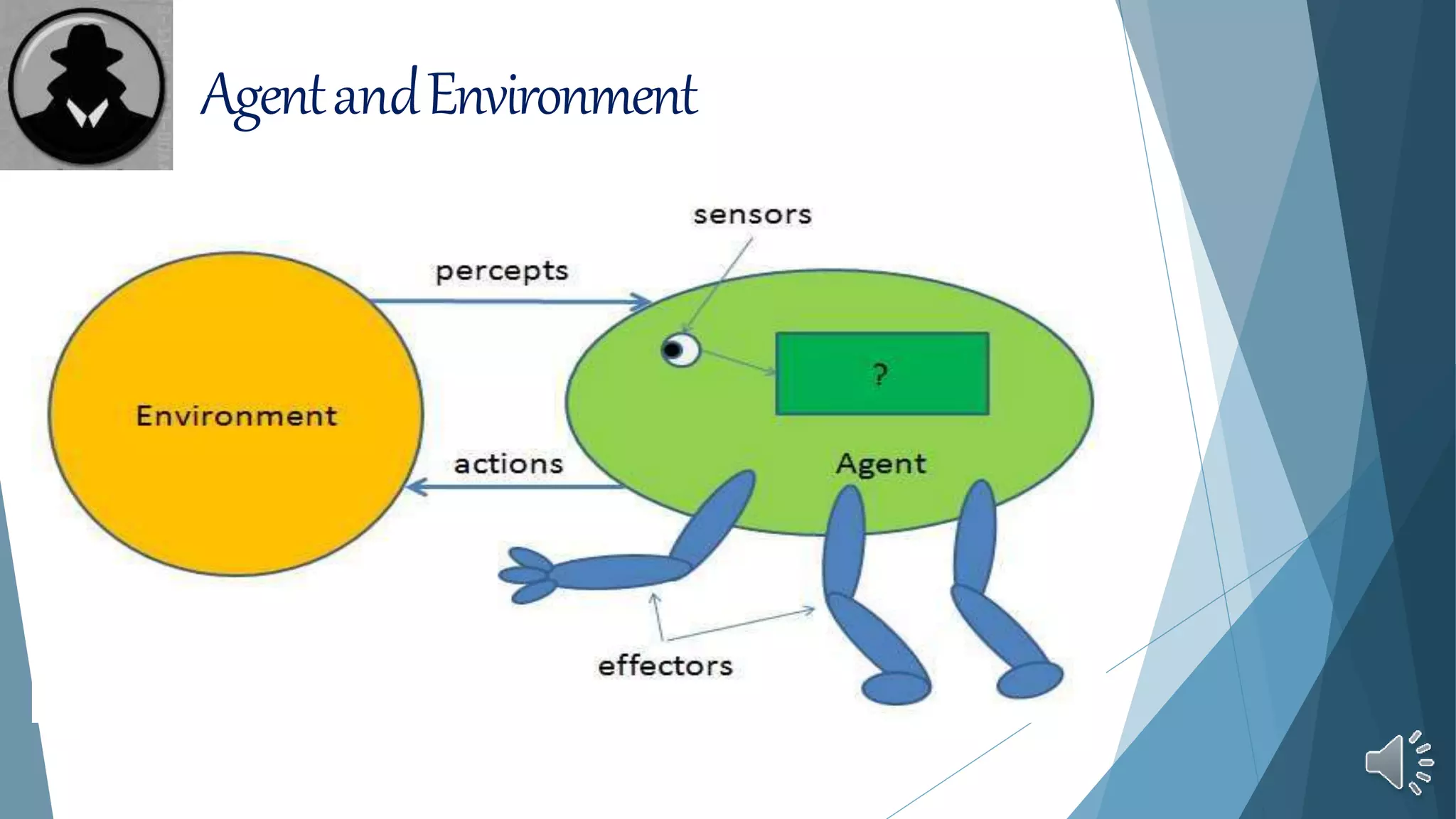


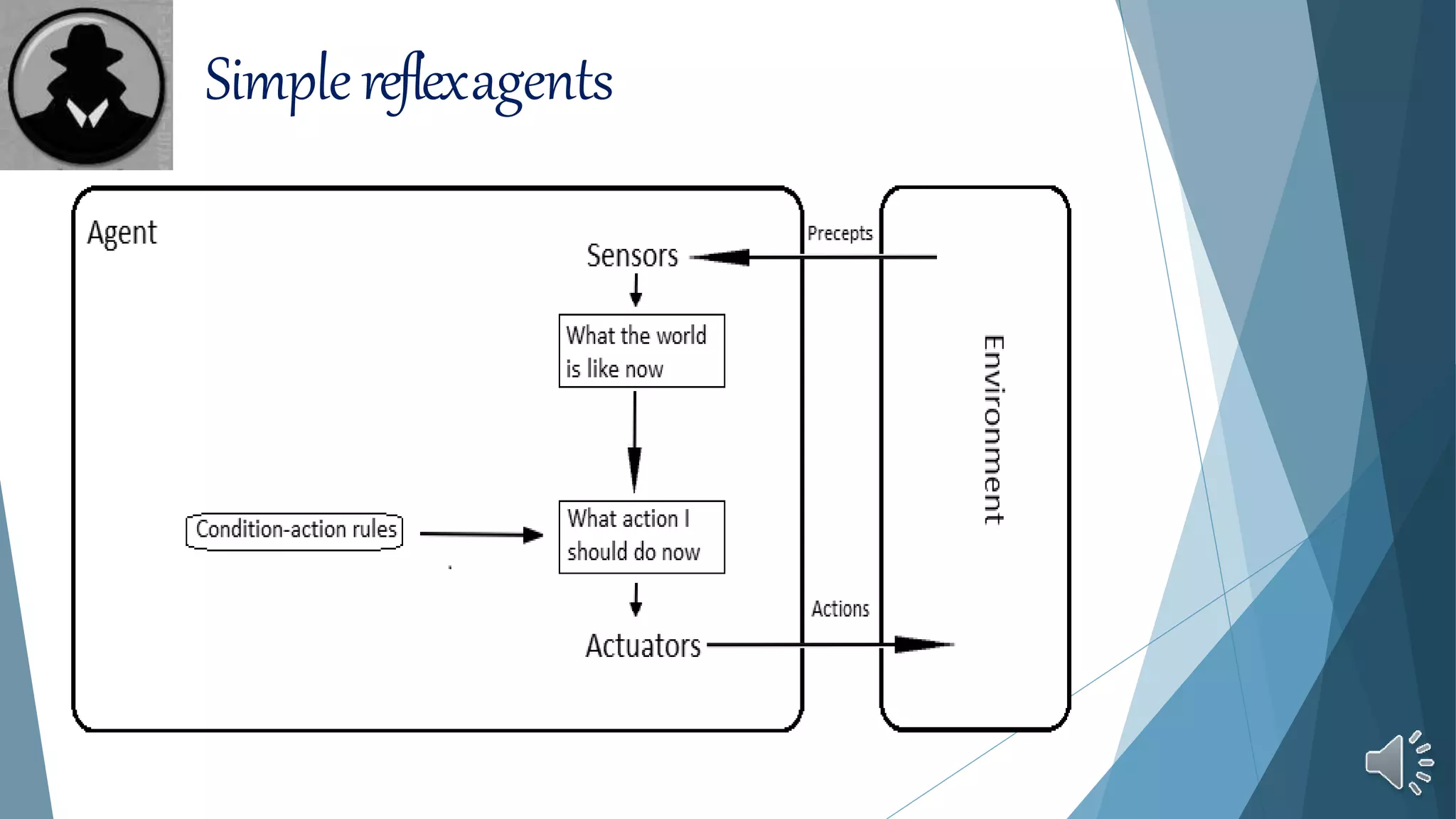
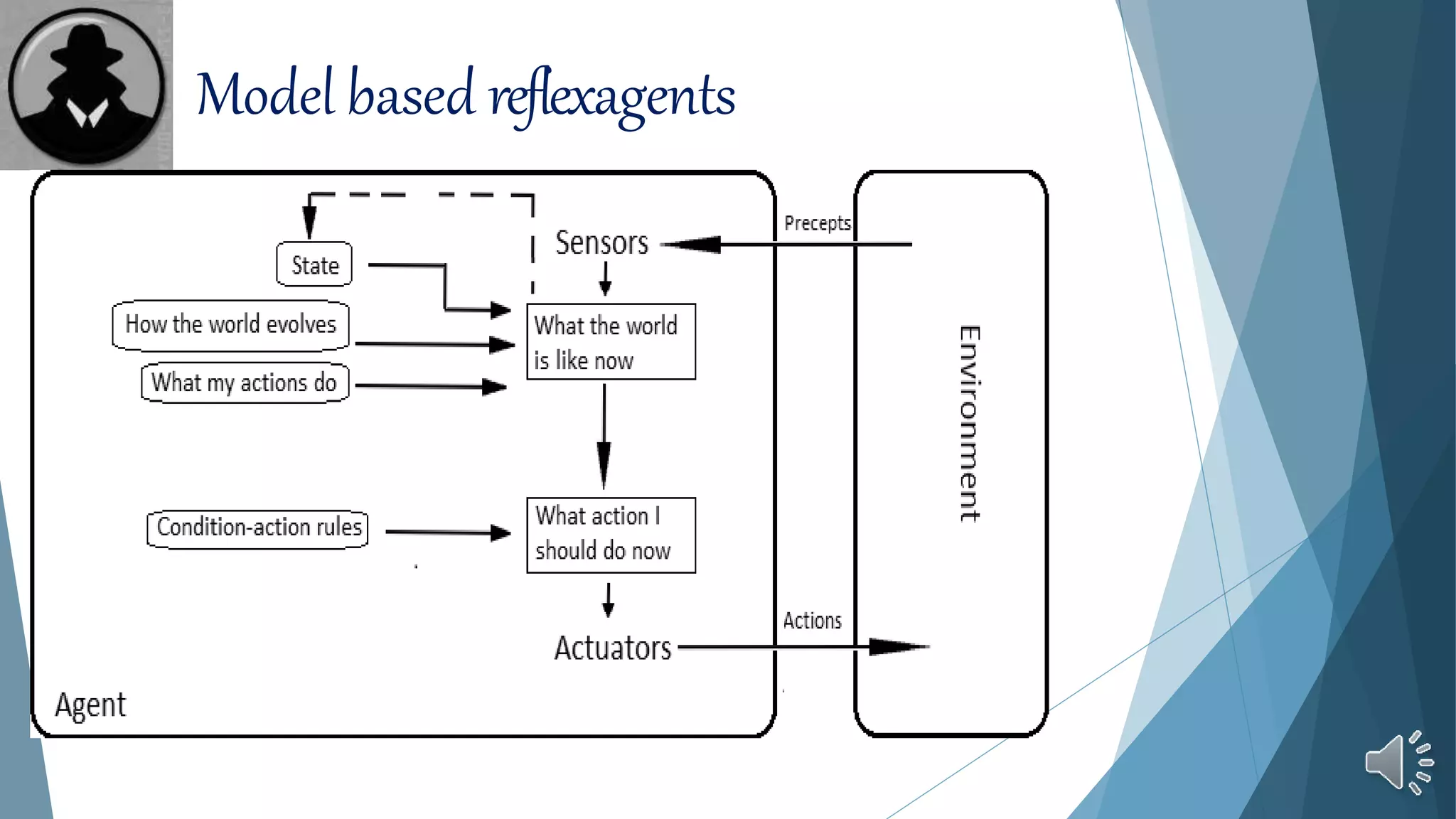
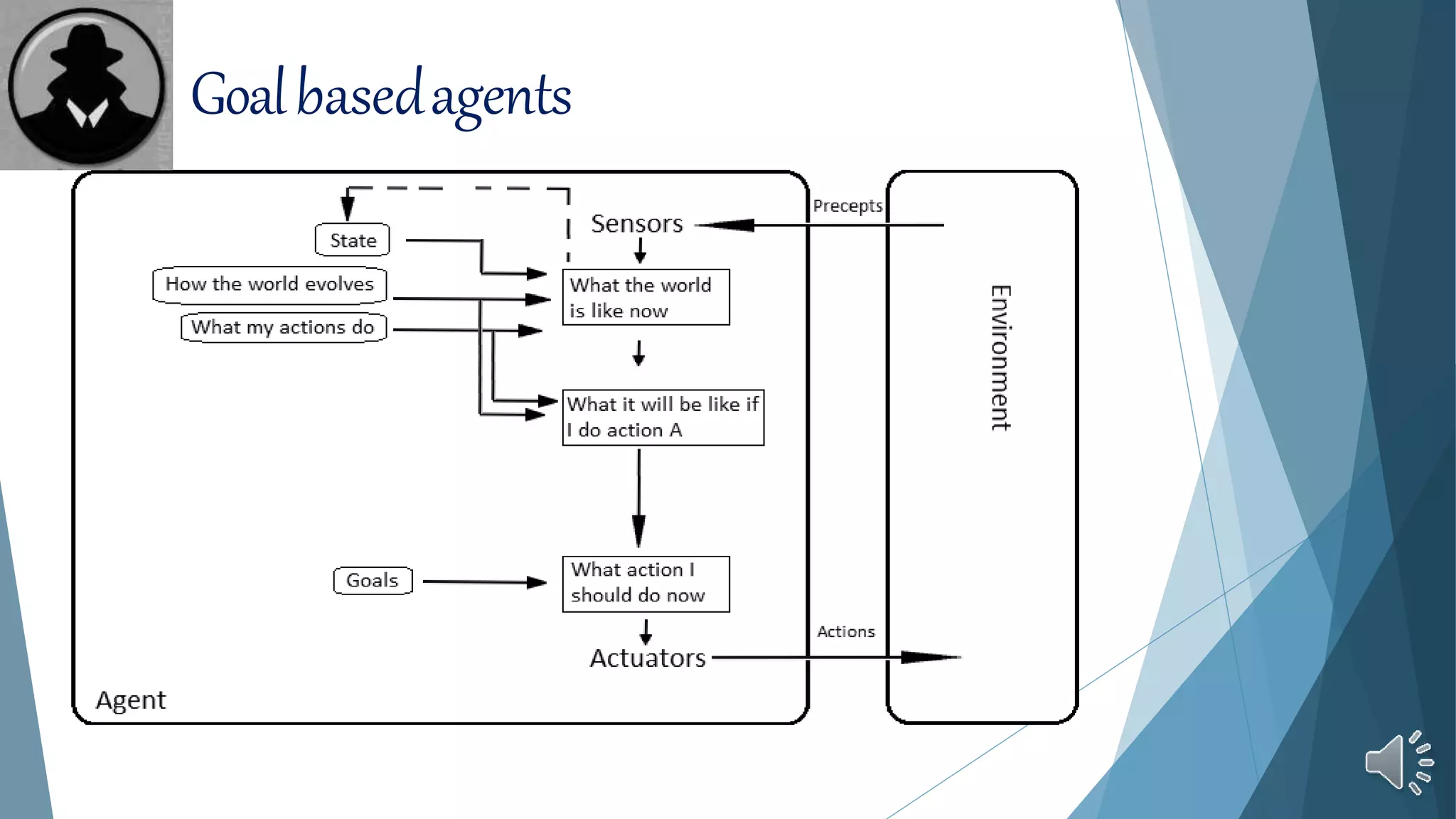
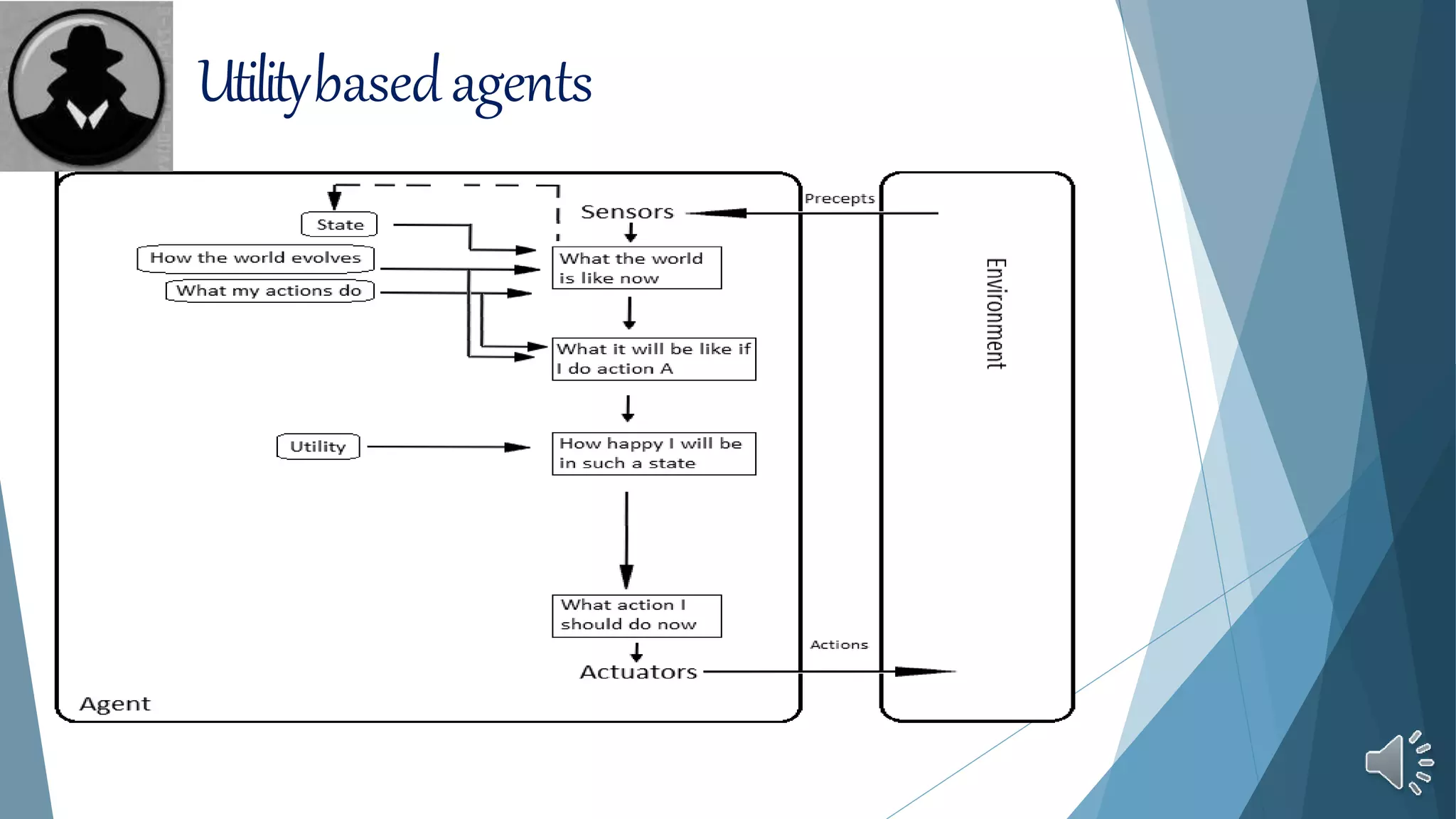
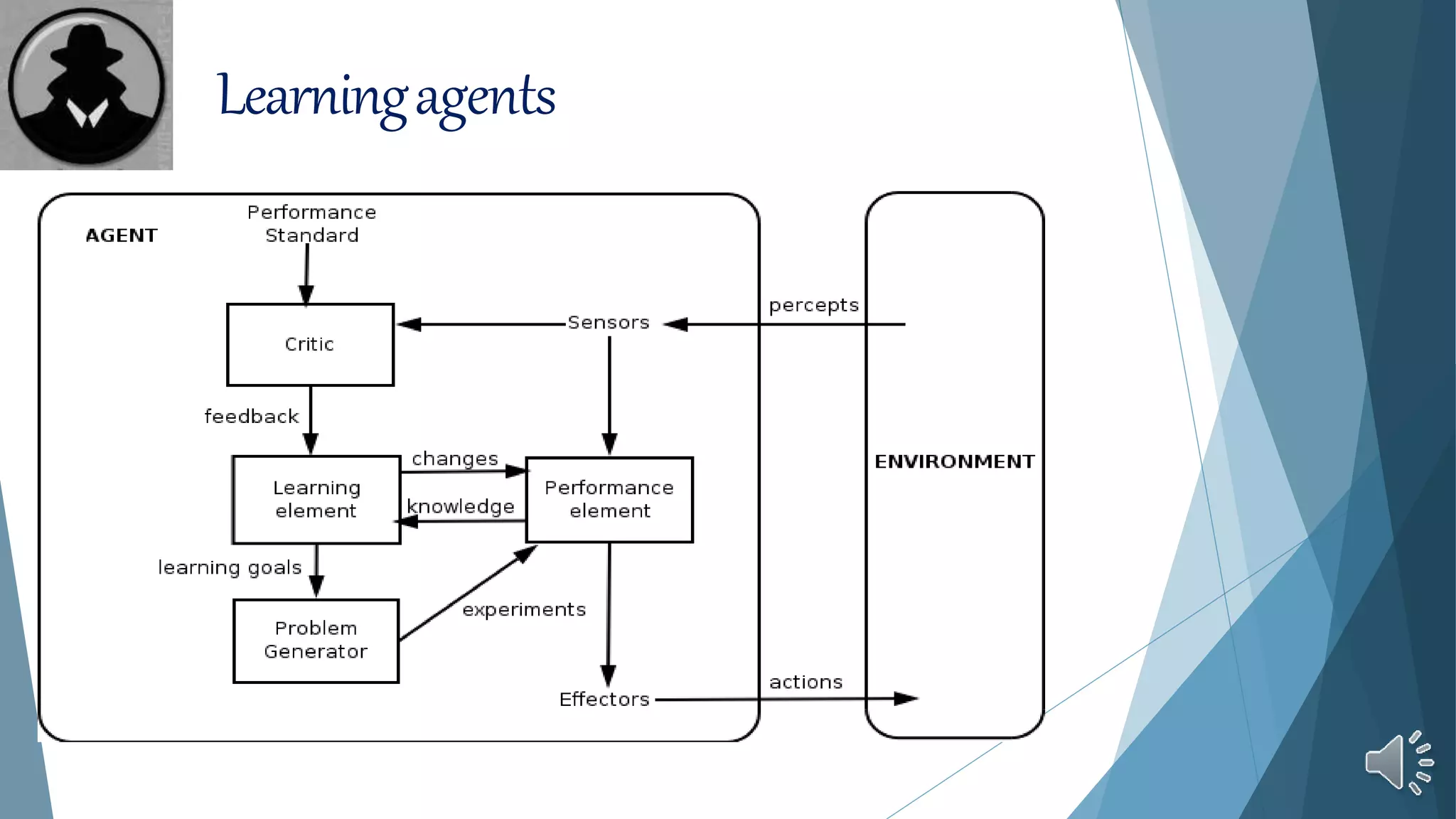
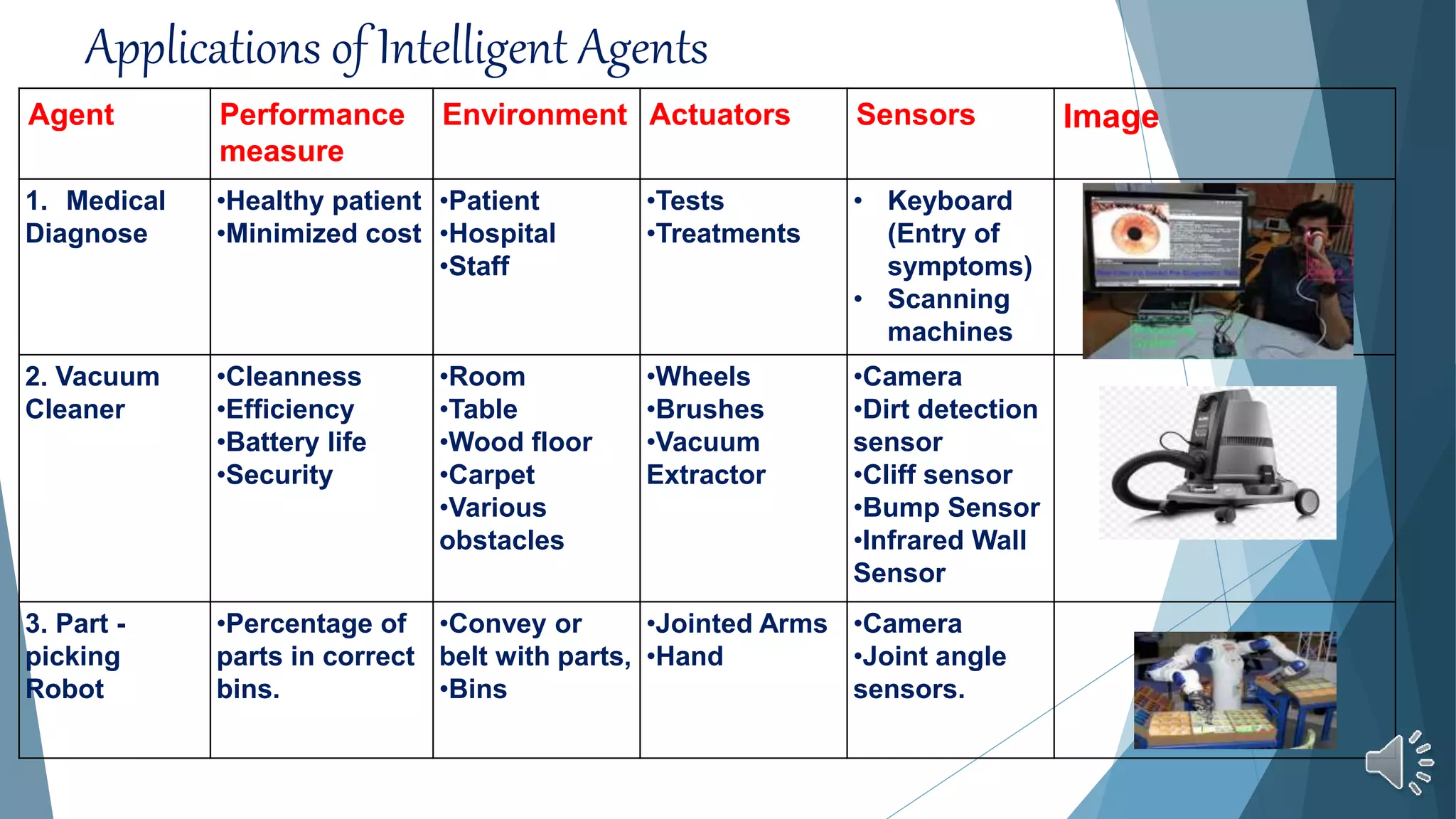




























The document discusses intelligent agents, defining them as anything that perceives its environment and takes action. It describes the key components of agents including goals, environments, and different classes of agents from simple reflex agents to learning agents. The document also provides examples of applications of intelligent agents such as medical diagnosis, vacuum cleaners, and part-picking robots.











































































![ANPARA THERMAL POWER STATION[1] sangam.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/anparathermalpowerstation1sangam-251121115219-9261cde4-thumbnail.jpg?width=640&height=640&fit=bounds)







