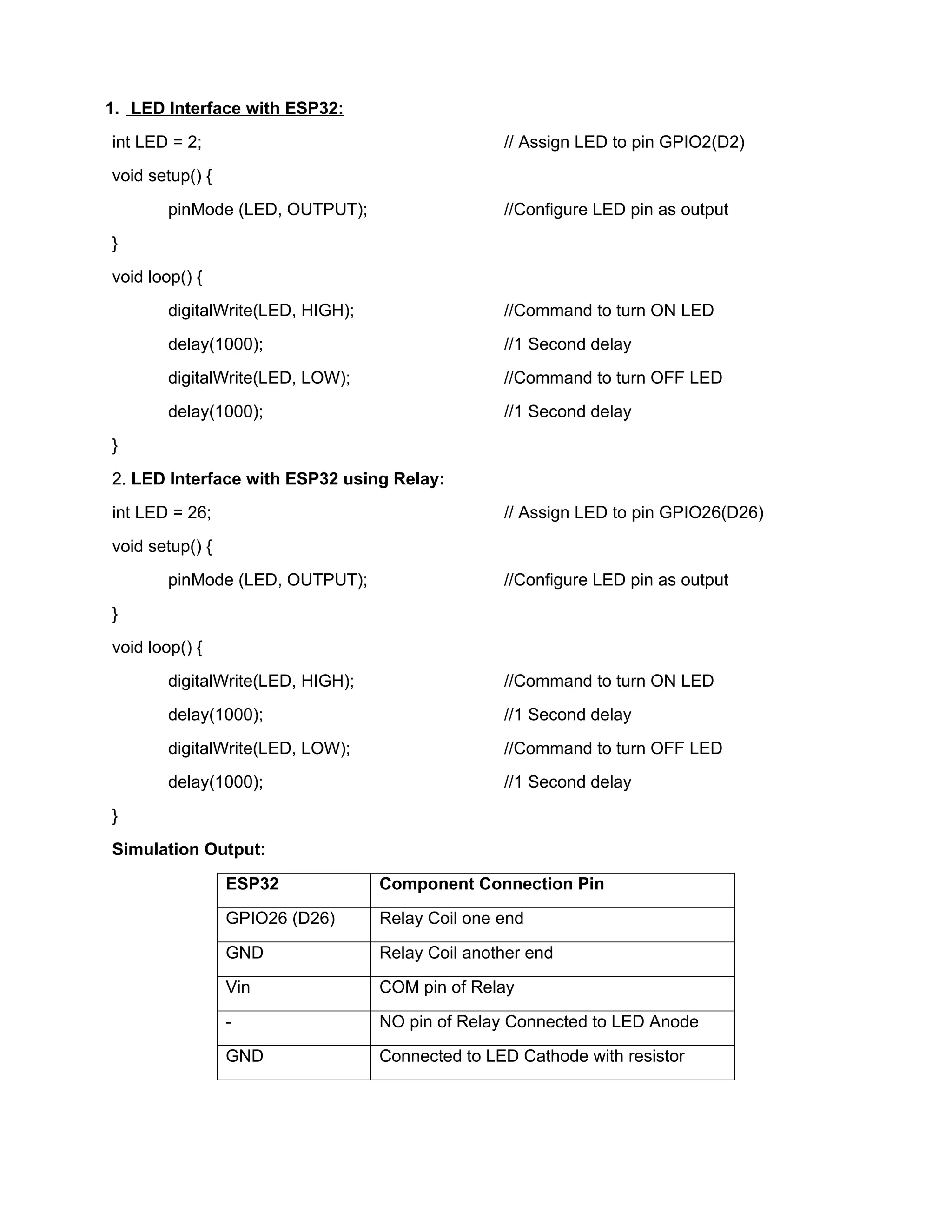
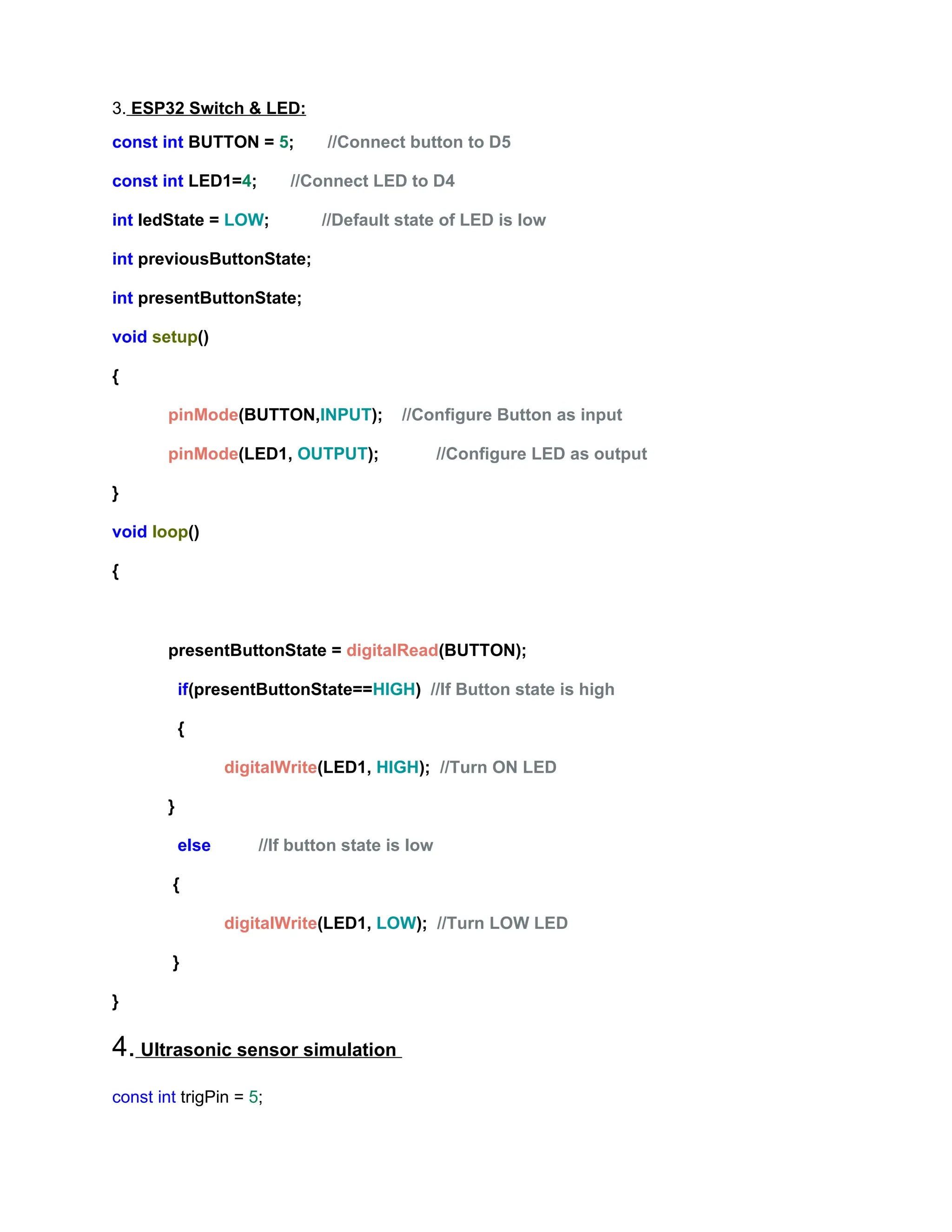
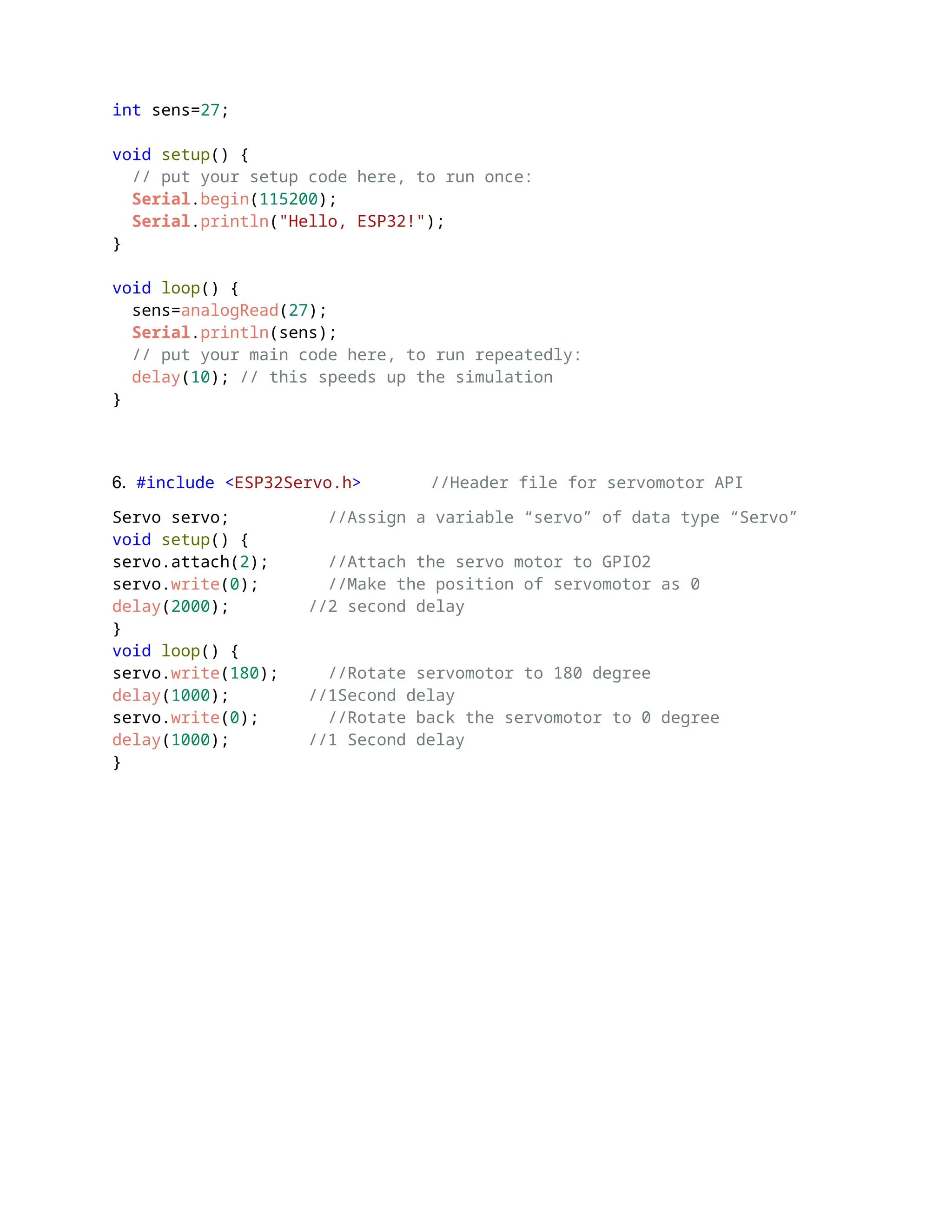
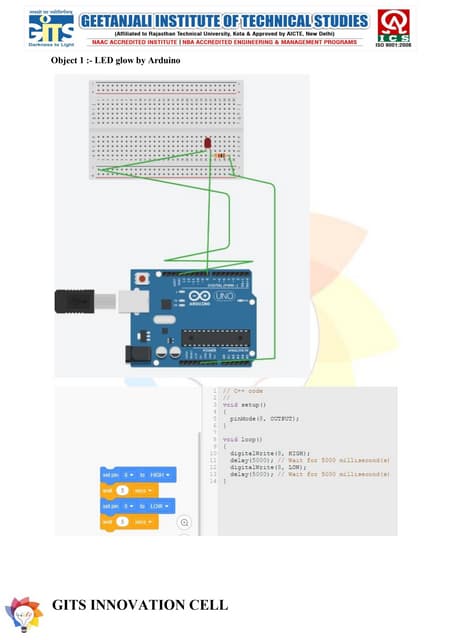
The document outlines various interfacing methods with the ESP32 microcontroller, including controlling LEDs directly and via relays, using buttons to operate LEDs, and utilizing an ultrasonic sensor for distance measurement. It also includes code for reading light sensor values through an LDR and controlling a servo motor's position. Each section provides sample code snippets and configuration details for setting up hardware components.