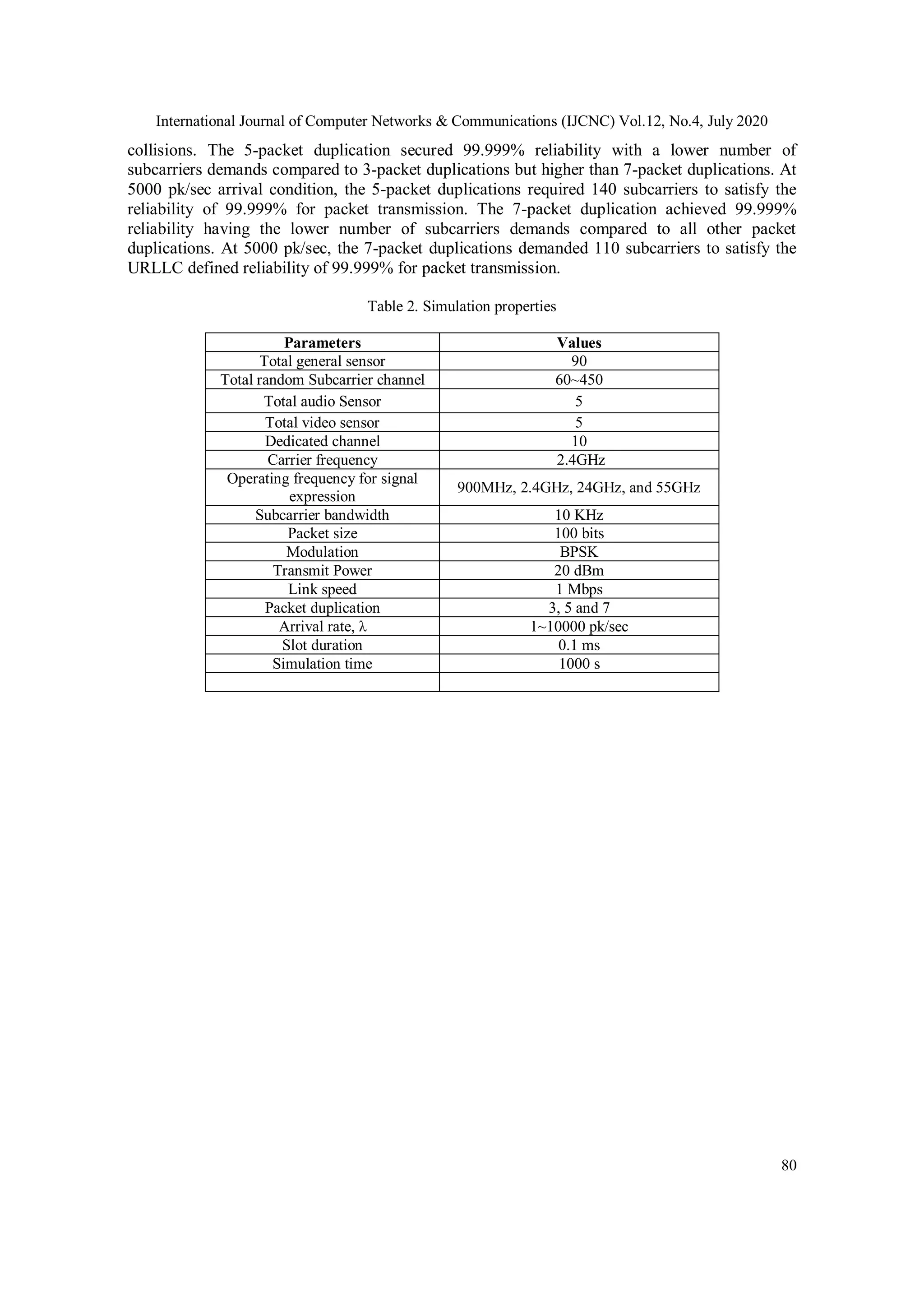
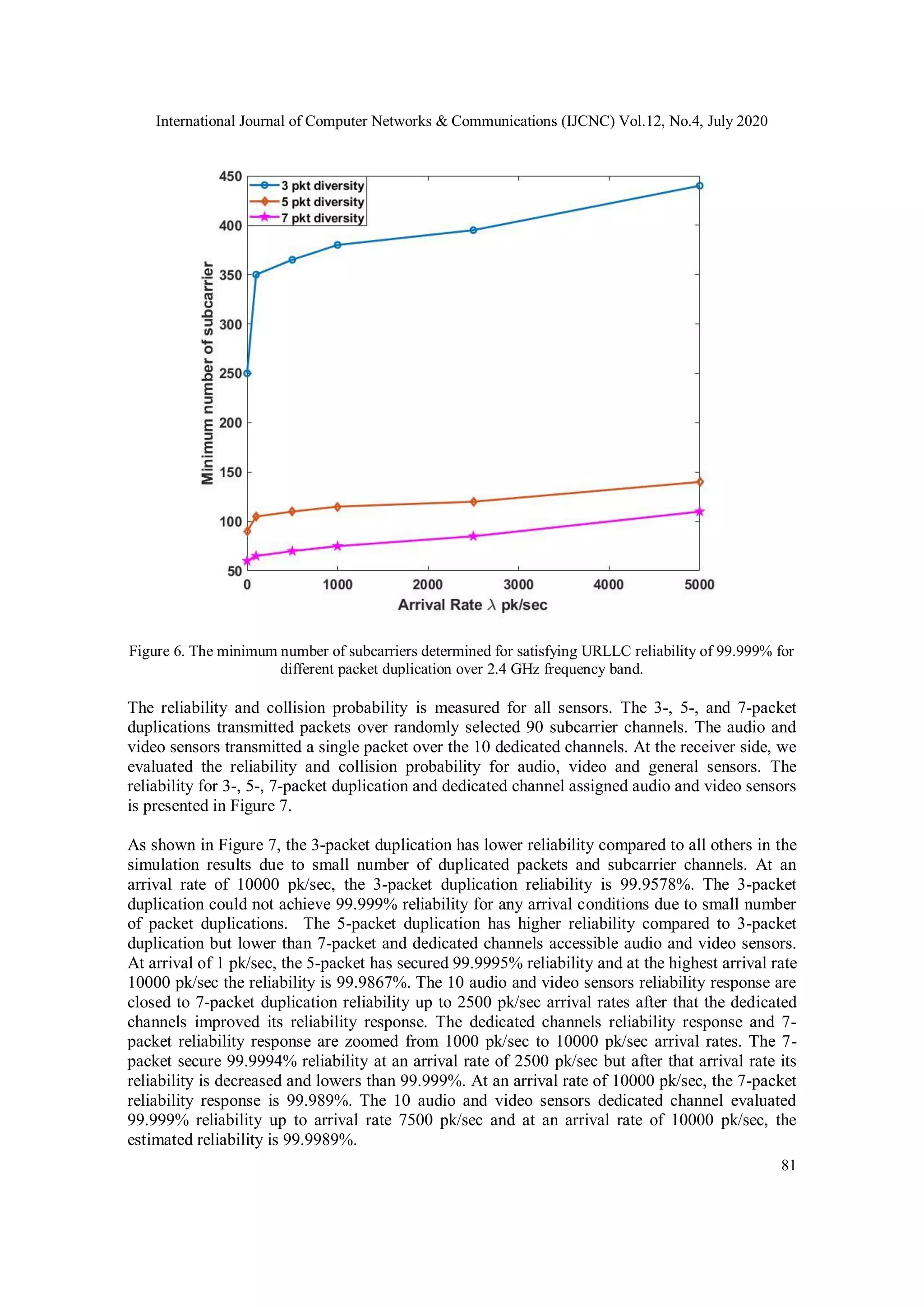
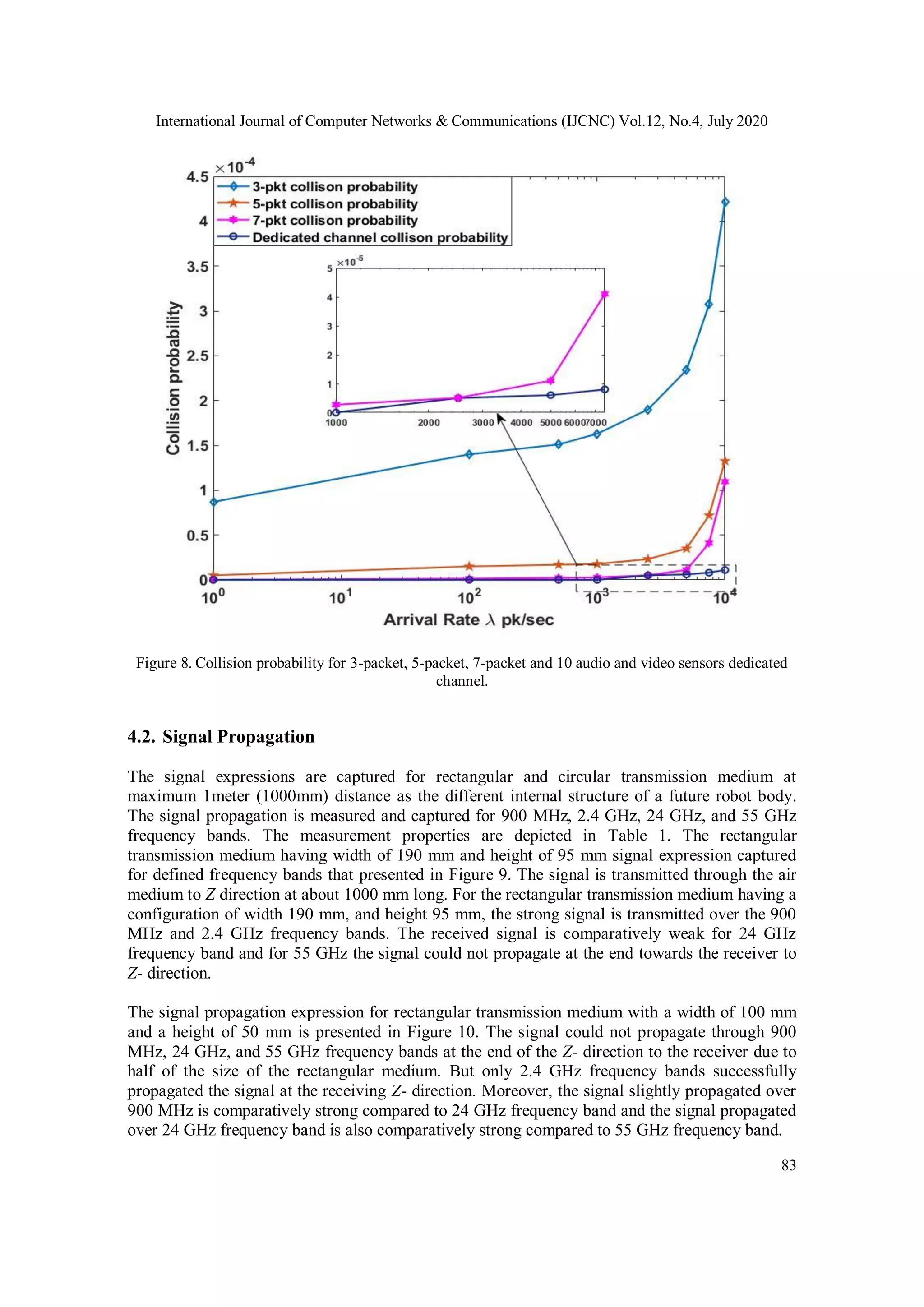
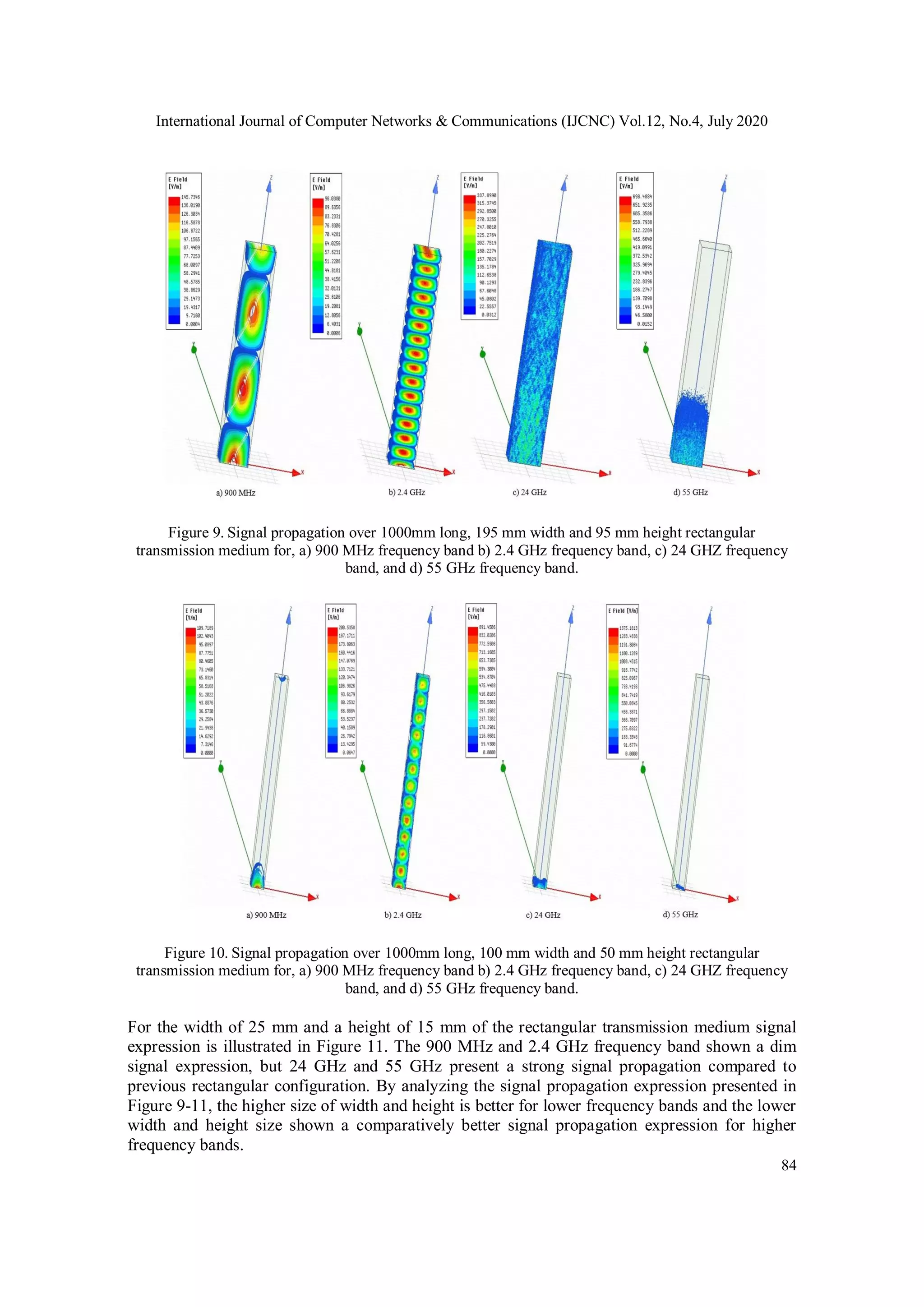
This paper introduces a hybrid access scheme (HAS) for improving robot communication by using fewer wires and ensuring high reliability with low latency. The HAS employs packet diversity and retains multiple subcarriers for transmitting various types of sensor data, such as audio, video, and general signals, simultaneously. The authors evaluate the system's performance through simulations and signal propagation analysis, meeting the ultra-reliable low latency communication (URLLC) standards.
![International Journal of Computer Networks & Communications (IJCNC) Vol.12, No.4, July 2020
DOI: 10.5121/ijcnc.2020.12405 71
ROBOTIC INNER SIGNAL PROPAGATION AND
RANDOM ACCESS OVER HYBRID ACCESS SCHEME
Abir Hossain, Zhenni Pan, Megumi Saito, Jiang Liu and Shigeru Shimamoto
Department of Computer Science and Communications Engineering,
Waseda University, Tokyo 169-0072, Japan
ABSTRACT
This paper proposes a Hybrid Access Scheme (HAS) aiming to convert a future robot’s backend
communication system by a finite number of sensors instead of using a lot of wires. To replace this
communication, the HAS needs to assure higher reliability within stringent low latency packet
transmission. In this paper, the HAS utilizes the packet diversity principle and forward multiple copies of
the same packet over the massive number of subcarrier channels. The HAS assigns the random accessing
to select a subcarrier channel for general packet transmitting sensors. The audio and video sensors
transmit packets over the dedicated channels to avoid collisions. The HAS system allows transmitting
audio, video and general sensors simultaneously. The minimum number of subcarriers to satisfy the
URLLC reliability requirement of 99.999% is evaluated for different packet duplications over different
arrival condition.The HAS system’s reliability and collision probability are evaluated in MATLAB
simulator for different packet duplication over different arrival condition. Moreover, the signal
propagation expressions are captured using ANSYS HFSS software for rectangular and circular
transmission medium over the 900 MHz, 2.4 GHz, 24 GHz, and 55 GHz frequency bands for different
structural configurations.
KEYWORDS
Hybrid Access Scheme, Signal Propagation, Random Access, reliability, URLLC
1. INTRODUCTION
In the state-of-the-art technology, wireless sensor converted system is getting more attention day
by day. A wireless sensor converted system being demanded due to its mobility, scalability,
flexibility, cost-efficiency, and faster deployment. However, a robot consists of multiple
elements, and many wires are usually required as the communication backbone among attached
different elements [1]. A wire connected robot gain more weight and consume more power for its
usual movement. Moreover, the maintenance become complex when any internal wires get
disconnected during operation. By increasing the demands of wireless sensor connected system
and to resolve the defined problems, we intend to convert a wire system into a wireless one by a
Hybrid Access Scheme (HAS). A typical wireless sensor connected robot is presented in Figure 1.
As illustrated in Figure 1, there are three types of sensors (Audio, video and general sensor)
deployed ubiquity over the robotic structure and utilize hybrid access scheme to ensure ultra -
reliable low latency communication. The 3GPP sets the standard for Ultra-Reliable Low Latency
Communication (URLLC) reliability requirement for a single packet transmission having size of
32 bytes is 1-10-5
(alternatively 99.999%) with an interface latency of 1ms [2,3]. Due to ensure
this higher reliability and latency, the HAS adopts packet diversity principle and transmits over
massive number of subcarrier channels in almost error-free and interference-free manner.](https://image.slidesharecdn.com/12420cnc05-200817043713/75/ROBOTIC-INNER-SIGNAL-PROPAGATION-AND-RANDOM-ACCESS-OVER-HYBRID-ACCESS-SCHEME-1-2048.jpg)
![International Journal of Computer Networks & Communications (IJCNC) Vol.12, No.4, July 2020
72
Figure 1. Wireless sensor connected robot.
The HAS system assumed to assign a massive number of orthogonal subcarrier channels to
transmit packets from sensor to receiver site. Due to consider small area inside a robotic
structure, we assumed that the assign massive number of channels will not interfere with the
central mobile bandwidth assignment.
1.1. Related works
A several number of research works conducted to convert an established into a wireless system
by a finite number of sensors. Under the 5G communication domain, a sensor communication
based structural health monitoring and early earthquake warning system is presented in [4] that
give a proposal of monitoring and warning generation system in presence of seismic events. A
wireless sensor connected structural health monitoring system proposed for an airplane is studied
in [5] where sensor nodes observing the health conditions of an airplane deployed and covered
the entire area of an aircraft. These nodes evaluate throughput, the data dropped rate and the
delay for a maximum of 7 nodes as approximately 12000 bps, 180 bps, and115ms, respectively.
A real time elderly health care monitoring system is proposed in[6] that utilize a wireless sensor
network where bracelet-type devices are equipped with sensors applied to each patient under the
monitoring system of the healthcare that received data in real time and stored in a central
monitoring server. A spacecraft automation and communication based on sensor is studied in [7],
that transmit 988 B payload of sensor data in UWB in spacecraft networks over the different
frequency bands using a TDMA protocol having a short 5ms time slot. A wireless sensor-
connected robot’s OFSMA MAC protocol is accepted in [8], which considered only a single
frequency band. The main objectives of that proposed work are to determine the minimum
number of channels to satisfy 99.999% reliability and air-interface latency for single-packet
uplink communication.
The URLLC is a challenging service launched by 5G communication due to its higher reliability
requirement and lower latency bound. The URLLC is specially designed to overcome the
mission-critical system [9,10] where the link reliability is highly expected in a strict latency
requirement. The URLLC service is highly demanded and attracts attention a lot of researcher](https://image.slidesharecdn.com/12420cnc05-200817043713/75/ROBOTIC-INNER-SIGNAL-PROPAGATION-AND-RANDOM-ACCESS-OVER-HYBRID-ACCESS-SCHEME-2-2048.jpg)
![International Journal of Computer Networks & Communications (IJCNC) Vol.12, No.4, July 2020
73
due to its exciting and interesting applications. Among the different applications, the URLLC is
applicable in reliable remote action with robots and coordination among vehicles [11], tactile
internet [12], augmented or virtual reality (AR/VR) [13] and many more. This research work
[14] presents an emerging system of URLLC and eMBB where the time is divided into slots and
the time slot is further subdivided into minislots. The URLLC data is overlapped with eMBB
traffic and transmitted over the channel using superposition/puncturing and received successfully
using successive interference cancellation method. The URLLC is sensitive to its latency of the
packet transmission. This research [15] covers URLLC and eMBB resource slicing over minislots
in a risk-sensitive approach considering Conditional Value at Risk (CVaR) by managing properly
both eMBB users scheduling and URLLC slot placement for the downlink communication. An
unmanned aerial vehicle (UAV) based relay system is analyzed in [16] where the data is
transmitted under the URLLC requirements. This research work subjected to optimize the
blocklength allocation and minimize the decoding error probability under the latency
requirement.
There are several random accessing protocols studied in the slotted ALOHA system to
achieve the expected reliability and latency defined in URLLC. A contention-based slotted
ALOHA system has been proposed in [17] that adopts multichannel, multipacket diversity and
transmit multiple copies of the same packets in consecutive slots to improve system reliability,
and to reduce latency to satisfy URLLC’s conditions. Multichannel random accessing using
OFDMA is analyzed in [18], which proposed a fast retrial algorithm to forward a packet into a
frequency diversity system after a collision in a slotted ALOHA system. A multi-packet
messaging system in a cluster-based environment analysed in [19] where the multiple packets
forwarded into different slots and having an independent frequency is to improve the system
throughput.
1.2. Contributions
The existing research work is not suitable to convert our proposed objective to convert a future
robot’s internal communication developed by sensors. To implement our proposed aim, we
propose a hybrid access scheme. The main contributions of the paper are listed below:
We propose a new hybrid access scheme (HAS) for a future robot’s internal communication
system. The HAS scheme ensures the higher packet transmission reliability of the audio,
video, and randomly transmitted general sensors over the differently allocated subcarrier
channels.
We introduce a system model to represent the hybrid access scheme’s total transmitted
packet signal for a single Transmission Time Interval (TTI) slot, introduced AWGN noise
into the channel and finally the received packet signal at the receiver site.
We determine the minimum number of subcarriers required to satisfy the reliability of
99.999% defined by URLLC for different packet duplication over variable arrival
conditions.
We evaluate the HAS system’s packet transmission reliability and collision probability for
fixed channel conditions by assigning sensor and subcarrier channel ratio as 1:1 with the
variation of different packet duplications and low to higher arrival conditions.](https://image.slidesharecdn.com/12420cnc05-200817043713/75/ROBOTIC-INNER-SIGNAL-PROPAGATION-AND-RANDOM-ACCESS-OVER-HYBRID-ACCESS-SCHEME-3-2048.jpg)
![International Journal of Computer Networks & Communications (IJCNC) Vol.12, No.4, July 2020
74
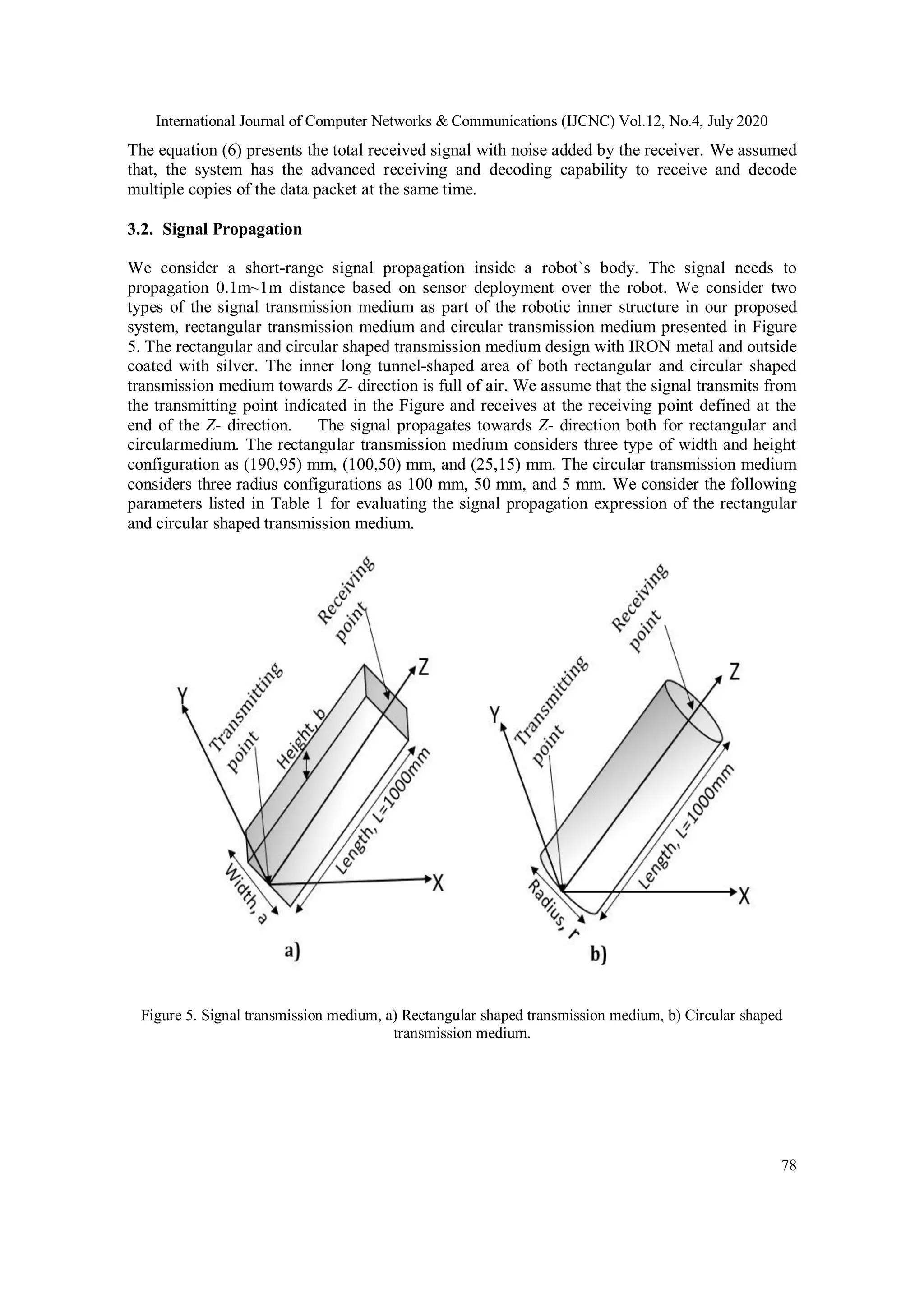
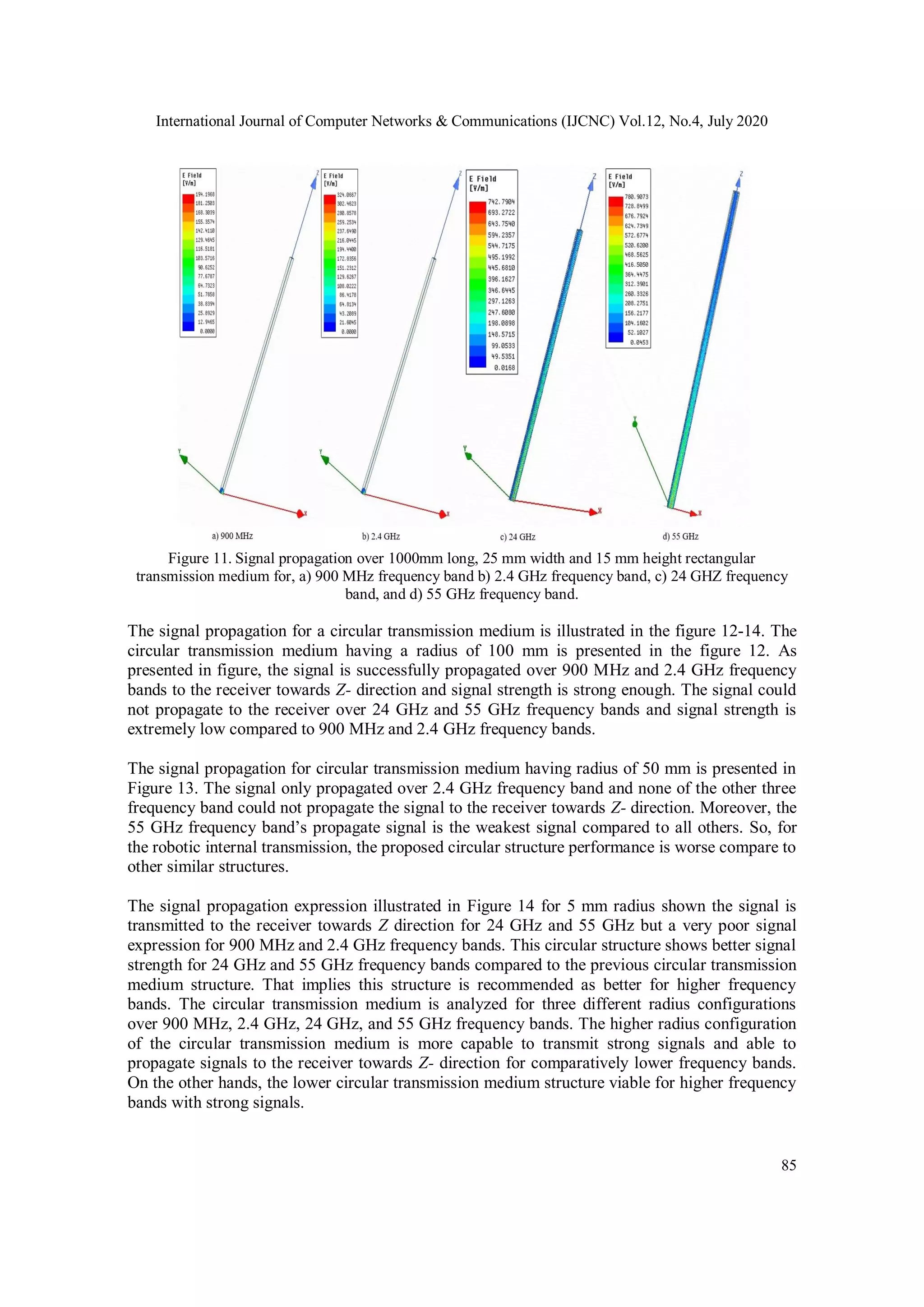
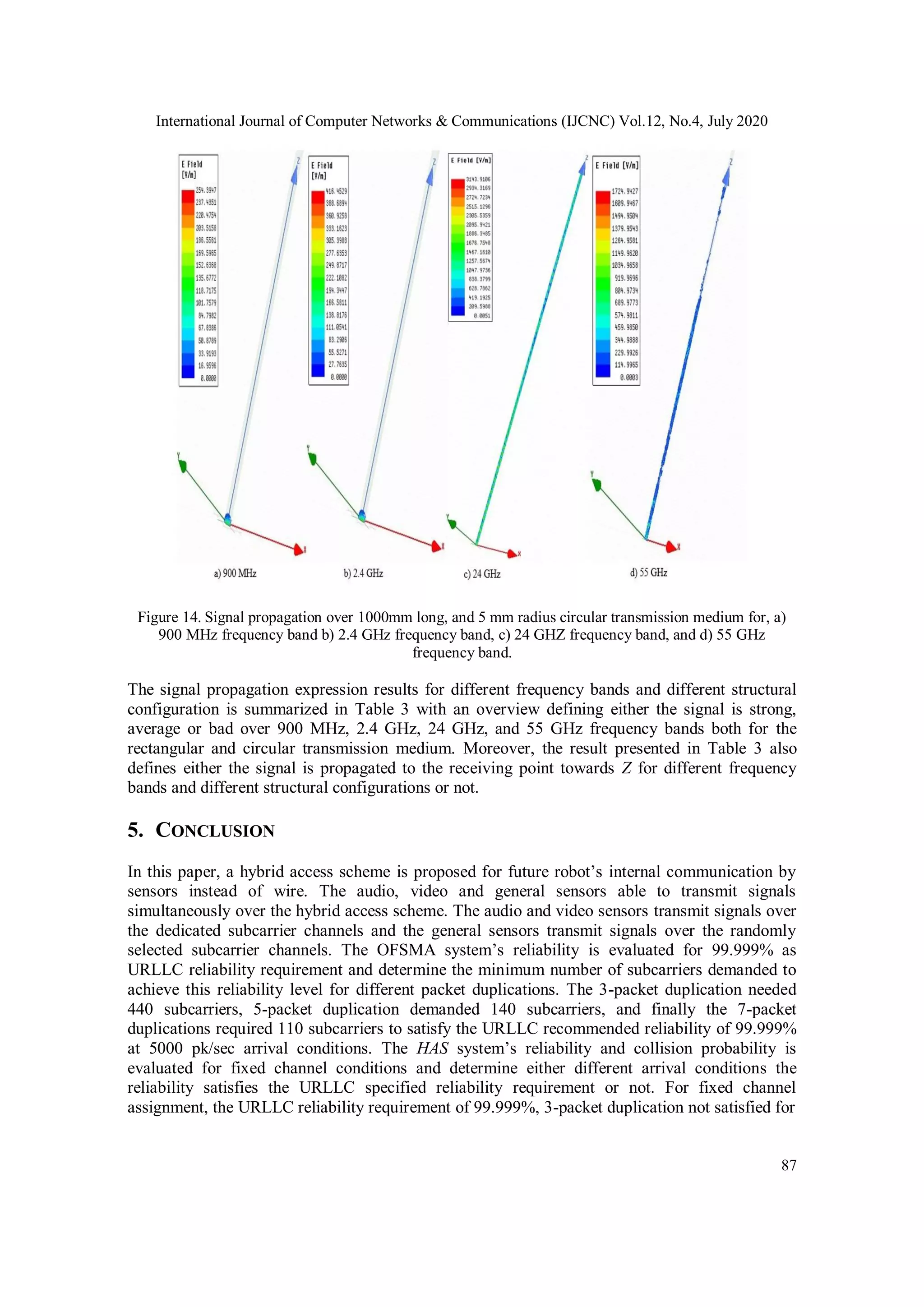
We capture the signal propagation expression for rectangular and circular transmission
medium as part of a robotic body structure for different structural configurations over
diverse frequency bands and determine the success or failure transmission for various
structural configurations.
The rest of this paper is organized as follows: Section 2 explains the details of the hybrid access
scheme. In Section 3 represents the system model of the hybrid access scheme, presents the
signal expression of the transmitted and received signals. Moreover, in section 3 presents a
detailed explanation about the structure and properties of the rectangular and circular
transmission medium. The simulation results are presented in Section 4. Finally, this paper is
summarized in Section 5.
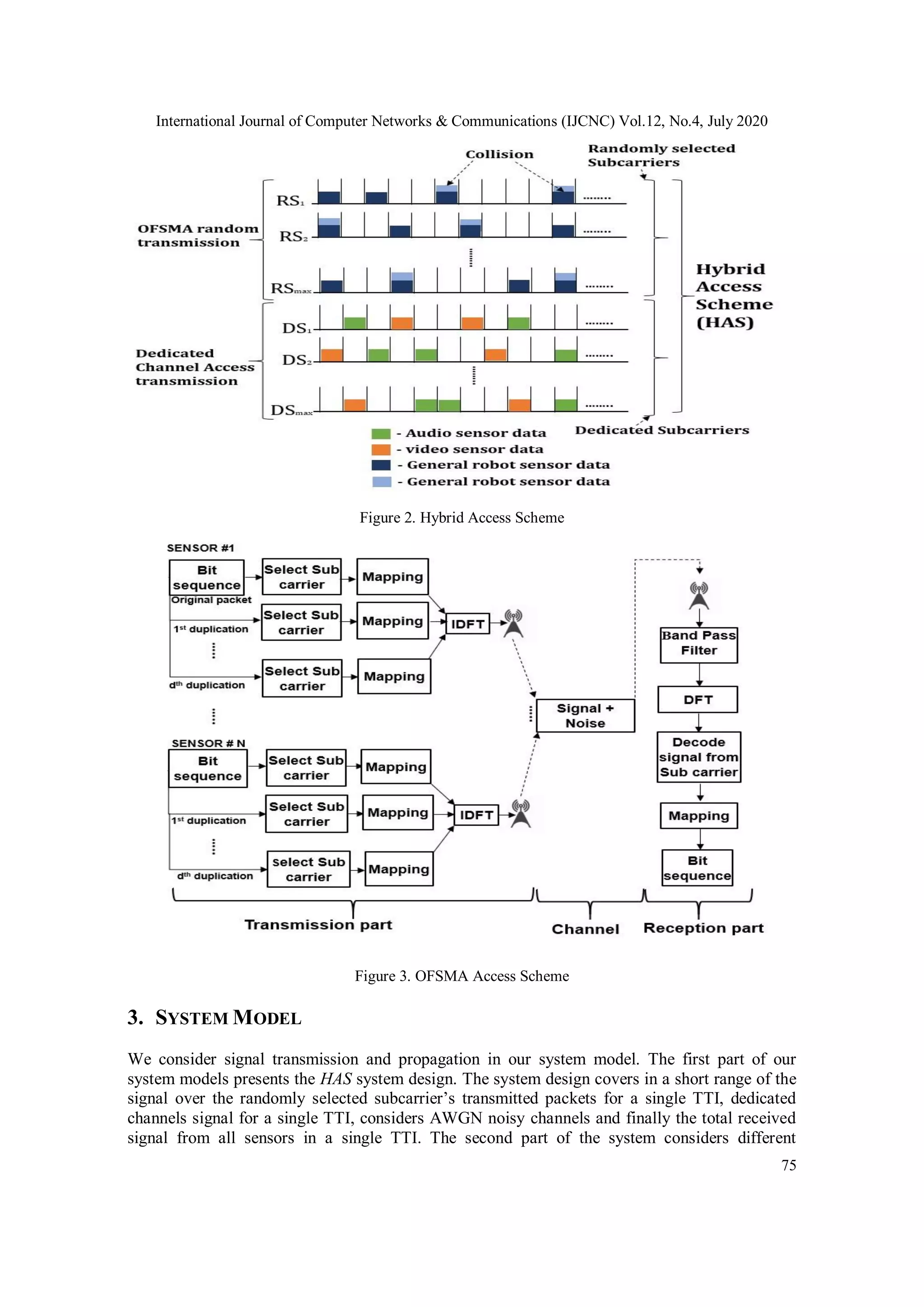
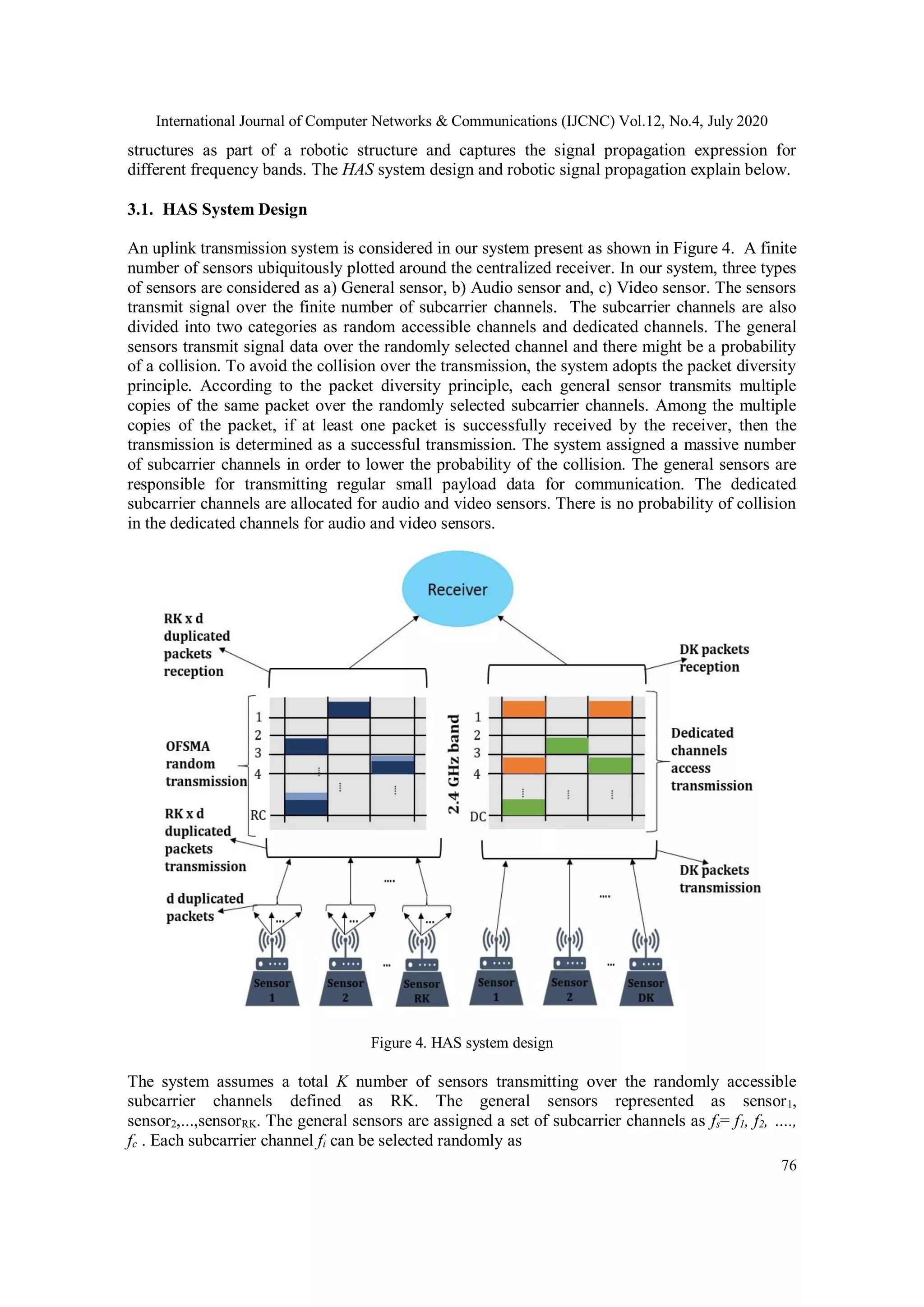
2. HYBRID ACCESS SCHEME
A Hybrid Access Scheme (HAS) is a combination of the Orthogonal Frequency Subcarrier-based
Multiple Access Scheme (OFSMA) [7] and Dedicated Channel Access (DCA) presented in
Figure 2. The general sensors transmit signal based on the OFSMA access scheme over the
randomly selected subcarriers and the audio and video sensors transmit over the dedicated
subcarriers assigned for transmission. The OFSMA access scheme presented in Figure 3. The
OFSMA access scheme adopts a packet diversity principle and transmits multiple copies of the
same packet over a different numbers of subcarrier channels in order to improve the reliability of
the transmission. The system assumed that, there is no internal or self-packet collision among the
transmitted duplicated packets emitted from a sensor for a single specific TTI. According to the
OFSMA scheme, first a packet equivalent bit is created and copied for the number of duplicated
packets. Each duplicated packet bits select an independent orthogonal subcarrier frequency
randomly and perform modulation and mapping for transmission. After performing Inverse First
Fourier Transform (IFFT), the signal of the packet bits is transmitted over Additive White
Gaussian Noise (AWGN) channels to receiver. Due to multiple sensors transmission, there is a
probability of collision, but it is minimized by introducing a massive number of subcarrier
channels. Among the multiple transmission of a single packet, if at least one packet is
successfully received by the receiver then it marked as a success and receiver ignores the other
copies of the same duplicated packets. At the receiver side, uses a band pass filter to detect and
collect the signal frequency. The receiver then started performing the reverse operation and
decoded the signal bits from independent orthogonal subcarrier frequency and retrieve the
original bit sequence. The audio and video sensors transmit packet over the dedicated channel.
Due to the exclusive assignment of the channel, there is no probability of the collision, but a
minor number of packets might be lost due to having low signal power at the receiver end.](https://image.slidesharecdn.com/12420cnc05-200817043713/75/ROBOTIC-INNER-SIGNAL-PROPAGATION-AND-RANDOM-ACCESS-OVER-HYBRID-ACCESS-SCHEME-4-2048.jpg)
![International Journal of Computer Networks & Communications (IJCNC) Vol.12, No.4, July 2020
77
𝑓𝑠
ℝ
← 𝑓𝑖 (1)
Each general sensor transmitting x=1, 2, …, d duplicated packets over the randomly selected
subcarrier channels fi. The d duplicated packet signal sd(t) can be expressed [7] as
𝑆 𝑑( 𝑡) = ∑ 𝑢 𝑥( 𝑡) 𝑒 𝑗2𝜋𝑓 𝑖𝑥 𝑡
𝑑
𝑥=1
where ux(t) is a complex baseband signal for x number of duplicated packets with an in-phase and
quadrature component and fix is the randomly selected frequency fi for x duplicated packets. The
slotted-ALOHA protocol assigns sensors different slot to transmit data packets. For a total of
y=1, 2, …, RK number of general sensors transmit d duplicated equals to RK x d possible packet
can be transmit in a single slot that can be presents as
𝑆 𝑅𝐾( 𝑡) = ∑ ∑ 𝑢 𝑥,𝑦( 𝑡) 𝑒 𝑗2𝜋𝑓 𝑖𝑥 𝑡
𝑑
𝑥=1
𝑅𝐾
𝑦=1
where ux,y(t) is a complex baseband signal for x number of duplicated packets from y number of
sensors having an in-phase and quadrature component. The system also considers a set of audio
and video sensors which transmit audio and video packets over the dedicated channels. For a
single TTI slot, let’s consider a maximum of DK audio or video frames are transmitted over the
dedicated subcarrier channel can be expressed as
𝑆 𝐷𝐾( 𝑡) = ∑ 𝑢( 𝑡) 𝑒 𝑗2𝜋𝑓 𝑚 𝑡
𝐷𝐾
𝑚=1
Where u(t) is a complex baseband signal expression for audio or video frame with an in-phase
and quadrature component, fm is the dedicated subcarrier frequency channel for the frame and t
determines the duration of the frame. So, the total data transmitted in a single slot over the hybrid
access scheme can be represented as
𝑆𝑡𝑜𝑡𝑎𝑙( 𝑡) = 𝑆 𝑅𝐾(𝑡) + 𝑆 𝐷𝐾( 𝑡)
𝑆𝑡𝑜𝑡𝑎𝑙( 𝑡) = ∑ ∑ 𝑢 𝑥,𝑦( 𝑡) 𝑒𝑗2𝜋𝑓𝑖𝑥 𝑡
𝑑
𝑥=1
𝑅𝐾
𝑦=1
+ ∑ 𝑢( 𝑡) 𝑒𝑗2𝜋𝑓 𝑚 𝑡
𝐷𝐾
𝑚=1
Equation (5) presents the signal expression for total transmitted packet by the audio, video and
general sensors in a single transmission slot. The total signal Stotal(t) is transmitted over the
AWGN channel, and noise n(t) ∼CN (0, σ2) is added to the signal. For any single TTI slot, the
received signal rtotal(t) can be defined as
𝑟𝑡𝑜𝑡𝑎𝑙( 𝑡) = ∑ ∑ 𝑢 𝑥,𝑦( 𝑡) 𝑒𝑗2𝜋𝑓𝑖𝑥 𝑡
𝑑
𝑥=1
𝑅𝐾
𝑦=1
+ ∑ 𝑢( 𝑡) 𝑒𝑗2𝜋𝑓 𝑚 𝑡
𝐷𝐾
𝑚=1
+ 𝑛( 𝑡).
(2)
(3)
(4)
(5)
(6)](https://image.slidesharecdn.com/12420cnc05-200817043713/75/ROBOTIC-INNER-SIGNAL-PROPAGATION-AND-RANDOM-ACCESS-OVER-HYBRID-ACCESS-SCHEME-7-2048.jpg)



![International Journal of Computer Networks & Communications (IJCNC) Vol.12, No.4, July 2020
89
REFERENCES
[1] Shimojo, M., Araki, T., Teshigawara, S., Ming, A., & Ishikawa, M. (2007, October). A net-structure
tactile sensor covering free-form surface and ensuring high-speed response. In 2007 IEEE/RSJ
International Conference on Intelligent Robots and Systems (pp. 670-675). IEEE.
[2] Ganjalizadeh, M., Di Marco, P., Kronander, J., Sachs, J., &Petrova, M. (2019, December). Impact of
correlated failures in 5G dual connectivity architectures for URLLC applications. In 2019 IEEE
Globecom Workshops (GC Wkshps) (pp. 1-6). IEEE. [3]3GPP, “5G; Study on Scenarios and
Requirements for Next Generation Access Technologies,” Tech. Rep., 38.913,14.3.0, 2017.
[4] D’Errico, L., Franchi, F., Graziosi, F., Marotta, A., Rinaldi, C., Boschi, M., &Colarieti, A. (2019,
April). Structural Health Monitoring and Earthquake Early Warning on 5G uRLLC Network. In 2019
IEEE 5th World Forum on Internet of Things (WF-IoT) (pp. 783-786). IEEE.
[5] Notay, J. K., & Safdar, G. A. (2011, September). A wireless sensor network based structural health
monitoring system for an airplane. In The 17th International Conference on Automation and
Computing (pp. 240-245). IEEE.
[6] Almarashdeh, I., Alsmadi, M., Hanafy, T., Albahussain, A., Altuwaijri, N., Almaimoni, H., ... & Al
Fraihet, A. (2018). Real-time elderly healthcare monitoring expert system using wireless sensor
network. International Journal of Applied Engineering Research ISSN, 0973-4562.
[7] Ratiu, O., Panagiotopoulos, N., Vos, S., & Puschita, E. (2018, December). Wireless Transmission of
Sensor Data over UWB in Spacecraft Payload Networks. In 2018 6th IEEE International Conference
on Wireless for Space and Extreme Environments (WiSEE) (pp. 131-136). IEEE.
[8] M. A. Hossain, M. Saitou, Z. Pan, J. Liu, and S. Shimamoto. (2020) “Orthogonal Frequency
Subcarrier-based Multiple Random Access in Ultra Reliability and Low Latency Communication,” in
IEEE Consumer Communications Networking Conference, ser. 2nd IEEE Workshop on Cyber-
Physical Networking (CPN’20), In press
[9] Islam, A., Musavian, L., & Thomos, N. (2019, December). Performance Analysis of Vehicular
Optical Camera Communications: Roadmap to uRLLC. In 2019 IEEE Global Communications
Conference (GLOBECOM) (pp. 1-6). IEEE.
[10] Yoshizawa, T., Baskaran, S. B. M., & Kunz, A. (2019, October). Overview of 5G URLLC System
and Security Aspects in 3GPP. In 2019 IEEE Conference on Standards for Communications and
Networking (CSCN) (pp. 1-5). IEEE.
[11] Park, J., Samarakoon, S., Shiri, H., Abdel-Aziz, M. K., Nishio, T., Elgabli, A., & Bennis, M. (2020).
Extreme URLLC: Vision, Challenges, and Key Enablers. arXiv preprint arXiv:2001.09683.
[12] Chang, B., Zhao, G., Chen, Z., Li, P., & Li, L. (2019, December). D2D Transmission Scheme in
URLLC Enabled Real-Time Wireless Control Systems for Tactile Internet. In 2019 IEEE Global
Communications Conference (GLOBECOM) (pp. 1-6). IEEE.
[13] Baratè, A., Haus, G., Ludovico, L. A., Pagani, E., & Scarabottolo, N. (2019). 5G Technology for
Augmented and Virtual Reality in Education. In Proceedings of the International Conference on
Education and New Developments 2019 (END 2019) (pp. 512-516).
[14] Anand, A., De Veciana, G., & Shakkottai, S. (2020). Joint scheduling of URLLC and eMBB traffic in
5G wireless networks. IEEE/ACM Transactions on Networking.
[15] Alsenwi, M., Tran, N. H., Bennis, M., Bairagi, A. K., & Hong, C. S. (2019). eMBB-URLLC resource
slicing: A risk-sensitive approach. IEEE Communications Letters, 23(4), 740-743.
[16] Pan, C., Ren, H., Deng, Y., Elkashlan, M., & Nallanathan, A. (2019). Joint blocklength and location
optimization for URLLC-enabled UAV relay systems. IEEE Communications Letters, 23(3), 498-
501.
[17] Singh, B., Tirkkonen, O., Li, Z., & Uusitalo, M. A. (2017). Contention-based access for ultra-reliable
low latency uplink transmissions. IEEE Wireless Communications Letters, 7(2), 182-185.
[18] Choi, Y. J., Park, S., & Bahk, S. (2006). Multichannel random access in OFDMA wireless
networks. IEEE Journal on Selected Areas in Communications, 24(3), 603-613.
[19] Sen, S., Dorsey, D. J., Guérin, R., & Chiang, M. (2012, October). Analysis of slotted ALOHA with
multipacket messages in clustered surveillance networks. In MILCOM 2012-2012 IEEE Military
Communications Conference (pp. 1-6). IEEE.](https://image.slidesharecdn.com/12420cnc05-200817043713/75/ROBOTIC-INNER-SIGNAL-PROPAGATION-AND-RANDOM-ACCESS-OVER-HYBRID-ACCESS-SCHEME-19-2048.jpg)
![International Journal of Computer Networks & Communications (IJCNC) Vol.12, No.4, July 2020
DOI: 10.5121/ijcnc.2020.12405 71
ROBOTIC INNER SIGNAL PROPAGATION AND
RANDOM ACCESS OVER HYBRID ACCESS SCHEME
Abir Hossain, Zhenni Pan, Megumi Saito, Jiang Liu and Shigeru Shimamoto
Department of Computer Science and Communications Engineering,
Waseda University, Tokyo 169-0072, Japan
ABSTRACT
This paper proposes a Hybrid Access Scheme (HAS) aiming to convert a future robot’s backend
communication system by a finite number of sensors instead of using a lot of wires. To replace this
communication, the HAS needs to assure higher reliability within stringent low latency packet
transmission. In this paper, the HAS utilizes the packet diversity principle and forward multiple copies of
the same packet over the massive number of subcarrier channels. The HAS assigns the random accessing
to select a subcarrier channel for general packet transmitting sensors. The audio and video sensors
transmit packets over the dedicated channels to avoid collisions. The HAS system allows transmitting
audio, video and general sensors simultaneously. The minimum number of subcarriers to satisfy the
URLLC reliability requirement of 99.999% is evaluated for different packet duplications over different
arrival condition.The HAS system’s reliability and collision probability are evaluated in MATLAB
simulator for different packet duplication over different arrival condition. Moreover, the signal
propagation expressions are captured using ANSYS HFSS software for rectangular and circular
transmission medium over the 900 MHz, 2.4 GHz, 24 GHz, and 55 GHz frequency bands for different
structural configurations.
KEYWORDS
Hybrid Access Scheme, Signal Propagation, Random Access, reliability, URLLC
1. INTRODUCTION
In the state-of-the-art technology, wireless sensor converted system is getting more attention day
by day. A wireless sensor converted system being demanded due to its mobility, scalability,
flexibility, cost-efficiency, and faster deployment. However, a robot consists of multiple
elements, and many wires are usually required as the communication backbone among attached
different elements [1]. A wire connected robot gain more weight and consume more power for its
usual movement. Moreover, the maintenance become complex when any internal wires get
disconnected during operation. By increasing the demands of wireless sensor connected system
and to resolve the defined problems, we intend to convert a wire system into a wireless one by a
Hybrid Access Scheme (HAS). A typical wireless sensor connected robot is presented in Figure 1.
As illustrated in Figure 1, there are three types of sensors (Audio, video and general sensor)
deployed ubiquity over the robotic structure and utilize hybrid access scheme to ensure ultra -
reliable low latency communication. The 3GPP sets the standard for Ultra-Reliable Low Latency
Communication (URLLC) reliability requirement for a single packet transmission having size of
32 bytes is 1-10-5
(alternatively 99.999%) with an interface latency of 1ms [2,3]. Due to ensure
this higher reliability and latency, the HAS adopts packet diversity principle and transmits over
massive number of subcarrier channels in almost error-free and interference-free manner.](https://crownmelresort.com/image.slidesharecdn.com/12420cnc05-200817043713/75/ROBOTIC-INNER-SIGNAL-PROPAGATION-AND-RANDOM-ACCESS-OVER-HYBRID-ACCESS-SCHEME-1-2048.jpg)
![International Journal of Computer Networks & Communications (IJCNC) Vol.12, No.4, July 2020
72
Figure 1. Wireless sensor connected robot.
The HAS system assumed to assign a massive number of orthogonal subcarrier channels to
transmit packets from sensor to receiver site. Due to consider small area inside a robotic
structure, we assumed that the assign massive number of channels will not interfere with the
central mobile bandwidth assignment.
1.1. Related works
A several number of research works conducted to convert an established into a wireless system
by a finite number of sensors. Under the 5G communication domain, a sensor communication
based structural health monitoring and early earthquake warning system is presented in [4] that
give a proposal of monitoring and warning generation system in presence of seismic events. A
wireless sensor connected structural health monitoring system proposed for an airplane is studied
in [5] where sensor nodes observing the health conditions of an airplane deployed and covered
the entire area of an aircraft. These nodes evaluate throughput, the data dropped rate and the
delay for a maximum of 7 nodes as approximately 12000 bps, 180 bps, and115ms, respectively.
A real time elderly health care monitoring system is proposed in[6] that utilize a wireless sensor
network where bracelet-type devices are equipped with sensors applied to each patient under the
monitoring system of the healthcare that received data in real time and stored in a central
monitoring server. A spacecraft automation and communication based on sensor is studied in [7],
that transmit 988 B payload of sensor data in UWB in spacecraft networks over the different
frequency bands using a TDMA protocol having a short 5ms time slot. A wireless sensor-
connected robot’s OFSMA MAC protocol is accepted in [8], which considered only a single
frequency band. The main objectives of that proposed work are to determine the minimum
number of channels to satisfy 99.999% reliability and air-interface latency for single-packet
uplink communication.
The URLLC is a challenging service launched by 5G communication due to its higher reliability
requirement and lower latency bound. The URLLC is specially designed to overcome the
mission-critical system [9,10] where the link reliability is highly expected in a strict latency
requirement. The URLLC service is highly demanded and attracts attention a lot of researcher](https://crownmelresort.com/image.slidesharecdn.com/12420cnc05-200817043713/75/ROBOTIC-INNER-SIGNAL-PROPAGATION-AND-RANDOM-ACCESS-OVER-HYBRID-ACCESS-SCHEME-2-2048.jpg)
![International Journal of Computer Networks & Communications (IJCNC) Vol.12, No.4, July 2020
73
due to its exciting and interesting applications. Among the different applications, the URLLC is
applicable in reliable remote action with robots and coordination among vehicles [11], tactile
internet [12], augmented or virtual reality (AR/VR) [13] and many more. This research work
[14] presents an emerging system of URLLC and eMBB where the time is divided into slots and
the time slot is further subdivided into minislots. The URLLC data is overlapped with eMBB
traffic and transmitted over the channel using superposition/puncturing and received successfully
using successive interference cancellation method. The URLLC is sensitive to its latency of the
packet transmission. This research [15] covers URLLC and eMBB resource slicing over minislots
in a risk-sensitive approach considering Conditional Value at Risk (CVaR) by managing properly
both eMBB users scheduling and URLLC slot placement for the downlink communication. An
unmanned aerial vehicle (UAV) based relay system is analyzed in [16] where the data is
transmitted under the URLLC requirements. This research work subjected to optimize the
blocklength allocation and minimize the decoding error probability under the latency
requirement.
There are several random accessing protocols studied in the slotted ALOHA system to
achieve the expected reliability and latency defined in URLLC. A contention-based slotted
ALOHA system has been proposed in [17] that adopts multichannel, multipacket diversity and
transmit multiple copies of the same packets in consecutive slots to improve system reliability,
and to reduce latency to satisfy URLLC’s conditions. Multichannel random accessing using
OFDMA is analyzed in [18], which proposed a fast retrial algorithm to forward a packet into a
frequency diversity system after a collision in a slotted ALOHA system. A multi-packet
messaging system in a cluster-based environment analysed in [19] where the multiple packets
forwarded into different slots and having an independent frequency is to improve the system
throughput.
1.2. Contributions
The existing research work is not suitable to convert our proposed objective to convert a future
robot’s internal communication developed by sensors. To implement our proposed aim, we
propose a hybrid access scheme. The main contributions of the paper are listed below:
We propose a new hybrid access scheme (HAS) for a future robot’s internal communication
system. The HAS scheme ensures the higher packet transmission reliability of the audio,
video, and randomly transmitted general sensors over the differently allocated subcarrier
channels.
We introduce a system model to represent the hybrid access scheme’s total transmitted
packet signal for a single Transmission Time Interval (TTI) slot, introduced AWGN noise
into the channel and finally the received packet signal at the receiver site.
We determine the minimum number of subcarriers required to satisfy the reliability of
99.999% defined by URLLC for different packet duplication over variable arrival
conditions.
We evaluate the HAS system’s packet transmission reliability and collision probability for
fixed channel conditions by assigning sensor and subcarrier channel ratio as 1:1 with the
variation of different packet duplications and low to higher arrival conditions.](https://crownmelresort.com/image.slidesharecdn.com/12420cnc05-200817043713/75/ROBOTIC-INNER-SIGNAL-PROPAGATION-AND-RANDOM-ACCESS-OVER-HYBRID-ACCESS-SCHEME-3-2048.jpg)
![International Journal of Computer Networks & Communications (IJCNC) Vol.12, No.4, July 2020
74
We capture the signal propagation expression for rectangular and circular transmission
medium as part of a robotic body structure for different structural configurations over
diverse frequency bands and determine the success or failure transmission for various
structural configurations.
The rest of this paper is organized as follows: Section 2 explains the details of the hybrid access
scheme. In Section 3 represents the system model of the hybrid access scheme, presents the
signal expression of the transmitted and received signals. Moreover, in section 3 presents a
detailed explanation about the structure and properties of the rectangular and circular
transmission medium. The simulation results are presented in Section 4. Finally, this paper is
summarized in Section 5.
2. HYBRID ACCESS SCHEME
A Hybrid Access Scheme (HAS) is a combination of the Orthogonal Frequency Subcarrier-based
Multiple Access Scheme (OFSMA) [7] and Dedicated Channel Access (DCA) presented in
Figure 2. The general sensors transmit signal based on the OFSMA access scheme over the
randomly selected subcarriers and the audio and video sensors transmit over the dedicated
subcarriers assigned for transmission. The OFSMA access scheme presented in Figure 3. The
OFSMA access scheme adopts a packet diversity principle and transmits multiple copies of the
same packet over a different numbers of subcarrier channels in order to improve the reliability of
the transmission. The system assumed that, there is no internal or self-packet collision among the
transmitted duplicated packets emitted from a sensor for a single specific TTI. According to the
OFSMA scheme, first a packet equivalent bit is created and copied for the number of duplicated
packets. Each duplicated packet bits select an independent orthogonal subcarrier frequency
randomly and perform modulation and mapping for transmission. After performing Inverse First
Fourier Transform (IFFT), the signal of the packet bits is transmitted over Additive White
Gaussian Noise (AWGN) channels to receiver. Due to multiple sensors transmission, there is a
probability of collision, but it is minimized by introducing a massive number of subcarrier
channels. Among the multiple transmission of a single packet, if at least one packet is
successfully received by the receiver then it marked as a success and receiver ignores the other
copies of the same duplicated packets. At the receiver side, uses a band pass filter to detect and
collect the signal frequency. The receiver then started performing the reverse operation and
decoded the signal bits from independent orthogonal subcarrier frequency and retrieve the
original bit sequence. The audio and video sensors transmit packet over the dedicated channel.
Due to the exclusive assignment of the channel, there is no probability of the collision, but a
minor number of packets might be lost due to having low signal power at the receiver end.](https://crownmelresort.com/image.slidesharecdn.com/12420cnc05-200817043713/75/ROBOTIC-INNER-SIGNAL-PROPAGATION-AND-RANDOM-ACCESS-OVER-HYBRID-ACCESS-SCHEME-4-2048.jpg)


![International Journal of Computer Networks & Communications (IJCNC) Vol.12, No.4, July 2020
77
𝑓𝑠
ℝ
← 𝑓𝑖 (1)
Each general sensor transmitting x=1, 2, …, d duplicated packets over the randomly selected
subcarrier channels fi. The d duplicated packet signal sd(t) can be expressed [7] as
𝑆 𝑑( 𝑡) = ∑ 𝑢 𝑥( 𝑡) 𝑒 𝑗2𝜋𝑓 𝑖𝑥 𝑡
𝑑
𝑥=1
where ux(t) is a complex baseband signal for x number of duplicated packets with an in-phase and
quadrature component and fix is the randomly selected frequency fi for x duplicated packets. The
slotted-ALOHA protocol assigns sensors different slot to transmit data packets. For a total of
y=1, 2, …, RK number of general sensors transmit d duplicated equals to RK x d possible packet
can be transmit in a single slot that can be presents as
𝑆 𝑅𝐾( 𝑡) = ∑ ∑ 𝑢 𝑥,𝑦( 𝑡) 𝑒 𝑗2𝜋𝑓 𝑖𝑥 𝑡
𝑑
𝑥=1
𝑅𝐾
𝑦=1
where ux,y(t) is a complex baseband signal for x number of duplicated packets from y number of
sensors having an in-phase and quadrature component. The system also considers a set of audio
and video sensors which transmit audio and video packets over the dedicated channels. For a
single TTI slot, let’s consider a maximum of DK audio or video frames are transmitted over the
dedicated subcarrier channel can be expressed as
𝑆 𝐷𝐾( 𝑡) = ∑ 𝑢( 𝑡) 𝑒 𝑗2𝜋𝑓 𝑚 𝑡
𝐷𝐾
𝑚=1
Where u(t) is a complex baseband signal expression for audio or video frame with an in-phase
and quadrature component, fm is the dedicated subcarrier frequency channel for the frame and t
determines the duration of the frame. So, the total data transmitted in a single slot over the hybrid
access scheme can be represented as
𝑆𝑡𝑜𝑡𝑎𝑙( 𝑡) = 𝑆 𝑅𝐾(𝑡) + 𝑆 𝐷𝐾( 𝑡)
𝑆𝑡𝑜𝑡𝑎𝑙( 𝑡) = ∑ ∑ 𝑢 𝑥,𝑦( 𝑡) 𝑒𝑗2𝜋𝑓𝑖𝑥 𝑡
𝑑
𝑥=1
𝑅𝐾
𝑦=1
+ ∑ 𝑢( 𝑡) 𝑒𝑗2𝜋𝑓 𝑚 𝑡
𝐷𝐾
𝑚=1
Equation (5) presents the signal expression for total transmitted packet by the audio, video and
general sensors in a single transmission slot. The total signal Stotal(t) is transmitted over the
AWGN channel, and noise n(t) ∼CN (0, σ2) is added to the signal. For any single TTI slot, the
received signal rtotal(t) can be defined as
𝑟𝑡𝑜𝑡𝑎𝑙( 𝑡) = ∑ ∑ 𝑢 𝑥,𝑦( 𝑡) 𝑒𝑗2𝜋𝑓𝑖𝑥 𝑡
𝑑
𝑥=1
𝑅𝐾
𝑦=1
+ ∑ 𝑢( 𝑡) 𝑒𝑗2𝜋𝑓 𝑚 𝑡
𝐷𝐾
𝑚=1
+ 𝑛( 𝑡).
(2)
(3)
(4)
(5)
(6)](https://crownmelresort.com/image.slidesharecdn.com/12420cnc05-200817043713/75/ROBOTIC-INNER-SIGNAL-PROPAGATION-AND-RANDOM-ACCESS-OVER-HYBRID-ACCESS-SCHEME-7-2048.jpg)











![International Journal of Computer Networks & Communications (IJCNC) Vol.12, No.4, July 2020
89
REFERENCES
[1] Shimojo, M., Araki, T., Teshigawara, S., Ming, A., & Ishikawa, M. (2007, October). A net-structure
tactile sensor covering free-form surface and ensuring high-speed response. In 2007 IEEE/RSJ
International Conference on Intelligent Robots and Systems (pp. 670-675). IEEE.
[2] Ganjalizadeh, M., Di Marco, P., Kronander, J., Sachs, J., &Petrova, M. (2019, December). Impact of
correlated failures in 5G dual connectivity architectures for URLLC applications. In 2019 IEEE
Globecom Workshops (GC Wkshps) (pp. 1-6). IEEE. [3]3GPP, “5G; Study on Scenarios and
Requirements for Next Generation Access Technologies,” Tech. Rep., 38.913,14.3.0, 2017.
[4] D’Errico, L., Franchi, F., Graziosi, F., Marotta, A., Rinaldi, C., Boschi, M., &Colarieti, A. (2019,
April). Structural Health Monitoring and Earthquake Early Warning on 5G uRLLC Network. In 2019
IEEE 5th World Forum on Internet of Things (WF-IoT) (pp. 783-786). IEEE.
[5] Notay, J. K., & Safdar, G. A. (2011, September). A wireless sensor network based structural health
monitoring system for an airplane. In The 17th International Conference on Automation and
Computing (pp. 240-245). IEEE.
[6] Almarashdeh, I., Alsmadi, M., Hanafy, T., Albahussain, A., Altuwaijri, N., Almaimoni, H., ... & Al
Fraihet, A. (2018). Real-time elderly healthcare monitoring expert system using wireless sensor
network. International Journal of Applied Engineering Research ISSN, 0973-4562.
[7] Ratiu, O., Panagiotopoulos, N., Vos, S., & Puschita, E. (2018, December). Wireless Transmission of
Sensor Data over UWB in Spacecraft Payload Networks. In 2018 6th IEEE International Conference
on Wireless for Space and Extreme Environments (WiSEE) (pp. 131-136). IEEE.
[8] M. A. Hossain, M. Saitou, Z. Pan, J. Liu, and S. Shimamoto. (2020) “Orthogonal Frequency
Subcarrier-based Multiple Random Access in Ultra Reliability and Low Latency Communication,” in
IEEE Consumer Communications Networking Conference, ser. 2nd IEEE Workshop on Cyber-
Physical Networking (CPN’20), In press
[9] Islam, A., Musavian, L., & Thomos, N. (2019, December). Performance Analysis of Vehicular
Optical Camera Communications: Roadmap to uRLLC. In 2019 IEEE Global Communications
Conference (GLOBECOM) (pp. 1-6). IEEE.
[10] Yoshizawa, T., Baskaran, S. B. M., & Kunz, A. (2019, October). Overview of 5G URLLC System
and Security Aspects in 3GPP. In 2019 IEEE Conference on Standards for Communications and
Networking (CSCN) (pp. 1-5). IEEE.
[11] Park, J., Samarakoon, S., Shiri, H., Abdel-Aziz, M. K., Nishio, T., Elgabli, A., & Bennis, M. (2020).
Extreme URLLC: Vision, Challenges, and Key Enablers. arXiv preprint arXiv:2001.09683.
[12] Chang, B., Zhao, G., Chen, Z., Li, P., & Li, L. (2019, December). D2D Transmission Scheme in
URLLC Enabled Real-Time Wireless Control Systems for Tactile Internet. In 2019 IEEE Global
Communications Conference (GLOBECOM) (pp. 1-6). IEEE.
[13] Baratè, A., Haus, G., Ludovico, L. A., Pagani, E., & Scarabottolo, N. (2019). 5G Technology for
Augmented and Virtual Reality in Education. In Proceedings of the International Conference on
Education and New Developments 2019 (END 2019) (pp. 512-516).
[14] Anand, A., De Veciana, G., & Shakkottai, S. (2020). Joint scheduling of URLLC and eMBB traffic in
5G wireless networks. IEEE/ACM Transactions on Networking.
[15] Alsenwi, M., Tran, N. H., Bennis, M., Bairagi, A. K., & Hong, C. S. (2019). eMBB-URLLC resource
slicing: A risk-sensitive approach. IEEE Communications Letters, 23(4), 740-743.
[16] Pan, C., Ren, H., Deng, Y., Elkashlan, M., & Nallanathan, A. (2019). Joint blocklength and location
optimization for URLLC-enabled UAV relay systems. IEEE Communications Letters, 23(3), 498-
501.
[17] Singh, B., Tirkkonen, O., Li, Z., & Uusitalo, M. A. (2017). Contention-based access for ultra-reliable
low latency uplink transmissions. IEEE Wireless Communications Letters, 7(2), 182-185.
[18] Choi, Y. J., Park, S., & Bahk, S. (2006). Multichannel random access in OFDMA wireless
networks. IEEE Journal on Selected Areas in Communications, 24(3), 603-613.
[19] Sen, S., Dorsey, D. J., Guérin, R., & Chiang, M. (2012, October). Analysis of slotted ALOHA with
multipacket messages in clustered surveillance networks. In MILCOM 2012-2012 IEEE Military
Communications Conference (pp. 1-6). IEEE.](https://crownmelresort.com/image.slidesharecdn.com/12420cnc05-200817043713/75/ROBOTIC-INNER-SIGNAL-PROPAGATION-AND-RANDOM-ACCESS-OVER-HYBRID-ACCESS-SCHEME-19-2048.jpg)





































































![ANPARA THERMAL POWER STATION[1] sangam.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/anparathermalpowerstation1sangam-251121115219-9261cde4-thumbnail.jpg?width=640&height=640&fit=bounds)












