The document describes algorithms for scan converting primitive geometric objects like lines, circles, and ellipses. It explains Bresenham's line algorithm which uses integer arithmetic to efficiently determine the pixel locations along a line path, getting closer to the actual line than the traditional Digital Differential Analyzer (DDA) algorithm. It also covers the midpoint circle algorithm which uses distance comparison to test the midpoint between pixels to decide if it is inside or outside the circle boundary during scan conversion.
In this document
Powered by AI
Output primitives are basic geometric structures like points and lines. Scan conversion helps in locating pixels by setting intensity codes in graphic memory.
Understanding slope calculations for line drawing with different sampling intervals for both positive and negative slopes.
Steps outline the line segment drawing process including endpoint coordinates, pixel increments, and stopping conditions.
Bresenham's Algorithm efficiently determines pixel positions along a line path, using decision parameters based on slopes.
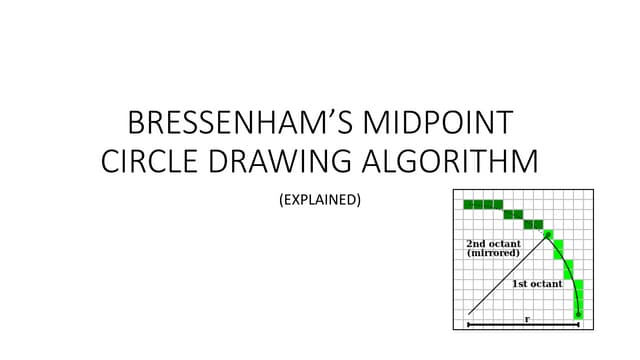
The Midpoint Circle Algorithm tests midpoints between pixels to determine positions for circle drawing, ensuring symmetry in octants.
Bresenham's Circle Algorithm calculates pixel positions for circles, using decision parameters and translating points to defined center.
Differences between DDA and Bresenham's algorithms; DDA uses floating point calculations, while Bresenham's is more accurate with integers.
Output primitivesare the basic geometric
structures which facilitate or describe a
scene/picture.
Example of these include:
points, lines, curves (circles, conics etc),
surfaces, fill colour, character string etc.
3.
In order todraw the primitive objects, one has to
first scan convert the object.
Scan convert: Refers to the operation of finding
out the location of pixels and then setting the
values of corresponding bits, in the graphic
memory, to the desired intensity code.
5.
y means that for a unit (1) change in x
m
x there is
m-change in y.
x 1 means that for a unit (1) change in y
y m there is
1/m change in x.
5
6.
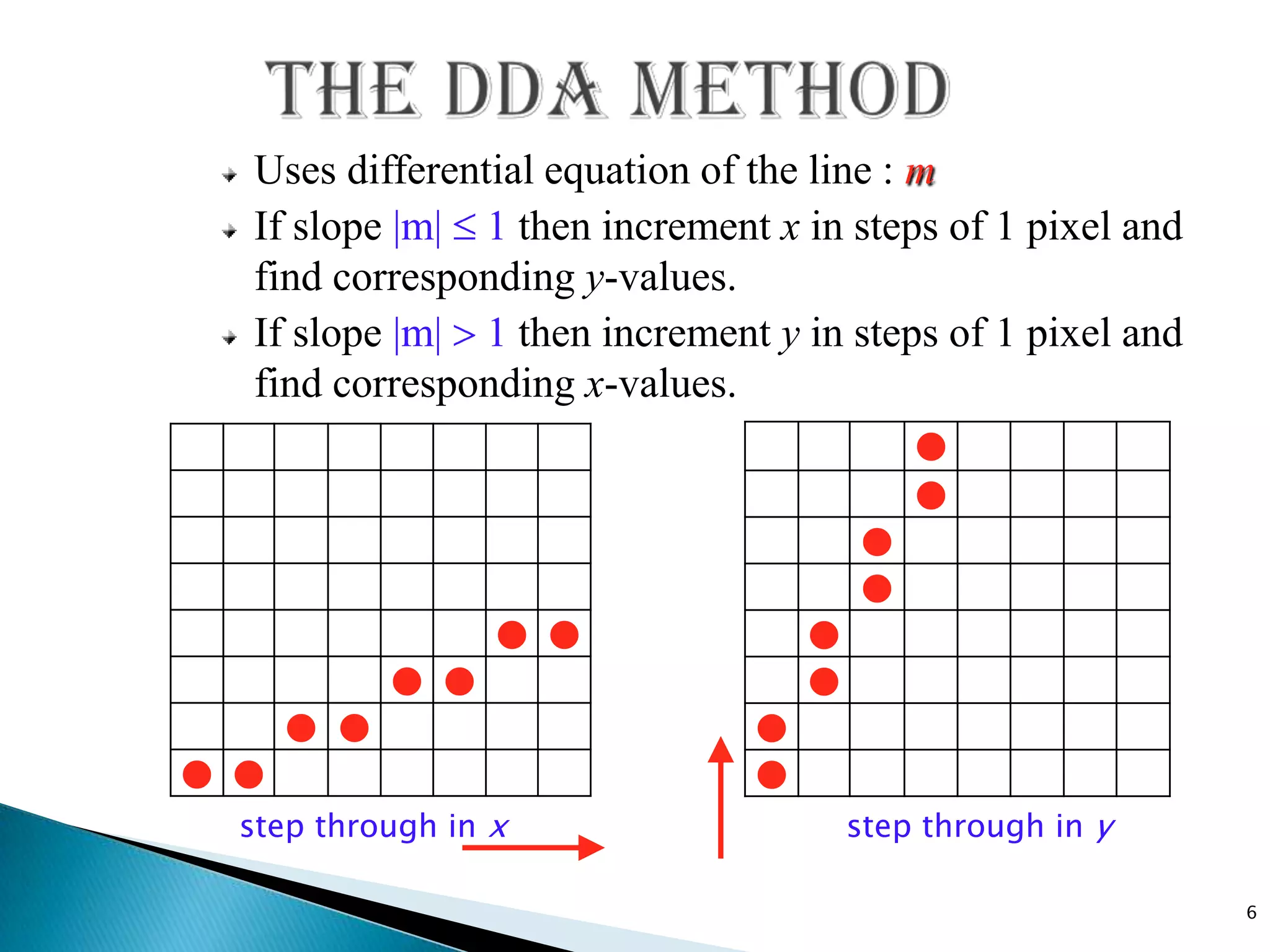
Uses differential equationof the line : m
If slope |m| 1 then increment x in steps of 1 pixel and
find corresponding y-values.
If slope |m| 1 then increment y in steps of 1 pixel and
find corresponding x-values.
step through in x step through in y
6
7.
A linewith positive slope (Left to Right)
If m <= 1, sample at unit x intervals (Δx = 1)
and compute successive y values as:
yk+1 = yk + m.
If m >1, sample at unit y intervals (Δy =1) and
compute successive x values as:
xk+1 = xk + 1/m.
8.
A linewith positive slope (Right to Left)
If m <= 1, sample at unit x intervals (Δx =-1)
and
compute successive y values as:
yk+1 = yk – m
If m >1, sample at unit y intervals (Δy = -1) and
compute successive x values as:
xk+1 = xk - 1/m
9.
A linewith negative slope (Left to Right)
If |m| <= 1, sample at unit x intervals (Δx = 1)
and
compute successive y values as:
yk+1 = yk + m
If |m| >1, sample at unit y intervals (Δy =-1)
and compute successive x values as:
xk+1 = xk - 1/m
10.
A linewith negative slope (Right to Left)
If |m| <=1, sample at unit x intervals (Δx =1)
and
compute successive y values as:
yk+1 = yk - m
If |m| >1, sample at unit y intervals (Δy =1)
and compute successive x values as:
xk+1 = xk + 1/m
11.
1) Accept theend point co-ordinates of the
line segment AB ie A(x1,x2) and B(x2,y2).
2) Calculate dx and dy.
3) If abs(dx)>=abs(dy) then ,
Step=dx else Step=dy.
12.
4) Let xincrement = dx/Step ;
Let y increment = dy/Step.
5) Display the pixels at standing portion put
pixel (x,y,white).
6) Compute the next co-ordinate position along
the line path
xk+1 = xk + x increment
yk+1 = yk + y increment
Put Pixel(xk+1 , yk+1 ,white).
13.
7) If xk+1=x2OR / AND yk+1=y2
then STOP else go to Step (4).
15.
1) In Bresenham’sLine Drawing Algorithm the
pixel positions along a line path are obtained by
determining the pixel i.e nearer the line at each
step.
2) It is an efficient raster line generation
algorithm.
16.
1) Accept theend point co-ordinates of the
line segment AB ie A(x1,x2) and B(x2,y2).
2) Calculate dx and dy.
3) If abs(dy)<=abs(dx) ie slope |m|<=1
(a) Compute initial decision parameter
Po= 2abs(dy)-abs(dx).
17.
(b) At eachxk position perform the following
if Pk <0 i.e d1< d2 then,
x increment=dx/abs(dx) AND y increment=0
Pk+1= Pk + 2abs(dy)
else,
Pk >0 ie d1>d2
X increment =dx/abs(dx)
Y increment =dy/abs(dy)
Pk+1= Pk +2abs(dy)-2abs(dx).
18.
4) If abs(dy)> abs(dx) ie slope |m|>1
(a) Compute initial decision parameter
Po= 2abs(dx)-abs(dy)
(b) At each xk position,perform the following if
Pk < 0 i.e d1 < d2 then
x increment=0
y increment=dy/abs(dy)
Pk+1= Pk + 2abs(dx)
19.
Else,
Pk>0 ie d1>d2
X increment=dx/abs(dx)
Y increment=dy/abs(dy)
Pk+1= Pk +2abs(dx)-2abs(dy).
5) Calculate : xnext = xk + x increment
ynext = yk + y increment.
Display (xk+1, yk+1, white).
20.
6) Repeat Step(3) to (5) until
xk+1=x2 AND /OR yk+1 =y2
7)STOP.
Mid-point Circle Algorithm
A method for direct distance comparison is
to test the halfway position between two
pixels to determine if this midpoint is inside
or outside the circle boundary.
This method is more easily applied to
other conics, and for an integer circle
radius.
23.
1) Accept theradius r and center (xc, yc).The
point of the circumference of a circle with
center as origin (x0, y0) =(0,r).
2) Calculate the initial decision parameter as
Po =5/4 –r .
3) At each xk position starting at k=0.Perform
the following test.
24.
If Pk <0then,
Xk+1= xk +1 and yk+1= yk
Pk+1 = Pk +2xk +3
Otherwise, Pk >0
Xk+1= xk +1 and Yk+1= yk -1
Pk+1= Pk +2( xk - yk ) +5
4) Determine the symmetric points in other 7
octants.
25.
5) Translate eachcalculated pixel position by
T ( xk , yk ) and display the pixel
X= xk+1 + xc AND Y= yk+1 + yc
Put pixel ( x,y, white).
6) Repeat step (3) to step (5) until x>=y.
7)STOP.
1) Accept theradius r and center (xc, yc).The
point of the circumference of a circle with center
as origin (x0, y0) =(0,r).
2) Calculate the initial decision parameter as
PO =3 – 2r.
3) At each xk position starting at k=0.Perform
the following test.
28.
If Pk <0then,
Xk+1= xk +1 and yk+1= yk
Pk+1 = Pk +4xk +6.
Otherwise, Pk > 0
Xk+1= xk +1 AND Yk+1= yk -1
Pk+1= Pk +4( xk - yk ) +10
4) Determine the symmetric points in other 7
octants.
29.
5) Translate eachcalculated pixel position by
T ( xk , yk ) and display the pixel
X= xk+1 + xc AND Y= yk+1 + yc
Put pixel ( x, y, white)
6) Repeat step (3) to step (5) until x>=y
7) STOP.
30.
The DDAalgorithm is accomplished by taking
unit step in one direction and calculating other.
The Bresenham’s Algorithm finds the closest
integer co-ordinate to the actual part.
DDA algorithm uses floating point calculation.
Bresenham’s uses integer point calculation.
DDA is more accurate compared to
Bresenhams.
31.
Circles andellipses can be efficiently and
accurately scan converted using midpoint
methods.
Bresenham’s line algorithm and the midpoint
line algorithm methods are the most efficient.


















































































![Chapter 3 - Part 1 [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/chapter3-part1autosaved-230109040832-9344385c-thumbnail.jpg?width=640&height=640&fit=bounds)