Download to read offline

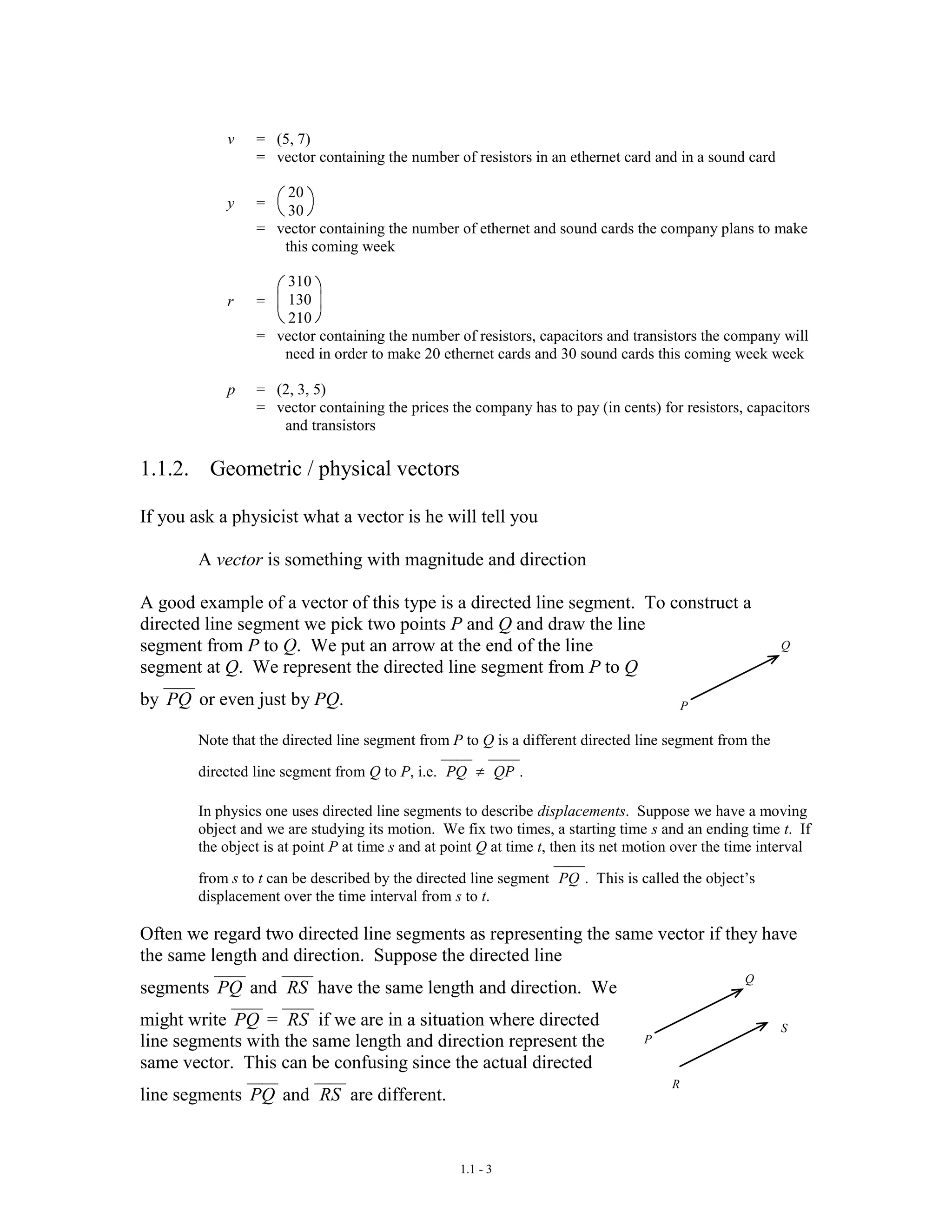








This document discusses three types of vectors: numeric vectors, geometric/physical vectors, and functions. Numeric vectors are lists of numbers. Geometric/physical vectors have magnitude and direction, like directed line segments representing displacements. Functions can also be viewed as vectors. All three types of vectors can be added, subtracted, and multiplied by numbers. Numeric vectors correspond to geometric vectors through their components in a coordinate system. Forces are represented as geometric vectors with magnitude and direction.