This document describes a project to design an obstacle detection algorithm for robotics using an infrared sensor system. A team of 5 students developed an embedded C program for an intelligent robot that can detect and avoid obstacles using 3 infrared sensors and an AT89S52 microcontroller. The robot is able to navigate collision-free using this multi-sensor integration technique. The hardware components include infrared sensors, a motor driver IC, DC motors, an LCD, and a comparator. The software was developed using Kiel compiler and embedded C language. The robot is able to safely reach its goal in an unknown environment by overcoming obstacles without human guidance.
In this document
Powered by AI
Introduction of the project about obstacle detection in robotics and listing team members.
Developed an intelligent robot using IR sensors for obstacle avoidance in unknown environments.
Essential hardware components needed include IR sensors, microcontrollers, and motor drivers.
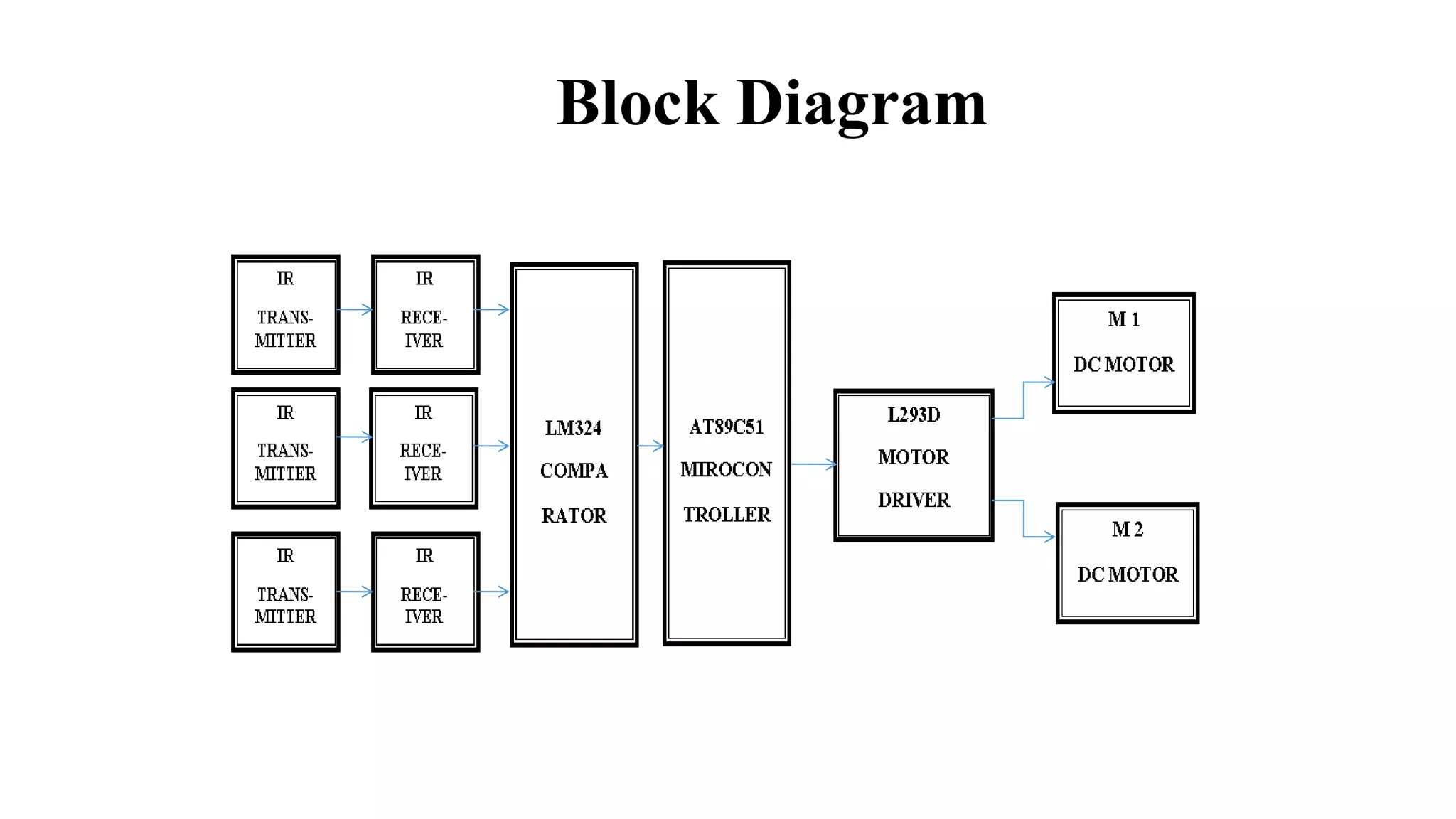
Block and pin diagrams necessary for understanding the connections within the hardware.
Specifications of the AT89S52 microcontroller, including memory and interrupt capabilities.
Functionality of IR sensors in detecting obstacles by reflecting infrared radiation.
Description of DC motor characteristics, benefits in robotics, and speed control methods.
Functionality of the L293D IC, which allows control of DC motors in two directions.
Function of LCDs in displaying information, including character dimensions and power supply.
Overview of the LM324 as a versatile comparator chip used in various applications.
Information about Keil as a cross-compiler for programming embedded systems.
Explanation of embedded C programming and its conversion to machine language.
Key advantages like automatic obstacle avoidance, ease of programming, and cost-effectiveness.
A variety of applications for the obstacle detection system in different robotic domains.
Summary of the project outcomes, benefits of using IR sensors, and overall system effectiveness.
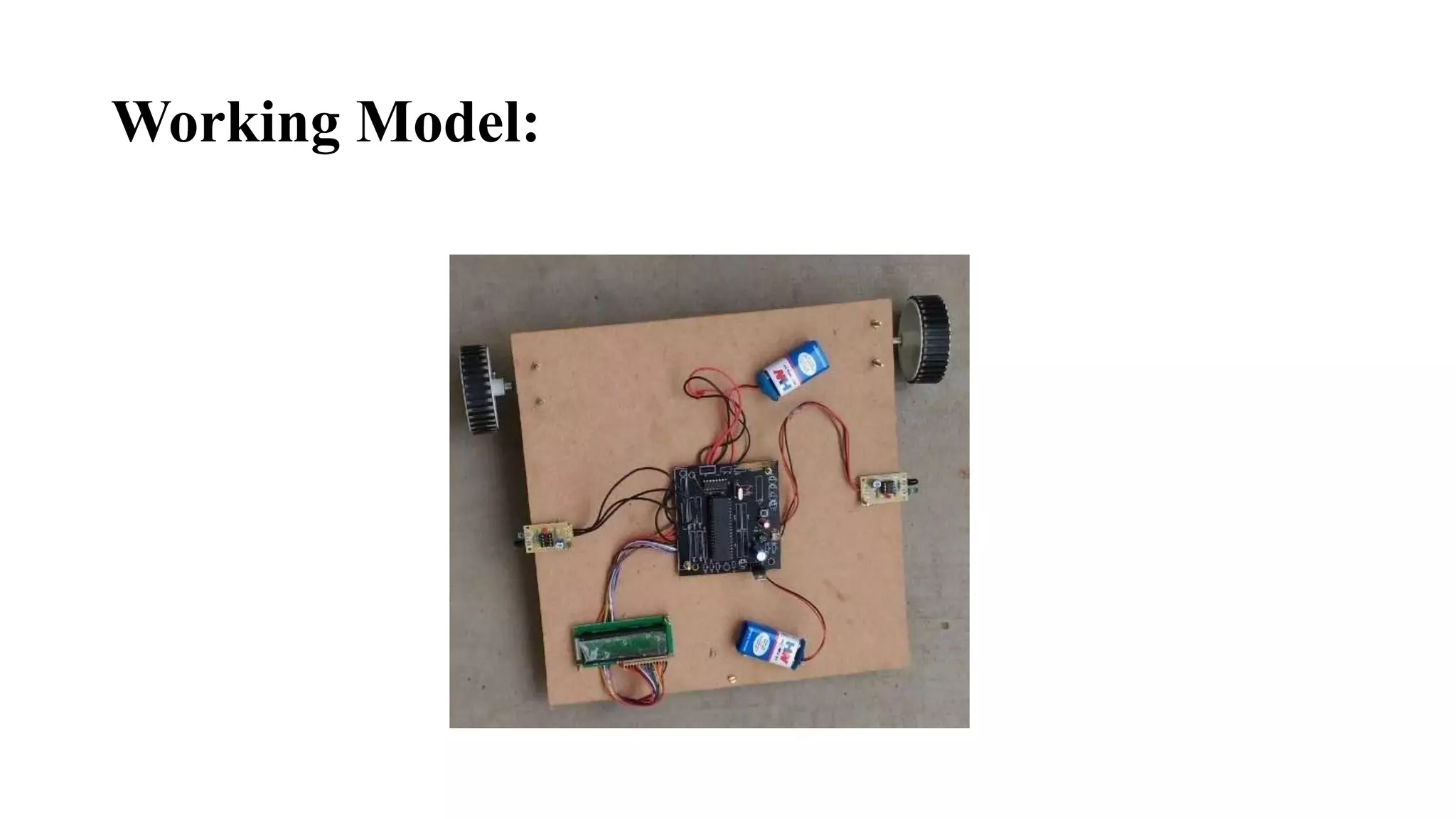
Brief mention of a working model demonstrating the project functionality.
Suggestions for future improvements including ultrasonic sensors and enhanced functionalities.
Design And ImplementationOf Obstacle
Detection Algorithm In Robotics
Team Members
V.MANIKANTA TAMMI RAJU (126Q1A04D2)
P.MALLI BABU (126Q1A04D5)
J.SIVANAGESWAR RAO (126Q1A04D4)
M.NOOKA RAJU (126Q1A04G4)
S.RANGAYYA NAIDU (126Q1A04E3)
Under The Guidance Of
Ms. N.Archana
2.
Content :
• Abstract
•Hardware Components
• Software Components
• Block Diagram
• Pin Diagram Of AT89S52
• Features Of AT89S52
• IR Sensor
• DC Motor
• L293D-Motor Driver IC
• LCD
• LM324
• Kiel Software
• Embedded C
• Advantages
• Applications
• Conclusion
• Working Model
• Future Aspects.
3.
Abstract
Robotics industry hasreplaced human efforts gradually in performing rather difficult tasks. A very
pertinent aspect of an intelligent security robot is to reach the goal safely by avoiding unknown
obstacles in an unknown environment. In this paper we have developed an embedded C program
code to design an intelligent robot which can overcome the obstacles coming in its way. We have
made use of three infrared sensors to detect the obstacles via the infrared communication technique.
The infrared transmitter sends out infrared radiation in a direction which consequently bounces back
on coming across the surface of an object and thereafter is picked up by the infrared receiver. Authors
have applied a multi sensor integration technique to sense the obstacles using an LED based infrared
transmitter and receiver module integrated with the 8051 micro controller which permits collision
free navigation of robots.
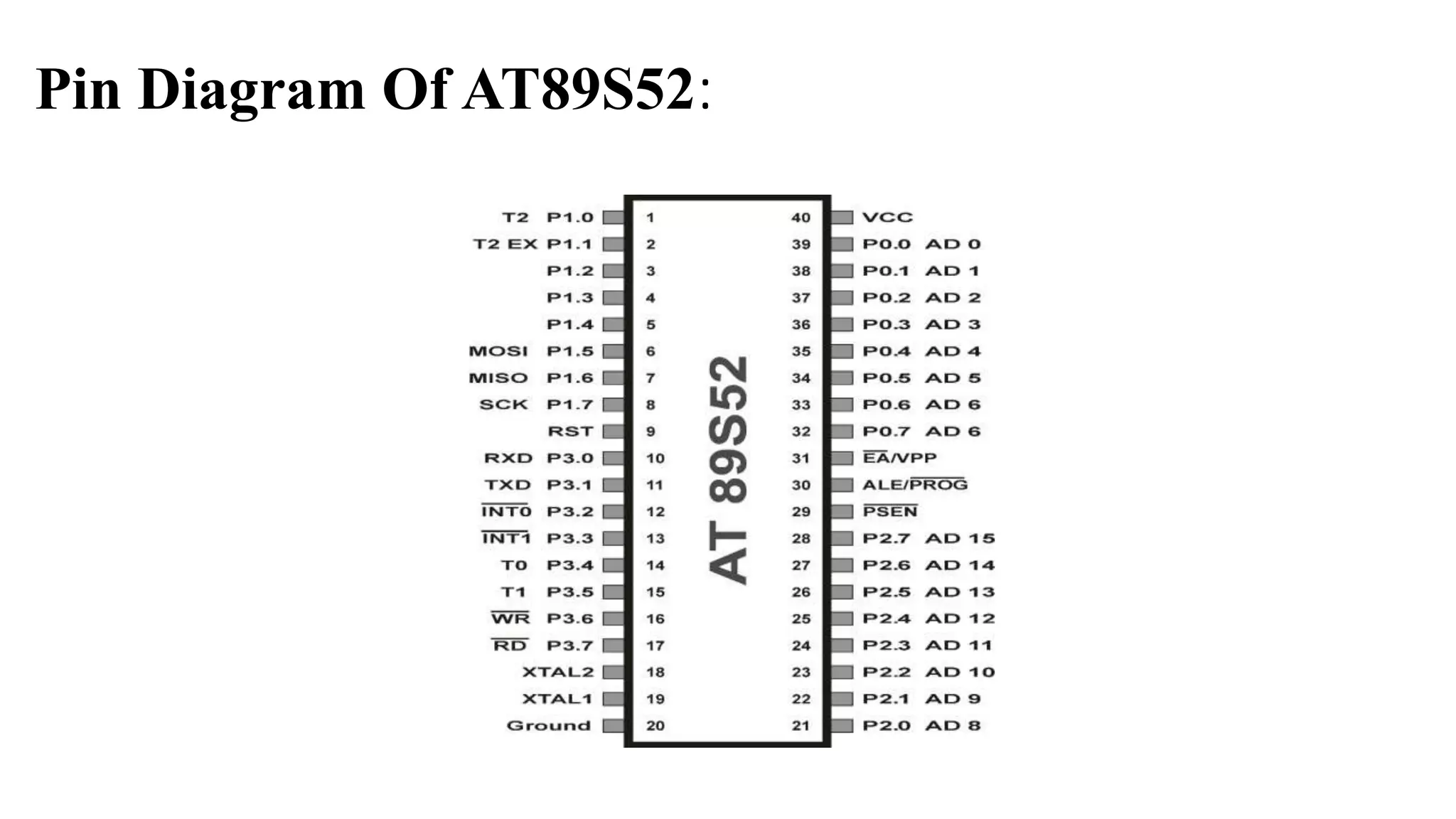
Features of AT89S52:
•4 KB on chip program memory.
• 128 bytes on chip data memory(RAM)
• 4 register banks.
• 128 user defined software flags.
• 8-bit data bus
• 16-bit address bus
• 16 bit timers (usually 2, but may have more, or less).
• 3 internal and 2 external interrupts.
• Bit as well as byte addressable RAM area of 16 bytes.
• Four 8-bit ports, (short models have two 8-bit ports).
• 16-bit program counter and data pointer.
• 1 Microsecond instruction cycle with 12 MHz Crystal.
9.
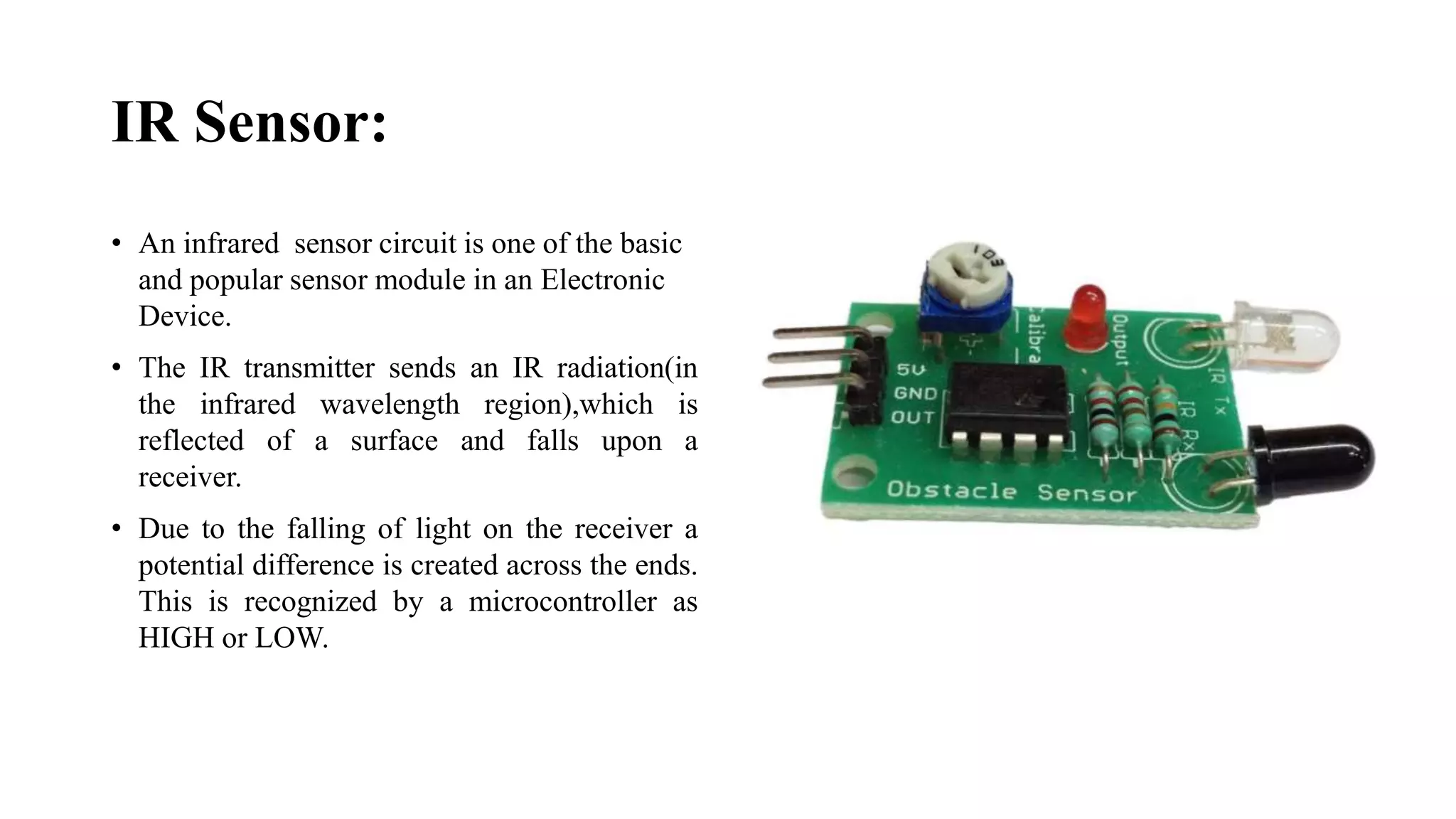
IR Sensor:
• Aninfrared sensor circuit is one of the basic
and popular sensor module in an Electronic
Device.
• The IR transmitter sends an IR radiation(in
the infrared wavelength region),which is
reflected of a surface and falls upon a
receiver.
• Due to the falling of light on the receiver a
potential difference is created across the ends.
This is recognized by a microcontroller as
HIGH or LOW.
10.
DC Motor:
• DCmotors are widely used in robotics because of their
small size and high energy output.
• A DC Motor is any of a class of electrical machines that
converts direct current electrical power into mechanical
power.
• A DC motor's speed can be controlled over a wide range,
using either a variable supply voltage or by changing the
strength of current in its field windings.
11.
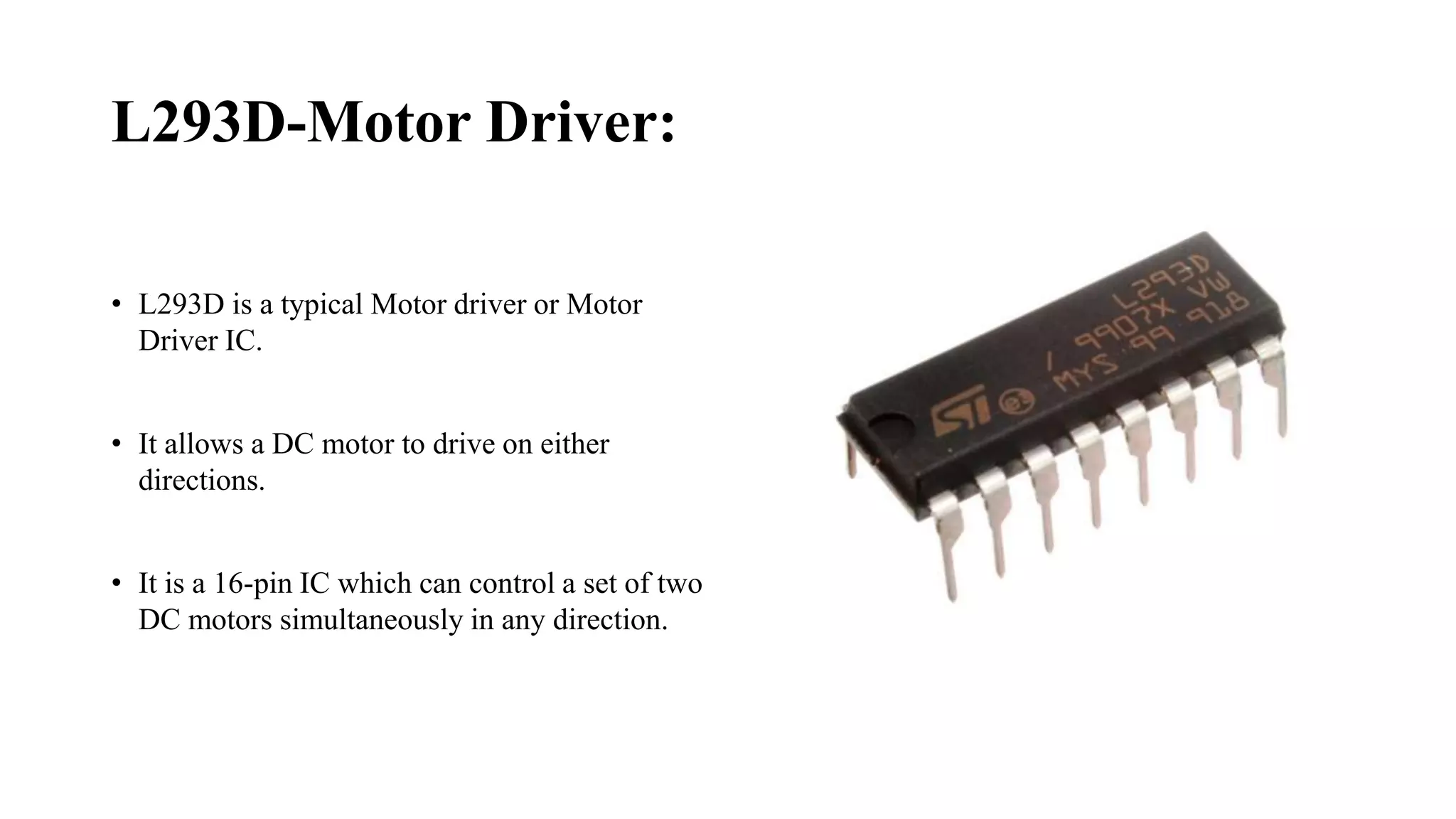
L293D-Motor Driver:
• L293Dis a typical Motor driver or Motor
Driver IC.
• It allows a DC motor to drive on either
directions.
• It is a 16-pin IC which can control a set of two
DC motors simultaneously in any direction.
12.
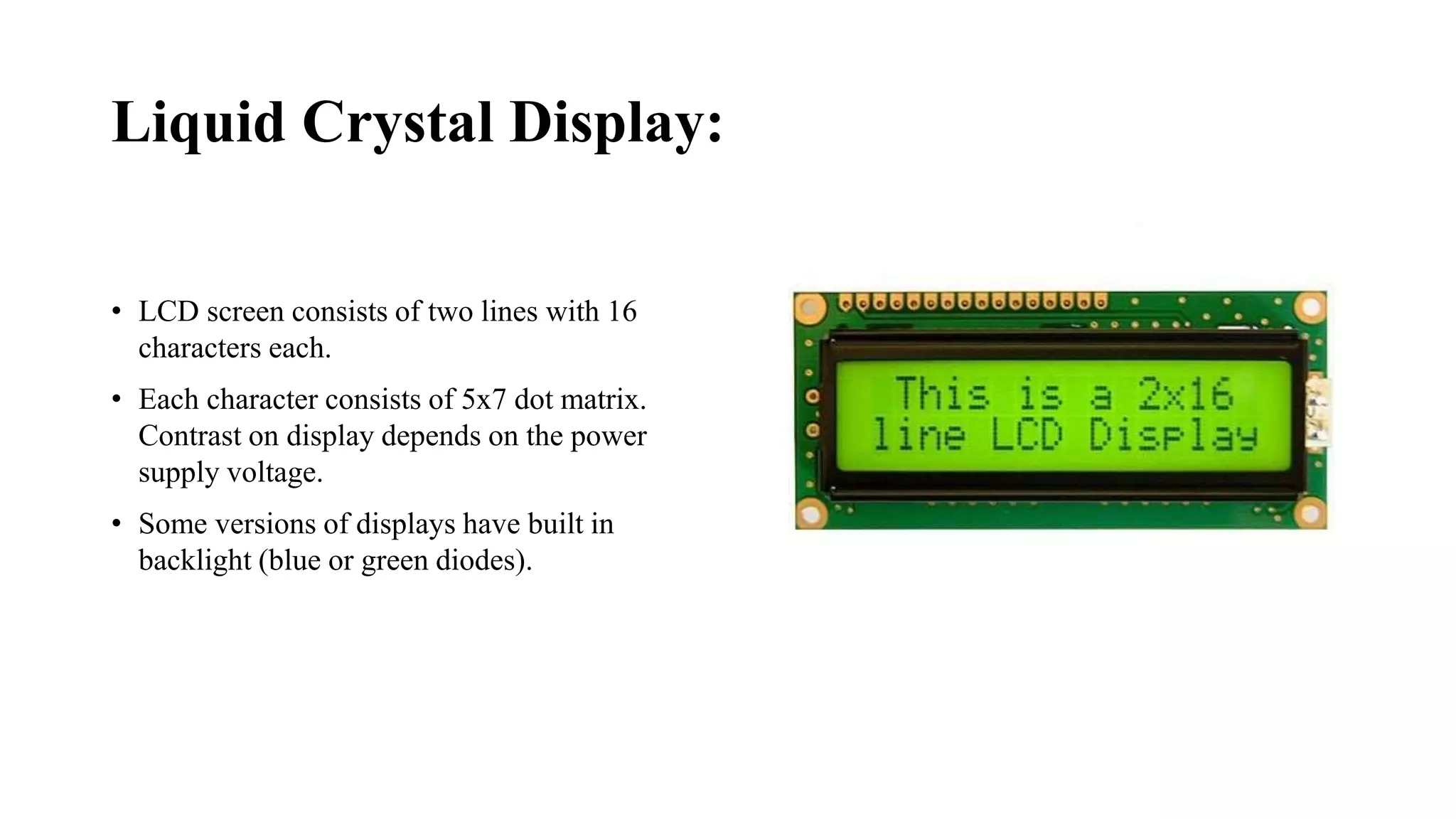
Liquid Crystal Display:
•LCD screen consists of two lines with 16
characters each.
• Each character consists of 5x7 dot matrix.
Contrast on display depends on the power
supply voltage.
• Some versions of displays have built in
backlight (blue or green diodes).
13.
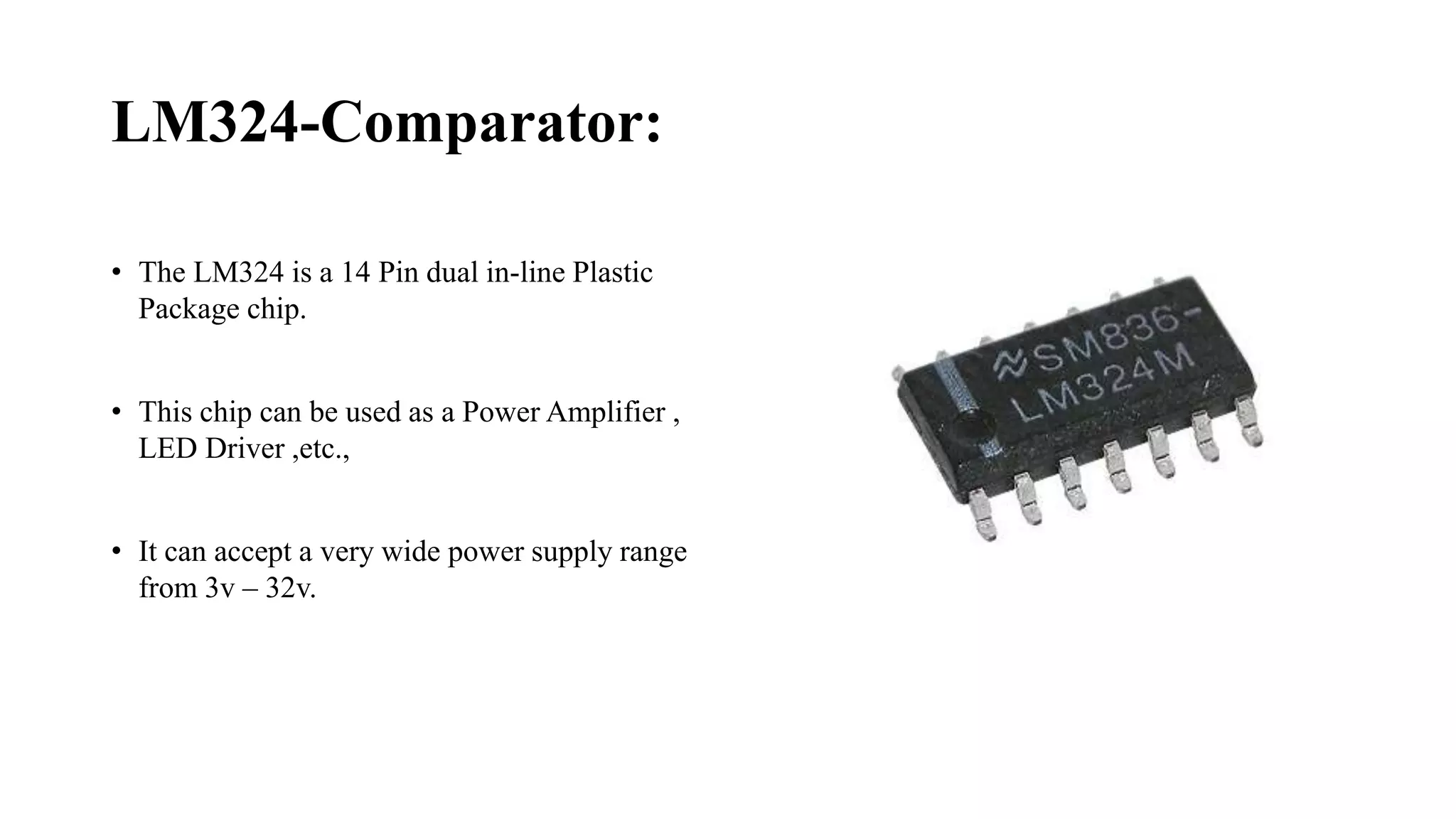
LM324-Comparator:
• The LM324is a 14 Pin dual in-line Plastic
Package chip.
• This chip can be used as a Power Amplifier ,
LED Driver ,etc.,
• It can accept a very wide power supply range
from 3v – 32v.
14.
Keil Software:
• Keilis a cross compiler.
• A cross compiler is similar to the compilers
but we write a program for the target
processor (like 8051 and its derivatives) on
the host processors (like computer of x86)
15.
Embedded C:
• Wheneverthe conventional ‘C’
language and its extensions are used
for programming embedded systems,
it is referred to as “Embedded C”
programming.
• A software program called ‘Cross
compiler’ is used for the conversion of
programs written in Embedded ‘C’ to
target processor/controller specific
instructions(machine language).
16.
Advantages :
• Wheneverrobot senses any obstacle automatically diverts its
position to left or right and follows the path without human
guidance.
• The programming of the microcontroller is easy.
• It is a low cost circuit.
17.
Applications :
• ObstacleDetection for a Mining Vehicle
• Driverless vehicles running along beams
• Obstacle detecting system for a motor vehicle
• Autonomous cleaning robot
18.
CONCLUSION:
We Have Implementedan ISR (Intelligent Security Robot),a self thinking robot which
skillfully makes its way through the obstacles approaching its way using programmed brain without any
guidance from human beings. We have used AT89S52 IC which avoids the requirement of any peripheral
memory devices, occupying less space and easy programming, thus overcoming the limitations of a
microprocessor. The authors have typically selected IR sensors instead of ultrasonic sensor as they use
narrow beam width and are unaffected by sound absorbing materials. We have also taken care of use of
variable range of speed and power utilization for the functioning of the robot by using dc motor instead of
AC motor. The components used for designing an ISR are cost effective, thus making it acceptable.
FUTURE ASPECTS:
• Wecan extend this project with Ultra Sonic Sensor For Distance
Measurement.
• This robot can be used for pick and place the required object by giving
directions to the robot but IR pair should be replaced depending upon
the application.
• By doing extra things, it can be use in Army application.





























![ppt on IC [Integrated Circuit]](https://cdn.slidesharecdn.com/ss_thumbnails/1-171227170055-thumbnail.jpg?width=640&height=640&fit=bounds)