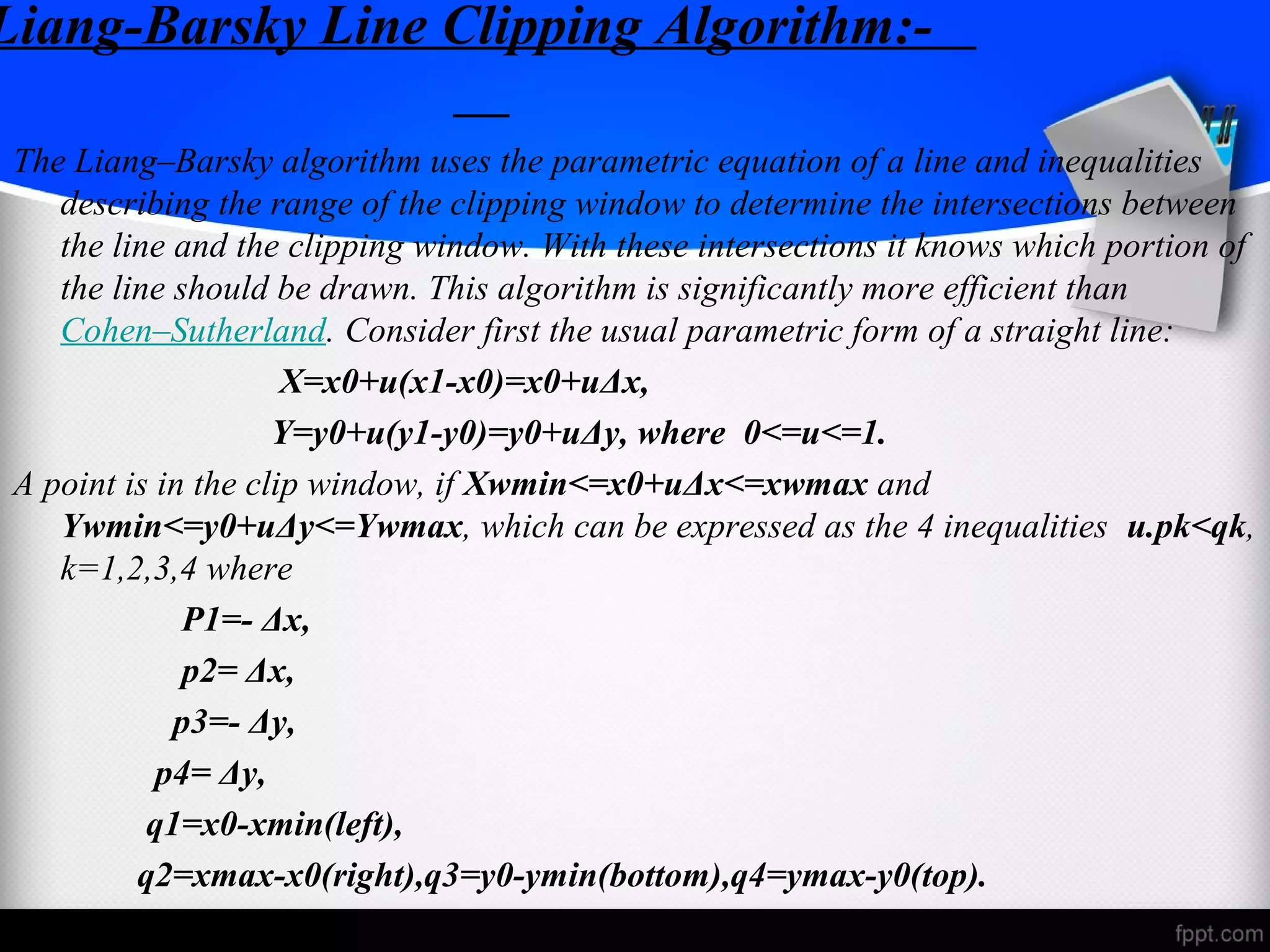
The document describes two line clipping algorithms: Cohen-Sutherland and Liang-Barsky. Cohen-Sutherland assigns region codes to line endpoints and checks for complete visibility, invisibility, or partial visibility. It then finds intersection points if the line is partially visible. Liang-Barsky uses the parametric line equation and clipping window inequalities to determine intersection points u1 and u2, clipping the line between those points if u1 < u2. Liang-Barsky is generally more efficient as it requires only one division to update u1 and u2, while Cohen-Sutherland may repeatedly calculate unnecessary intersections.